KR20200080282A - 세그먼트를 갖는 이동 워크웨이 - Google Patents
세그먼트를 갖는 이동 워크웨이 Download PDFInfo
- Publication number
- KR20200080282A KR20200080282A KR1020207015215A KR20207015215A KR20200080282A KR 20200080282 A KR20200080282 A KR 20200080282A KR 1020207015215 A KR1020207015215 A KR 1020207015215A KR 20207015215 A KR20207015215 A KR 20207015215A KR 20200080282 A KR20200080282 A KR 20200080282A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- working
- segment
- zone
- segments
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B29/00—Safety devices of escalators or moving walkways
- B66B29/08—Means to facilitate passenger entry or exit
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B3/00—Parallel bars or similar apparatus
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63G—MERRY-GO-ROUNDS; SWINGS; ROCKING-HORSES; CHUTES; SWITCHBACKS; SIMILAR DEVICES FOR PUBLIC AMUSEMENT
- A63G1/00—Roundabouts
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63G—MERRY-GO-ROUNDS; SWINGS; ROCKING-HORSES; CHUTES; SWITCHBACKS; SIMILAR DEVICES FOR PUBLIC AMUSEMENT
- A63G3/00—Water roundabouts, e.g. freely floating
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63G—MERRY-GO-ROUNDS; SWINGS; ROCKING-HORSES; CHUTES; SWITCHBACKS; SIMILAR DEVICES FOR PUBLIC AMUSEMENT
- A63G3/00—Water roundabouts, e.g. freely floating
- A63G3/02—Water roundabouts, e.g. freely floating with floating seats
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63G—MERRY-GO-ROUNDS; SWINGS; ROCKING-HORSES; CHUTES; SWITCHBACKS; SIMILAR DEVICES FOR PUBLIC AMUSEMENT
- A63G31/00—Amusement arrangements
- A63G31/02—Amusement arrangements with moving substructures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B21/00—Kinds or types of escalators or moving walkways
- B66B21/10—Moving walkways
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B25/00—Control of escalators or moving walkways
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61B—RAILWAY SYSTEMS; EQUIPMENT THEREFOR NOT OTHERWISE PROVIDED FOR
- B61B12/00—Component parts, details or accessories not provided for in groups B61B7/00 - B61B11/00
- B61B12/02—Suspension of the load; Guiding means, e.g. wheels; Attaching traction cables
- B61B12/022—Vehicle receiving and dispatching devices
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Motorcycle And Bicycle Frame (AREA)
- Escalators And Moving Walkways (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Handcart (AREA)
Abstract
Description
도 1은 본 개시의 일 양태에 따른 놀이기구 스테이션의 실시예의 평면도이다.
도 2는 본 개시의 일 양태에 따른 놀이기구 스테이션의 실시예의 개략적인 정면도이다.
도 3은 본 개시의 일 양태에 따른, 도 1의 놀이기구 스테이션의 일 섹션의 실시예의 평면도이다.
도 4는 본 개시의 일 양태에 따른, 도 1의 놀이기구 스테이션의 다른 섹션의 실시예의 평면도이다.
도 5는 본 개시의 일 양태에 따른, 도 1의 놀이기구 스테이션의 다른 섹션의 실시예의 평면도이다.
도 6은 본 개시의 일 양태에 따른, 도 1의 놀이기구 스테이션의 다른 섹션의 실시예의 평면도이다.
도 7은 본 개시의 일 양태에 따른, 도 1의 놀이기구 스테이션의 다른 섹션의 실시예의 평면도이다.
도 8은 본 개시의 일 양태에 따른, 놀이기구 차량의 형상에 일치하는 워킹 세그먼트를 갖는 도 1 내지 도 7의 놀이기구 스테이션의 일 실시예의 평면도이다.
도 9는 본 개시의 일 양태에 따른, 놀이기구 차량의 형상에 일치하는 워킹 세그먼트를 갖는 도 1 내지 도 7의 놀이기구 스테이션의 일 실시예의 평면도이다.
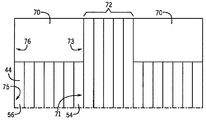
도 10은 본 개시의 일 양태에 따른, 워킹 세그먼트의 연장 이전의 도 1 내지 도 9의 놀이기구 스테이션의 일 실시예의 일 섹션의 평면도이다.
도 11은 본 개시의 일 양태에 따른, 워킹 세그먼트의 연장 이후의 도 1 내지 도 9의 놀이기구 스테이션의 일 실시예의 일 섹션의 평면도이다.
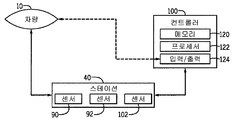
도 12는 본 개시의 일 양태에 따른, 도 1 내지 도 11의 놀이기구 스테이션을 작동시키기 위해 사용되는 특징부를 포함하는 시스템의 개략도이다.
도 13은 본 개시의 일 양태에 따른, 도 1 내지 도 12의 워킹 스테이션을 놀이기구 차량의 형상에 일치시키는데 사용되는 프로세스의 일 실시예의 흐름도이다.
Claims (20)
- 시스템에 있어서,
가동 서킷;
상기 가동 서킷에 커플링된 복수의 연장 모듈 ― 상기 복수의 연장 모듈의 각각의 연장 모듈은 각 워킹 세그먼트를 포함하며, 상기 복수의 연장 모듈의 각각의 연장 모듈은 각 워킹 세그먼트를 상기 가동 서킷으로부터 멀리 연장하도록 구성됨 ―; 및
차량의 한 위치에 기초하여 대응 워킹 세그먼트의 한 위치를 조정하기 위해서 복수의 연장 모듈 중 한 세트의 연장 모듈을 활성화시키도록 구성된 컨트롤러 ― 대응 워킹 세그먼트는 차량에서 승객의 로딩 및 언로딩을 용이하게 하도록 차량의 표면에 실질적으로 접하도록 구성됨 ―를 포함하는
시스템. - 제 1 항에 있어서,
상기 컨트롤러는, 대응 워킹 세그먼트가 차량의 표면과 접촉하게 연장되도록 한 세트의 연장 모듈을 활성화시키도록 구성되는
시스템. - 제 2 항에 있어서,
각 워킹 세그먼트는 각 워킹 세그먼트와 차량의 표면 사이의 접촉을 감지하도록 구성된 센서를 포함하는
시스템. - 제 2 항에 있어서,
각 워킹 세그먼트는 각 워킹 세그먼트와 차량 사이의 접촉 저항을 측정하도록 구성된 센서를 포함하는
시스템. - 제 2 항에 있어서,
각 워킹 세그먼트는 각 워킹 세그먼트의 놀이기구 차량에 대한 근접성을 검출하도록 구성된 광학 센서를 포함하는
시스템. - 제 1 항에 있어서,
각 워킹 세그먼트는 직사각형 형상으로 구성되는
시스템. - 제 1 항에 있어서,
상기 가동 서킷은 차량의 표면에 대해서 연장된 워킹 세그먼트의 상대 위치를 유지하는 속도로 회전하는
시스템. - 제 1 항에 있어서,
복수의 연장 모듈의 각각의 연장 모듈은 각 워킹 세그먼트를 연장 및 수축시키도록 구성된 액추에이터를 포함하는
시스템. - 제 1 항에 있어서,
상기 가동 서킷에 커플링되고, 각 워킹 세그먼트 위에 위치된 커버를 포함하는
시스템. - 제 1 항에 있어서,
상기 가동 서킷의 회전은 단일 평면에서 유지되는
시스템. - 제 1 항에 있어서,
각 워킹 세그먼트는 각 워킹 세그먼트의 원위 단부 상에 탄성 재료를 포함하는
시스템. - 방법에 있어서,
로딩 스테이션에 인접한 가동 서킷의 회전을 컨트롤러에 의해 작동시키는 것;
상기 컨트롤러에서, 상기 로딩 스테이션의 제 1 존에 진입하는 차량의 제 1 표시를 수신하는 것;
상기 로딩 스테이션의 제 1 존에 진입하는 차량에 응답하여 하나 이상의 대응 연장 모듈을 통해 하나 이상의 워킹 세그먼트의 연장을 컨트롤러에 의해 개시하는 것 ― 하나 이상의 대응 연장 모듈은 가동 서킷에 커플링되며, 하나 이상의 워킹 세그먼트는 차량에서 승객의 로딩 및 언로딩을 용이하게 하도록 차량의 표면에 실질적으로 접하도록 구성됨 ―;
상기 컨트롤러에서, 상기 로딩 스테이션의 제 2 존에 진입하는 차량의 제 2 표시를 수신하는 것;
상기 컨트롤러에 의해, 제 2 존에 진입하는 차량에 응답하여 하나 이상의 연장 워킹 세그먼트를 연장된 조건에서 유지하여, 하나 이상의 연장된 워킹 세그먼트가 차량과의 접촉을 실질적으로 유지하는 것;
상기 컨트롤러에서, 상기 로딩 스테이션의 제 2 존을 빠져나가는 차량의 제 3 표시를 수신하는 것; 및
상기 컨트롤러에 의해, 상기 로딩 스테이션의 제 2 존을 빠져나가는 차량에 응답하여 하나 이상의 워킹 세그먼트를 차량으로부터 멀리 수축시키는 것을 개시하여, 하나 이상의 워킹 세그먼트가 더 이상 차량에 실질적으로 접하지 않도록 하는 것을 포함하는
방법. - 제 12 항에 있어서,
하나 이상의 워킹 세그먼트의 연장은, 하나 이상의 대응 연장 모듈 상에 배치된, 스프링, 전기 액추에이터, 공압 액추에이터, 유압 액추에이터, 가요성 패들 또는 이들의 임의의 조합을 통해 수행되는
방법. - 제 12 항에 있어서,
하나 이상의 워킹 세그먼트의 연장은, 센서가 제 1 워킹 세그먼트와 차량 사이의 접촉을 검출할 때까지 하나 이상의 워킹 세그먼트의 제 1 워킹 세그먼트를 연장시키는 것을 포함하는
방법. - 제 12 항에 있어서,
상기 제 1 존 및 제 2 존으로 진입하는 차량을 검출하는 것은 광학 센서, 라이다(LIDAR) 시스템, 레이저 검출 시스템 또는 이들의 임의의 조합을 통해서 이뤄지는
방법. - 제 12 항에 있어서,
상기 하나 이상의 워킹 세그먼트의 제 1 워킹 세그먼트는 상기 하나 이상의 워킹 세그먼트의 제 2 워킹 세그먼트와 독립적으로 연장되거나, 또는 수축되거나, 또는 연장 및 수축되는
방법. - 실행될 때 프로세서로 하여금:
로딩 스테이션의 제 1 존으로 진입하는 차량을 검출하도록;
제 1 존으로 진입하는 차량에 응답하여 한 세트의 워킹 세그먼트를 연장시키도록 ― 한 세트의 워킹 세그먼트의 각각의 워킹 세그먼트는 회전 가동 서킷 상에 배치된 복수의 연장 모듈의 각 연장 모듈에 커플링되고, 한 세트의 워킹 세그먼트는 차량에서 승객을 로딩 및 언로딩하는 것을 용이하게 하도록 차량의 표면에 일치하도록 구성됨 ―;
상기 가동 서킷에 인접한 로딩 스테이션의 제 2 존으로 진입하는 차량을 검출하도록;
제 2 존에 진입하는 차량에 응답하여 한 세트의 워킹 세그먼트의 연장을 유지하도록;
제 2 존을 빠져나가는 차량을 검출하도록; 및
제 2 존을 빠져나가는 차량을 검출하는 것에 응답하여 한 세트의 워킹 세그먼트를 수축시키도록
구성되는 컴퓨터 실행가능 명령어를 포함하는
비일시적 컴퓨터 판독가능 매체. - 제 17 항에 있어서,
한 세트의 워킹 세그먼트는 상기 가동 서킷으로부터 멀리 그리고 상기 가동 서킷을 향해 측방향으로 연장 및 수축하는
비일시적 컴퓨터 판독가능 매체. - 제 17 항에 있어서,
상기 복수의 연장 모듈의 각각의 연장 모듈은 한 세트의 워킹 세그먼트를 연장 및 수축시키기 위한 액추에이터를 포함하는
비일시적 컴퓨터 판독가능 매체. - 제 17 항에 있어서,
상기 프로세서는 상기 제 1 존으로 진입하는 놀이기구 차량 사이의 시간 지연에 대응하는 사전결정된 시간 간격에서 명령의 실행을 반복하도록 구성되는
비일시적 컴퓨터 판독가능 매체.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/801,231 | 2017-11-01 | ||
| US15/801,231 US10183844B1 (en) | 2017-11-01 | 2017-11-01 | Moving walkway with segments |
| PCT/US2018/058770 WO2019089972A1 (en) | 2017-11-01 | 2018-11-01 | Moving walkway with segments |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200080282A true KR20200080282A (ko) | 2020-07-06 |
| KR102564760B1 KR102564760B1 (ko) | 2023-08-07 |
Family
ID=64362710
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207015215A Active KR102564760B1 (ko) | 2017-11-01 | 2018-11-01 | 세그먼트를 갖는 이동 워크웨이 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US10183844B1 (ko) |
| EP (1) | EP3703835B1 (ko) |
| JP (1) | JP7216725B2 (ko) |
| KR (1) | KR102564760B1 (ko) |
| CN (1) | CN111278521B (ko) |
| CA (1) | CA3079248A1 (ko) |
| ES (1) | ES2923110T3 (ko) |
| MY (1) | MY206466A (ko) |
| RU (1) | RU2020117574A (ko) |
| SG (1) | SG11202003449QA (ko) |
| WO (1) | WO2019089972A1 (ko) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10835832B2 (en) | 2019-03-31 | 2020-11-17 | Universal City Studio LLC | Gap covering systems and methods for amusement park attractions |
| US12539889B2 (en) * | 2019-08-27 | 2026-02-03 | Universal City Studios Llc | Gate systems and methods for rotating loading platform |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3865041A (en) * | 1973-04-16 | 1975-02-11 | Arrow Dev Co | Rotary platform vehicle passenger loading system |
| US5564984A (en) * | 1994-09-29 | 1996-10-15 | The Walt Disney Company | Double hull amusement ride vehicle |
| EP1437162A2 (en) * | 2000-06-16 | 2004-07-14 | Robocoaster Limited | Ride apparatus |
| US20090269175A1 (en) * | 2008-04-24 | 2009-10-29 | Disney Enterprises, Inc. | Vehicle transfer during operation of an omnimover ride |
| US20130059670A1 (en) * | 2011-09-06 | 2013-03-07 | Disney Enterprises, Inc. | Omnitable ride system |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US368420A (en) * | 1887-08-16 | Device for loading anj unloading passenger-cars at terminals | ||
| US929130A (en) * | 1908-09-21 | 1909-07-27 | Thore Helliesen | Amusement apparatus. |
| FR2064137A1 (ko) * | 1969-10-04 | 1971-07-16 | Krauss Maffei Ag | |
| US4543886A (en) * | 1983-03-09 | 1985-10-01 | Intamin Inc. | Amusement ride including a rotating loading terminal |
| AT392596B (de) * | 1989-03-21 | 1991-04-25 | Waagner Biro Ag | Vorrichtung fuer den wechsel von fahrgaesten |
| US5197923A (en) * | 1991-09-30 | 1993-03-30 | Barber Gerald L | Floating and disembarking platform |
| US5560468A (en) | 1994-10-18 | 1996-10-01 | Fujitec America, Inc. | Laterally adjustable side inserts for the steps of escalators and moving walkways pallets |
| US5558198A (en) * | 1995-09-18 | 1996-09-24 | Juarez; Ramiro O. | Band transportation system |
| NL1001785C1 (nl) | 1995-11-30 | 1996-01-24 | Arthur Van Moerkerken | Beveiligingssysteem voor roltrappen. |
| US6898816B2 (en) * | 2000-10-05 | 2005-05-31 | Fmc Technologies, Inc. | Adaptable cab floor engagement assembly for commuter and conventional jet aircraft |
| US6880301B2 (en) | 2001-03-06 | 2005-04-19 | Rite-Hite Holding Corporation | Pivotal and translational dock leveler lip |
| US9839856B2 (en) * | 2008-03-11 | 2017-12-12 | Disney Enterprises, Inc. | Method and system for providing interactivity based on sensor measurements |
| US8960097B2 (en) * | 2008-09-30 | 2015-02-24 | Disney Enterprises, Inc. | Dynamic loading system for a ride vehicle |
| US8091483B1 (en) * | 2011-03-31 | 2012-01-10 | Disney Enterprises, Inc. | Amusement park ride with underwater-controlled boats |
| US20130192761A1 (en) * | 2012-01-31 | 2013-08-01 | Joseph Yudovsky | Rotary Substrate Processing System |
-
2017
- 2017-11-01 US US15/801,231 patent/US10183844B1/en active Active
-
2018
- 2018-11-01 ES ES18804834T patent/ES2923110T3/es active Active
- 2018-11-01 RU RU2020117574A patent/RU2020117574A/ru unknown
- 2018-11-01 CN CN201880070880.6A patent/CN111278521B/zh active Active
- 2018-11-01 EP EP18804834.2A patent/EP3703835B1/en active Active
- 2018-11-01 KR KR1020207015215A patent/KR102564760B1/ko active Active
- 2018-11-01 JP JP2020524519A patent/JP7216725B2/ja active Active
- 2018-11-01 SG SG11202003449QA patent/SG11202003449QA/en unknown
- 2018-11-01 WO PCT/US2018/058770 patent/WO2019089972A1/en not_active Ceased
- 2018-11-01 MY MYPI2020002010A patent/MY206466A/en unknown
- 2018-11-01 CA CA3079248A patent/CA3079248A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3865041A (en) * | 1973-04-16 | 1975-02-11 | Arrow Dev Co | Rotary platform vehicle passenger loading system |
| US5564984A (en) * | 1994-09-29 | 1996-10-15 | The Walt Disney Company | Double hull amusement ride vehicle |
| EP1437162A2 (en) * | 2000-06-16 | 2004-07-14 | Robocoaster Limited | Ride apparatus |
| US20090269175A1 (en) * | 2008-04-24 | 2009-10-29 | Disney Enterprises, Inc. | Vehicle transfer during operation of an omnimover ride |
| US20130059670A1 (en) * | 2011-09-06 | 2013-03-07 | Disney Enterprises, Inc. | Omnitable ride system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021501728A (ja) | 2021-01-21 |
| SG11202003449QA (en) | 2020-05-28 |
| US10183844B1 (en) | 2019-01-22 |
| RU2020117574A (ru) | 2021-12-01 |
| EP3703835B1 (en) | 2022-05-04 |
| JP7216725B2 (ja) | 2023-02-01 |
| MY206466A (en) | 2024-12-18 |
| CN111278521B (zh) | 2021-10-29 |
| CA3079248A1 (en) | 2019-05-09 |
| KR102564760B1 (ko) | 2023-08-07 |
| ES2923110T3 (es) | 2022-09-23 |
| WO2019089972A1 (en) | 2019-05-09 |
| CN111278521A (zh) | 2020-06-12 |
| EP3703835A1 (en) | 2020-09-09 |
| RU2020117574A3 (ko) | 2022-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7749742B2 (ja) | 遊園地アトラクションのための隙間封鎖システム及び方法 | |
| KR20200080282A (ko) | 세그먼트를 갖는 이동 워크웨이 | |
| KR20140039275A (ko) | 자율 이동 장치 및 그 제어 방법 | |
| JP5276147B2 (ja) | 自動走行車および自動走行システム | |
| CN112947495B (zh) | 模型训练的方法、无人驾驶设备的控制方法以及装置 | |
| JP2022107500A5 (ko) | ||
| CN101370729A (zh) | 乘客输送机 | |
| GB2607130A9 (en) | Automated moving platform | |
| RU2003112696A (ru) | Способ и устройство регулирования скорости перемещения и расстояния между объектами, транспортируемыми случайным образом | |
| JP2019036192A5 (ko) | ||
| CN107438463A (zh) | 包括具有可运动地板元件的站点的游乐设施 | |
| JP2020187707A (ja) | 自律移動体 | |
| US12339670B2 (en) | Multi-traffic control method for plurality of robots performing autonomous driving | |
| US11034533B2 (en) | System for conveying articles | |
| JP2014120081A (ja) | 自動走行車および自動走行システム | |
| HK40032201B (zh) | 具有分段的移动走道 | |
| DE602005016480D1 (de) | Fahrtreppenhandlauf mit variierender Geschwindigkeit | |
| HK40032201A (en) | Moving walkway with segments | |
| KR840000423A (ko) | 동력 및 자유운반장치 | |
| US20210245011A1 (en) | Balance training system, method of controlling the same, and control program | |
| CN113879337A (zh) | 一种轨迹预测方法、装置、存储介质及电子设备 | |
| CN117075594A (zh) | 区域识别系统、区域识别方法以及计算机可读存储介质 | |
| RU2021131417A (ru) | Системы и способы блокирования зазоров для аттракционов парка развлечений | |
| CN117075593A (zh) | 区域识别系统、区域识别方法以及计算机可读存储介质 | |
| NL9301043A (nl) | Schans, uitgevoerd met een vrijdragend verplaatsbaar oppervlak. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200527 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210923 Comment text: Request for Examination of Application |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20230517 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20230803 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20230803 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |