KR20200084446A - 전자 장치 및 그의 제어 방법 - Google Patents
전자 장치 및 그의 제어 방법 Download PDFInfo
- Publication number
- KR20200084446A KR20200084446A KR1020180169855A KR20180169855A KR20200084446A KR 20200084446 A KR20200084446 A KR 20200084446A KR 1020180169855 A KR1020180169855 A KR 1020180169855A KR 20180169855 A KR20180169855 A KR 20180169855A KR 20200084446 A KR20200084446 A KR 20200084446A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- road
- electronic device
- road segment
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/40—Control within particular dimensions
- G05D1/43—Control of position or course in two dimensions [2D]
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3815—Road data
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/243—Means capturing signals occurring naturally from the environment, e.g. ambient optical, acoustic, gravitational or magnetic signals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/06—Direction of travel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Business, Economics & Management (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
Abstract
본 개시의 차량의 주행을 제어하는 전자 장치는 센서, 통신부 및 차량의 목적지를 설정하기 위한 사용자 입력이 수신되면, 센서에 의해 획득된 차량의 위치 정보와 목적지에 대한 정보를 통신부를 통해 외부 전자 장치로 전송하고, 지도 정보가 도로의 분기점에 기초하여 구분된 복수의 도로 세그먼트 중에서, 차량의 위치부터 차량의 목적지까지의 경로에 존재하는 도로에 대응되는 적어도 하나의 도로 세그먼트를 외부 전자 장치로부터 통신부를 통해 수신하고, 수신된 도로 세그먼트에 기초하여 차량의 주행을 제어하는 프로세서를 포함한다.
Description
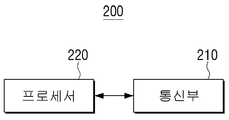
도 2는 본 개시의 일 실시 예에 따른 외부 전자 장치의 블록도이다.
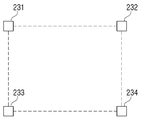
도 2a는 본 개시의 일 실시 예에 따른 도로 세그먼트를 생성하는 방법을 설명하기 위한 도면이다.
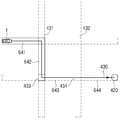
도 2b는 본 개시의 일 실시 예에 따른 도로 세그먼트를 생성하는 방법을 설명하기 위한 도면이다.
도 2c는 본 개시의 일 실시 예에 따른 도로 세그먼트를 생성하는 방법을 설명하기 위한 도면이다.
도 2d는 본 개시의 일 실시 예에 따른 도로 세그먼트를 생성하는 방법을 설명하기 위한 도면이다.
도 2e는 본 개시의 일 실시 예에 따른 도로 세그먼트를 생성하는 방법을 설명하기 위한 도면이다.
도 3은 본 개시의 일 실시 예에 따른 전자 장치의 블록도이다.
도 4는 본 개시의 일 실시 예에 따른 도로 세그먼트를 수신하는 방법을 설명하기 위한 도면이다.
도 5는 본 개시의 일 실시 예에 따른 도로 세그먼트를 수신하는 방법을 설명하기 위한 도면이다.
도 6은 본 개시의 일 실시 예에 따른 도로 세그먼트를 수신하는 방법을 설명하기 위한 도면이다.
도 7은 본 개시의 일 실시 예에 따른 도로 세그먼트를 수신하는 방법을 설명하기 위한 도면이다.
도 8은 본 개시의 일 실시 예에 따른 전자 장치의 세부 구성을 상세히 도시한 블록도이다.
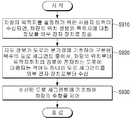
도 9는 본 개시의 일 실시 예에 따른 흐름도를 설명하기 위한 도면이다.
200: 외부 전자 장치
Claims (18)
- 차량의 주행을 제어하는 전자 장치에 있어서,
센서;
통신부; 및
상기 차량의 목적지를 설정하기 위한 사용자 입력이 수신되면, 상기 센서에 의해 획득된 상기 차량의 위치 정보와 상기 목적지에 대한 정보를 상기 통신부를 통해 외부 전자 장치로 전송하고,
지도 정보가 도로의 분기점에 기초하여 구분된 복수의 도로 세그먼트 중에서, 상기 차량의 위치부터 상기 차량의 목적지까지의 경로에 존재하는 도로에 대응되는 적어도 하나의 도로 세그먼트를 상기 외부 전자 장치로부터 상기 통신부를 통해 수신하고,
상기 수신된 도로 세그먼트에 기초하여 상기 차량의 주행을 제어하는 프로세서;를 포함하는 전자 장치. - 제1항에 있어서,
상기 지도 정보는,
상기 지도 정보를 생성하기 위한 차량이 도로를 주행하는 동안에 상기 차량에 구비된 센서에 의해 획득된 정보에 기초하여 생성되는, 전자 장치. - 제1항에 있어서,
상기 프로세서는,
상기 수신된 도로 세그먼트 중에서, 상기 센서에 의해 획득된 상기 차량의 위치 정보에 대응되는 도로 세그먼트에 기초하여 상기 차량의 주행을 제어하는, 전자 장치. - 제1항에 있어서,
상기 프로세서는,
상기 경로에 존재하는 도로에 대응되는 복수의 도로 세그먼트가 있는 경우, 상기 복수의 도로 세그먼트 전체를 상기 외부 전자 장치로부터 수신하는, 전자 장치. - 제1항에 있어서,
상기 프로세서는,
상기 경로에 존재하는 도로에 대응되는 복수의 도로 세그먼트가 있는 경우, 상기 차량의 위치 정보에 기초하여 상기 복수의 도로 세그먼트 중 일부의 도로 세그먼트를 상기 외부 전자 장치로부터 수신하고, 상기 수신된 도로 세그먼트에 기초하여 상기 차량이 주행하는 동안에 나머지 도로 세그먼트를 상기 외부 전자 장치로부터 수신하는, 전자 장치. - 제5항에 있어서,
상기 프로세서는,
상기 수신된 도로 세그먼트에 기초하여 상기 차량이 주행하는 동안에 상기 센서에 의해 획득된 상기 차량의 위치 정보를 상기 외부 전자 장치로 전송하고, 상기 차량의 위치 정보에 기초하여 상기 나머지 도로 세그먼트를 상기 외부 전자 장치로부터 수신하는, 전자 장치. - 제1항에 있어서,
상기 프로세서는,
상기 경로에 존재하는 도로에 분기점이 있는 경우, 상기 경로에 존재하는 도로에 대응되는 복수의 세그먼트 및 상기 경로에 존재하지 않지만 상기 분기점에 연결된 도로에 대응되는 적어도 하나의 도로 세그먼트를 상기 외부 전자 장치로부터 수신하는, 전자 장치. - 제7항에 있어서,
상기 분기점에 연결된 도로에 대응되는 적어도 하나의 도로 세그먼트는,
상기 분기점에 연결된 도로 중에서, 상기 분기점부터 상기 경로에 존재하지 않는 다음 분기점까지의 도로에 대응되는 도로 세그먼트인, 전자 장치. - 제1항에 있어서,
상기 복수의 도로 세그먼트 각각은, 두 개의 분기점 사이에서 차량의 주행 방향에 기초하여 생성된 제1 도로 세그먼트 및 제2 도로 세그먼트를 포함하고,
상기 프로세서는,
상기 제1 도로 세그먼트 및 제2 도로 세그먼트 중에서, 상기 경로를 따라 상기 차량이 이동되는 방향에 기초하여 결정된 상기 적어도 하나의 세그먼트를 상기 외부 전자 장치로부터 수신하는, 전자 장치. - 차량의 주행을 제어하는 제어 방법에 있어서,
상기 차량의 목적지를 설정하기 위한 사용자 입력이 수신되면, 상기 차량의 위치 정보와 상기 목적지에 대한 정보를 외부 전자 장치로 전송하는 단계;
지도 정보가 도로의 분기점에 기초하여 구분된 복수의 도로 세그먼트 중에서, 상기 차량의 위치부터 상기 차량의 목적지까지의 경로에 존재하는 도로에 대응되는 적어도 하나의 도로 세그먼트를 상기 외부 전자 장치로부터 수신하는 단계; 및
상기 수신된 도로 세그먼트에 기초하여 상기 차량의 주행을 제어하는 단계;를 포함하는 제어 방법. - 제10항에 있어서,
상기 지도 정보는,
상기 지도 정보를 생성하기 위한 차량이 도로를 주행하는 동안에 상기 차량에 구비된 센서에 의해 획득된 정보에 기초하여 생성되는, 제어 방법. - 제10항에 있어서,
상기 제어하는 단계는,
상기 수신된 도로 세그먼트 중에서, 상기 차량의 위치 정보에 대응되는 도로 세그먼트에 기초하여 상기 차량의 주행을 제어하는, 제어 방법. - 제10항에 있어서,
상기 수신하는 단계는,
상기 경로에 존재하는 도로에 대응되는 복수의 도로 세그먼트가 있는 경우, 상기 복수의 도로 세그먼트 전체를 상기 외부 전자 장치로부터 수신하는, 제어 방법. - 제10항에 있어서,
상기 수신하는 단계는,
상기 경로에 존재하는 도로에 대응되는 복수의 도로 세그먼트가 있는 경우, 상기 차량의 위치 정보에 기초하여 상기 복수의 도로 세그먼트 중 일부의 도로 세그먼트를 상기 외부 전자 장치로부터 수신하고, 상기 수신된 도로 세그먼트에 기초하여 상기 차량이 주행하는 동안에 나머지 도로 세그먼트를 상기 외부 전자 장치로부터 수신하는, 제어 방법. - 제14항에 있어서,
상기 수신하는 단계는,
상기 수신된 도로 세그먼트에 기초하여 상기 차량이 주행하는 동안에 상기 차량의 위치 정보를 상기 외부 전자 장치로 전송하고, 상기 차량의 위치 정보에 기초하여 상기 나머지 도로 세그먼트를 상기 외부 전자 장치로부터 수신하는, 제어 방법. - 제10항에 있어서,
상기 수신하는 단계는,
상기 경로에 존재하는 도로에 분기점이 있는 경우, 상기 경로에 존재하는 도로에 대응되는 복수의 세그먼트 및 상기 경로에 존재하지 않지만 상기 분기점에 연결된 도로에 대응되는 적어도 하나의 도로 세그먼트를 상기 외부 전자 장치로부터 수신하는, 제어 방법. - 제16항에 있어서,
상기 분기점에 연결된 도로에 대응되는 적어도 하나의 도로 세그먼트는,
상기 분기점에 연결된 도로 중에서, 상기 분기점부터 상기 경로에 존재하지 않는 다음 분기점까지의 도로에 대응되는 도로 세그먼트인, 제어 방법. - 제10항에 있어서,
상기 복수의 도로 세그먼트 각각은, 두 개의 분기점 사이에서 차량의 주행 방향에 기초하여 생성된 제1 도로 세그먼트 및 제2 도로 세그먼트를 포함하고,
상기 수신하는 단계는,
상기 제1 도로 세그먼트 및 제2 도로 세그먼트 중에서, 상기 경로를 따라 상기 차량이 이동되는 방향에 기초하여 결정된 상기 적어도 하나의 세그먼트를 상기 외부 전자 장치로부터 수신하는, 제어 방법.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180169855A KR20200084446A (ko) | 2018-12-26 | 2018-12-26 | 전자 장치 및 그의 제어 방법 |
| US17/417,314 US20220075387A1 (en) | 2018-12-26 | 2019-12-09 | Electronic device and control method thereof |
| PCT/KR2019/017318 WO2020138760A1 (ko) | 2018-12-26 | 2019-12-09 | 전자 장치 및 그의 제어 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180169855A KR20200084446A (ko) | 2018-12-26 | 2018-12-26 | 전자 장치 및 그의 제어 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200084446A true KR20200084446A (ko) | 2020-07-13 |
Family
ID=71126096
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180169855A Ceased KR20200084446A (ko) | 2018-12-26 | 2018-12-26 | 전자 장치 및 그의 제어 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20220075387A1 (ko) |
| KR (1) | KR20200084446A (ko) |
| WO (1) | WO2020138760A1 (ko) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11781875B2 (en) * | 2019-08-21 | 2023-10-10 | Toyota Motor Engineering & Manufacturing North America, Inc. | Apparatus and method for forming and analyzing connected roads |
| US12169129B2 (en) * | 2020-02-05 | 2024-12-17 | Lg Electronics Inc. | Route provision apparatus and route provision method therefor |
| CN114323060B (zh) * | 2021-12-24 | 2024-05-17 | 阿波罗智联(北京)科技有限公司 | 距离确定方法及装置 |
| US12270655B2 (en) * | 2022-07-07 | 2025-04-08 | Gm Cruise Holdings Llc | Estimating road grade for inertial measurement unit calibration in an unmapped environment |
| CN115027483B (zh) * | 2022-07-29 | 2023-04-07 | 北京四维图新科技股份有限公司 | 叠置道路识别、车辆行驶控制方法、装置及设备 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6707421B1 (en) * | 1997-08-19 | 2004-03-16 | Siemens Vdo Automotive Corporation | Driver information system |
| DE69819337T2 (de) * | 1997-08-19 | 2004-07-22 | Siemens Vdo Automotive Corp., Auburn Hills | Fahrzeuginformationssystem |
| JP4746794B2 (ja) * | 2001-08-21 | 2011-08-10 | クラリオン株式会社 | カーナビゲーション装置、カーナビゲーション用制御プログラムを記録した記録媒体 |
| US8126642B2 (en) * | 2008-10-24 | 2012-02-28 | Gray & Company, Inc. | Control and systems for autonomously driven vehicles |
| GB0822893D0 (en) * | 2008-12-16 | 2009-01-21 | Tele Atlas Bv | Advanced speed profiles - Further updates |
| WO2010081540A1 (en) * | 2009-01-14 | 2010-07-22 | Tomtom International B.V. | Improvements relating to navigation apparatus used in-vehicle |
| WO2011079869A1 (en) * | 2009-12-30 | 2011-07-07 | Tomtom International B.V. | Collecting driving conditions from navigation devices |
| US9096267B2 (en) * | 2013-01-21 | 2015-08-04 | GM Global Technology Operations LLC | Efficient data flow algorithms for autonomous lane changing, passing and overtaking behaviors |
| US20150345967A1 (en) * | 2014-06-03 | 2015-12-03 | Nissan North America, Inc. | Probabilistic autonomous vehicle routing and navigation |
| GB201421442D0 (en) * | 2014-12-02 | 2015-01-14 | Tomtom Int Bv | Method and apparatus for providing point of interest information |
| GB201421441D0 (en) * | 2014-12-02 | 2015-01-14 | Tomtom Int Bv | Method and apparatus for providing point of interest information |
| US9978284B2 (en) * | 2015-06-05 | 2018-05-22 | Here Global B.V. | Method and apparatus for generating vehicle maneuver plans |
| KR101724887B1 (ko) * | 2015-08-10 | 2017-04-07 | 현대자동차주식회사 | 전방 도로 형상과 연결을 분석해 차선 변경과 타이밍을 결정하는 자율주행 제어 장치 및 방법 |
| KR102237559B1 (ko) * | 2015-12-09 | 2021-04-07 | 현대자동차주식회사 | 고정밀 지도의 제공을 위한 세그먼트 모델링 기반의 도로의 형상 정보 생성 방법 |
| US10710603B2 (en) * | 2016-10-19 | 2020-07-14 | Here Global B.V. | Segment activity planning based on route characteristics |
| KR20180087968A (ko) * | 2017-01-26 | 2018-08-03 | 한국전자통신연구원 | 자율 주행 장치 및 그 방법 |
| US11067995B2 (en) * | 2017-03-20 | 2021-07-20 | Mobileye Vision Technologies Ltd. | Navigation by augmented path prediction |
-
2018
- 2018-12-26 KR KR1020180169855A patent/KR20200084446A/ko not_active Ceased
-
2019
- 2019-12-09 US US17/417,314 patent/US20220075387A1/en not_active Abandoned
- 2019-12-09 WO PCT/KR2019/017318 patent/WO2020138760A1/ko not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| US20220075387A1 (en) | 2022-03-10 |
| WO2020138760A1 (ko) | 2020-07-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102211299B1 (ko) | 곡선 투영을 가속화하기 위한 시스템 및 방법 | |
| EP3324332B1 (en) | Method and system to predict vehicle traffic behavior for autonomous vehicles to make driving decisions | |
| US10816984B2 (en) | Automatic data labelling for autonomous driving vehicles | |
| JP7210165B2 (ja) | 仮想経路を表示する方法、装置及びディスプレイ装置 | |
| US12164030B2 (en) | Local sensing based autonomous navigation, and associated systems and methods | |
| KR102279078B1 (ko) | 자율 주행 차량의 v2x 통신 기반의 차량 차로 시스템 | |
| US10816992B2 (en) | Method for transforming 2D bounding boxes of objects into 3D positions for autonomous driving vehicles (ADVs) | |
| US10262234B2 (en) | Automatically collecting training data for object recognition with 3D lidar and localization | |
| US10520319B2 (en) | Data driven map updating system for autonomous driving vehicles | |
| US11545033B2 (en) | Evaluation framework for predicted trajectories in autonomous driving vehicle traffic prediction | |
| US11230297B2 (en) | Pedestrian probability prediction system for autonomous vehicles | |
| US11079492B1 (en) | Condition dependent parameters for large-scale localization and/or mapping | |
| US11248925B2 (en) | Augmented road line detection and display system | |
| CN110390240B (zh) | 自动驾驶车辆中的车道后处理 | |
| US20200026282A1 (en) | Lane/object detection and tracking perception system for autonomous vehicles | |
| CN112740134A (zh) | 电子装置和电子装置的车辆控制方法、服务器和提供服务器的精确地图数据的方法 | |
| US10782411B2 (en) | Vehicle pose system | |
| CN108255171A (zh) | 用于提高自主驾驶车辆的稳定性的方法和系统 | |
| US20210278849A1 (en) | A tunnel-based planning system for autonomous driving vehicles | |
| CN108137015A (zh) | 用于自动驾驶车辆的侧滑补偿控制方法 | |
| US20220075387A1 (en) | Electronic device and control method thereof | |
| US12305997B2 (en) | Routing multiple autonomous vehicles using local and general route planning | |
| US11221405B2 (en) | Extended perception based on radar communication of autonomous driving vehicles | |
| US11312380B2 (en) | Corner negotiation method for autonomous driving vehicles without map and localization |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |