KR20200083542A - 시각적 표시기 및 유체 디스펜서 - Google Patents
시각적 표시기 및 유체 디스펜서 Download PDFInfo
- Publication number
- KR20200083542A KR20200083542A KR1020207015516A KR20207015516A KR20200083542A KR 20200083542 A KR20200083542 A KR 20200083542A KR 1020207015516 A KR1020207015516 A KR 1020207015516A KR 20207015516 A KR20207015516 A KR 20207015516A KR 20200083542 A KR20200083542 A KR 20200083542A
- Authority
- KR
- South Korea
- Prior art keywords
- fluid
- display
- electrode
- electrodes
- fluids
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000012530 fluid Substances 0.000 title claims abstract description 279
- 230000000007 visual effect Effects 0.000 title description 10
- 238000000034 method Methods 0.000 claims abstract description 61
- 230000033001 locomotion Effects 0.000 claims abstract description 53
- 230000005684 electric field Effects 0.000 claims abstract description 20
- 230000004913 activation Effects 0.000 claims abstract description 17
- 230000008569 process Effects 0.000 claims abstract description 15
- 239000007788 liquid Substances 0.000 claims description 127
- 239000000243 solution Substances 0.000 description 55
- 238000013461 design Methods 0.000 description 54
- 238000010586 diagram Methods 0.000 description 47
- 238000006073 displacement reaction Methods 0.000 description 44
- 239000007789 gas Substances 0.000 description 31
- 238000004364 calculation method Methods 0.000 description 30
- 230000006870 function Effects 0.000 description 29
- 230000000694 effects Effects 0.000 description 27
- 239000010410 layer Substances 0.000 description 24
- 239000000463 material Substances 0.000 description 24
- 210000000707 wrist Anatomy 0.000 description 24
- 230000007246 mechanism Effects 0.000 description 22
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 17
- 229940079593 drug Drugs 0.000 description 14
- 239000003814 drug Substances 0.000 description 14
- NOESYZHRGYRDHS-UHFFFAOYSA-N insulin Chemical compound N1C(=O)C(NC(=O)C(CCC(N)=O)NC(=O)C(CCC(O)=O)NC(=O)C(C(C)C)NC(=O)C(NC(=O)CN)C(C)CC)CSSCC(C(NC(CO)C(=O)NC(CC(C)C)C(=O)NC(CC=2C=CC(O)=CC=2)C(=O)NC(CCC(N)=O)C(=O)NC(CC(C)C)C(=O)NC(CCC(O)=O)C(=O)NC(CC(N)=O)C(=O)NC(CC=2C=CC(O)=CC=2)C(=O)NC(CSSCC(NC(=O)C(C(C)C)NC(=O)C(CC(C)C)NC(=O)C(CC=2C=CC(O)=CC=2)NC(=O)C(CC(C)C)NC(=O)C(C)NC(=O)C(CCC(O)=O)NC(=O)C(C(C)C)NC(=O)C(CC(C)C)NC(=O)C(CC=2NC=NC=2)NC(=O)C(CO)NC(=O)CNC2=O)C(=O)NCC(=O)NC(CCC(O)=O)C(=O)NC(CCCNC(N)=N)C(=O)NCC(=O)NC(CC=3C=CC=CC=3)C(=O)NC(CC=3C=CC=CC=3)C(=O)NC(CC=3C=CC(O)=CC=3)C(=O)NC(C(C)O)C(=O)N3C(CCC3)C(=O)NC(CCCCN)C(=O)NC(C)C(O)=O)C(=O)NC(CC(N)=O)C(O)=O)=O)NC(=O)C(C(C)CC)NC(=O)C(CO)NC(=O)C(C(C)O)NC(=O)C1CSSCC2NC(=O)C(CC(C)C)NC(=O)C(NC(=O)C(CCC(N)=O)NC(=O)C(CC(N)=O)NC(=O)C(NC(=O)C(N)CC=1C=CC=CC=1)C(C)C)CC1=CN=CN1 NOESYZHRGYRDHS-UHFFFAOYSA-N 0.000 description 14
- 239000012528 membrane Substances 0.000 description 13
- 239000011248 coating agent Substances 0.000 description 12
- 238000000576 coating method Methods 0.000 description 12
- 238000001514 detection method Methods 0.000 description 12
- 239000011521 glass Substances 0.000 description 12
- 230000008859 change Effects 0.000 description 10
- 230000006835 compression Effects 0.000 description 10
- 238000007906 compression Methods 0.000 description 10
- 230000006837 decompression Effects 0.000 description 10
- 230000004048 modification Effects 0.000 description 10
- 238000012986 modification Methods 0.000 description 10
- 230000000750 progressive effect Effects 0.000 description 9
- 230000009471 action Effects 0.000 description 8
- 230000001419 dependent effect Effects 0.000 description 8
- 230000010354 integration Effects 0.000 description 8
- 239000004033 plastic Substances 0.000 description 8
- 229920003023 plastic Polymers 0.000 description 8
- 102000004877 Insulin Human genes 0.000 description 7
- 108090001061 Insulin Proteins 0.000 description 7
- 230000008901 benefit Effects 0.000 description 7
- 239000003990 capacitor Substances 0.000 description 7
- 238000005265 energy consumption Methods 0.000 description 7
- 229940125396 insulin Drugs 0.000 description 7
- 230000001939 inductive effect Effects 0.000 description 6
- 229910052751 metal Inorganic materials 0.000 description 6
- 239000002184 metal Substances 0.000 description 6
- 229910052594 sapphire Inorganic materials 0.000 description 6
- 239000010980 sapphire Substances 0.000 description 6
- 238000007789 sealing Methods 0.000 description 6
- 229920002545 silicone oil Polymers 0.000 description 6
- 239000000758 substrate Substances 0.000 description 6
- 230000007613 environmental effect Effects 0.000 description 5
- QSHDDOUJBYECFT-UHFFFAOYSA-N mercury Chemical compound [Hg] QSHDDOUJBYECFT-UHFFFAOYSA-N 0.000 description 5
- 239000000203 mixture Substances 0.000 description 5
- 239000003921 oil Substances 0.000 description 5
- 239000002304 perfume Substances 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 238000005096 rolling process Methods 0.000 description 5
- 239000004809 Teflon Substances 0.000 description 4
- 229920006362 Teflon® Polymers 0.000 description 4
- 238000011156 evaluation Methods 0.000 description 4
- 238000002347 injection Methods 0.000 description 4
- 239000007924 injection Substances 0.000 description 4
- 229910052753 mercury Inorganic materials 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- PEDCQBHIVMGVHV-UHFFFAOYSA-N Glycerine Chemical compound OCC(O)CO PEDCQBHIVMGVHV-UHFFFAOYSA-N 0.000 description 3
- 230000006399 behavior Effects 0.000 description 3
- 238000009835 boiling Methods 0.000 description 3
- 239000003086 colorant Substances 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 238000001647 drug administration Methods 0.000 description 3
- 229920001971 elastomer Polymers 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 239000001307 helium Substances 0.000 description 3
- 229910052734 helium Inorganic materials 0.000 description 3
- SWQJXJOGLNCZEY-UHFFFAOYSA-N helium atom Chemical compound [He] SWQJXJOGLNCZEY-UHFFFAOYSA-N 0.000 description 3
- 229920000642 polymer Polymers 0.000 description 3
- 229920001296 polysiloxane Polymers 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 239000000126 substance Substances 0.000 description 3
- 239000004094 surface-active agent Substances 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- UONOETXJSWQNOL-UHFFFAOYSA-N tungsten carbide Chemical compound [W+]#[C-] UONOETXJSWQNOL-UHFFFAOYSA-N 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- QGZKDVFQNNGYKY-UHFFFAOYSA-N Ammonia Chemical compound N QGZKDVFQNNGYKY-UHFFFAOYSA-N 0.000 description 2
- RTZKZFJDLAIYFH-UHFFFAOYSA-N Diethyl ether Chemical compound CCOCC RTZKZFJDLAIYFH-UHFFFAOYSA-N 0.000 description 2
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 2
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 description 2
- IMNFDUFMRHMDMM-UHFFFAOYSA-N N-Heptane Chemical compound CCCCCCC IMNFDUFMRHMDMM-UHFFFAOYSA-N 0.000 description 2
- ATUOYWHBWRKTHZ-UHFFFAOYSA-N Propane Chemical compound CCC ATUOYWHBWRKTHZ-UHFFFAOYSA-N 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 2
- 238000004026 adhesive bonding Methods 0.000 description 2
- 125000000129 anionic group Chemical group 0.000 description 2
- 238000000231 atomic layer deposition Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 239000008280 blood Substances 0.000 description 2
- 210000004369 blood Anatomy 0.000 description 2
- 239000002775 capsule Substances 0.000 description 2
- 125000002091 cationic group Chemical group 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- NEHMKBQYUWJMIP-UHFFFAOYSA-N chloromethane Chemical compound ClC NEHMKBQYUWJMIP-UHFFFAOYSA-N 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 239000003989 dielectric material Substances 0.000 description 2
- 238000009792 diffusion process Methods 0.000 description 2
- 239000004811 fluoropolymer Substances 0.000 description 2
- 229920002313 fluoropolymer Polymers 0.000 description 2
- 230000004927 fusion Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- JEGUKCSWCFPDGT-UHFFFAOYSA-N h2o hydrate Chemical compound O.O JEGUKCSWCFPDGT-UHFFFAOYSA-N 0.000 description 2
- 230000002209 hydrophobic effect Effects 0.000 description 2
- 230000005661 hydrophobic surface Effects 0.000 description 2
- 238000001802 infusion Methods 0.000 description 2
- 238000009413 insulation Methods 0.000 description 2
- 229910052744 lithium Inorganic materials 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000008018 melting Effects 0.000 description 2
- 238000002844 melting Methods 0.000 description 2
- 230000005499 meniscus Effects 0.000 description 2
- 230000000877 morphologic effect Effects 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 230000005501 phase interface Effects 0.000 description 2
- 238000005240 physical vapour deposition Methods 0.000 description 2
- 238000000623 plasma-assisted chemical vapour deposition Methods 0.000 description 2
- 230000037452 priming Effects 0.000 description 2
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 2
- SBEQWOXEGHQIMW-UHFFFAOYSA-N silicon Chemical compound [Si].[Si] SBEQWOXEGHQIMW-UHFFFAOYSA-N 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- NDVLTYZPCACLMA-UHFFFAOYSA-N silver oxide Chemical compound [O-2].[Ag+].[Ag+] NDVLTYZPCACLMA-UHFFFAOYSA-N 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 238000004381 surface treatment Methods 0.000 description 2
- 230000002459 sustained effect Effects 0.000 description 2
- 239000004753 textile Substances 0.000 description 2
- 238000007740 vapor deposition Methods 0.000 description 2
- HEZMWWAKWCSUCB-PHDIDXHHSA-N (3R,4R)-3,4-dihydroxycyclohexa-1,5-diene-1-carboxylic acid Chemical compound O[C@@H]1C=CC(C(O)=O)=C[C@H]1O HEZMWWAKWCSUCB-PHDIDXHHSA-N 0.000 description 1
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 241000238366 Cephalopoda Species 0.000 description 1
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 208000032365 Electromagnetic interference Diseases 0.000 description 1
- 241000283070 Equus zebra Species 0.000 description 1
- VGGSQFUCUMXWEO-UHFFFAOYSA-N Ethene Chemical compound C=C VGGSQFUCUMXWEO-UHFFFAOYSA-N 0.000 description 1
- 229910001374 Invar Inorganic materials 0.000 description 1
- 241000761555 Lamania Species 0.000 description 1
- PWHULOQIROXLJO-UHFFFAOYSA-N Manganese Chemical compound [Mn] PWHULOQIROXLJO-UHFFFAOYSA-N 0.000 description 1
- 241001481166 Nautilus Species 0.000 description 1
- 235000014676 Phragmites communis Nutrition 0.000 description 1
- 241000287531 Psittacidae Species 0.000 description 1
- 238000003848 UV Light-Curing Methods 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000002745 absorbent Effects 0.000 description 1
- 239000002250 absorbent Substances 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 150000001335 aliphatic alkanes Chemical group 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 229910021529 ammonia Inorganic materials 0.000 description 1
- 210000003423 ankle Anatomy 0.000 description 1
- 238000007743 anodising Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000036760 body temperature Effects 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- 239000011651 chromium Substances 0.000 description 1
- 239000012230 colorless oil Substances 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 238000001723 curing Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000007598 dipping method Methods 0.000 description 1
- 238000004090 dissolution Methods 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000010292 electrical insulation Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000004049 embossing Methods 0.000 description 1
- 238000004146 energy storage Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 238000011049 filling Methods 0.000 description 1
- 229920002457 flexible plastic Polymers 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 238000011010 flushing procedure Methods 0.000 description 1
- 235000013305 food Nutrition 0.000 description 1
- 230000008014 freezing Effects 0.000 description 1
- 238000007710 freezing Methods 0.000 description 1
- 238000010230 functional analysis Methods 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 210000004247 hand Anatomy 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000001794 hormone therapy Methods 0.000 description 1
- AMGQUBHHOARCQH-UHFFFAOYSA-N indium;oxotin Chemical compound [In].[Sn]=O AMGQUBHHOARCQH-UHFFFAOYSA-N 0.000 description 1
- 239000011810 insulating material Substances 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 239000006210 lotion Substances 0.000 description 1
- 229920001684 low density polyethylene Polymers 0.000 description 1
- 239000004702 low-density polyethylene Substances 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 229910052748 manganese Inorganic materials 0.000 description 1
- 239000011572 manganese Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 229940050176 methyl chloride Drugs 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 229910001000 nickel titanium Inorganic materials 0.000 description 1
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 1
- 239000012454 non-polar solvent Substances 0.000 description 1
- 238000010943 off-gassing Methods 0.000 description 1
- 239000002674 ointment Substances 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 239000011368 organic material Substances 0.000 description 1
- 239000005022 packaging material Substances 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 230000002572 peristaltic effect Effects 0.000 description 1
- -1 pharmaceutical Substances 0.000 description 1
- 239000000049 pigment Substances 0.000 description 1
- 239000002798 polar solvent Substances 0.000 description 1
- 229920003229 poly(methyl methacrylate) Polymers 0.000 description 1
- 239000004926 polymethyl methacrylate Substances 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 239000001294 propane Substances 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 239000002096 quantum dot Substances 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000012858 resilient material Substances 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000009958 sewing Methods 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 150000004756 silanes Chemical class 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 229910001923 silver oxide Inorganic materials 0.000 description 1
- 239000002356 single layer Substances 0.000 description 1
- 230000005586 smoking cessation Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000004528 spin coating Methods 0.000 description 1
- 238000005507 spraying Methods 0.000 description 1
- 238000003892 spreading Methods 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 238000001029 thermal curing Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 238000007514 turning Methods 0.000 description 1
- 235000012431 wafers Nutrition 0.000 description 1
- 238000009736 wetting Methods 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images

















































































































































Classifications
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C17/00—Indicating the time optically by electric means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/004—Optical devices or arrangements for the control of light using movable or deformable optical elements based on a displacement or a deformation of a fluid
- G02B26/005—Optical devices or arrangements for the control of light using movable or deformable optical elements based on a displacement or a deformation of a fluid based on electrowetting
-
- G—PHYSICS
- G04—HOROLOGY
- G04G—ELECTRONIC TIME-PIECES
- G04G9/00—Visual time or date indication means
- G04G9/02—Visual time or date indication means by selecting desired characters out of a number of characters or by selecting indicating elements the position of which represent the time, e.g. by using multiplexing techniques
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Electrochromic Elements, Electrophoresis, Or Variable Reflection Or Absorption Elements (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
- Devices For Indicating Variable Information By Combining Individual Elements (AREA)
Abstract
Description
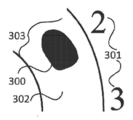
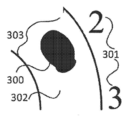
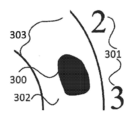
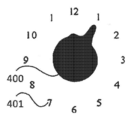
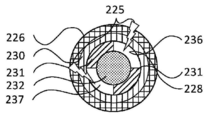
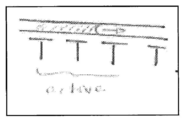
도 2는 종래 기술의 제2 표시기의 평면도.
도 3은 본 발명의 제1 실시예의 측단면도.
도 4a는 본 발명의 제2 실시예의 사시도.
도 4b는 본 발명의 제2 실시예의 제2 사시도.
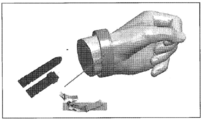
도 5a는 약물 디스펜서로서 사용된, 본 발명의 제2 실시예를 도시하는 도면.
도 5b는 도 5a의 실시예에서 사용하기 위한 카트리지의 측면도.
도 5c는 구부러진 상태로 도시된, 도 5a의 실시예에서 사용하기 위한 카트리지의 사시도.
도 6은 하나의 저장기를 가지는, 본 발명의 유체 변위 장치의 부분적으로 분해된 도면.
도 7은 본 발명을 초기화하는데 도움이 되는 특징들을 보여주는, 본 발명의 저장기 및 변위 부재의 단면도.
도 8a 내지 도 8e는 도 8f의 기계적 실시예의 상이한 작동 스테이지들의 진행성 도면(progressive view)들.
도 8f는 본 발명의 완전히 기계적인 구현예의 단면 측면도.
도 9는 직물 적용예(textile application)들을 위한 본 발명의 일 실시예의 개략도.
도 10a 및 도 10b는 전기습윤 효과를 겪는 액적의 사진들을 나란히 도시하는 것으로, 도 10a는 전극에 전압이 인가된 액적을 도시하는 것이고, 도 10b는 전극에 전압이 인가되지 않은 액적을 도시하는 도면.
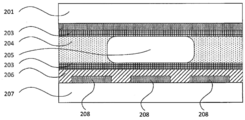
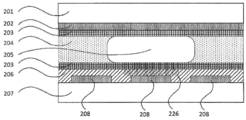
도 11은 전기습윤 디스플레이의 개략 단면도.
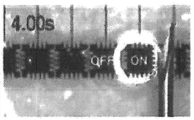
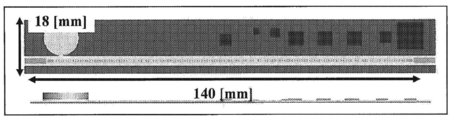
도 12a 내지 도 12d는 전극 피치가 1㎜이고, 높이가 400㎛인 실리콘 오일에서의 물의 액적의 변위를 보여주는 시간 순서(time sequence) 사진들을 도시하는 도면.
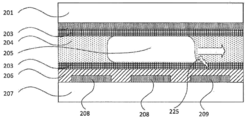
도 13은 전기습윤 디스플레이의 개략 단면도.
도 14는 표면 거동 변화를 포함하는 인접한 전극이 활성화되는 것을 도시하는 단면도.
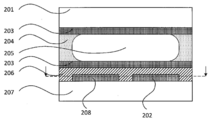
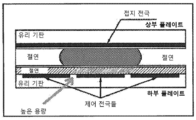
도 15는 모든 전극들이 형성되는 하부 플레이트의 구조를 갖는 전기습윤 디스플레이의 개략 단면도.
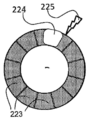
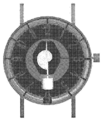
도 16은 채널 모양과 제어 전극들의 구조를 보여주는 도 15의 평면도.
도 17은 하부 플레이트 상에 모든 전극들이 구성된 전기습윤 디스플레이의 개략 단면도.
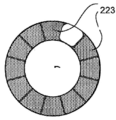
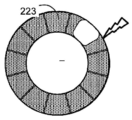
도 18은 전극들 구조를 보여주는 도 17의 평면도.
도 19a 내지 도 19f는 제어 전극들 활성화에 따른 액적의 변위를 보여주는 진행성 개략 도면들.
도 19g 내지 도 19n은 제어 전극들 활성화에 따른 액적의 변위를 보여주는 진행성 개략 도면들.
도 20a 및 도 20b는 제어 전극 활성화에 따른 액적 변형을 보여주는 진행성 개략 도면들.
도 20c 내지 도 20q는 도 20a와 도 20b에 상세하게 나타낸 액적 변형의 순차적인 도면들.
도 21은 투명한 디스플레이 아래의 상호교환 가능한 표시의 조립의 진행성 도면들.
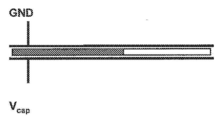
도 22는 전체 튜브에 걸친 아날로그 센서의 대안적인 일 실시예의 단면도.
도 23은 전기습윤 디스플레이에서 구현된, 본 발명의 디지털 센서의 대안적인 일 구현예의 단면도.
도 24a 내지 도 24c는 하나의 제어 전극으로 구성된 전기습윤 디스플레이에서의 액적 변형의 애니메이션(animation)을 보여주는 진행성 개략 도면들.
도 25a 내지 도 25g는 전기습윤 디스플레이에서의 여러 액적들을 모으는 방법을 보여주는 진행성 개략 도면들.
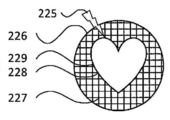
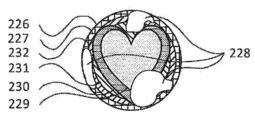
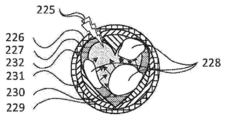
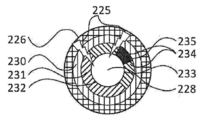
도 26a 내지 도 26f는 다른 유체의 섹션은 닫힌, 유체 액적을 구체화하기 위한 방법을 보여주는 진행성 개략 도면들.
도 27a 내지 도 27e는 2개의 유체 액적들로 유체 액적을 분리하는 방법을 보여주는 진행성 개략 도면들.
도 28a 내지 도 28d는 본 발명의 요소들의 고려되는 요구 조건을 보여주는 표들.
도 29a는 도 3에서와 같은, 본 발명의 제1 실시예의 개략적인 측단면도.
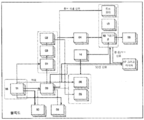
도 29b는 도 29a에 도시된 실시예에 관련된 블록도.
도 29c는 본 발명의 예비 설계의 블록도.
도 30a는 본 발명의 또 다른 블록도.
도 30b는 제1 국면(phase)의 모든 액추에이터들의 또 다른 블록도.
도 30c는 국면 1의 기능도.
도 31a는 국면 인터페이스들에 대한 선택적인 솔루션(optional solution)들을 도시하는 도면.
도 31b는 국면들 인터페이스, 액체의 변위 및 액체 위치 함수들의 탐지를 고려하는 표.
도 31c는 상이한 액체들에 관한 증기압 대 온도를 보여주는 그림.
도 31d는 본 발명의 액체의 변위에 관한 대안적인 수단의 블록도.
도 32a 내지 도 32d는 액체의 변위에 관한 솔루션들을 고려하는 표.
도 33은 액체 변위 시스템들에 관한 평가 기준을 논의하는 표.
도 34는 액체의 변위에 관한 솔루션들의 순위(ranking)를 논의하는 표.
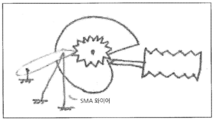
도 35는 본 발명의 나선 휠을 작동시키는 SMA(Shape-Memory Alloy) 깔쭉톱니바퀴를 도시하는 도면.
도 36a 및 도 36b는 본 발명의 전기습윤에 의해 움직인 유체의 개략도들.
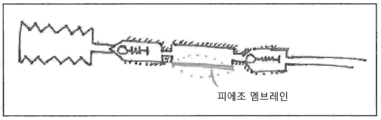
도 37은 본 발명의 피에조 멤브레인(piezo membrane) 펌프의 개략도.
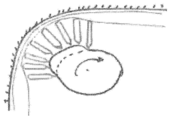
도 38은 본 발명의 원형 연동 펌프의 개략도.
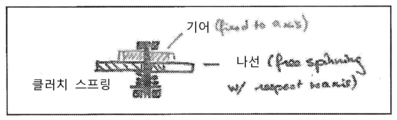
도 39a 및 도 39b는 디스플레이의 수동 설정을 허용하기 위한 클러치의 가능한 구현예를 갖는, 나선 휠 설계의 도식 표현들.
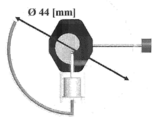
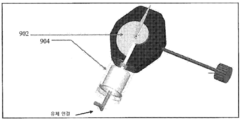
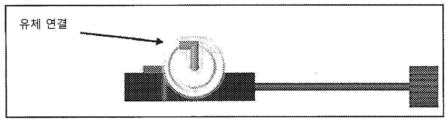
도 40은 Debiotech에 의해 설계된, 본 발명의 장치인 나노펌프(Nanopump)의 사시도.
도 41은 본 발명의 전자기 멤브레인 펌프의 개략도.
도 42a 및 도 42b는 전기습윤 효과의 사진들로서, 도 42a는 전압이 인가되지 않은 것을 보여주는 도면이고, 도 42b는 전압이 인가된 것을 보여주는 도면.
도 43은 전기습윤 디스플레이의 단면의 개략도.
도 44는 전극 피치가 1[㎜]이고, 높이가 400[㎛]인 전극을 갖는 실리콘 오일에서의 물의 액적(droplet)의 연속되는 변위를 도시하는 도면.
도 45는 하나의 액적에서만 변위를 유도하는, 액체 기둥을 갖는 본 발명의 표시기를 가지는 실시예를 도시하는 도면.
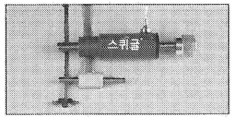
도 46은 본 발명의 스퀴글 드라이브(Squiggle drive)의 평면도.
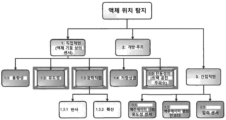
도 47은 표시기 액체 위치의 탐지를 위한 솔루션 제안들을 도시하는 도면.
도 48은 액체 위치의 탐지를 위한 솔루션들을 논의하는 표.
도 49는 액체 감지 방법들에 관한 평가 기준을 논의하는 표.
도 50은 액체 레벨 센서들의 선택된 솔루션들의 순위를 논의하는 표.
도 51a 및 도 51b는 전기습윤 디스플레이 상의 아날로그 센서 또는 디지털 센서로서의 용량성 센서의 2가지 상이한 구현예들을 도시하는 도면들.
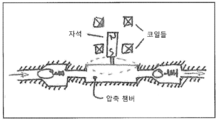
도 52는 본 발명의 유도성 센서의 개략도.
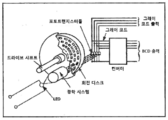
도 53a는 본 발명의 인코더 시스템의 개략도.
도 53b는 절대적 위치선정을 위한 본 발명의 인코더 휠의 또 다른 개략도.
도 54는 튜브에서의 액체 길이에 미치는 온도의 효과의 그래프.
도 55는 튜브에서의 액체 길이에 미치는 온도의 효과의 또 다른 그래프.
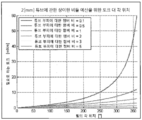
도 56은 물에 용해된 헬륨을 고려하는, 상이한 입력 파라미터들에 관한 계산 기포 반경들/튜브 반경 비의 그래프.
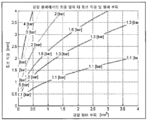
도 57은 감압 챔버 대 튜브 직경 및 챔버 부피에서의 최종 압력의 그래프.
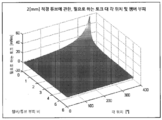
도 58은 감압 챔버 대 챔버 부피 및 튜브 직경에서의 최종 압력의 윤곽선 도면(contour plot).
도 59는 피스톤 상의 최대 힘 대 튜브 직경, 챔버 부피 및 피스톤 직경의 등위 표면(isosurface)들의 3D 그래프.
도 60은 피스톤 스트로크(piston stroke) 대 튜브 직경 및 피스톤 직경의 도면.
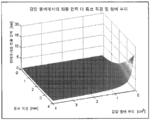
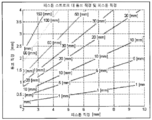
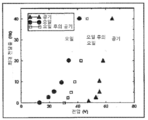
도 61은 11[㎽] 평균 전력 소모(최대 용납 가능한 전력) 미만, 그리고 3[㎽] 미만인 함수(function)를 허용하는 구성예들을 예시하는 그래프(30% 전체 효율을 고려하는).
도 62는 액체-진공 인터페이스의 개략도.
도 63은 실리콘-실리콘 인터페이스에 관한 리턴 시간(return time) 등위 표면들의 그래프.
도 64는 물-물 인터페이스에 관한 리턴 시간 등위 표면들의 그래프.
도 65는 나선 모양의 경사로(ramp)에 작용하는 힘들을 도시하는 개략도.
도 66은 튼튼한 압축 챔버를 갖는 일반화된 나선 시스템.
도 67은 아르키메데스 나선(archimedean spiral)을 도시하는 도면.
도 68은 2[㎜] 튜브에 관한 튜브 부피 비에 대한 요구되는 토크 대 각 위치 및 챔버를 나타내는 곡선을 도시하는 도면.
도 69는 2[㎜] 튜브 직경에 관한, 상이한 챔버/튜브 부피 비들에 관한 토크 대 각 위치의 상이한 비율들의 그래프.
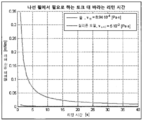
도 70은 물과 실리콘 오일에 관한, 나선 휠 대 원하는 리턴 시간에 대한 요구된 토크의 그래프.
도 71은 전기습윤 권리의 개략 단면도와 등가 전기 개략도.
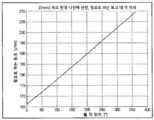
도 72는 전압의 함수로서, 상이한 매체에서의 물의 변위 주파수의 그래프.
도 73은 글로벌 조합(global combination)들뿐만 아니라, 선택적인 솔루션들의 요약(summary)을 나타내는 형태학상 상자(morphologic box)들을 도시하는 도면.
도 74는 본 발명의 실시예의 변위 장치들의 5개의 상이한 옵션(option)들의 표.
도 75는 실시예 1의 파라미터들 - 나선 캠(spiral cam) - 을 논의하는 표.
도 76은 본 발명의 시계 무브먼트의 사진들.
도 77은 본 발명에서 사용 가능한 규격품 무브먼트(off-the-shelf movement)들의 사진들.
도 78a는 디지털 수정 발진식 시계의 개략도.
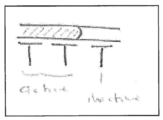
도 78b는 기계식 시계의 개략도.
도 79는 리턴 스프링 힘과 저장기 두께 대 저장기 직경의 그래프.
도 80a는 편평하고 표시기 튜브 및 시계 무브먼트가 있는 실시예(1)의 평면도.
도 80b는 편평한, 실시예 1의 측면도.
도 80c는 편평한, 실시예 1의 정면도.
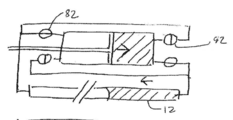
도 81은 편평한, 실시예 1의 저장기를 통한 단면이 취해진 단면도.
도 82는 편평한, 실시예 1의 캠 휠의 사시도.
도 83a는 긴 저장기를 갖는 실시예 1의 평면도.
도 83b는 긴 저장기를 갖는 실시예 1을 통한 단면의 측면도.
도 84는 시계에서 패키징된, 실시예 1의 평면도.
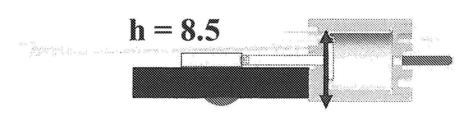
도 85는 도 84의 시계의 메커니즘을 통한 단면도.
도 86a는 디스플레이 마스크가 없는, 선형 디스플레이를 갖는 실시예 1의 평면도.
도 86b는 디스플레이 마스크가 있는, 선형 디스플레이를 갖는 실시예 1의 평면도.
도 86c는 본 발명의 선형 디스플레이가 있는 실시예 1의 측면도.
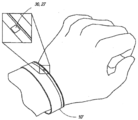
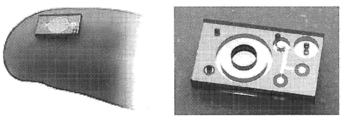
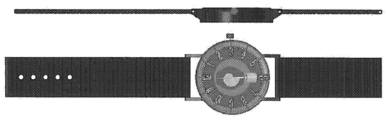
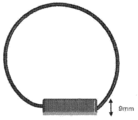
도 87은 본 발명의 구부러지기 쉬운 플라스틱 팔찌를 도시하는 도면.
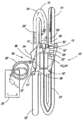
도 88은 구부러지기 쉬운 팔찌에서의 나선 무브먼트의 구현예를 사시도와 측면도로 나란히 나타낸 도면.
도 89는 손목 아래의 메커니즘이 있는, S자 형상의 디스플레이의 선택적인 구현예를 도시하는 도면.
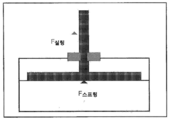
도 90은 본 발명의 피스톤에 작용하는 힘들의 개략도.
도 91은 2[㎜]의 내부 직경 휠, 4.5[㎜]의 스트로크에 관한 토크 대 각 위치의 그래프.
도 92는 토크들을 논의하는 표.
도 93은 본 발명의 3개의 플립-플롭(flip-flop) 기반의 드라이버의 개략도.
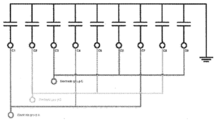
도 94는 본 발명의 전극들의 연결의 개략도.
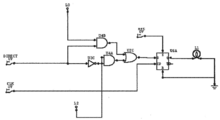
도 95는 본 발명의 간략화된 감지 회로의 개략도.
도 96은 본 발명의 구동 전자 장치들의 더 완전한 개략도.
도 97은 도 96의 시스템을 구동하기 위해 요구되는 구성요소들을 열거하는 표.
도 98은 본 발명의 전기습윤 디스플레이 시계의 일 실시예의 평면도 및 측면도.
도 99a 내지 도 99e는 저비용의 전기 또는 고급(high-end) 기계적 무브먼트의 통합의 개략도들.
도 100a 내지 도 100d는 본 발명의 조립 단계들의 도면들.
도 101a 내지 도 101f는 실시예 1의 도면들과 본 발명의 시계에서의 원형 유체 채널의 통합을 도시하는 도면.
도 102a 내지 도 102c는 실시예 1의 가변적인 디스플레이 변형예들과 채널 모양들을 도시하는 도면들.
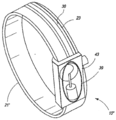
도 103a 내지 도 103h는 실시예 2의 사시도들과 본 발명의 탄성이 있는 팔찌에서의 통합(integration)을 도시하는 도면.
도 104는 실시예 2의 일 변형예의 사시도.
도 105는 실시예 2의 또 다른 변형예의 평면도.
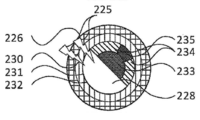
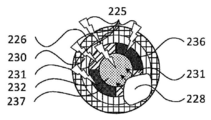
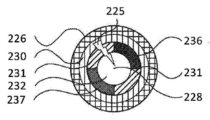
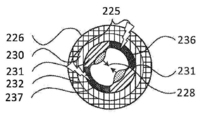
도 106a 내지 도 106f는 실시예 3의 사시도들과 본 발명의 "S" 디스플레이에서의 통합을 도시하는 도면.
도 107은 실시예 3의 일 변형예의 사시도.
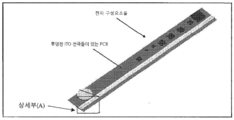
도 108은 본 발명의 투명한 ITO 전극들과 전가 구성요소들을 갖는 PCB의 사시도.
도 109a는 본 발명의 감지 전극들의 도 108의 상세한 사시도 A.
도 109b는 본 발명의 구동 전극들의 도 108의 상세한 사시도 A.
도 110은 전기습윤의 개략도.
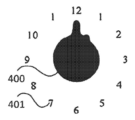
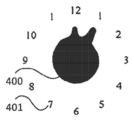
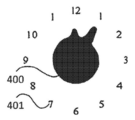
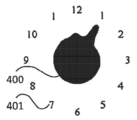
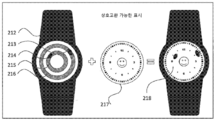
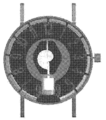
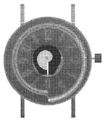
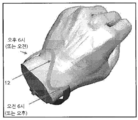
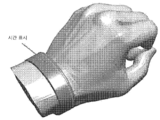
도 111은 전기습윤에 기초한 본 발명의 팔찌에서의 시간의 표시의 사시도.
도 112는 도 111의 시간 표시를 상세하게 나타낸 사시도.
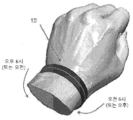
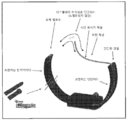
도 113은 본 발명의 팔찌에 관한 폐쇄하는 장치들의 사시도.
당업자라면 도면들에서의 요소들이 간략화 및 명확화를 위해 예시되고 반드시 실제 크기대로 그려지지는 않았음을 알게 될 것이다. 예를 들면, 본 발명과 본 발명의 실시예들의 이해를 향상시키는 것에 도움이 되기 위해 다른 요소들에 대해 치수들이 과장될 수 있다. 또, "제1", "제2" 등이 본 명세서에서 사용될 때, 그것들의 사용은 유사한 요소들 사이에서 구별하기 위해 의도되고 반드시 순차적이거나 연대기적인 순서를 묘사하기 위한 것은 아니다. 또한, 상세한 설명부 및/또는 청구항들에서의 "앞(front)", "뒤(back)", "위(top)", "아래(bottom)" 등과 같은 상대적 용어들은 반드시 배타적인 상대적 위치를 묘사하기 위해서 사용되는 것은 아니다. 그러므로 당업자라면 그러한 용어들이 다른 용어들과 서로 교환 가능할 수 있고 본 명세서에서 묘사된 실시예들은 명백히 예시되거나 달리 기술된 것들 외의 다른 오리엔테이션(orientation)들에서 작동할 수 있다는 것을 이해할 것이다.


















| 층 | 재료 | 두께 | 유전 상수 |
| 절연 | 패럴린 C | 800[㎚] | 3.152 |


| ID | 요소 | 평균 소비(Mean consumption) |
| 1 | 용량성 감시 칩 | 5[㎁] |
| 2 | 마이크로컨트롤러 | 0.5[㎂] |
| 3 | 스텝-업(Step-up) | 7[㎂] |
| 4 | 디스플레이 | 무시할 수 있음 |
| 총합 | 0.5[㎂] |
Claims (36)
- 유체를 포함하는 유체 디스플레이용 장치에 있어서,
상기 제2 제어 전극의 상기 전기적 활성화(electric activation)가 상기 제2 제어 전극의 방향으로 상기 유체의 변형 또는 이동을 발생시키도록, 상기 유체는 전기습윤 프로세스(electrowetting process)에 의해 변위되고(displaced), 상기 장치는 적어도 2개의 섞일 수 없는(immiscible) 유체들로 채워지는데 반해, 하나의 유체는 기준 전극(reference electrode)과 제어 전극에 의해 발생되는 상기 전기장 내에 위치하고 동일한 기준 전극과 적어도 하나의 제2 제어 전극에 의해 발생되는 상기 전기장 내에 부분적으로 위치하는, 유체를 포함하는 유체 디스플레이용 장치. - 제1 항에 있어서,
상기 변위되는 유체는 액체의 적어도 하나의 액적(droplet)인, 유체를 포함하는 유체 디스플레이용 장치. - 제1 항에 있어서,
상기 유체들은 투명하거나 반투명하거나 불투명한, 유체를 포함하는 유체 디스플레이용 장치. - 제1 항에 있어서,
상기 유체들은 애니메이션(animation)을 보여주는, 유체를 포함하는 유체 디스플레이용 장치. - 제1 항에 있어서,
상기 유체들은 측정된 값을 나타내기 위해 표시(indicia)를 따라 이동하는, 유체를 포함하는 유체 디스플레이용 장치. - 제1 항에 있어서,
상기 기준 전극은 나누어지지 않거나 여러 부분들로 나누어지는, 유체를 포함하는 유체 디스플레이용 장치. - 제1 항에 있어서,
상기 기준 전극은 상기 유체들과 직접 전기 접촉하거나 상기 유체들로부터 격리되는, 유체를 포함하는 유체 디스플레이용 장치. - 제1 항에 있어서,
상기 제어 전극들은 유전층(dielectric layer)에 의해 상기 유체들로부터 격리되는, 유체를 포함하는 유체 디스플레이용 장치. - 제1 항에 있어서,
상기 기준 전극은 상기 제어 전극들의 상기 표면 반대쪽에 위치하고/위치하거나 상기 제어 전극들의 상기 표면에 인접하게 위치하는, 유체를 포함하는 유체 디스플레이용 장치. - 상기 유체의 일부가 상기 장치 내에서 변위되도록 제1 항에 따른 장치의 상기 제어 전극들을 순서대로(in a sequence) 스위칭하는 방법.
- 제10 항에 있어서,
상기 제어 전극들은 AC 전압 또는 DC 전압에 의해 활성화되는, 스위칭하는 방법. - 상기 제어 전극들에 대한 상기 유체의 상기 위치가 탐지되도록 제1 항에 따른 장치의 상기 제어 전극들에 전력을 순서대로 공급하는 방법.
- 제5 항에 따른 장치를 포함하는 장치로서,
모든 전극들은 투명하고 상기 전극들 밑에 상기 표시가 놓이는, 장치. - 제13 항에 있어서,
상기 사용자가 상기 사용자의 장치를 커스터마이즈(customize)하기 위해 상호 교환 가능한 표시(interchangeable indicia)가 제공되는, 장치. - 제1 항 내지 제14 항 중 어느 한 항에 따른 장치를 포함하는 시계(timepiece)로서,
상기 측정된 값은 시간인, 시계. - 제1 항에 있어서,
상기 제2 제어 전극의 상기 전기적 활성화가 상기 제2 제어 전극의 상기 방향으로 상기 유체의 변형 또는 이동을 발생시키도록 적어도 2개의 섞일 수 없는 유체들로 채워지는데 반해, 하나의 유체는 기준 전극과 제어 전극에 의해 발생되는 상기 전기장 내에 위치하고 동일한 기준 전극과 적어도 하나의 제2 제어 전극에 의해 발생되는 상기 전기장 내에 부분적으로 위치하는, 유체를 포함하는 유체 디스플레이용 장치. - 제16 항에 있어서,
상기 변위되는 유체는 액체의 적어도 하나의 액적인, 유체를 포함하는 유체 디스플레이용 장치. - 제16 항에 있어서,
상기 유체들은 투명하거나 반투명하거나 불투명한, 유체를 포함하는 유체 디스플레이용 장치. - 제16 항에 있어서,
상기 유체들은 애니메이션을 보여주는, 유체를 포함하는 유체 디스플레이용 장치. - 제16 항에 있어서,
상기 유체들은 측정된 값을 나타내기 위해 표시를 따라 이동하는, 유체를 포함하는 유체 디스플레이용 장치. - 제17 항에 있어서,
상기 기준 전극은 나누어지지 않거나 여러 부분들로 나누어지는, 유체를 포함하는 유체 디스플레이용 장치. - 제17 항에 있어서,
상기 기준 전극은 상기 유체들과 직접 전기 접촉하거나 상기 유체들로부터 격리되는, 유체를 포함하는 유체 디스플레이용 장치. - 제17 항에 있어서,
상기 제어 전극들은 유전층에 의해 상기 유체들로부터 격리되는, 유체를 포함하는 유체 디스플레이용 장치. - 제17 항에 있어서,
상기 기준 전극은 상기 제어 전극들의 상기 표면 반대쪽에 위치하고/위치하거나 상기 제어 전극들의 상기 표면에 인접하게 위치하는, 유체를 포함하는 유체 디스플레이용 장치. - 상기 유체의 일부가 상기 장치 내에서 변위되도록 제17 항에 따른 장치의 상기 제어 전극들을 순서대로 스위칭하는 방법.
- 제25 항에 있어서,
상기 제어 전극들은 AC 또는 DC 전압에 의해 활성화되는, 제어 전극들을 스위칭하는 방법. - 상기 제어 전극들에 대한 상기 유체의 상기 위치가 탐지되도록 제17 항에 따른 표시기의 상기 제어 전극들에 전력을 순서대로 공급하는 방법.
- 제21 항에 따른 장치를 포함하는 장치로서,
모든 전극들은 투명하고 상기 전극들 밑에 상기 표시가 놓이는, 장치. - 제28 항에 있어서,
상기 사용자가 상기 사용자의 장치를 커스터마이즈하기 위해 상호 교환 가능한 표시가 제공되는, 장치. - 제1 항 내지 제29 항 중 어느 한 항에 따른 장치를 포함하는 시계로서,
상기 측정된 값은 시간인, 시계. - 측정된 값을 표시하거나 심미적 모양(aesthetic shape)을 생성하는 유체를 포함하는 장치에 있어서,
상기 제2 제어 전극의 상기 전기적 활성화가 상기 제2 제어 전극의 상기 방향으로 상기 유체의 변형 또는 이동을 발생시키도록 상기 유체는 전기습윤 프로세스에 의해 변위되고, 상기 장치는 적어도 2개의 섞일 수 없는 유체들로 채워지는데 반해 하나의 유체는 기준 전극과 제어 전극에 의해 발생되는 상기 전기장 내에 위치하고 동일한 기준 전극과 적어도 하나의 제2 제어 전극에 의해 발생되는 상기 전기장 내에 부분적으로 위치하고, 선택적으로(optionally) 적어도 하나의 제어 전극은 .01㎜보다 큰 사이즈를 가지고 사람의 눈에 의해 보여지기에 충분하게 매우 큰, 측정된 값을 표시하거나 심미적 모양을 생성하는 유체를 포함하는 장치. - 제19 항에 있어서,
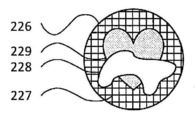
심미적 모양을 나타내기 위해 설계되는 적어도 하나의 제어 전극이 존재하는, 측정된 값을 표시하거나 심미적 모양을 생성하는 유체를 포함하는 장치. - 제32 항에 있어서,
상기 유체 액적들을 모아서 그것들을 상기 제어 전극들이 상기 심미적 모양을 형성하는 영역으로 안내하는 역할을 하는 제어 전극들이 존재하는, 측정된 값을 표시하거나 심미적 모양을 생성하는 유체를 포함하는 장치. - 다른 유체의 적어도 하나의 폐쇄된 섹션(closed section)을 얻기 위해 상기 유체가 변형되도록 제33 항에 따른 장치의 상기 제어 전극들을 스위칭하는 방법.
- 상기 유체 액적이 2개 이상의 액적들로 분리되도록 제34 항에 따른 표시기의 상기 제어 전극들을 스위칭하는 방법.
- 유체를 포함하는 유체 디스플레이용 장치에 있어서,
상기 유체는 전기습윤 프로세스에 의해 변위되고, 상기 장치는 적어도 2개의 섞일 수 없는 유체들로 채워지는데 반해 하나의 유체는 제어 전극에 의해 발생되는 전기장에 의해 활성화되고 상기 전극의 활성화는 상기 유체들 중 적어도 하나의 변형 또는 이동을 발생시키는, 유체를 포함하는 유체 디스플레이용 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762579235P | 2017-10-31 | 2017-10-31 | |
| US62/579,235 | 2017-10-31 | ||
| PCT/IB2018/058549 WO2019087104A2 (en) | 2017-10-31 | 2018-10-31 | Visual indicator and fluid dispenser |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200083542A true KR20200083542A (ko) | 2020-07-08 |
| KR102699751B1 KR102699751B1 (ko) | 2024-08-27 |
Family
ID=64572397
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207015516A Active KR102699751B1 (ko) | 2017-10-31 | 2018-10-31 | 시각적 표시기 및 유체 디스펜서 |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP3704549A2 (ko) |
| JP (1) | JP2021501371A (ko) |
| KR (1) | KR102699751B1 (ko) |
| CN (1) | CN111480124A (ko) |
| CH (1) | CH715656B9 (ko) |
| WO (1) | WO2019087104A2 (ko) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11507027B2 (en) | 2019-02-25 | 2022-11-22 | Daniel Grupp | Illuminated time-passage indicator |
| CN114071813B (zh) * | 2022-01-18 | 2022-03-18 | 中国空气动力研究与发展中心超高速空气动力研究所 | 一种高压多重电极装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3486109A (en) * | 1966-08-04 | 1969-12-23 | Centre Electron Horloger | Indicating device for low energy electric signals,comprising conducting liquids |
| JP2005510347A (ja) * | 2001-11-26 | 2005-04-21 | ケック グラデュエイト インスティテュート | 化学、生化学、および生物学的アッセイ等のためにエレクトロウェッティングを介してマイクロ流体制御する方法、装置、および物 |
| US20080297880A1 (en) * | 2004-07-09 | 2008-12-04 | The University Of Cincinnati | Display Capable Electrowetting Light Valve |
| US20090219789A1 (en) * | 2004-12-15 | 2009-09-03 | Meadows Michael E | Linear Fluid Timepiece |
| US20120147713A1 (en) * | 2009-08-21 | 2012-06-14 | Lucien Vouillamoz | Fluid indicator |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3783598A (en) | 1972-10-26 | 1974-01-08 | E Parr | Instrument for indicating time |
| US5050612A (en) | 1989-09-12 | 1991-09-24 | Matsumura Kenneth N | Device for computer-assisted monitoring of the body |
| JP2004521389A (ja) * | 2001-06-05 | 2004-07-15 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 減衰全反射に基づく表示装置 |
| WO2005067786A1 (en) | 2004-01-15 | 2005-07-28 | Glucon Inc. | Wearable glucometer |
| GB0407233D0 (en) * | 2004-03-30 | 2004-05-05 | Koninkl Philips Electronics Nv | Compact switchable optical unit |
| EP1780615A1 (fr) * | 2005-10-28 | 2007-05-02 | Montres Rado S.A. | Ensemble d'affichage à effets décoratifs pour un instrument portable, tel qu'une montre |
| WO2008155926A1 (ja) * | 2007-06-19 | 2008-12-24 | Sharp Kabushiki Kaisha | 表示素子、及びこれを用いた電気機器 |
| CN101452114B (zh) * | 2007-11-28 | 2010-08-11 | 财团法人工业技术研究院 | 电润湿式显示器装置 |
| CH701440A2 (fr) * | 2009-07-03 | 2011-01-14 | Comme Le Temps Sa | Montre-bracelet à écran tactile et procédé d'affichage sur une montre à écran tactile. |
| CN103229098B (zh) * | 2010-09-22 | 2016-08-10 | 积水化学工业株式会社 | 电湿润显示器 |
| CN103592759B (zh) * | 2013-11-26 | 2015-09-09 | 上海交通大学 | 基于电润湿效应驱动液滴移动的显示器件 |
| US9835848B2 (en) * | 2014-12-22 | 2017-12-05 | Amazon Technologies, Inc. | Electrowetting display device with stable display states |
-
2018
- 2018-10-31 CN CN201880070586.5A patent/CN111480124A/zh active Pending
- 2018-10-31 CH CH000498/2020A patent/CH715656B9/fr unknown
- 2018-10-31 JP JP2020524168A patent/JP2021501371A/ja active Pending
- 2018-10-31 KR KR1020207015516A patent/KR102699751B1/ko active Active
- 2018-10-31 WO PCT/IB2018/058549 patent/WO2019087104A2/en not_active Ceased
- 2018-10-31 EP EP18812257.6A patent/EP3704549A2/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3486109A (en) * | 1966-08-04 | 1969-12-23 | Centre Electron Horloger | Indicating device for low energy electric signals,comprising conducting liquids |
| JP2005510347A (ja) * | 2001-11-26 | 2005-04-21 | ケック グラデュエイト インスティテュート | 化学、生化学、および生物学的アッセイ等のためにエレクトロウェッティングを介してマイクロ流体制御する方法、装置、および物 |
| US20080297880A1 (en) * | 2004-07-09 | 2008-12-04 | The University Of Cincinnati | Display Capable Electrowetting Light Valve |
| US20090219789A1 (en) * | 2004-12-15 | 2009-09-03 | Meadows Michael E | Linear Fluid Timepiece |
| US20120147713A1 (en) * | 2009-08-21 | 2012-06-14 | Lucien Vouillamoz | Fluid indicator |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3704549A2 (en) | 2020-09-09 |
| WO2019087104A3 (en) | 2019-06-20 |
| CH715656B9 (fr) | 2023-06-30 |
| JP2021501371A (ja) | 2021-01-14 |
| KR102699751B1 (ko) | 2024-08-27 |
| WO2019087104A2 (en) | 2019-05-09 |
| CN111480124A (zh) | 2020-07-31 |
| CH715656B1 (fr) | 2023-01-31 |
| WO2019087104A4 (en) | 2019-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3528060A1 (en) | Visual indicator | |
| AU2007322061B2 (en) | Variable flow infusion pumps system | |
| EP1513580B1 (en) | Plunger assembly for patient infusion device | |
| US8529553B2 (en) | Infusion medium delivery device and method with drive device for driving plunger in reservoir | |
| US20030229310A1 (en) | Plunger assembly for patient infusion device | |
| US20040078028A1 (en) | Plunger assembly for patient infusion device | |
| EP3525841B1 (en) | Micro delivery device | |
| KR102699751B1 (ko) | 시각적 표시기 및 유체 디스펜서 | |
| US12578684B2 (en) | Visual indicator and fluid dispenser | |
| AU2019100552A4 (en) | Micro delivery device | |
| Yi | A remotely powered electrolytic actuator with dose control for implantable drug delivery | |
| Evans | Valve regulated implantable intrathecal drug delivery for chronic pain management |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200529 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210511 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20230518 Patent event code: PE09021S01D |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Final Notice of Reason for Refusal Patent event date: 20240125 Patent event code: PE09021S02D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20240530 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20240823 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20240823 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |