KR20200080562A - 스포츠 코트에서의 인아웃 판정 방법 및 장치 - Google Patents
스포츠 코트에서의 인아웃 판정 방법 및 장치 Download PDFInfo
- Publication number
- KR20200080562A KR20200080562A KR1020180170151A KR20180170151A KR20200080562A KR 20200080562 A KR20200080562 A KR 20200080562A KR 1020180170151 A KR1020180170151 A KR 1020180170151A KR 20180170151 A KR20180170151 A KR 20180170151A KR 20200080562 A KR20200080562 A KR 20200080562A
- Authority
- KR
- South Korea
- Prior art keywords
- ball
- court
- determining
- shuttlecock
- inout
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0605—Decision makers and devices using detection means facilitating arbitration
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B67/00—Sporting games or accessories therefor, not provided for in groups A63B1/00 - A63B65/00
- A63B67/18—Badminton or similar games with feathered missiles
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/0017—Training appliances or apparatus for special sports for badminton
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/807—Photo cameras
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Image Analysis (AREA)
Abstract
Description
도 2는 본 발명의 일 실시예에 따라 촬영 장비가 설치된 배드민턴 코트의 개략적인 사시도이다.
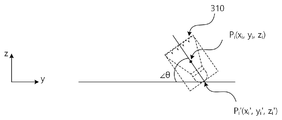
도 3은 배드민턴 코트에서 운동 중에 있는 셔틀콕을 도시하는 부분 사시도이다.
도 4는 셔틀콕이 떨어지는 모습을 촬영한 이미지를 프레임별로 나타내는 도면이다.
도 5는 셔틀콕의 운동 궤적 곡선을 도시하는 도면이다.
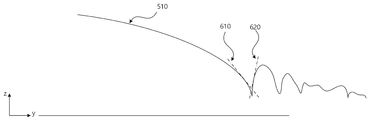
도 6은 배드민턴 코트에 떨어지기 전후의 셔틀콕의 운동 궤적 곡선을 도시하는 도면이다.
도 7은 셔틀콕이 배드민턴 코트에 접촉하는 순간의 프레임을 보여준다.
도 8은 도 7에 도시된 셔틀콕의 헤드 부분의 확대도이다.
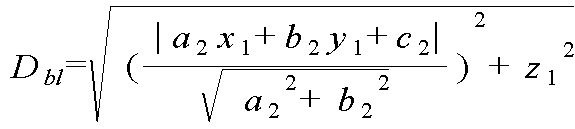
도 9는 좌표 평면 상에서 직선과 점의 거리 계산을 설명하는 도면이다.
도 10은 본 발명의 일 실시예에 따른 방법의 흐름도이다.
도 11은 본 발명의 추가적인 실시예에 따른 방법의 흐름도이다.
도 12는 본 발명의 다른 추가적인 실시예에 따른 방법의 흐름도이다.






110: 네트
120; 130: 궤적
222a; 222b: 복식용 사이드라인
224a: 224b: 단식용 사이드라인
226: 센터라인
228: 쇼트 서비스라인
232: 롱 서비스라인
234: 후방 경계 라인
252; 254: 촬영 장비
310: 레이블
410; 411; 412; 413; 414: 연결 직선
510: 운동 궤적 곡선
610; 620: 기울기
820: 셔틀콕 헤드
Claims (14)
- 구기 종목에서 볼의 인아웃을 판정하기 위한 방법으로서,
상기 구기 종목의 코트 상에서 움직이는 물체를 판정하는 단계;
움직이는 것으로 판정된 물체 중에서 해당 구기 종목에 사용되는 볼을 검출하는 단계;
상기 볼이 상기 코트의 인아웃 판정용 라인을 향해 이동하는지 여부를 판정하는 단계;
상기 볼이 상기 코트의 바닥에 떨어졌는지 여부를 판정하는 단계;
상기 볼이 상기 코트 바닥에 떨어진 것으로 판정된 경우, 상기 볼과 상기 코트 바닥의 접촉지점을 판정하는 단계를 포함하는,
인아웃 판정 방법. - 제 1 항에 있어서,
움직이는 물체를 판정하는 단계는,
촬영 장비를 통해 촬영된 프레임을 비교하는 단계;
비교된 프레임 상에서 차이가 있는 물체를 움직이는 물체로 판정하는 단계를 포함하는,
인아웃 판정 방법. - 제 1 항에 있어서,
상기 볼이 상기 코트의 인아웃 판정용 라인을 향해 이동하는지 여부를 판정하는 단계는, 상기 인아웃 판정용 라인과 상기 볼 간의 거리를 비교하는 단계를 포함하는,
인아웃 판정 방법. - 제 1 항에 있어서,
상기 볼이 상기 코트의 바닥에 떨어졌는지 여부를 판정하는 단계는,
상기 볼의 운동 궤적을 생성하는 단계;
상기 운동 궤적 상에서 순간 기울기를 순차적으로 생성하는 단계;
순차적으로 생성되는 순간 기울기를 비교하는 단계를 포함하는,
인아웃 판정 방법. - 제 4 항에 있어서,
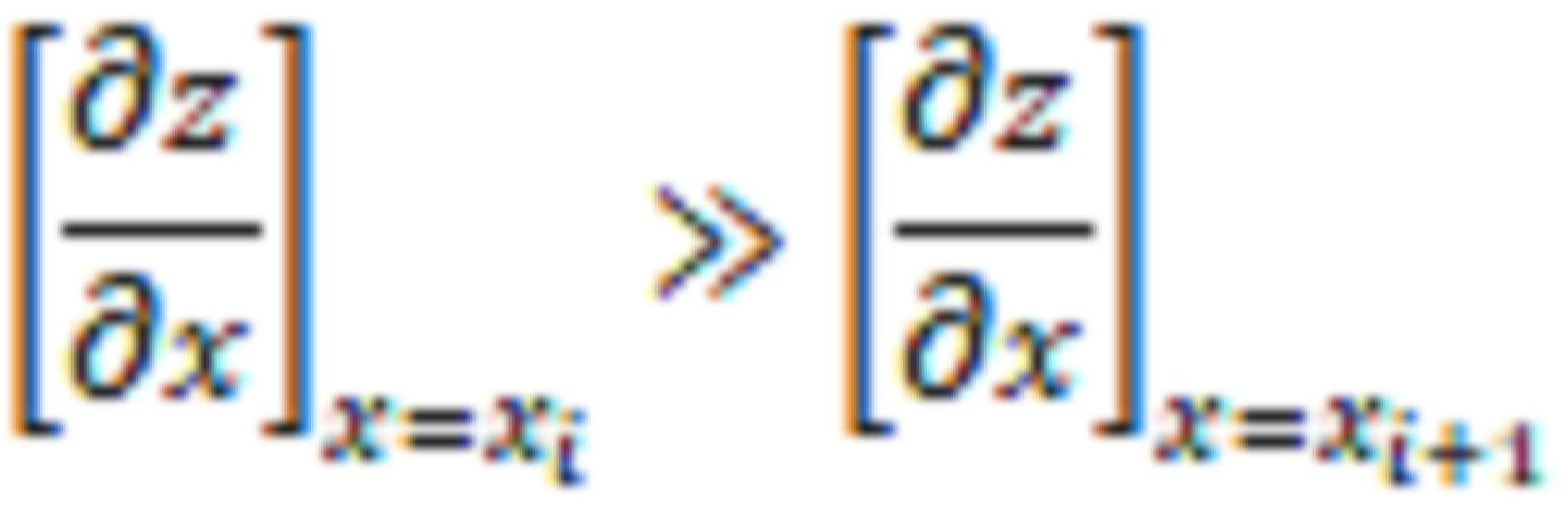
상기 볼이 상기 코트의 바닥에 떨어졌는지 여부를 판정하는 단계는, k번째 순간 기울기와 k+1번째 순간 기울기에서 미리 설정한 값을 넘어서는 변화가 발생한 경우, k번째 순간 기울기를 가지는 볼 위치에서 볼과 코트 바닥이 접촉한 것으로 판정하는 단계를 더 포함하는,
인아웃 판정 방법. - 제 5 항에 있어서,
상기 볼이 셔틀콕이고,
상기 셔틀콕과 상기 코트 바닥의 접촉지점을 판정하는 단계는, k번째 순간 기울기를 이용하여 코트 바닥에 접촉한 셔틀콕의 헤드 위치를 결정하는 단계를 포함하는,
인아웃 판정 방법. - 제 1 항에 있어서,
상기 방법이, 상기 코트 상에서 움직이는 것으로 판정된 물체에 레이블을 부여하는 단계를 더 포함하고,
해당 구기 종목에 사용되는 볼을 검출하는 단계는 미리 설정된 범위 내의 레이블 크기를 가진 물체를 검출하는 단계를 포함하는,
인아웃 판정 방법. - 컴퓨터 판독 가능한 명령어들을 포함하는 컴퓨터 판독 가능한 매체로서,
상기 명령어들은, 컴퓨터 상에서 실행될 때, 상기 컴퓨터로 하여금,
구기 종목의 코트 상에서 움직이는 물체를 판정하는 동작;
움직이는 것으로 판정된 물체 중에서 해당 구기 종목에 사용되는 볼을 검출하는 동작;
상기 볼이 상기 코트의 인아웃 판정용 라인을 향해 이동하는지 여부를 판정하는 동작;
상기 볼이 상기 코트의 바닥에 떨어졌는지 여부를 판정하는 동작;
상기 볼이 상기 코트 바닥에 떨어진 것으로 판정된 경우, 상기 볼과 상기 코트 바닥의 접촉지점을 판정하는 동작;를 포함하는 동작들을 수행하도록 하는 것인,
컴퓨터 판독 가능 매체. - 제 8 항에 있어서,
움직이는 물체를 판정하는 동작은,
촬영 장비를 통해 촬영된 프레임을 비교하는 동작;
비교된 프레임 상에서 차이가 있는 물체를 움직이는 물체로 판정하는 동작을 포함하는,
컴퓨터 판독 가능 매체. - 제 8 항에 있어서,
상기 볼이 상기 코트의 인아웃 판정용 라인을 향해 이동하는지 여부를 판정하는 동작은, 상기 인아웃 판정용 라인과 상기 볼 간의 거리를 비교하는 동작을 더 포함하는,
컴퓨터 판독 가능 매체. - 제 8 항에 있어서,
상기 볼이 상기 코트의 바닥에 떨어졌는지 여부를 판정하는 동작은,
상기 볼의 운동 궤적을 생성하는 동작;
상기 운동 궤적 상에서 순간 기울기를 순차적으로 생성하는 동작;
순차적으로 생성되는 순간 기울기를 비교하는 동작을 포함하는,
컴퓨터 판독 가능 매체. - 제 11 항에 있어서,
상기 볼이 상기 코트의 바닥에 떨어졌는지 여부를 판정하는 동작은, k번째 순간 기울기와 k+1번째 순간 기울기에서 미리 설정한 값을 넘어서는 변화가 발생한 경우, k번째 순간 기울기를 가지는 볼 위치에서 볼과 코트 바닥이 접촉한 것으로 판정하는 동작을 더 포함하는,
컴퓨터 판독 가능 매체. - 제 12 항에 있어서,
상기 볼이 셔틀콕이고,
상기 셔틀콕과 상기 코트 바닥의 접촉지점을 판정하는 동작은, k번째 순간 기울기를 이용하여 코트 바닥에 접촉한 셔틀콕의 헤드 위치를 결정하는 동작을 포함하는,
컴퓨터 판독 가능 매체. - 제 8 항에 있어서,
상기 코트 상에서 움직이는 것으로 판정된 물체에 레이블을 부여하는 동작을 더 포함하고,
해당 구기 종목에 사용되는 볼을 검출하는 동작은 미리 설정된 범위 내의 레이블을 가진 물체를 검출하는 동작을 포함하는,
컴퓨터 판독 가능 매체.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180170151A KR102144764B1 (ko) | 2018-12-27 | 2018-12-27 | 스포츠 코트에서의 인아웃 판정 방법 및 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180170151A KR102144764B1 (ko) | 2018-12-27 | 2018-12-27 | 스포츠 코트에서의 인아웃 판정 방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200080562A true KR20200080562A (ko) | 2020-07-07 |
| KR102144764B1 KR102144764B1 (ko) | 2020-08-14 |
Family
ID=71603342
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180170151A Active KR102144764B1 (ko) | 2018-12-27 | 2018-12-27 | 스포츠 코트에서의 인아웃 판정 방법 및 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102144764B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113181618A (zh) * | 2021-04-13 | 2021-07-30 | 燕山大学 | 皮带摩擦发球的羽毛球发球机及方法 |
| JPWO2022254637A1 (ko) * | 2021-06-02 | 2022-12-08 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101879368B1 (ko) * | 2016-08-23 | 2018-07-18 | 주식회사 픽셀스코프 | 구기 스포츠에서의 이벤트 영상 제공 시스템 및 이를 이용한 인/아웃 판단 방법 |
| JP2018137671A (ja) * | 2017-02-23 | 2018-08-30 | 株式会社Jvcケンウッド | 判定補助処理装置、判定補助システム、判定補助方法及び判定補助プログラム |
-
2018
- 2018-12-27 KR KR1020180170151A patent/KR102144764B1/ko active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101879368B1 (ko) * | 2016-08-23 | 2018-07-18 | 주식회사 픽셀스코프 | 구기 스포츠에서의 이벤트 영상 제공 시스템 및 이를 이용한 인/아웃 판단 방법 |
| JP2018137671A (ja) * | 2017-02-23 | 2018-08-30 | 株式会社Jvcケンウッド | 判定補助処理装置、判定補助システム、判定補助方法及び判定補助プログラム |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113181618A (zh) * | 2021-04-13 | 2021-07-30 | 燕山大学 | 皮带摩擦发球的羽毛球发球机及方法 |
| CN113181618B (zh) * | 2021-04-13 | 2022-02-11 | 燕山大学 | 皮带摩擦发球的羽毛球发球机及方法 |
| JPWO2022254637A1 (ko) * | 2021-06-02 | 2022-12-08 | ||
| WO2022254637A1 (ja) * | 2021-06-02 | 2022-12-08 | 日本電信電話株式会社 | 位置推定方法、位置推定装置およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102144764B1 (ko) | 2020-08-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102335944B1 (ko) | 스포츠 공 타격 요소의 충격 특성을 결정하는 시스템 및 방법 | |
| KR102205639B1 (ko) | 골프 공 추적 시스템 | |
| KR101048089B1 (ko) | 가상 골프 시뮬레이션 장치와, 이에 이용되는 센싱장치 및 센싱방법 | |
| CN109562289B (zh) | 球的飞行信息运算装置、球的飞行信息运算方法及记录其的计算装置可读记录介质 | |
| US11229824B2 (en) | Determining golf club head location in an image using line detection and contour separation | |
| CN108369634A (zh) | 用于监视运动场地中的对象的系统和方法 | |
| KR20130047081A (ko) | 초고속 머신 비전 카메라를 이용한 골프 시뮬레이션 시스템 및 그 시스템을 이용한 골프 시뮬레이션 방법 | |
| JP2005034619A (ja) | ゴルフクラブヘッドの挙動計測装置 | |
| KR20150116323A (ko) | 깊이 정보를 이용한 퍼팅 분석 시스템 및 방법 | |
| Liu et al. | Application of hawk-eye technology to sports events | |
| KR102144764B1 (ko) | 스포츠 코트에서의 인아웃 판정 방법 및 장치 | |
| JP2009045495A (ja) | ゴルフクラブヘッドの挙動計測装置 | |
| JP7686905B2 (ja) | 移動するボールのセンシングのため映像分析方法及びこれを利用したセンシング装置 | |
| US20250386106A1 (en) | Data Collection by a Dynamic Area of Interest Camera Technique | |
| KR102751925B1 (ko) | 다종목 스크린 스포츠 코칭용 임팩트 동작 인식 시스템 | |
| KR102836263B1 (ko) | 운동하는 공의 스핀을 파악하는 방법, 이를 이용하는 가상 골프 장치 및 가상 골프 시스템 | |
| KR102836258B1 (ko) | 운동하는 공의 스핀을 파악하는 방법, 이를 이용하는 가상 골프 장치 및 가상 골프 시스템 | |
| KR102836262B1 (ko) | 운동하는 공의 스핀을 파악하는 방법, 이를 이용하는 가상 골프 장치 및 가상 골프 시스템 | |
| US20260102673A1 (en) | Badminton intelligent training evalution system, method and non-transitory computer readable storage medium | |
| CN113856178A (zh) | 一种高尔夫球模拟器系统 | |
| KR102870958B1 (ko) | 골프 스윙 트레이닝 장치, 가상 골프 장치 및 가상 골프 시스템 | |
| US20260101119A1 (en) | Data Collection by a Dynamic Area of Interest Watcher/Closer Camera Technique | |
| US20250032880A1 (en) | Method for detecting the spin of a ball in motion, virtual golf device and virtual golf system using the same | |
| CN121868821A (zh) | 羽球智能训练评量系统、方法与存储介质 | |
| KR20200007502A (ko) | 다종목 운동정보를 이용한 스크린가상현실 운동 콘텐츠 구현 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |