KR20200074488A - 차량 및 그 제어방법 - Google Patents
차량 및 그 제어방법 Download PDFInfo
- Publication number
- KR20200074488A KR20200074488A KR1020180162922A KR20180162922A KR20200074488A KR 20200074488 A KR20200074488 A KR 20200074488A KR 1020180162922 A KR1020180162922 A KR 1020180162922A KR 20180162922 A KR20180162922 A KR 20180162922A KR 20200074488 A KR20200074488 A KR 20200074488A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- tracking filter
- tracking
- sensor
- sensor modules
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0294—Trajectory determination or predictive filtering, e.g. target tracking or Kalman filtering
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/25—Fusion techniques
- G06F18/251—Fusion techniques of input or preprocessed data
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/277—Analysis of motion involving stochastic approaches, e.g. using Kalman filters
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/80—Fusion, i.e. combining data from various sources at the sensor level, preprocessing level, feature extraction level or classification level
- G06V10/803—Fusion, i.e. combining data from various sources at the sensor level, preprocessing level, feature extraction level or classification level of input or preprocessed data
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0019—Control system elements or transfer functions
- B60W2050/0022—Gains, weighting coefficients or weighting functions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0043—Signal treatments, identification of variables or parameters, parameter estimation or state estimation
- B60W2050/0052—Filtering, filters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4042—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10024—Color image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20024—Filtering details
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30241—Trajectory
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30261—Obstacle
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Radar, Positioning & Navigation (AREA)
- Mathematical Physics (AREA)
- Remote Sensing (AREA)
- Computing Systems (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Software Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- General Engineering & Computer Science (AREA)
- Traffic Control Systems (AREA)
Abstract
일 실시예에 따른 차량은, 복수개의 센서 모듈을 포함하고, 차량 주변에 위치하는 적어도 하나의 물체의 위치 정보를 획득하는 센서부; 및 상기 복수개의 센서 모듈과 상기 적어도 하나의 물체의 대응관계에 기초하여, 추적 필터를 결정하고, 상기 적어도 하나의 물체의 위치 정보 및 상기 추적 필터를 이용하여 상기 적어도 하나의 물체의 위치를 추적하는 제어부;를 포함한다.
Description
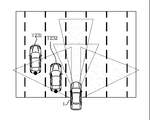
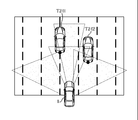
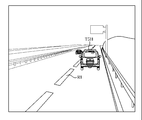
도2a 내지 도2d는 일 실시예에 따른 차량이 주행하는 주행 환경을 나타낸 도면이다.
도3및 도4는 일 실시예에 따른 차량 주변 물체의 위치 정보를 도출하는 것을 설명하기 위한 도면이다.
도5a 내지 도5c는 일 실시예에 따른 차량의 주행 예상 경로를 도출하는 동작을 설명하기 위한 도면이다.
도6a 및 도6b는 일 실시예에 따른 차선 정보를 이용하여 차량 주변의 물체를 추적하는 동작을 설명하기 위한 도면이다.
도7은 일 실시예에 따른 순서도이다.
100 : 센서부
110 : 카메라
120 : 레이다
130 : 라이다
200 : 제어부
210 : 필터 결정부
220 : 가중치 판단부
230 : 경로 예측부
Claims (12)
- 복수개의 센서 모듈을 포함하고,
차량 주변에 위치하는 적어도 하나의 물체의 위치 정보를 획득하는 센서부; 및
상기 복수개의 센서 모듈과 상기 적어도 하나의 물체의 대응관계에 기초하여, 추적 필터를 결정하고,
상기 적어도 하나의 물체의 위치 정보 및 상기 추적 필터를 이용하여 상기 적어도 하나의 물체의 위치를 추적하는 제어부;를 포함하는 차량.
- 제1항에 있어서,
상기 제어부는,
상기 복수개의 센서 모듈 중 하나의 센서 모듈과 하나의 물체가 대응되면,
제1추적 필터에 포함되는 추적 필터를 이용하여 상기 적어도 하나의 물체의 위치를 추적하는 차량.
- 제1항에 있어서,
상기 제어부는,
상기 복수개의 센서모듈 중 하나의 센서 모듈과 복수개의 물체가 대응되면,
제2추적 필터에 포함되는 추적필터를 이용하여 상기 하나의 물체의 위치를 추적하는 차량.
- 제1항에 있어서,
상기 제어부는,
상기 복수개의 센서모듈과 하나의 물체가 대응되면,
제1추적 필터에 포함되는 추적필터를 이용하여 상기 하나의 물체의 위치를 추적하는 차량.
- 제4항에 있어서,
상기 제어부는,
추적된 상기 하나의 물체의 위치를 기초로 상기 복수개의 센서모듈 각각의 신뢰도를 결정하고,
상기 신뢰도에 기초하여 상기 복수개의 센서모듈 각각이 획득한 상기 하나의 물체의 위치 정보에 가중치를 부여하여 상기 하나의 물체의 위치를 추적하는 차량.
- 제1항에 있어서,
상기 제어부는,
상기 적어도 하나의 물체의 위치 정보를 기초로 상기 적어도 하나의 물체의 예상 경로를 도출하고,
실시간으로 획득한 상기 적어도 하나의 물체의 위치 정보와 상기 예상 경로를 비교하여, 상기 적어도 하나의 물체의 위치를 추적하는 차량
- 제6항에 있어서,
상기 제어부는,
상기 적어도 하나의 물체의 위치를 추적하면,
상기 적어도 하나의 물체의 예상 경로의 변경을 무시하는 차량.
- 제1항에 있어서,
상기 센서부는,
상기 차량이 주행하는 차선 정보를 획득하고,
상기 제어부는,
상기 차선 정보 및 상기 적어도 하나의 물체의 이동 속도를 기초로 상기 복수개의 물체의 위치를 추적하는 차량.
- 차량 주변에 위치하는 적어도 하나의 물체의 위치 정보를 획득하고,
복수개의 센서 모듈과 상기 적어도 하나의 물체의 대응관계에 기초하여, 추적 필터를 결정하고,
상기 적어도 하나의 물체의 위치 정보 및 상기 추적 필터를 이용하여 상기 적어도 하나의 물체의 위치를 추적하는 것을 포함하는 차량 제어방법.
- 제9항에 있어서,
상기 추적 필터를 결정하는 것은,
상기 복수개의 센서 모듈 중 하나의 센서 모듈과 하나의 물체가 대응되면,
제1추적 필터에 포함되는 추적 필터를 이용하여 상기 적어도 하나의물체의 위치를 추적하는 것을 포함하는 차량 제어방법.
- 제9항에 있어서,
상기 추적 필터를 결정하는 것은,
상기 복수개의 센서모듈 중 하나의 센서 모듈과 복수개의 물체가 대응되면,
제2추적 필터에 포함되는 추적필터를 이용하여 상기 하나의 물체의 위치를 추적하는 것을 포함하는 차량 제어방법.
- 제9항에 있어서,
상기 추적 필터를 결정하는 것은,
상기 복수개의 센서모듈과 하나의 물체가 대응되면,
제1추적 필터에 포함되는 추적필터를 이용하여 상기 하나의 물체의 위치를 추적하는 차량 제어방법.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180162922A KR102636740B1 (ko) | 2018-12-17 | 2018-12-17 | 차량 및 그 제어방법 |
| US16/577,754 US11410428B2 (en) | 2018-12-17 | 2019-09-20 | Vehicle and control method thereof |
| CN201911007341.0A CN111391854B (zh) | 2018-12-17 | 2019-10-22 | 车辆及其控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180162922A KR102636740B1 (ko) | 2018-12-17 | 2018-12-17 | 차량 및 그 제어방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200074488A true KR20200074488A (ko) | 2020-06-25 |
| KR102636740B1 KR102636740B1 (ko) | 2024-02-15 |
Family
ID=71071681
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180162922A Active KR102636740B1 (ko) | 2018-12-17 | 2018-12-17 | 차량 및 그 제어방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11410428B2 (ko) |
| KR (1) | KR102636740B1 (ko) |
| CN (1) | CN111391854B (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240102060A (ko) * | 2022-12-23 | 2024-07-03 | 주식회사 에이치엘클레무브 | 센서 융합 시스템, 주행 보조 시스템 및 센서 융합 방법 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12387507B2 (en) * | 2020-12-30 | 2025-08-12 | Qatar University | Moving object and obstacle detection portable device using a millimeter wave radar and camera |
| US12606194B2 (en) * | 2022-04-29 | 2026-04-21 | Toyota Research Institute, Inc. | Coordinating use of different motion prediction models to predict a location of a mobile robot at a future point in time |
| US12564956B2 (en) * | 2023-02-13 | 2026-03-03 | Toyota Research Institute, Inc. | Estimating a trajectory of an object in an environment |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6125135B2 (ko) * | 1978-05-02 | 1986-06-14 | Suwa Seikosha Kk | |
| JP2005158012A (ja) * | 2003-11-07 | 2005-06-16 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2012043364A (ja) * | 2010-08-23 | 2012-03-01 | Toyota Motor Corp | 物体認識装置 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6567116B1 (en) * | 1998-11-20 | 2003-05-20 | James A. Aman | Multiple object tracking system |
| AUPP839199A0 (en) * | 1999-02-01 | 1999-02-25 | Traffic Pro Pty Ltd | Object recognition & tracking system |
| US6803997B2 (en) * | 2002-03-08 | 2004-10-12 | Anzus, Inc. | Gridlocking and correlation methods and arrangements |
| US7065465B2 (en) * | 2002-03-26 | 2006-06-20 | Lockheed Martin Corporation | Method and system for multi-sensor data fusion |
| JP2004093533A (ja) * | 2002-09-04 | 2004-03-25 | Mitsubishi Electric Corp | 多目標追尾装置 |
| US20070182623A1 (en) * | 2006-02-03 | 2007-08-09 | Shuqing Zeng | Method and apparatus for on-vehicle calibration and orientation of object-tracking systems |
| US8812226B2 (en) * | 2009-01-26 | 2014-08-19 | GM Global Technology Operations LLC | Multiobject fusion module for collision preparation system |
| FR2944629B1 (fr) * | 2009-04-17 | 2017-01-20 | Univ De Tech De Troyes | Systeme et procede de localisation de cible par un reseau de cameras |
| US8417490B1 (en) * | 2009-05-11 | 2013-04-09 | Eagle Harbor Holdings, Llc | System and method for the configuration of an automotive vehicle with modeled sensors |
| US20110025548A1 (en) * | 2009-07-31 | 2011-02-03 | Gm Global Technology Operations, Inc. | System and method for vehicle sensor fusion |
| US9090263B2 (en) * | 2010-07-20 | 2015-07-28 | GM Global Technology Operations LLC | Lane fusion system using forward-view and rear-view cameras |
| US9098753B1 (en) * | 2014-04-25 | 2015-08-04 | Google Inc. | Methods and systems for object detection using multiple sensors |
| US9652031B1 (en) * | 2014-06-17 | 2017-05-16 | Amazon Technologies, Inc. | Trust shifting for user position detection |
| US9720072B2 (en) * | 2014-08-28 | 2017-08-01 | Waymo Llc | Methods and systems for vehicle radar coordination and interference reduction |
| JP6439479B2 (ja) * | 2015-02-12 | 2018-12-19 | 株式会社ジェイテクト | 運転支援制御装置 |
| US20160259980A1 (en) * | 2015-03-03 | 2016-09-08 | Umm Al-Qura University | Systems and methodologies for performing intelligent perception based real-time counting |
| WO2016176487A1 (en) * | 2015-04-28 | 2016-11-03 | Henri Johnson | Systems to track a moving sports object |
| DE102015014139A1 (de) * | 2015-10-31 | 2017-05-04 | Daimler Ag | Verfahren zum Betreiben einer Abstands- und Geschwindigkeitsregelfunktion eines Fahrzeugs und Fahrerassistenzsystem zur Durchführung des Verfahrens |
| JP6194520B1 (ja) * | 2016-06-24 | 2017-09-13 | 三菱電機株式会社 | 物体認識装置、物体認識方法および自動運転システム |
| JP6125135B1 (ja) * | 2016-07-22 | 2017-05-10 | 三菱電機株式会社 | 運転支援装置、運転支援方法及び運転支援プログラム |
| GB2555779B (en) * | 2016-10-25 | 2020-06-03 | Openworks Eng Ltd | Acquisition and/or tracking of remote object |
| CA3050098A1 (en) * | 2017-01-17 | 2018-07-26 | Alarm.Com Incorporated | Dynamic drone navigation |
| US10935652B2 (en) * | 2018-06-26 | 2021-03-02 | GM Global Technology Operations LLC | Systems and methods for using road understanding to constrain radar tracks |
| US11301731B2 (en) * | 2018-09-17 | 2022-04-12 | Raytheon Company | Probabilistic sampling method for track association |
| US10634793B1 (en) * | 2018-12-24 | 2020-04-28 | Automotive Research & Testing Center | Lidar detection device of detecting close-distance obstacle and method thereof |
-
2018
- 2018-12-17 KR KR1020180162922A patent/KR102636740B1/ko active Active
-
2019
- 2019-09-20 US US16/577,754 patent/US11410428B2/en active Active
- 2019-10-22 CN CN201911007341.0A patent/CN111391854B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6125135B2 (ko) * | 1978-05-02 | 1986-06-14 | Suwa Seikosha Kk | |
| JP2005158012A (ja) * | 2003-11-07 | 2005-06-16 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2012043364A (ja) * | 2010-08-23 | 2012-03-01 | Toyota Motor Corp | 物体認識装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240102060A (ko) * | 2022-12-23 | 2024-07-03 | 주식회사 에이치엘클레무브 | 센서 융합 시스템, 주행 보조 시스템 및 센서 융합 방법 |
| US12511894B2 (en) | 2022-12-23 | 2025-12-30 | Hl Klemove Corp. | Apparatuses for driving assistance and methods for driving assistance |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200193182A1 (en) | 2020-06-18 |
| US11410428B2 (en) | 2022-08-09 |
| CN111391854A (zh) | 2020-07-10 |
| CN111391854B (zh) | 2024-11-01 |
| KR102636740B1 (ko) | 2024-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3208635B1 (en) | Vision algorithm performance using low level sensor fusion | |
| US9352690B2 (en) | Apparatus and method for detecting obstacle adaptively to vehicle speed | |
| KR102569900B1 (ko) | 전방위 센서퓨전 장치 및 그의 센서퓨전 방법과 그를 포함하는 차량 | |
| EP3283843B1 (en) | Generating 3-dimensional maps of a scene using passive and active measurements | |
| US10663974B2 (en) | Object recognition device, autonomous driving system including the same, and object recognition method using the object recognition device | |
| KR102850941B1 (ko) | 라이다 누화를 완화시키기 위한 라이다 시스템 설계 | |
| KR102456151B1 (ko) | 레이더 및 카메라 기반의 센서 퓨전 시스템 및 주변 차량의 위치 산출 방법 | |
| KR102636740B1 (ko) | 차량 및 그 제어방법 | |
| CN113853532A (zh) | 基于激光雷达和雷达的跟踪和映射系统及其方法 | |
| US11958480B2 (en) | Electronic control device and operation method | |
| US20180086342A1 (en) | Target-lane relationship recognition apparatus | |
| JP7013284B2 (ja) | 移動体挙動予測装置 | |
| KR20190051601A (ko) | 차량의 센서 데이터 연계 장치 및 방법 | |
| JP7840633B2 (ja) | 精度仕様を用いてビークルを位置特定するためのシステムおよび方法 | |
| KR20210056694A (ko) | 충돌을 회피하는 방법 및 이를 구현한 로봇 및 서버 | |
| KR102267040B1 (ko) | 객체 인식 장치, 이를 포함하는 자율 주행 시스템, 및 객체 인식 장치를 이용한 객체 인식 방법 | |
| WO2024234503A1 (zh) | 一种煤矿井下环境感知方法、装置及存储介质 | |
| KR20100066952A (ko) | 스테레오 비전을 이용하여 장애물을 추적하는 장치 및 방법 | |
| US11914679B2 (en) | Multispectral object-detection with thermal imaging | |
| KR20250086673A (ko) | 라이다 시스템 및 라이다 시스템을 작동하기 위한 방법 | |
| US20220404499A1 (en) | Distance measurement apparatus | |
| CN118671740A (zh) | 稳健的激光雷达到相机传感器对准 | |
| WO2019092874A1 (ja) | 物体認識装置および物体認識方法 | |
| JP6735801B2 (ja) | 物体認識装置およびこれを用いた車両制御装置並びに物体認識方法およびこれを用いた車両制御方法 | |
| US12384424B2 (en) | Device, method, and computer program for lane determination |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| AMND | Amendment | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0901 | Re-examination |
St.27 status event code: A-2-3-E10-E12-rex-PX0901 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PX0701 | Decision of registration after re-examination |
St.27 status event code: A-3-4-F10-F13-rex-PX0701 |
|
| X701 | Decision to grant (after re-examination) | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |