KR20200079268A - 자동차량에서 탐지된 이벤트를 날짜-스탬핑하는 시스템 및 방법 - Google Patents
자동차량에서 탐지된 이벤트를 날짜-스탬핑하는 시스템 및 방법 Download PDFInfo
- Publication number
- KR20200079268A KR20200079268A KR1020207014374A KR20207014374A KR20200079268A KR 20200079268 A KR20200079268 A KR 20200079268A KR 1020207014374 A KR1020207014374 A KR 1020207014374A KR 20207014374 A KR20207014374 A KR 20207014374A KR 20200079268 A KR20200079268 A KR 20200079268A
- Authority
- KR
- South Korea
- Prior art keywords
- time
- trel
- sensor
- relative
- absolute
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J3/00—Time-division multiplex systems
- H04J3/02—Details
- H04J3/06—Synchronising arrangements
- H04J3/0635—Clock or time synchronisation in a network
- H04J3/0638—Clock or time synchronisation among nodes; Internode synchronisation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L7/00—Arrangements for synchronising receiver with transmitter
- H04L7/04—Speed or phase control by synchronisation signals
- H04L7/08—Speed or phase control by synchronisation signals the synchronisation signals recurring cyclically
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40169—Flexible bus arrangements
- H04L12/40176—Flexible bus arrangements involving redundancy
- H04L12/40189—Flexible bus arrangements involving redundancy by using a plurality of bus systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40208—Bus networks characterized by the use of a particular bus standard
- H04L2012/40215—Controller Area Network CAN
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40267—Bus for use in transportation systems
- H04L2012/40273—Bus for use in transportation systems the transportation system being a vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Synchronisation In Digital Transmission Systems (AREA)
Abstract
Description
도 1은 자동차량 내 본 발명에 따른 이벤트의 날짜-스탬핑을 위한 아주 도식적인 방식의 시스템을 보여준다.
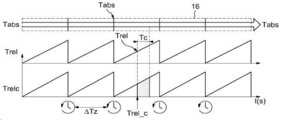
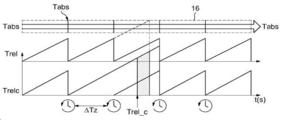
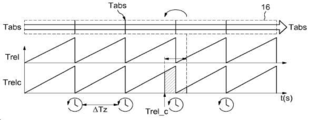
도 2 내지 도 4는 본 발명에 따른 이벤트의 시간, 제로 리셋 구간 및 절대적 클록 시간을 그래프로 보여준다.
도 5는 본 발명에 따른 자동차량 내 이벤트를 날짜-스탬핑하기 위한 방법의 흐름도를 보여준다.
Claims (11)
- 특히 자동차량 내에서 발생하는 이벤트를 날짜-스탬핑하기 위한 시스템으로,
상기 시스템은 복수의 센서들 (12) 및 전자 제어 유닛 (electronic control unit ECU (16))을 포함하며,
각 센서는 상대적 내부 클록 (14)을 포함하며, 상기 전자 제어 유닛은 절대적 내부 클록을 포함하며 통신 네트워크 (18)를 경유하여 상기 센서들 (12) 각각과 통신하도록 구성되며, 상기 전자 제어 유닛 (18)은:
- 센서에 의해 탐지된 각 이벤트에서, 그 탐지된 이벤트와 연관된 상기 센서 (12)의 상대적 클록 (14)으로부터 비롯하는 센서 상대적 시간 (Trel_c)을 자신의 입력부에서 수신하도록 구성된 데이터 프로세싱 모듈 (20);
- 상기 통신 네트워크 (18)의 통신 프레임들을 경유하여 상기 상대적 내부 클록들 (14) 모두에 대해 각 구간 (△Tz)에서 제로 (zero) 리셋 신호를 전송하도록 구성된 제로 리셋 모듈 (22); 그리고
- 센서 절대적 시간 (Tabs_c)을, 상기 프로세싱 모듈 (20)에 의해 수신된 상기 상대적 시간 (Trel_c)의 그리고 각 제로 리셋에서 상기 전자 제어 유닛 (16) 내 저장 모듈 (26)에 의해 저장된 제로 리셋 시간 (Tz)의 함수로서 계산하도록 구성되어, 레퍼런스 상대적 시간 (Trel)을 정의하는 계산 모듈 (24)을 포함하는 것을 특징으로 하는, 시스템. - 제1항에 있어서,
상기 센서 절대적 시간 (Tabs_c)을 계산하기 위한 상기 모듈 (24)은,
상기 탐지된 이벤트와 연관된 센서의 내부 클록의 상기 상대적 시간 (Trel_c)을 상기 전자 제어 유닛 (16)의 내부 클록의 상기 레퍼런스 상대적 시간 (Trel)과 비교하도록 구성된 모듈 (30)을 포함하는, 시스템. - 제2항에 있어서,
상기 센서 상대적 시간 (Trel_c)이 상기 레퍼런스 상대적 시간 (Trel)보다 더 작을 때에, 상기 계산 모듈 (24)은, 상기 센서 상대적 시간 (Trel_c)을 상기 저장 모듈 (26)에 의해 저장된 상기 제로 리셋 시간 (Tz)에 더하고 미리 정해진 프로세싱 시간 (Tc)을 뺌으로써, 상기 센서 절대적 시간 (Tabs_c)을 계산하도록 구성된, 시스템. - 제2항 또는 제3항에 있어서,
상기 센서 상대적 시간 (Trel_c)이 상기 레퍼런스 상대적 시간 (Trel)보다 더 클 때에, 상기 계산 모듈 (24)은, 상기 센서 상대적 시간 (Trel_c)을 상기 제로 리셋 구간 (△Tz)과 비교하도록 구성된 비교 모듈 (32)을 포함하며,
상기 센서 상대적 시간 (Trel_c)이 상기 제로 리셋 구간 (△Tz)보다 더 클 때에, 상기 계산 모듈 (24)은, {상기 센서 상대적 시간 (Trel_c) 모듈로 (modulo) 상기 제로 리셋 구간 (△Tz)} 연산의 결과를 상기 제로 리셋 시간 (Tz)에 더함으로써, 상기 센서 절대적 시간 (Tabs_c)을 계산하도록 구성되며; 그리고
상기 센서 상대적 시간 (Trel_c)이 상기 제로 리셋 구간 (△Tz)보다 더 작을 때에, 상기 계산 모듈 (24)은, 상기 센서 상대적 시간 (Trel_c)을 상기 저장 모듈 (26)에 의해 저장된 이전 시간 슬롯을 위한 제로 리셋 시간 (Tz-1)에 더함으로써, 상기 센서 절대적 시간 (Tabs_c)을 계산하도록 구성된, 시스템. - 제1항 내지 제4항 중 어느 한 항에 있어서,
상기 제로 리셋 구간 (△Tz)은 50 ms 및 500 ms 사이이며, 예를 들면, 100 ms와 동일한, 시스템. - 제1항 내지 제5항 중 어느 한 항에 있어서,
상기 전자 제어 유닛 (16)은,
상기 센서들의 상대적 시간들 (Trel_c)의 정밀도를 검증하며, 상기 센서들의 상기 상대적 시간들 (Trel_c)의 상대적 오차를 판별하도록 구성된 모듈 (28)을 포함하며,
상기 검증 모듈 (28)은,
상기 제로 리셋 이전에 각 센서 상대적 시간 (Trel_c)을 저장하고,
두 개의 연속적인 제로 리셋들 사이의 두 개의 센서 상대적 시간들 (Trel_c1, Trel_c2) 사이의 차이 (△Trel_c)를 계산하고,
상기 차이 (△Trel_c)를, 상기 두 개의 센서 상대적 시간들 (Trel_c1, Trel_c2)에 각각 대응하는 두 개의 연속적인 제로 리셋들 사이의 두 개의 절대적 시간들 (Tabs1, Tabs2) 사이의 상기 전자 제어 유닛 (16)의 내부 클록의 절대적 시간 차이 (△Tabs)와 비교하며, 그리고
두 개의 센서 상대적 시간들 사이의 상기 차이 (△Trel_c) 및 상기 절대적 시간 차이 (△Tabs) 사이의 차이에 대응하는 상대적 오차 (E)를 계산하도록 구성된, 시스템. - 자동차량 내에서 탐지된 이벤트를 날짜-스탬핑하기 위한 방법으로,
상기 자동차량은 복수의 센서들 (12) 및 전자 제어 유닛 (electronic control unit) (16)을 포함하며,
각 센서는 상대적 내부 클록 (14)을 포함하며, 상기 전자 제어 유닛은 절대적 내부 클록을 포함하며 통신 네트워크 (18)를 경유하여 상기 센서들 (12) 각각과 통신하도록 구성되며,
- 상기 센서들 (12)의 상기 상대적 내부 클록들 (14) 모두는 상기 통신 네트워크 (18)의 통신 프레임들을 경유하여 각 구간 (△Tz)에서 제로로 리셋되며;
- 상기 전자 제어 유닛 (16)의 상기 절대적 클록의 절대적 제로 리셋 시간 (Tz)은 각 제로 리셋 시에 저장되며;
- 이벤트가 탐지되며;
- 각 이벤트가 탐지될 때에, 상기 탐지된 이벤트와 연관된 센서의 상대적 클록 (14)으로부터 비롯하는 센서 상대적 시간 (Trel_c)이 수신되며; 그리고
- 센서 절대적 시간 (Tabs_c)이, 상기 탐지된 이벤트와 연관된 센서 (12)의 내부 클록 (14)의 상기 센서 상대적 시간 (Trel_c)의 그리고 각 제로 리셋에서 상기 전자 제어 유닛 (16) 내 저장 모듈 (26)에 의해 저장된 제로 리셋 시간 (Tz)의 함수로서 계산되어, 레퍼런스 상대적 시간 (Trel)을 정의하는 것을 특징으로 하는, 방법. - 제7항에 있어서,
상기 센서 절대적 시간 (Tabs_c)을 계산하는 동안에, 상기 탐지된 이벤트와 연관된 센서의 내부 클록의 상기 센서 상대적 시간 (Trel_c)은 상기 전자 제어 유닛 (16)의 내부 클록의 상기 레퍼런스 상대적 시간 (Trel)과 비교되는, 방법. - 제8항에 있어서,
상기 센서 상대적 시간 (Trel_c)이 상기 레퍼런스 상대적 시간 (Trel)보다 더 작을 때에, 상기 센서 절대적 시간 (Tabs_c)은, 상기 센서 상대적 시간 (Trel_c)을 상기 저장 모듈 (26)에 의해 저장된 상기 제로 리셋 시간 (Tz)에 더하고 미리 정해진 프로세싱 시간 (Tc)을 뺌으로써 계산되는, 방법. - 제8항 또는 제9항에 있어서,
상기 센서 상대적 시간 (Trel_c)이 상기 레퍼런스 상대적 시간 (Trel)보다 더 클 때에, 상기 센서 상대적 시간 (Trel_c)은 상기 제로 리셋 구간 (△Tz)과 비교되며;
상기 센서 상대적 시간 (Trel_c)이 상기 제로 리셋 구간 (△Tz)보다 더 클 때에, 상기 센서 절대적 시간 (Tabs_c)은, {상기 센서 상대적 시간 (Trel_c) 모듈로 (modulo) 상기 제로 리셋 구간 (△Tz)} 연산의 결과를 상기 제로 리셋 시간 (Tz)에 더함으로써 계산되며; 그리고
상기 센서 상대적 시간 (Trel_c)이 상기 제로 리셋 구간 (△Tz)보다 더 작을 때에, 상기 센서 절대적 시간 (Tabs_c)은, 상기 센서 상대적 시간 (Trel_c)을 상기 저장 모듈 (26)에 의해 저장된 이전 시간 슬롯을 위한 제로 리셋 시간 (Tz-1)에 더함으로써 계산되는, 방법. - 제7항 내지 제10항 중 어느 한 항에 있어서,
상기 센서들의 상대적 시간들 (Trel_c)의 정밀도를 검증하기 위해서,
상기 제로 리셋 이전에 각 센서 상대적 시간 (Trel_c)이 저장되고,
두 개의 연속적인 제로 리셋들 사이의 두 개의 센서 상대적 시간들 (Trel_c1, Trel_c2) 사이의 차이 (△Trel_c)가 계산되고,
상기 두 개의 센서 상대적 시간들 (Trel_c1, Trel_c2)에 각각 대응하는 두 개의 연속적인 제로 리셋들 사이의 두 개의 절대적 시간들 (Tabs1, Tabs2) 사이의 상기 전자 제어 유닛 (16)의 내부 클록의 절대적 시간 차이 (△Tabs)에 상기 차이 (△Trel_c)가 비교되며, 그리고
두 개의 센서 상대적 시간들 사이의 차이 (△Trel_c) 및 상기 절대적 시간 차이 (△Tabs) 사이의 차이에 대응하는 상대적 오차 (E)가 계산되는, 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1760872A FR3073957B1 (fr) | 2017-11-17 | 2017-11-17 | Systeme et procede de datation d'un evenement detecte dans un vehicule automobile |
| FR1760872 | 2017-11-17 | ||
| PCT/EP2018/081178 WO2019096816A1 (fr) | 2017-11-17 | 2018-11-14 | Système et procédé de datation d'un événement détecté dans un véhicule automobile |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200079268A true KR20200079268A (ko) | 2020-07-02 |
| KR102484423B1 KR102484423B1 (ko) | 2023-01-04 |
Family
ID=61913243
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207014374A Active KR102484423B1 (ko) | 2017-11-17 | 2018-11-14 | 자동차량에서 탐지된 이벤트를 날짜-스탬핑하는 시스템 및 방법 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11228419B2 (ko) |
| EP (1) | EP3711203B1 (ko) |
| KR (1) | KR102484423B1 (ko) |
| FR (1) | FR3073957B1 (ko) |
| WO (1) | WO2019096816A1 (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017217719A1 (de) * | 2017-10-05 | 2019-04-11 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur Überwachung eines Sensortaktsignals in einer Sensoreinheit |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101125671B1 (ko) * | 2010-07-29 | 2012-03-27 | 전북대학교산학협력단 | 타임 스탬프를 이용한 캔 통신 프로토콜 오류검출 방법 |
| US8645020B2 (en) * | 2012-06-21 | 2014-02-04 | Freescale Semiconductor, Inc. | Channel diagnostic system for sent receiver |
| WO2017001017A1 (en) * | 2015-07-02 | 2017-01-05 | Volvo Truck Corporation | A method for controlling a hydraulic hybrid vehicle |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE528607C2 (sv) * | 2004-04-30 | 2006-12-27 | Kvaser Consultant Ab | System och anordning för att tidsmässigt relatera händelser i ett fordon |
| US7581133B2 (en) | 2006-08-04 | 2009-08-25 | Dell Products, Lp | System and method of providing real time to devices within a server chassis |
| US8775681B2 (en) * | 2011-04-27 | 2014-07-08 | GM Global Technology Operations LLC | Cross-network synchronization of application S/W execution using flexray global time |
| DE102012204586B4 (de) * | 2012-03-22 | 2025-02-27 | Bayerische Motoren Werke Aktiengesellschaft | Gateway, Knoten und Verfahren für ein Fahrzeug |
| JP6384401B2 (ja) * | 2015-05-20 | 2018-09-05 | 株式会社デンソー | センサ装置、および、これを用いた電動パワーステアリング装置 |
| DE102015212218A1 (de) | 2015-06-30 | 2017-01-05 | Robert Bosch Gmbh | Dezentral synchronisiertes Multisensorsystem |
| WO2018133948A1 (en) * | 2017-01-23 | 2018-07-26 | Volvo Truck Corporation | A method and a system for controlling a vehicle during a downhill start |
-
2017
- 2017-11-17 FR FR1760872A patent/FR3073957B1/fr active Active
-
2018
- 2018-11-14 US US16/764,252 patent/US11228419B2/en not_active Expired - Fee Related
- 2018-11-14 EP EP18804267.5A patent/EP3711203B1/fr active Active
- 2018-11-14 WO PCT/EP2018/081178 patent/WO2019096816A1/fr not_active Ceased
- 2018-11-14 KR KR1020207014374A patent/KR102484423B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101125671B1 (ko) * | 2010-07-29 | 2012-03-27 | 전북대학교산학협력단 | 타임 스탬프를 이용한 캔 통신 프로토콜 오류검출 방법 |
| US8645020B2 (en) * | 2012-06-21 | 2014-02-04 | Freescale Semiconductor, Inc. | Channel diagnostic system for sent receiver |
| WO2017001017A1 (en) * | 2015-07-02 | 2017-01-05 | Volvo Truck Corporation | A method for controlling a hydraulic hybrid vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102484423B1 (ko) | 2023-01-04 |
| US11228419B2 (en) | 2022-01-18 |
| US20200403770A1 (en) | 2020-12-24 |
| EP3711203B1 (fr) | 2022-01-05 |
| FR3073957A1 (fr) | 2019-05-24 |
| EP3711203A1 (fr) | 2020-09-23 |
| WO2019096816A1 (fr) | 2019-05-23 |
| FR3073957B1 (fr) | 2019-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101489835B (zh) | 在机动车环境中检查测量值的似真度的方法和装置 | |
| US10422658B2 (en) | Method, fusion filter, and system for fusing sensor signals with different temporal signal output delays into a fusion data set | |
| CN104870260B (zh) | 用于输出指示物理测量参量的测量信号的装置 | |
| US11001149B2 (en) | Master electronic control device for vehicle, slave electronic control device for vehicle, log collection system for vehicle, and storage medium | |
| US20190232969A1 (en) | Data communication method for a vehicle | |
| US10274601B2 (en) | Communications system | |
| KR100998416B1 (ko) | 듀얼 콘트롤러 시스템의 통신 중재 장치 및 방법 | |
| US10623292B2 (en) | Receiver and event-detection-time-point estimation method | |
| CN106796126B (zh) | 用于实时地提供动态测量值的动态误差值的方法和系统 | |
| US11936767B2 (en) | Real-time computer system and method for controlling a system or a vehicle | |
| EP4107880B1 (en) | Method and system for performing time-synchronization | |
| CN115453580A (zh) | Gnss传感器的故障诊断方法、装置、导航系统及交通工具 | |
| KR102484423B1 (ko) | 자동차량에서 탐지된 이벤트를 날짜-스탬핑하는 시스템 및 방법 | |
| JP7482291B2 (ja) | クロック同期 | |
| KR101619628B1 (ko) | 차량 내 전자장치간의 데이터 동기화 방법 | |
| US10222786B2 (en) | Numerical control system having synchronous control function between units | |
| US8352238B2 (en) | Method and device for integrating a RF GPS emulator in a simulation environment | |
| CN111443685B (zh) | 用于在控制设备中提供通用时间的方法以及控制设备 | |
| CN114008488A (zh) | 用于在定位时进行误差评估的方法 | |
| KR102673340B1 (ko) | 통합항법장치 및 그 운용 방법 | |
| US20230019084A1 (en) | Triggering System | |
| Raju et al. | Time synchronized diagnostic event data recording based on AUTOSAR | |
| CN105024859B (zh) | 一种基于网络控制系统的部件故障估计方法及装置 | |
| JP2009292168A (ja) | 電子制御装置、電子制御システムおよび通信に関する制御方法 | |
| CN117295039B (zh) | 一种设备中的时间同步装置及方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| R11 | Change to the name of applicant or owner or transfer of ownership requested |
Free format text: ST27 STATUS EVENT CODE: A-5-5-R10-R11-ASN-PN2301 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R14-asn-PN2301 |
|
| R14 | Transfer of ownership recorded |
Free format text: ST27 STATUS EVENT CODE: A-5-5-R10-R14-ASN-PN2301 (AS PROVIDED BY THE NATIONAL OFFICE) |