KR20200078507A - 센서 데이터를 결합하기 위한 방법 및 시스템 - Google Patents
센서 데이터를 결합하기 위한 방법 및 시스템 Download PDFInfo
- Publication number
- KR20200078507A KR20200078507A KR1020207011865A KR20207011865A KR20200078507A KR 20200078507 A KR20200078507 A KR 20200078507A KR 1020207011865 A KR1020207011865 A KR 1020207011865A KR 20207011865 A KR20207011865 A KR 20207011865A KR 20200078507 A KR20200078507 A KR 20200078507A
- Authority
- KR
- South Korea
- Prior art keywords
- data
- sensor
- time
- platform
- motion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 92
- 230000033001 locomotion Effects 0.000 claims abstract description 188
- 238000005259 measurement Methods 0.000 claims abstract description 45
- 238000004458 analytical method Methods 0.000 claims description 57
- 230000002441 reversible effect Effects 0.000 claims description 16
- 238000005070 sampling Methods 0.000 claims description 5
- 238000010923 batch production Methods 0.000 claims description 4
- 230000004044 response Effects 0.000 claims description 2
- 230000001419 dependent effect Effects 0.000 claims 1
- 230000006870 function Effects 0.000 description 13
- 238000012545 processing Methods 0.000 description 12
- 230000008859 change Effects 0.000 description 11
- 230000008901 benefit Effects 0.000 description 10
- 230000009183 running Effects 0.000 description 10
- 230000001133 acceleration Effects 0.000 description 9
- 230000009184 walking Effects 0.000 description 9
- 230000010354 integration Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 238000012937 correction Methods 0.000 description 4
- 238000011156 evaluation Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 230000001413 cellular effect Effects 0.000 description 2
- 230000009193 crawling Effects 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 238000009530 blood pressure measurement Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000001351 cycling effect Effects 0.000 description 1
- 238000007405 data analysis Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005021 gait Effects 0.000 description 1
- 230000005358 geomagnetic field Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 238000005293 physical law Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/005—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 with correlation of navigation data from several sources, e.g. map or contour matching
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
- G01C21/1652—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments with ranging devices, e.g. LIDAR or RADAR
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
- G01C21/1654—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments with electromagnetic compass
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
- G01C21/1656—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments with passive imaging devices, e.g. cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/18—Stabilised platforms, e.g. by gyroscope
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/183—Compensation of inertial measurements, e.g. for temperature effects
- G01C21/185—Compensation of inertial measurements, e.g. for temperature effects for gravity
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/183—Compensation of inertial measurements, e.g. for temperature effects
- G01C21/188—Compensation of inertial measurements, e.g. for temperature effects for accumulated errors, e.g. by coupling inertial systems with absolute positioning systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C22/00—Measuring distance traversed on the ground by vehicles, persons, animals or other moving solid bodies, e.g. using odometers, using pedometers
- G01C22/006—Pedometers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/396—Determining accuracy or reliability of position or pseudorange measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
- G01S19/485—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system whereby the further system is an optical system or imaging system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
- G01S19/49—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system whereby the further system is an inertial position system, e.g. loosely-coupled
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/01—Determining conditions which influence positioning, e.g. radio environment, state of motion or energy consumption
- G01S5/017—Detecting state or type of motion
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/01—Determining conditions which influence positioning, e.g. radio environment, state of motion or energy consumption
- G01S5/018—Involving non-radio wave signals or measurements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Navigation (AREA)
Abstract
Description
도 1은 본 발명을 구현할 수 있는 포터블 디바이스 (portable device)의 논리 다이어그램 (logical diagram) 개략도이다.
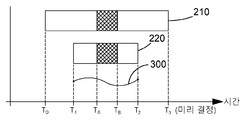
도 2는 제1 및 제2 시간 주기들의 센서들에 의해 얻어진 데이터를 개략적으로 나타난다.
도 3은 두 시간 인스턴스들 간 GNSS 센서에 의해 얻어진 위치 데이터 예를 개략적으로 도시한다.
도 4는 시간 인스턴스들 사이에서 결정된 스마트 폰의 위치의 진화를 개략적으로 도시한다.
도 5는 제1 및 제2 시간 주기들에 걸쳐 얻어진 데이터를 개략적으로 나타낸다.
도 6은 본 발명의 일 실시예의 주 단계들 (main steps)을 개설하는(outlining) 흐름도이다.
도 7은 본 발명의 추가 실시예의 주 단계들을 개설하는 흐름도이다.
도 8은 적어도 하나의 센서로부터의 데이터가 관심 메트릭의 진화를 결정하기 위해 사용될 수 있는 방법의 도식적 개요 (schematic overview)이다.
Claims (55)
- 시간에 따른 관심 메트릭 (metric of interest)의 진화 (evolution)를 결정하기 위해, 위치 또는 이동 (movement)이 결정될 수 있는 측정들을 하도록 구성된 적어도 하나의 센서로부터의 데이터를 결합하는 방법에 있어서,
제1 시간 주기에서, 제1 플랫폼에 장착된 제1 센서로부터 제1 데이터를 얻는 단계;
제2 시간 주기에서, 제2 플랫폼 또는 상기 제1 플랫폼에 장착된 제2 센서 및/또는 상기 제1 센서로부터 제2 데이터를 얻는 단계;
제1 및 제2 시간 인스턴스들 (time instances) 간 관심 메트릭의 상기 진화를 결정하는 단계 - 상기 제1 및 제2 시간 인스턴스들 중 적어도 하나는 상기 제1 및 제2 시간 주기들 중 적어도 하나 내에 있음 - 를 포함하고, 및
상기 관심 메트릭의 상기 진화는 제1 및/또는 제2 플랫폼의 모션 모델 (motion model), 상기 제1 데이터 및 제2 데이터 중 적어도 하나에 의해 제한 (constrained)되는,
방법.
- 제1항에 있어서,
상기 제1 및/또는 제2 데이터의 정확성 및/또는 상기 신뢰성을 평가하기 위해 적어도 상기 각각의 제1 및/또는 제2 시간 주기의 부분에 걸쳐 상기 제1 및/또는 제2 데이터를 분석하는 단계
를 더 포함하는 방법.
- 제1항 또는 제2항에 있어서,
정정된 제1 데이터 및/또는 정정된 제2 데이터를 얻기 위해 적어도 상기 각각의 제1 및/또는 제2 시간 주기에 걸쳐 상기 제1 및/도는 제2 데이터를 분석하는 단계를 더 포함하고,
상기 관심 메트릭의 상기 진화는 상기 제1 및/또는 제2 플랫폼의 모션 모델, 상기 정정된 제1 데이터 및 정정된 제2 데이터 중 적어도 하나에 의해 제한되는, 방법.
- 제2항 또는 제3항에 있어서,
상기 제1 및/또는 제2 데이터를 분석하는 상기 단계는 자기-일관성 체크들 (self-consistency checks)을 수행하는 단계
를 포함하는, 방법.
- 제2항 내지 제4항 중 어느 항에 있어서,
상기 제1 및/또는 제2 데이터를 분석하는 상기 단계는 상기 모션 모델 및/또는 상기 데이터를 서로 비교하는 단계
를 포함하는, 방법.
- 제2항 내지 제5항 중 어느 항에 있어서,
상기 제1 및/또는 제2 데이터의 최적의 분석을 허용하기 위해 서로에 대한 상기 제1 및 제2 시간 주기들의 오버랩 (overlap)의 양 (amount) 및/또는 상기 시간 구간들(durations)이 선택되는, 방법.
- 제6항에 있어서,
상기 제1 및 제2 시간 인스턴스들 및 상기 다른 시간 주기(들)에 관한 오버랩의 양 및 시간 주기의 상기 시간 구간은 상기 관련된 센서 데이터의 정확성 및/또는 상기 신뢰성의 변화들에 반응하여 동적으로 조정되는, 방법.
- 제1항 내지 제7항 중 어느 항에 있어서,
상기 제1 및 제2 데이터 중 적어도 하나는 시간상으로 역방향으로 (backwards) 분석되는, 방법.
- 제1항 내지 제8항 중 어느 항에 있어서,
상기 제1 및/또는 제2 데이터가 시간 상으로 순방향 및/또는 역방향으로 반복적 (iteratively)으로 분석되는, 방법.
- 제9항에 있어서,
상기 제1 및/또는 제2 데이터의 제1 분석이 적어도 하나의 신뢰 임계치 (confidence threshold)에 기초하고 상기 적어도 하나의 신뢰 임계치는 상기 제1 분석 이후에 수정되고(modified), 상기 제1 및/또는 제2 데이터의 다음 분석은 상기 수정된 신뢰 임계치에 기초하는, 방법.
- 제1항 내지 제10항 중 어느 항에 있어서,
상기 모션 모델은 상기 제1 플랫폼 및/또는 제2 플랫폼의 모션 콘텍스트 (motion context)를 포함하는 모션 콘텍스트 구성요소 (motion context component), 및 상기 제1 플랫폼 및/또는 제2 플랫폼의 위치 콘텍스트 (position context)를 포함하는 위치 콘텍스트 구성요소 (position context component) 중 적어도 하나를 포함하는, 방법.
- 제1항 내지 제11항 중 어느 항에 있어서,
상기 모션 모델은 상기 모션의 측면을 정량적으로 기술하는 적어도 하나의 파라미터, 및/또는 상기 모션의 측면을 정량적으로 기술하는 파라미터를 결정하기 위해 사용될 수 있는 적어도 하나의 함수를 포함하는, 방법.
- 제12항에 있어서,
상기 적어도 하나의 파라미터는, 보행자 스텝 길이, 보행자 스피드 (pedestrian speed), 보행자 높이, 보행자 다리 길이, 스테어 라이즈 (stair rise), 스테어 런 (stair run) 또는 모션의 방향 오프셋 (direction-of-motion offset)으로의 컴퍼스 헤딩 (compass-heading) 중 하나인, 방법.
- 제12항 또는 제13항에 있어서,
상기 적어도 하나의 함수는 보행자 스텝 길이 또는 스피드를 결정하는 함수인, 방법.
- 제1항 내지 제14항 중 어느 항에 있어서,
상기 모션 모델의 적어도 하나의 구성요소는 사용자에 의해 수동으로 정의되는, 방법.
- 제1항 내지 제15항 중 어느 항에 있어서,
상기 모션 모델의 적어도 하나의 구성요소는 상기 제1 및/또는 제2 데이터의 분석으로부터 자동적으로 결정되는, 방법.
- 제1항 내지 제16항 중 어느 항에 있어서,
상기 모션 모델의 적어도 하나의 구성요소는 관심 메트릭의 진화의 적어도 하나의 이전 결정 동안 상기 제1 및/또는 제2 센서로부터 얻어지는 데이터의 분석으로부터 자동적으로 결정되는, 방법.
- 제11항 내지 제17항 중 어느 항에 있어서,
상기 적어도 하나의 파라미터 및/또는 주어진 모션 모델의 함수는 상기 제1 및/또는 제2 플랫폼의 아이덴티티 (identity), 상기 위치 콘텍스트 또는 상기 모션 콘텍스트 중 적어도 하나에 의해 인덱스된 (indexed) 어드레서블 스토리지 (addressable storage)에 저장되는, 방법.
- 제1항 내지 제18항 중 어느 항에 있어서,
상기 제1 및/또는 제2 플랫폼들의 상기 모션 모델은 미리 선택된 모션 모델인, 방법.
- 제1항 내지 제19항 중 어느 항에 있어서,
상기 모션 모델은 자동적으로 선택된 모션 모델인, 방법.
- 제11항에 의존할 때 제20항에 있어서,
상기 모션 모델은 상기 제1 및/또는 제2 시간 인스턴스들 간 상기 시간 주기 동안 및/또는 상기 제1 및/또는 제2 시간 주기들 동안 상기 제1 및/또는 제2 센서들에 의해 얻어지는 상기 데이터의 분석들을 통해 상기 제1 및 제2 시간 인스턴스들 간 위치 콘텍스트 및 상기 모션 콘텍스트 중 적어도 하나를 결정하는 것에 의해 자동적으로 선택되는, 방법.
- 제21항에 있어서,
어드레서블 스토리지로부터 위치 콘텍스트, 모션 콘텍스트 및 상기 제1 및/또는 제2 플랫폼의 아이덴티티 중 적어도 하나를 사용하여 인덱스된 적어도 하나의 모션 모델 파라미터 및/또는 함수를 리콜(recall)하기 위해, 상기 결정된 위치 콘텍스트, 상기 결정된 모션 콘텍스트 및 상기 제1 및/또는 제2 플랫폼의 아이덴티티 중 적어도 하나를 사용하는 단계
를 더 포함하는, 방법.
- 제20항 또는 제21항에 있어서,
상기 모션 모델에 대한 함수 및/또는 적어도 하나의 모션 모델 파라미터를 결정하는 단계 및
상기 제1 및/또는 제2 플랫폼, 모션 콘텍스트 및 위치 콘텍스트의 아이덴티티 중 적어도 하나를 사용하여 인덱스 된 어드레서블 스토리지 내의 상기 적어도 하나의 모션 모델 파라미터 및/또는 함수를 저장하는 단계
를 더 포함하는, 방법.
- 제1항 내지 제23항 중 어느 항에 있어서,
상기 관심 메트릭의 상기 진화의 상기 제한하는 (constraining) 단계는 상기 제1 센서 및/또는 제2 센서의 측정 바이어스 (measurement bias)를 결정하는 단계 및 상기 바이어스를 정정하는 단계를 포함하는, 방법.
- 제1항 내지 제24항 중 어느 항에 있어서,
상기 관심 메트릭의 상기 진화의 상기 제한하는 (constraining) 단계는 상기 모션 모델에 대응하지 않는 상기 제1 및/또는 제2 데이터의 적어도 하나의 데이터 포인트를 결정하는 단계, 및 상기 적어도 하나의 데이터 포인트를 정정하는 단계를 포함하는, 방법.
- 제1항 내지 제25항 중 어느 항에 있어서,
상기 제2 데이터는 상기 제1 플랫폼에 장착된 제2 센서로부터 얻어지는, 방법.
- 제1항 내지 제25항 중 어느 항에 있어서,
상기 제2 데이터는 상기 제1 플랫폼과 상이한 제2 플랫폼에 장착된 제2 센서로부터 얻어지는, 방법.
- 제27항에 있어서,
상기 제1 및 제2 플랫폼들은 적어도 하나의 모션의 구성요소를 공통으로 갖는, 방법.
- 제27항 또는 제28항에 있어서,
상기 제1 및 제2 플랫폼들은 동일한 관심 바디 (body of interest)에 장착되는, 방법.
- 제1항 내지 제29항 중 어느 항에 있어서,
상기 제1 및 제2 시간 주기들은 적어도 부분적으로 오버랩하는, 방법.
- 제1항 내지 제29항 중 어느 항에 있어서,
상기 제1 및 제2 시간 주기들은 오버랩 하지 않는, 방법.
- 제1항 내지 제31항 중 어느 항에 있어서,
상기 제1 및 제2 시간 주기들 중 적어도 하나는 상기 제2 시간 인스턴스에 관해서 미래로 연장되는, 방법.
- 제1항 내지 제31항 중 어느 항에 있어서,
상기 제1 및/또는 제2 시간 주기는 상기 제2 시간 인스턴스에 관해서 실질적으로 (substantially) 미래로 연장되지 않는, 방법.
- 제1항 내지 제33항 중 어느 항에 있어서,
상기 관심 메트릭의 상기 진화는 근-실시간 (near-real-time)으로 계산되는, 방법.
- 제1항 내지 제33항 중 어느 항에 있어서,
상기 관심 메트릭은 배치 프로세스 (batch process)에서 계산되는, 방법. - 제1항 내지 제35항 중 어느 항에 있어서,
상기 제2 시간 주기는 상기 제1 시간 주기보다 긴, 방법.
- 제1항 내지 제36항 중 어느 항에 있어서,
상기 제2 데이터는 상기 제1 센서와 다른 제2 센서로부터 얻어지고, 및 상기 제1 센서는 상기 제2 센서보다 빠른 데이터 샘플링 레이트 (data sampling rate)를 갖는, 방법.
- 제1항 내지 제37항 중 어느 항에 있어서,
상기 제1 센서는 관성 측정 유닛(inertial measurement unit)인, 방법.
- 제1항 내지 제38항 중 어느 항에 있어서,
상기 제1 센서는 관성 항법 시스템(inertial navigation system)의 부분인, 방법.
- 제1항 내지 제39항 중 어느 항에 있어서,
상기 제1 센서는, 가속도계, 자이로스코프, 자력계 (magnetometer), 기압계 (barometer), GNSS 유닛, 라디오 주파수 수신기 (radio frequency receiver), 만보계 (pedometer), 카메라, 광 센서 (light sensor), 압력 센서 (pressure sensor), 스트레인 센서 (strain sensor), 근접 센서 (proximity sensor), RADAR 및 LIDAR 중 적어도 하나를 포함하는, 방법.
- 제1항 내지 제40항 중 어느 항에 있어서,
상기 제2 센서는, 가속도계, 자이로스코프, 자력계 (magnetometer), 기압계 (barometer), GNSS 유닛, 라디오 주파수 수신기 (radio frequency receiver), 만보계 (pedometer), 카메라, 광 센서 (light sensor), 압력 센서 (pressure sensor), 스트레인 센서 (strain sensor), 근접 센서 (proximity sensor), RADAR 및 LIDAR 중 적어도 하나를 포함하는, 방법.
- 제1항 내지 제41항 중 어느 항에 있어서,
제3 시간 주기에서, 상기 제1 센서, 제2 센서 및 제3 센서 중 적어도 하나로부터 제3 데이터를 얻는 단계를 더 포함하고, 상기 관심 메트릭의 상기 진화의 상기 결정은 상기 제3 데이터에 의해 더 제한되는, 방법.
- 제1항 내지 제42항 중 어느 항에 있어서,
상기 관심 메트릭은, 위치, 범위, 스피드, 속도 (velocity), 궤적, 고도, 컴퍼스 헤딩, 스테핑 케이던스 (stepping cadence), 스텝 길이, 이동 거리 (distance travelled), 모션 콘텍스트, 위치 콘텍스트, 출력 파워, 칼로리 카운트 (calorie count), 센서 바이어스, 센서 스케일 팩터 (sensor scale factor), 및 센서 정렬 에러 (sensor alignment error) 중 적어도 하나를 포함하는, 방법.
- 제1항 내지 제43항 중 어느 항에 있어서,
상기 제1플랫폼은 관심 바디에 장착된, 방법.
- 컴퓨터에 의해 실행될 때 상기 컴퓨터가 제1항 내지 제44항 중 어느 항의 상기 방법을 수행하도록 하는 실행 가능한 명령어들을 포함하는, 컴퓨터 판독 가능 매체.
- 시간에 따른 관심 메트릭 (metric of interest)의 진화 (evolution)를 결정하기 위해, 위치 또는 이동 (movement)이 결정될 수 있는 측정들을 하도록 구성된 적어도 하나의 센서, 및;
제1 시간 주기에서, 제1 플랫폼에 장착된 제1 센서로부터 제1 데이터를 얻는 단계;
제2 시간 주기에서, 제2 플랫폼 또는 상기 제1 플랫폼에 장착된 제2 센서 및/또는 상기 제1 센서로부터 제2 데이터를 얻는 단계;
제1 및 제2 시간 인스턴스들 (time instances) 간 관심 메트릭의 상기 진화를 결정하는 단계 - 상기 제1 및 제2 시간 인스턴스들 중 적어도 하나는 상기 제1 및 제2 시간 주기들 중 적어도 하나 내에 있음 -
의 단계들을 수행하도록 구성된 프로세서를 포함하고,
상기 관심 메트릭의 상기 진화는 제1 및/또는 제2 플랫폼의 모션 모델 (motion model), 상기 제1 데이터 및 제2 데이터 중 적어도 하나에 의해 제한 (constrained)되는,
시스템.
- 제46항에 있어서,
상기 제1 센서는 관성 측정 유닛인, 시스템.
- 제46항 또는 제47항에 있어서,
상기 제1 센서는 관성 항법 시스템의 부분인, 방법.
- 제46항 내지 제48항 중 어느 항에 있어서,
상기 제1 센서는, 가속도계, 자이로스코프, 자력계 (magnetometer), 기압계 (barometer), GNSS 유닛, 라디오 주파수 수신기 (radio frequency receiver), 만보계 (pedometer), 카메라, 광 센서 (light sensor), 압력 센서 (pressure sensor), 스트레인 센서 (strain sensor), 근접 센서 (proximity sensor), RADAR, 및 LIDAR 중 적어도 하나를 포함하는, 시스템.
- 제46항 내지 제49항 중 어느 항에 있어서,
상기 제2 센서는, 가속도계, 자이로스코프, 자력계 (magnetometer), 기압계 (barometer), GNSS 유닛, 라디오 주파수 수신기 (radio frequency receiver), 만보계 (pedometer), 카메라, 광 센서 (light sensor), 압력 센서 (pressure sensor), 스트레인 센서 (strain sensor), 근접 센서 (proximity sensor), RADAR, 및 LIDAR 중 적어도 하나를 포함하는, 시스템.
- 제46항 내지 제50항 중 어느 항에 있어서,
상기 관심 메트릭은, 위치, 범위, 스피드, 속도 (velocity), 궤적, 고도, 컴퍼스 헤딩, 스테핑 케이던스 (stepping cadence), 스텝 길이, 이동 거리 (distance travelled), 모션 콘텍스트, 위치 콘텍스트, 출력 파워, 칼로리 카운트 (calorie count), 센서 바이어스, 센서 스케일 팩터 (sensor scale factor), 및 센서 정렬 에러 (sensor alignment error) 중 적어도 하나를 포함하는, 시스템.
- 제46항 내지 제51항 중 어느 항에 있어서,
상기 제1 플랫폼에 장착된 제2 센서를 포함하는, 시스템.
- 제46항 내지 제51항 중 어느 항에 있어서,
상기 제1 플랫폼과 다른 제2 플랫폼에 장착된 제2 센서를 포함하는, 시스템.
- 제53항에 있어서,
상기 제1 및 제2플랫폼들은 적어도 하나의 모션 구성요소를 공통으로 갖는, 시스템.
- 제53항 또는 제54항에 있어서,
상기 제1 및 제2 플랫폼들은 동일한 관심 바디에 장착된, 시스템.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1717632.2A GB2567845B (en) | 2017-10-26 | 2017-10-26 | A method and system for combining sensor data |
| GB1717632.2 | 2017-10-26 | ||
| US15/894,841 US11035673B2 (en) | 2017-10-26 | 2018-02-12 | Method and system for combining sensor data |
| US15/894,841 | 2018-02-12 | ||
| PCT/GB2018/053105 WO2019081944A1 (en) | 2017-10-26 | 2018-10-26 | METHOD AND SYSTEM FOR COMBINING SENSOR DATA |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200078507A true KR20200078507A (ko) | 2020-07-01 |
| KR102666648B1 KR102666648B1 (ko) | 2024-05-17 |
Family
ID=60580106
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207011865A Active KR102666648B1 (ko) | 2017-10-26 | 2018-10-26 | 센서 데이터를 결합하기 위한 방법 및 시스템 |
Country Status (6)
| Country | Link |
|---|---|
| US (3) | US11035673B2 (ko) |
| EP (1) | EP3701286B1 (ko) |
| KR (1) | KR102666648B1 (ko) |
| CN (1) | CN111263900B (ko) |
| GB (1) | GB2567845B (ko) |
| WO (1) | WO2019081944A1 (ko) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017125512A1 (en) * | 2016-01-20 | 2017-07-27 | Koninklijke Philips N.V. | Occupancy sensing system and sensing method |
| US10859713B2 (en) * | 2017-01-04 | 2020-12-08 | Qualcomm Incorporated | Position-window extension for GNSS and visual-inertial-odometry (VIO) fusion |
| GB2567845B (en) * | 2017-10-26 | 2023-02-01 | Focal Point Positioning Ltd | A method and system for combining sensor data |
| US11167743B2 (en) * | 2018-04-03 | 2021-11-09 | AgJunction, LLC | Automatic pitch mounting compensation in an automatic steering system |
| GB201816655D0 (en) | 2018-10-12 | 2018-11-28 | Focal Point Positioning Ltd | A method of estimating a metric of interest related to the motion of a body |
| CN110109976B (zh) * | 2019-05-15 | 2021-09-10 | 成都四方伟业软件股份有限公司 | 数据处理方法、装置、系统及存储介质 |
| US11709279B2 (en) | 2019-08-14 | 2023-07-25 | Apple Inc. | Device orientation initialization |
| WO2021033113A1 (en) * | 2019-08-16 | 2021-02-25 | Thermo King Corporation | Environmental sensor for transport refrigeration |
| US11290183B2 (en) * | 2020-02-10 | 2022-03-29 | SA Photonics, Inc. | Feed-forward control of free space optical communication system based on inertial measurement unit |
| CN111637889A (zh) * | 2020-06-15 | 2020-09-08 | 中南大学 | 基于惯导和激光雷达三点测距的掘进机定位方法及系统 |
| US20240167819A1 (en) | 2020-06-17 | 2024-05-23 | Astra Navigation, Inc. | Correlating Overlapping Magnetic Measurement Data from Multiple Magnetic Navigation Devices and Updating a Geomagnetic Map with that Data |
| US12560435B2 (en) | 2020-06-17 | 2026-02-24 | Astra Navigation, Inc. | Generating a geomagnetic map |
| US11809193B2 (en) * | 2020-07-21 | 2023-11-07 | Tusimple, Inc. | Data-driven control for autonomous driving |
| WO2022029878A1 (ja) * | 2020-08-04 | 2022-02-10 | 三菱電機株式会社 | 車両制御装置 |
| KR20220107471A (ko) | 2021-01-25 | 2022-08-02 | 삼성전자주식회사 | 포즈 예측 방법, 포즈 예측 장치 및 포즈 예측에 기반한 증강 현실 안경 |
| FR3120437B1 (fr) * | 2021-03-02 | 2023-07-14 | Safran Electronics & Defense | Procede et centrale de calcul de donnees de navigation inertielle |
| WO2022261539A1 (en) * | 2021-06-11 | 2022-12-15 | The Regents Of The University Of California | Smartphone-based inertial odometry |
| US12498245B2 (en) | 2021-06-14 | 2025-12-16 | Astra Navigation, Inc. | Embedding a magnetic map into an image file |
| CN113899363B (zh) * | 2021-09-29 | 2022-10-21 | 北京百度网讯科技有限公司 | 车辆的定位方法、装置及自动驾驶车辆 |
| CN116106947B (zh) * | 2022-12-15 | 2025-09-26 | 宁波均胜智能汽车技术研究院有限公司 | 一种运载工具的定位方法和定位装置 |
| GB2626378A (en) | 2023-01-23 | 2024-07-24 | Focal Point Positioning Ltd | Wireless communications systems |
| FR3151088B1 (fr) * | 2023-07-13 | 2025-07-18 | Commissariat Energie Atomique | Procédé de détermination d’une trajectoire d’un porteur mobile en temps réel et en temps différé |
| US20250052909A1 (en) | 2023-08-08 | 2025-02-13 | Astra Navigation, Inc. | Using Magnetic-Sensor Data to Correct for INS Drift |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160252354A1 (en) * | 2015-02-26 | 2016-09-01 | Invensense, Inc. | Method and system for multiple pass smoothing |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7827000B2 (en) * | 2006-03-03 | 2010-11-02 | Garmin Switzerland Gmbh | Method and apparatus for estimating a motion parameter |
| CN101815314A (zh) * | 2009-02-20 | 2010-08-25 | 华为技术有限公司 | 发现无线网络问题的方法、装置及系统 |
| US20110238308A1 (en) * | 2010-03-26 | 2011-09-29 | Isaac Thomas Miller | Pedal navigation using leo signals and body-mounted sensors |
| US9579048B2 (en) * | 2012-07-30 | 2017-02-28 | Treefrog Developments, Inc | Activity monitoring system with haptic feedback |
| US9161172B2 (en) * | 2012-11-06 | 2015-10-13 | Qualcomm Incorporated | Map-based adaptive sampling of orientation sensors for positioning |
| US20150185045A1 (en) * | 2013-12-30 | 2015-07-02 | Aliphcom | Dynamic calibration of relationships of motion units |
| FR3026216B1 (fr) * | 2014-09-18 | 2016-12-23 | Dassault Aviat | Systeme d'assistance au pilotage d'une plate-forme, et procede associe |
| DE102014219148A1 (de) * | 2014-09-23 | 2016-03-24 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Erstellen eines Bewegungsmodells eines Straßenverkehrsteilnehmers |
| FR3028031B1 (fr) * | 2014-10-29 | 2019-09-20 | Safran Electronics & Defense | Procede d'estimation d'un etat de navigation contraint en observabilite |
| WO2017016862A1 (en) * | 2015-07-27 | 2017-02-02 | Philips Lighting Holding B.V. | System and method for detecting ground position changes |
| US9743253B2 (en) * | 2015-08-27 | 2017-08-22 | Glopos Fzc | Method and arrangement for locating a mobile device |
| US10126134B2 (en) * | 2015-12-21 | 2018-11-13 | Invensense, Inc. | Method and system for estimating uncertainty for offline map information aided enhanced portable navigation |
| EP3211371B1 (en) * | 2016-02-26 | 2020-11-11 | InvenSense, Inc. | Method and system for multiple pass smoothing |
| US9780829B1 (en) | 2016-03-24 | 2017-10-03 | Focal Point Positioning Ltd. | Method, apparatus, computer program, chip set, or data structure for correlating a digital signal and a correlation code |
| US10321430B2 (en) | 2016-03-24 | 2019-06-11 | Focal Point Positioning Ltd. | Method, apparatus, computer program, chip set, or data structure for correlating a digital signal and a correlation code |
| US11808865B2 (en) | 2016-03-24 | 2023-11-07 | Focal Point Positioning Limited | Method and system for calibrating a system parameter |
| US9581467B1 (en) * | 2016-05-13 | 2017-02-28 | Google Inc. | Orientation estimation based on backward-forward bayesian filtering |
| GB2564406B (en) | 2017-07-06 | 2022-09-07 | Focal Point Positioning Ltd | Method and system for correcting the frequency or phase of a local signal generated using a local oscillator |
| US10983199B2 (en) * | 2017-08-11 | 2021-04-20 | Zoox, Inc. | Vehicle sensor calibration and localization |
| GB2566731A (en) | 2017-09-25 | 2019-03-27 | Focal Point Positioning Ltd | System for determining a physical metric such as position |
| GB2567845B (en) * | 2017-10-26 | 2023-02-01 | Focal Point Positioning Ltd | A method and system for combining sensor data |
-
2017
- 2017-10-26 GB GB1717632.2A patent/GB2567845B/en active Active
-
2018
- 2018-02-12 US US15/894,841 patent/US11035673B2/en active Active
- 2018-10-26 EP EP18797058.7A patent/EP3701286B1/en active Active
- 2018-10-26 KR KR1020207011865A patent/KR102666648B1/ko active Active
- 2018-10-26 CN CN201880069077.0A patent/CN111263900B/zh active Active
- 2018-10-26 WO PCT/GB2018/053105 patent/WO2019081944A1/en not_active Ceased
-
2021
- 2021-05-10 US US17/315,461 patent/US11815355B2/en active Active
-
2023
- 2023-10-06 US US18/377,380 patent/US20240027194A1/en active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160252354A1 (en) * | 2015-02-26 | 2016-09-01 | Invensense, Inc. | Method and system for multiple pass smoothing |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019081944A1 (en) | 2019-05-02 |
| GB201717632D0 (en) | 2017-12-13 |
| EP3701286B1 (en) | 2024-03-27 |
| US11815355B2 (en) | 2023-11-14 |
| KR102666648B1 (ko) | 2024-05-17 |
| US20210278216A1 (en) | 2021-09-09 |
| CN111263900B (zh) | 2023-12-19 |
| US11035673B2 (en) | 2021-06-15 |
| GB2567845A (en) | 2019-05-01 |
| EP3701286A1 (en) | 2020-09-02 |
| GB2567845B (en) | 2023-02-01 |
| CN111263900A (zh) | 2020-06-09 |
| US20240027194A1 (en) | 2024-01-25 |
| US20190128673A1 (en) | 2019-05-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11815355B2 (en) | Method and system for combining sensor data | |
| US20250283722A1 (en) | Method of estimating a metric of interest related to the motion of a body | |
| US9360323B2 (en) | Systems and methods for estimating movements of a vehicle using a mobile device | |
| JP6676147B2 (ja) | 加速度計支援型ナビゲーションのための方法 | |
| US9234767B2 (en) | Running condition detection device, running condition detection method, and recording medium | |
| JP6674791B2 (ja) | 混雑度推定方法、人数推定方法、混雑度推定プログラム、人数推定プログラム、および人数推定システム | |
| US10508920B2 (en) | Pedestrian dead reckoning position tracker | |
| US10240929B2 (en) | Methods and systems for vertical trajectory determination and automatic jump detection | |
| JP5953677B2 (ja) | 情報処理装置、情報処理方法、プログラム、及び記録媒体 | |
| CN104678415A (zh) | 车辆位置推测系统及其方法 | |
| CN112762944A (zh) | 零速区间检测及零速更新方法 | |
| KR102100891B1 (ko) | 스마트폰을 이용한 실내 측위 방법, 이를 수행하기 위한 시스템 및 기록매체 | |
| CN119289978A (zh) | 数据处理方法、装置、电子设备及芯片 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200423 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210712 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20230829 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20240215 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20240513 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20240514 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |