KR20200078210A - 가이드와이어의 조향을 위한 마이크로로봇 - Google Patents
가이드와이어의 조향을 위한 마이크로로봇 Download PDFInfo
- Publication number
- KR20200078210A KR20200078210A KR1020180167889A KR20180167889A KR20200078210A KR 20200078210 A KR20200078210 A KR 20200078210A KR 1020180167889 A KR1020180167889 A KR 1020180167889A KR 20180167889 A KR20180167889 A KR 20180167889A KR 20200078210 A KR20200078210 A KR 20200078210A
- Authority
- KR
- South Korea
- Prior art keywords
- magnetic body
- robot
- micro
- guide wire
- microrobot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/73—Manipulators for magnetic surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0158—Tip steering devices with magnetic or electrical means, e.g. by using piezo materials, electroactive polymers, magnetic materials or by heating of shape memory materials
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/72—Micromanipulators
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0116—Steering means as part of the catheter or advancing means; Markers for positioning self-propelled, e.g. autonomous robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0127—Magnetic means; Magnetic markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
- A61M25/09041—Mechanisms for insertion of guide wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/303—Surgical robots specifically adapted for manipulations within body lumens, e.g. within lumen of gut, spine, or blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F1/00—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties
- H01F1/01—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials
- H01F1/03—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials characterised by their coercivity
- H01F1/032—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials characterised by their coercivity of hard-magnetic materials
- H01F1/04—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials characterised by their coercivity of hard-magnetic materials metals or alloys
- H01F1/047—Alloys characterised by their composition
- H01F1/053—Alloys characterised by their composition containing rare earth metals
- H01F1/055—Alloys characterised by their composition containing rare earth metals and magnetic transition metals, e.g. SmCo5
- H01F1/0555—Alloys characterised by their composition containing rare earth metals and magnetic transition metals, e.g. SmCo5 pressed, sintered or bonded together
- H01F1/0558—Alloys characterised by their composition containing rare earth metals and magnetic transition metals, e.g. SmCo5 pressed, sintered or bonded together bonded together
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F1/00—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties
- H01F1/01—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials
- H01F1/03—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials characterised by their coercivity
- H01F1/032—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials characterised by their coercivity of hard-magnetic materials
- H01F1/04—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials characterised by their coercivity of hard-magnetic materials metals or alloys
- H01F1/047—Alloys characterised by their composition
- H01F1/053—Alloys characterised by their composition containing rare earth metals
- H01F1/055—Alloys characterised by their composition containing rare earth metals and magnetic transition metals, e.g. SmCo5
- H01F1/057—Alloys characterised by their composition containing rare earth metals and magnetic transition metals, e.g. SmCo5 and IIIa elements, e.g. Nd2Fe14B
- H01F1/0571—Alloys characterised by their composition containing rare earth metals and magnetic transition metals, e.g. SmCo5 and IIIa elements, e.g. Nd2Fe14B in the form of particles, e.g. rapid quenched powders or ribbon flakes
- H01F1/0575—Alloys characterised by their composition containing rare earth metals and magnetic transition metals, e.g. SmCo5 and IIIa elements, e.g. Nd2Fe14B in the form of particles, e.g. rapid quenched powders or ribbon flakes pressed, sintered or bonded together
- H01F1/0578—Alloys characterised by their composition containing rare earth metals and magnetic transition metals, e.g. SmCo5 and IIIa elements, e.g. Nd2Fe14B in the form of particles, e.g. rapid quenched powders or ribbon flakes pressed, sintered or bonded together bonded together
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Public Health (AREA)
- Anesthesiology (AREA)
- Biophysics (AREA)
- Pulmonology (AREA)
- Hematology (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Materials For Medical Uses (AREA)
Abstract
Description
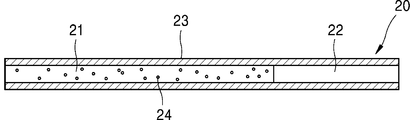
도 2 및 도 3은 마이크로로봇의 일 예를 도시한 도면들이다.
도 4는 가이드와이어에 장착된 마이크로로봇의 일 예를 도시한 도면이다.
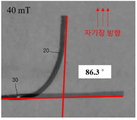
도 5는 마이크로로봇의 조향 각도를 측정한 일 실험예를 도시한 도면이다.
도 6a 및 도 6b는 마이크로로봇이 장착된 가이드와이어와 다른 가이드와이어의 조향 각도를 비교한 일 실험예를 도시한 도면들이다.
도 7a 및 도 7b는 마이크로로봇이 장착된 가이드와이어와 또 다른 가이드와이어의 조향 각도를 비교한 일 실험예를 도시한 도면들이다.
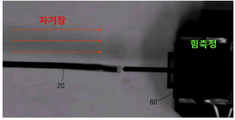
도 8a 및 도 8b는 마이크로로봇의 강성을 측정한 일 실험예를 도시한 도면들이다.
20: 마이크로로봇 21: 제1 자성체
22: 제2 자성체 23: 생체적합성 튜브
41: 유연한 소재 42: 자성체
51: 자기유동유체 60: 힘 측정 센서
Claims (12)
- 가이드와이어에 장착되는 마이크로로봇에 있어서,
제1 자성체; 및
상기 제1 자성체로부터 일 방향에 배치되는 제2 자성체를 포함하고,
상기 제1 자성체는 상기 제2 자성체보다 유연하고,
상기 제1 자성체는 외부 자기장의 방향이 변화함에 따라 상이한 각도로 구부러지는, 마이크로로봇. - 제1항에 있어서,
상기 제2 자성체는 상기 외부 자기장의 방향이 변화하여도 동일한 외형을 갖는, 마이크로로봇. - 제1항에 있어서,
상기 제1 자성체는 프라세오디뮴-철-코발트 합금 분말, 네오디뮴-철-붕소 합금 분말, 철 분말, 산화철 분말, 및 니켈 분말 중 적어도 어느 하나를 포함하는, 마이크로로봇. - 제1항에 있어서,
상기 제1 자성체는 폴리디메틸실록산, 젤라틴, 및 아가로스 겔 중 적어도 어느 하나를 포함하는, 마이크로로봇. - 제1항에 있어서,
상기 마이크로로봇의 폭은 0.5mm 이하인, 마이크로로봇. - 제1항에 있어서,
상기 마이크로로봇의 폭은 일정한, 마이크로로봇. - 제1항에 있어서,
상기 가이드와이어의 일부가 상기 마이크로로봇의 내부에 배치되고, 상기 가이드와이어의 나머지 일부가 상기 제1 자성체로부터 상기 일 방향의 반대 방향에 위치하도록, 상기 가이드와이어에 장착되는, 마이크로로봇. - 제1항에 있어서,
상기 가이드와이어의 일부가 상기 마이크로로봇의 내부에 배치되고, 상기 가이드와이어의 나머지 일부가 상기 제1 자성체로부터 상기 일 방향에 위치하도록, 상기 가이드와이어에 장착되는, 마이크로로봇. - 제1항에 있어서,
상기 제1 자성체 및 상기 제2 자성체 중 어느 하나가 상기 가이드와이어의 단부를 둘러싸도록 상기 가이드와이어에 장착되는, 마이크로로봇. - 제1항에 있어서,
상기 제1 자성체 및 상기 제2 자성체의 적어도 일부를 둘러싸고, 생체적합성 소재를 포함하는 생체적합성 튜브를 더 포함하는, 마이크로로봇. - 제1항에 있어서,
상기 제2 자성체는 상기 제1 자성체와 인접하게 배치되는, 마이크로로봇. - 제1항에 있어서,
상기 외부 자기장의 세기가 증가할수록 강성이 증가하는, 마이크로로봇.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180167889A KR102208265B1 (ko) | 2018-12-21 | 2018-12-21 | 가이드와이어의 조향을 위한 마이크로로봇 |
| EP19216994.4A EP3669810B1 (en) | 2018-12-21 | 2019-12-17 | Micro-robot for steering guidewire |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180167889A KR102208265B1 (ko) | 2018-12-21 | 2018-12-21 | 가이드와이어의 조향을 위한 마이크로로봇 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200078210A true KR20200078210A (ko) | 2020-07-01 |
| KR102208265B1 KR102208265B1 (ko) | 2021-01-27 |
Family
ID=68944223
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180167889A Active KR102208265B1 (ko) | 2018-12-21 | 2018-12-21 | 가이드와이어의 조향을 위한 마이크로로봇 |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3669810B1 (ko) |
| KR (1) | KR102208265B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220070126A (ko) * | 2020-11-20 | 2022-05-30 | 재단법인대구경북과학기술원 | 가이드와이어 조향용 마이크로 로봇 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114959944B (zh) * | 2022-06-21 | 2023-03-21 | 北京理工大学 | 一种软磁性导引导丝及其制备方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002526148A (ja) * | 1998-10-02 | 2002-08-20 | ステリオタクシス インコーポレイテツド | 身体の腔および洞から物質を取り除くための磁気的にナビゲート可能なおよび/または制御可能な装置 |
| KR101659367B1 (ko) * | 2015-10-13 | 2016-09-23 | 재단법인대구경북과학기술원 | 카테터 부착형 마이크로 로봇 |
| KR101831660B1 (ko) * | 2016-10-12 | 2018-02-23 | 원광대학교산학협력단 | 능동형 카테터 장치 및 이의 제어 시스템 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040133130A1 (en) * | 2003-01-06 | 2004-07-08 | Ferry Steven J. | Magnetically navigable medical guidewire |
| JP2005057023A (ja) * | 2003-08-04 | 2005-03-03 | Tdk Corp | 希土類フレキシブルシート磁石およびその製造方法 |
| US20060144407A1 (en) * | 2004-07-20 | 2006-07-06 | Anthony Aliberto | Magnetic navigation manipulation apparatus |
| CN101783219B (zh) * | 2009-01-21 | 2012-09-19 | 北京中科三环高技术股份有限公司 | 柔性粘结稀土永磁体及其制造方法 |
| EP3181176A1 (en) * | 2015-12-14 | 2017-06-21 | Aeon Scientific AG | Magnetically guided medical device |
| US10252030B2 (en) * | 2017-01-17 | 2019-04-09 | Cook Medical Technologies Llc | Handheld magnetic gun for guide wire manipulation |
-
2018
- 2018-12-21 KR KR1020180167889A patent/KR102208265B1/ko active Active
-
2019
- 2019-12-17 EP EP19216994.4A patent/EP3669810B1/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002526148A (ja) * | 1998-10-02 | 2002-08-20 | ステリオタクシス インコーポレイテツド | 身体の腔および洞から物質を取り除くための磁気的にナビゲート可能なおよび/または制御可能な装置 |
| KR101659367B1 (ko) * | 2015-10-13 | 2016-09-23 | 재단법인대구경북과학기술원 | 카테터 부착형 마이크로 로봇 |
| KR101831660B1 (ko) * | 2016-10-12 | 2018-02-23 | 원광대학교산학협력단 | 능동형 카테터 장치 및 이의 제어 시스템 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220070126A (ko) * | 2020-11-20 | 2022-05-30 | 재단법인대구경북과학기술원 | 가이드와이어 조향용 마이크로 로봇 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3669810A1 (en) | 2020-06-24 |
| KR102208265B1 (ko) | 2021-01-27 |
| EP3669810B1 (en) | 2024-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2619909C (en) | Stylet apparatuses and methods of manufacture | |
| EP3546008B1 (en) | Catheter and method for manufacturing catheter | |
| US20010037084A1 (en) | Steerable medical catheter with bendable encapsulated metal spring tip fused to polymeric shaft | |
| US11633567B2 (en) | Catheter and balloon catheter | |
| KR20190120157A (ko) | 조향 가능한 의료 디바이스 및 그 제조 방법 | |
| US20140188054A1 (en) | Medical tube and flexibility-variable mechanism with the same | |
| US10709871B2 (en) | Catheter having a steerable tip | |
| KR102208265B1 (ko) | 가이드와이어의 조향을 위한 마이크로로봇 | |
| EP3215210B1 (en) | Steerable medical device | |
| US11642493B2 (en) | Steerable guidewire and method for manufacturing steerable guidewire, steerable catheter and method for manufacturing steerable catheter | |
| US10850072B2 (en) | Wire member | |
| US20110276033A1 (en) | Wire guide and method of making same | |
| KR102220663B1 (ko) | 가이드와이어의 조향을 위한 마이크로로봇 | |
| EP3744379B1 (en) | Catheter | |
| EP3595761B1 (en) | Flexible elongated structure having a steerable end | |
| AU2013204243B2 (en) | Stylet apparatuses and methods of manufacture | |
| EP3546012A1 (en) | Medical instrument | |
| KR102638467B1 (ko) | 가이드와이어 마이크로로봇 및 그 제작 방법 | |
| EP3815732B1 (en) | Guide wire | |
| AU2012202293B2 (en) | Stylet apparatuses and methods of manufacture |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |