KR20200085982A - 차량의 주행을 보조하는 전자 장치 및 방법 - Google Patents
차량의 주행을 보조하는 전자 장치 및 방법 Download PDFInfo
- Publication number
- KR20200085982A KR20200085982A KR1020190001928A KR20190001928A KR20200085982A KR 20200085982 A KR20200085982 A KR 20200085982A KR 1020190001928 A KR1020190001928 A KR 1020190001928A KR 20190001928 A KR20190001928 A KR 20190001928A KR 20200085982 A KR20200085982 A KR 20200085982A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- bounding box
- electronic device
- risk information
- processor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
- G06F18/241—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches
- G06F18/2413—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches based on distances to training or reference patterns
-
- G06K9/00791—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/25—Determination of region of interest [ROI] or a volume of interest [VOI]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/764—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4042—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/90—Driver alarms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/92—Driver displays
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/08—Detecting or categorising vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Multimedia (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Medical Informatics (AREA)
- Health & Medical Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Software Systems (AREA)
- General Health & Medical Sciences (AREA)
- Databases & Information Systems (AREA)
- Computing Systems (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Data Mining & Analysis (AREA)
- Business, Economics & Management (AREA)
- Chemical & Material Sciences (AREA)
- Game Theory and Decision Science (AREA)
- Combustion & Propulsion (AREA)
- Life Sciences & Earth Sciences (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- General Engineering & Computer Science (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
도 2는 일 실시 예에 따라 전자 장치의 동작 방법의 흐름도이다.
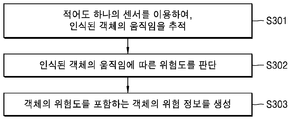
도 3은 일 실시 예에 따라 전자 장치가 위험 정보를 생성하는 예를 설명하기 위한 흐름도이다.
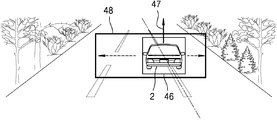
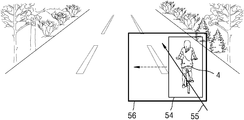
도 4a 내지 도 4c는 일 실시 예에 따라 전자 장치가 객체의 위험 정보에 기초하여 바운딩 박스를 조절하는 예를 설명하기 위한 도면이다.
도 5a 내지 도 5b는 일 실시 예에 따라 전자 장치가 객체의 위험 정보에 기초하여 바운딩 박스를 조절하는 예를 설명하기 위한 도면이다.
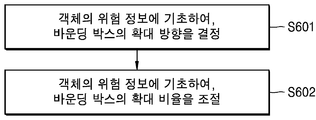
도 6은 일 실시 예에 따라 바운딩 박스의 확대 방향, 확대 비율을 조절하는 예를 설명하기 위한 흐름도이다.
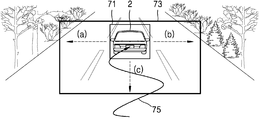
도 7a 내지 도 7b는 일 실시 예에 따라 바운딩 박스의 확대 방향을 조절하는 예를 설명하기 위한 도면이다.
도 8a 내지 도 8b는 일 실시 예에 따라 바운딩 박스의 확대 비율을 조절하는 예를 설명하기 위한 도면이다.
도 9는 일 실시 예에 따라 가상의 바운딩 박스를 생성하는 예를 설명하기 위한 흐름도이다.
도 10은 일 실시 예에 따라 가상의 바운딩 박스를 생성하는 예를 설명하기 위한 도면이다.
도 11은 일 실시 예에 따라 회피 영역을 재결정하는 예를 설명하기 위한 흐름도이다.
도 12는 일 실시 예에 따라 회피 영역을 재결정하는 예를 설명하기 위한 도면이다.
도 13은 일 실시 예에 따라 차량의 주행 상황에 관한 알림을 제공하는 예를 설명하기 위한 도면이다.
도 14는 일 실시예에 따른 전자 장치의 블록 구성도(block diagram)이다.
도 15는 일 실시예에 따른 전자 장치의 상세 블록 구성도(block diagram)이다.
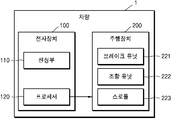
도 16은 일 실시예에 따른 차량의 블록 구성도(block diagram)이다.
110 : 센싱부
120 : 프로세서
Claims (20)
- 차량의 주행을 보조하는 전자 장치에 있어서,
적어도 하나의 센서를 포함하는 센싱부;
하나 이상의 인스트럭션을 저장하는 메모리; 및
상기 메모리에 저장된 상기 하나 이상의 인스트럭션을 실행하는 프로세서를 포함하고,
상기 프로세서는, 상기 하나 이상의 인스트럭션을 실행함으로써,
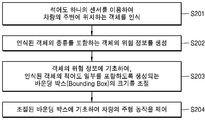
상기 적어도 하나의 센서를 이용하여 상기 차량의 주변에 위치하는 객체를 인식하고,
상기 인식된 객체의 종류를 포함하는 상기 객체의 위험 정보를 생성하고,
상기 객체의 위험 정보에 기초하여, 상기 인식된 객체의 적어도 일부를 포함하도록 생성되는 바운딩 박스(Bounding Box)의 크기를 조절하고,
상기 조절된 바운딩 박스에 기초하여 상기 차량의 주행 동작을 제어하는, 전자 장치.
- 제1 항에 있어서,
상기 프로세서는, 상기 하나 이상의 인스트럭션을 실행함으로써,
상기 적어도 하나의 센서를 이용하여, 상기 인식된 객체의 움직임을 추적함으로써, 상기 객체의 위험도를 판단하는, 전자 장치.
- 제1 항에 있어서,
상기 프로세서는, 상기 하나 이상의 인스트럭션을 실행함으로써,
상기 객체의 종류, 상기 객체의 크기, 상기 객체의 이동 속도, 상기 객체의 이동 방향, 상기 차량과 상기 객체 간의 거리 및 상기 객체 주변의 공간 중 적어도 하나에 기초하여, 상기 객체의 위험도를 판단하는, 전자 장치.
- 제1 항에 있어서,
상기 프로세서는, 상기 하나 이상의 인스트럭션을 실행함으로써,
상기 객체의 위험도를 더 포함하는 상기 객체의 위험 정보를 생성하는, 전자 장치.
- 제1 항에 있어서,
상기 프로세서는, 상기 하나 이상의 인스트럭션을 실행함으로써,
상기 객체의 위험 정보에 기초하여, 상기 바운딩 박스의 확대 방향을 결정하는, 전자 장치.
- 제1 항에 있어서,
상기 프로세서는, 상기 하나 이상의 인스트럭션을 실행함으로써,
상기 객체의 위험 정보에 기초하여, 상기 바운딩 박스의 확대 비율을 조절하는, 전자 장치.
- 제1 항에 있어서,
상기 프로세서는, 상기 하나 이상의 인스트럭션을 실행함으로써,
상기 객체의 위험 정보에 기초하여, 상기 인식된 객체 주변에 가상의 바운딩 박스를 생성하고,
상기 생성된 가상의 바운딩 박스에 기초하여 상기 차량의 주행 동작을 제어하는, 전자 장치.
- 제1 항에 있어서,
상기 프로세서는, 상기 하나 이상의 인스트럭션을 실행함으로써,
상기 차량이 상기 인식된 객체를 회피하여 주행할 수 있는 회피 영역을 결정하고,
상기 객체의 위험 정보에 기초하여, 상기 회피 영역을 재 결정하고,
상기 재 결정된 회피 영역에 기초하여 상기 차량의 주행 동작을 제어하는, 전자 장치.
- 제8 항에 있어서,
상기 프로세서는, 상기 하나 이상의 인스트럭션을 실행함으로써,
상기 객체의 위험 정보에 기초하여, 상기 인식된 객체 주변의 적어도 일부 영역을 상기 회피 영역으로부터 제외시킴으로써, 상기 회피 영역을 재 결정하는, 전자 장치.
- 제9 항에 있어서,
상기 프로세서는, 상기 하나 이상의 인스트럭션을 실행함으로써,
상기 객체의 위험 정보에 기초하여, 상기 회피 영역으로부터 제외시키는 상기 적어도 일부 영역을 확대 또는 축소시키는, 전자 장치.
- 제1 항에 있어서,
출력부를 더 포함하고,
상기 프로세서는, 상기 하나 이상의 인스트럭션을 실행함으로써,
상기 출력부를 통해, 상기 객체의 위험 정보에 기초하여, 상기 차량의 탑승자에게 주행 상황에 관한 알림을 제공하는, 전자 장치.
- 차량의 주행을 보조하는 방법에 있어서,
적어도 하나의 센서를 이용하여 상기 차량의 주변에 위치하는 객체를 인식하는 단계;
상기 인식된 객체의 종류를 포함하는 상기 객체의 위험 정보를 생성하는 단계;
상기 객체의 위험 정보에 기초하여, 상기 인식된 객체의 적어도 일부를 포함하도록 생성되는 바운딩 박스(Bounding Box)의 크기를 조절하는 단계; 및
상기 조절된 바운딩 박스에 기초하여 상기 차량의 주행 동작을 제어하는 단계를 포함하는, 방법.
- 제12 항에 있어서,
상기 적어도 하나의 센서를 이용하여, 상기 인식된 객체의 움직임을 추적함으로써, 상기 객체의 위험도를 판단하는 단계를 더 포함하는, 방법.
- 제12 항에 있어서,
상기 객체의 종류, 상기 객체의 크기, 상기 객체의 이동 속도, 상기 객체의 이동 방향, 상기 차량과 상기 객체 간의 거리 및 상기 객체 주변의 공간 중 적어도 하나에 기초하여, 상기 객체의 위험도를 판단하는 단계를 더 포함하는, 방법.
- 제12 항에 있어서,
상기 객체의 위험 정보를 생성하는 단계는,
상기 객체의 위험도를 더 포함하는 상기 객체의 위험 정보를 생성하는, 방법.
- 제12 항에 있어서,
상기 바운딩 박스(Bounding Box)의 크기를 조절하는 단계는,
상기 객체의 위험 정보에 기초하여, 상기 바운딩 박스의 확대 방향을 결정하는 단계를 포함하는, 방법.
- 제12 항에 있어서,
상기 바운딩 박스(Bounding Box)의 크기를 조절하는 단계는,
상기 객체의 위험 정보에 기초하여, 상기 바운딩 박스의 확대 비율을 조절하는 단계를 포함하는, 방법.
- 제12 항에 있어서,
상기 객체의 위험 정보에 기초하여, 상기 인식된 객체 주변에 가상의 바운딩 박스를 생성하는 단계;
상기 생성된 가상의 바운딩 박스에 기초하여 상기 차량의 주행 동작을 제어하는 단계를 포함하는, 방법.
- 제12 항에 있어서,
상기 차량이 상기 인식된 객체를 회피하여 주행할 수 있는 회피 영역을 결정하는 단계;
상기 객체의 위험 정보에 기초하여, 상기 회피 영역을 재 결정하는 단계; 및
상기 재 결정된 회피 영역에 기초하여 상기 차량의 주행 동작을 제어하는 단계를 포함하는, 방법.
- 제12 항의 방법을 컴퓨터에서 실행시키기 위한 프로그램을 기록한 컴퓨터로 읽을 수 있는 기록매체.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190001928A KR102714095B1 (ko) | 2019-01-07 | 2019-01-07 | 차량의 주행을 보조하는 전자 장치 및 방법 |
| PCT/KR2020/000228 WO2020145607A1 (en) | 2019-01-07 | 2020-01-07 | Electronic apparatus and method of assisting driving of vehicle |
| US16/735,959 US11535252B2 (en) | 2019-01-07 | 2020-01-07 | Electronic apparatus and method of assisting driving of vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190001928A KR102714095B1 (ko) | 2019-01-07 | 2019-01-07 | 차량의 주행을 보조하는 전자 장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200085982A true KR20200085982A (ko) | 2020-07-16 |
| KR102714095B1 KR102714095B1 (ko) | 2024-10-10 |
Family
ID=71404065
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190001928A Active KR102714095B1 (ko) | 2019-01-07 | 2019-01-07 | 차량의 주행을 보조하는 전자 장치 및 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11535252B2 (ko) |
| KR (1) | KR102714095B1 (ko) |
| WO (1) | WO2020145607A1 (ko) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220283312A1 (en) * | 2021-03-08 | 2022-09-08 | Hyundai Mobis Co., Ltd. | System and method for tracking vehicle |
| WO2022225226A1 (ko) * | 2021-04-21 | 2022-10-27 | 삼성전자 주식회사 | 차량에 탑재된 전자 장치 및 그 동작 방법 |
| KR20240166671A (ko) | 2023-05-18 | 2024-11-26 | 동국대학교 산학협력단 | 바운딩 박스 조절에 기반한 객체 탐지 장치 및 방법 |
| KR102823226B1 (ko) * | 2024-09-06 | 2025-06-20 | 주식회사 스포클립에이아이 | 노이즈픽셀의 비율을 기초로 객체 탐지 모델의 관심영역 크기를 결정하는 방법 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102653342B1 (ko) * | 2019-05-20 | 2024-04-02 | 현대모비스 주식회사 | 자율 주행 장치 및 방법 |
| KR20210083459A (ko) * | 2019-12-26 | 2021-07-07 | 주식회사 만도 | 운전자 보조 시스템, 그를 가지는 차량 및 그 제어 방법 |
| CN112668428A (zh) * | 2020-12-21 | 2021-04-16 | 北京百度网讯科技有限公司 | 车辆变道的检测方法、路侧设备、云控平台和程序产品 |
| KR20230102019A (ko) * | 2021-12-29 | 2023-07-07 | 팅크웨어(주) | 타겟 차량의 후면 검출을 위한 전자 장치 및 이의 동작 방법 |
| CN115148051A (zh) * | 2022-06-29 | 2022-10-04 | 上海集度汽车有限公司 | 交通危险提示方法、设备、装置、车辆及存储介质 |
| US12337846B2 (en) | 2022-10-04 | 2025-06-24 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods to manage drivers under abnormal driving |
| WO2024167422A1 (en) * | 2023-02-07 | 2024-08-15 | Dcx Innovations Spolka Z Ograniczona Odpowedzielnoscia | System for automatically detecting objects of interest and determining their geographic positions |
| KR20240125214A (ko) * | 2023-02-10 | 2024-08-19 | 현대자동차주식회사 | 충돌을 회피하기 위한 차량 및 차량의 작동 방법 |
| US20240282080A1 (en) * | 2023-02-16 | 2024-08-22 | Torc Robotics, Inc. | Systems and methods for using image data to analyze an image |
| US20240321102A1 (en) * | 2023-03-20 | 2024-09-26 | Qualcomm Incorporated | Cloud-determined, vehicle-specific vulnerable roadside unit (vru) bounding box |
| US12528500B2 (en) * | 2023-05-26 | 2026-01-20 | GM Global Technology Operations LLC | System and method for planning a path for a vehicle |
| US20250026376A1 (en) * | 2023-07-20 | 2025-01-23 | Torc Robotics, Inc. | Lazy actor avoidance |
| US20260087930A1 (en) * | 2024-09-26 | 2026-03-26 | Ford Global Technologies, Llc | Systems and methods for maneuvering an automated vehicle |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150110344A1 (en) * | 2013-10-23 | 2015-04-23 | Toyota Motor Engineering & Manufacturing North America, Inc. | Image and map-based detection of vehicles at intersections |
| KR20180112336A (ko) * | 2017-04-03 | 2018-10-12 | 삼성전자주식회사 | 복수의 센서를 이용하여 객체를 인식하는 전자 기기 및 방법 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6687577B2 (en) * | 2001-12-19 | 2004-02-03 | Ford Global Technologies, Llc | Simple classification scheme for vehicle/pole/pedestrian detection |
| US8466807B2 (en) * | 2011-06-01 | 2013-06-18 | GM Global Technology Operations LLC | Fast collision detection technique for connected autonomous and manual vehicles |
| US9221396B1 (en) * | 2012-09-27 | 2015-12-29 | Google Inc. | Cross-validating sensors of an autonomous vehicle |
| US8977007B1 (en) | 2013-04-23 | 2015-03-10 | Google Inc. | Detecting a vehicle signal through image differencing and filtering |
| US9305223B1 (en) | 2013-06-26 | 2016-04-05 | Google Inc. | Vision-based indicator signal detection using spatiotemporal filtering |
| US10185329B2 (en) | 2016-10-24 | 2019-01-22 | GM Global Technology Operations LLC | Methods and systems for vehicle-to-vehicle communication |
| US10160448B2 (en) | 2016-11-08 | 2018-12-25 | Ford Global Technologies, Llc | Object tracking using sensor fusion within a probabilistic framework |
| US20180137756A1 (en) | 2016-11-17 | 2018-05-17 | Ford Global Technologies, Llc | Detecting and responding to emergency vehicles in a roadway |
| KR102441062B1 (ko) | 2016-12-16 | 2022-09-06 | 현대자동차주식회사 | 바운더리 기반 차량의 충돌 제어 장치 및 방법 |
-
2019
- 2019-01-07 KR KR1020190001928A patent/KR102714095B1/ko active Active
-
2020
- 2020-01-07 WO PCT/KR2020/000228 patent/WO2020145607A1/en not_active Ceased
- 2020-01-07 US US16/735,959 patent/US11535252B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150110344A1 (en) * | 2013-10-23 | 2015-04-23 | Toyota Motor Engineering & Manufacturing North America, Inc. | Image and map-based detection of vehicles at intersections |
| KR20180112336A (ko) * | 2017-04-03 | 2018-10-12 | 삼성전자주식회사 | 복수의 센서를 이용하여 객체를 인식하는 전자 기기 및 방법 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220283312A1 (en) * | 2021-03-08 | 2022-09-08 | Hyundai Mobis Co., Ltd. | System and method for tracking vehicle |
| US12158526B2 (en) * | 2021-03-08 | 2024-12-03 | Hyundai Mobis Co., Ltd. | System and method for tracking vehicle |
| WO2022225226A1 (ko) * | 2021-04-21 | 2022-10-27 | 삼성전자 주식회사 | 차량에 탑재된 전자 장치 및 그 동작 방법 |
| KR20240166671A (ko) | 2023-05-18 | 2024-11-26 | 동국대학교 산학협력단 | 바운딩 박스 조절에 기반한 객체 탐지 장치 및 방법 |
| KR102823226B1 (ko) * | 2024-09-06 | 2025-06-20 | 주식회사 스포클립에이아이 | 노이즈픽셀의 비율을 기초로 객체 탐지 모델의 관심영역 크기를 결정하는 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11535252B2 (en) | 2022-12-27 |
| WO2020145607A1 (en) | 2020-07-16 |
| US20200216075A1 (en) | 2020-07-09 |
| KR102714095B1 (ko) | 2024-10-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102714095B1 (ko) | 차량의 주행을 보조하는 전자 장치 및 방법 | |
| CN108885836B (zh) | 驾驶辅助装置、系统、方法、控制装置、车辆及介质 | |
| US11157001B2 (en) | Device and method for assisting with driving of vehicle | |
| KR102564013B1 (ko) | 차량 제어 장치, 그를 포함한 시스템 및 그 방법 | |
| CN102792349B (zh) | 驾驶辅助装置 | |
| US10139818B2 (en) | Visual communication system for autonomous driving vehicles (ADV) | |
| KR102936555B1 (ko) | 차량의 주행을 보조하는 전자 장치 및 방법 | |
| KR102343329B1 (ko) | 차량의 운전을 보조하는 전자 장치 및 방법 | |
| KR102354332B1 (ko) | 차량의 주행을 보조하는 장치 및 방법 | |
| US20170341648A1 (en) | Autonomous driving control apparatus, driving information output apparatus, footrest, autonomous driving control method, and driving information output method | |
| CN111801260A (zh) | 利用底盘反馈的高级驾驶员注意力升级 | |
| KR20200131664A (ko) | 차량의 주행을 보조하는 전자 장치 및 방법 | |
| CN114764022B (zh) | 用于自主驾驶车辆的声源检测和定位的系统和方法 | |
| KR20190134862A (ko) | 전자 장치 및 그 동작 방법 | |
| KR20190109663A (ko) | 차량의 주행을 보조하는 전자 장치 및 방법 | |
| KR102425036B1 (ko) | 차량 및 그 제어방법 | |
| US12503130B2 (en) | Driving assistance device, driving assistance method, and storage medium | |
| CN113264030A (zh) | 驾驶辅助系统 | |
| KR102689150B1 (ko) | 자율 주행 장치 및 방법 | |
| US11704827B2 (en) | Electronic apparatus and method for assisting with driving of vehicle | |
| JP6976050B2 (ja) | 駐車制御装置の姿勢推定方法、及び姿勢推定装置 | |
| KR102087359B1 (ko) | 차량의 경로 기반 운전자 시선 유도 방법 및 장치 | |
| WO2021186783A1 (ja) | 車両動作支援制御装置、車両動作支援装置、車両動作支援制御方法およびプログラム | |
| KR20260010882A (ko) | 전방주시거리 결정 방법 및 이를 이용하는 경로 추종 제어 장치 | |
| KR20230055840A (ko) | 자율 주행 차량을 제어하는 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20190107 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20220104 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20190107 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20231115 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20240723 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20240930 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20241002 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |