KR20200086740A - 부착 허브로부터 배치하기 위한 가요성 위성 - Google Patents
부착 허브로부터 배치하기 위한 가요성 위성 Download PDFInfo
- Publication number
- KR20200086740A KR20200086740A KR1020207018431A KR20207018431A KR20200086740A KR 20200086740 A KR20200086740 A KR 20200086740A KR 1020207018431 A KR1020207018431 A KR 1020207018431A KR 20207018431 A KR20207018431 A KR 20207018431A KR 20200086740 A KR20200086740 A KR 20200086740A
- Authority
- KR
- South Korea
- Prior art keywords
- attachment
- satellite
- boom
- payload
- payloads
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/10—Artificial satellites; Systems of such satellites; Interplanetary vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/64—Systems for coupling or separating cosmonautic vehicles or parts thereof, e.g. docking arrangements
- B64G1/641—Interstage or payload connectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/64—Systems for coupling or separating cosmonautic vehicles or parts thereof, e.g. docking arrangements
- B64G1/645—Separators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/64—Systems for coupling or separating cosmonautic vehicles or parts thereof, e.g. docking arrangements
- B64G1/645—Separators
- B64G1/6457—Springs; Shape memory actuators
-
- B64G2700/00—
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Physics & Mathematics (AREA)
- Astronomy & Astrophysics (AREA)
- General Physics & Mathematics (AREA)
- Details Of Aerials (AREA)
- Radio Relay Systems (AREA)
Abstract
예시적인 위성은 가요성 붐에 의해 서로 연결된 한 쌍의 페이로드를 포함하고, 여기서 가요성 붐은 연관된 부착 허브와 함께 한 쌍의 페이로드를 용이하게 수동으로 맞물리도록 하고, 또한 적어도 하나의 페이로드를 부착 허브로부터 바깥 방향으로 배치하기 위한 수동 해제 력을 제공하도록 구성된다. 페이로드를 부착 허브에 부착하기 위해 구부러질 때 수동 해제를 가능하게 하기 위한 잠재적 에너지가 가요성 붐에 저장된 변형 에너지로서 제공된다. 변형 에너지는 부착 허브로부터 하나 이상의 페이로드가 해제될 때 방출된다. 추가 페이로드는 인접한 페이로드를 연결하는 가요성 붐과 함께 한 쌍의 페이로드에 직렬로 연결될 수 있다. 추가 페이로드는 비 복잡하거나 복잡한 부착 메커니즘을 통해 부착 허브에서 분리될 수 있다.
Description
본 발명은 일반적으로 부착 허브로부터 배치하기 위한 위성, 보다 구체적으로는 ESPA- 클래스 허브에의 부착 및 배치를 위한 가요성 위성 및 ESPA 클래스 허브에서 가요성 소형 위성을 부착 및 배치하는 방법에 관한 것이다.
소형 위성으로도 알려진 소형 위성의 개발은 중량, 부피, 질량, 치수, 간격 등에 대한 요구 사항을 포함하여 긴 요구 사항 목록을 준수해야 한다. 이러한 요구 사항으로 인해 저전력 저 방열 사양이 필요하기 때문에 소규모의 미션 효용을 줄일 수 있다. 요구 사항은 종종 온보드 장비 및 배포 장비의 조밀한 포장으로 이어진다.
예를 들어, EELV(evolved expendable launch vehicle) 2 차 페이로드(payload) 어댑터(ESPA)로부터 부착 및 배치 가능한 페이로드를 갖는 위성의 경우, 페이로드 모듈은 이전에 열거된 많은 요구 사항을 준수해야한다. 배치된 위성은 부착된 상태 및 배치된 상태 모두에서 어떤 방식으로 상호 연결된 다수의 페이로드를 포함할 수 있다. 상호 연결 자체는 배치 후 페이로드 모듈을 서로에 대해 안정화해야 하거나 페이로드 모듈을 서로 결합해야 하기 때문에 미션 유틸리티를 제한할 수 있다. 따라서, 상호 접속 장비는 종종 이동 부품을 필요로 하는데, 이는 전기 연결, 열 연결, RF 연결 및 전력 연결과 같은 하나 이상의 측면과 관련하여 페이로드 모듈 간의 연결을 제한하거나 완전히 방지한다.
또한, 각각의 페이로드 모듈에 대해 배치 메커니즘이 요구되며, 이러한 배치 메커니즘의 복잡성은 종종 페이로드 모듈의 상호 연결성에 비해 증가한다. 복잡하고 비용이 많이 드는 배포 메커니즘의 한 예는 Planetary Systems Corporation의 Lightband이다. 이러한 각 예에서 복잡성은 일반적으로 무게, 질량, 부피, 전력 요구, 비용 및 고장 위험을 수반하는 구성 요소의 수를 증가시킨다.
본문 내에 포함되어 있음.
본 개시는 ESPA- 클래스 허브와 같은 부착 허브로부터 부착 및 배치될 수 있고, 다수의 종래 기술된 관심사를 해결하는 예시적인 위성을 제공한다. 예시적인 위성은 가요성 부재에 의해 서로 연결된 적어도 한 쌍의 페이로드 모듈(페이로드라고도 함)을 포함한다. 가요성 부재는 ESPA 인터페이스에서의 토크 요구 사항, ESPA 허브에 부착하는 동안의 강성 요구 사항 및 전개된 작동에 대한 강성 요구 사항을 충족시키도록 구성된다. 가요성 멤버는 인접한 페이로드 사이의 지속적인 연결을 가능하게 하여 복잡한 시스템이 페이로드를 서로 연결하여 그러한 연결을 설정하지 않아도 된다. 또한, 가요성 부재는 하나 이상의 페이로드의 배치를 보조함으로써, 하나 이상의 복잡하고 비용이 많이 드는 배치 메커니즘의 필요성을 감소시키거나 완전히 제거한다.
예시적인 위성은 가요성 붐에 의해 서로 연결된 한 쌍의 페이로드를 포함하고, 여기서 가요성 붐은 연관된 부착 허브와 함께한 쌍의 페이로드를 용이하게 수동으로 맞물 리도록 하고, 또한 적어도 하나의 페이로드를 부착 허브로부터 바깥 방향으로 배치하기위한 수동 해제 력을 제공하도록 구성된다. 페이로드를 부착 허브에 부착하기 위해 구부러질 때 수동 해제를 가능하게 하기 위한 잠재적 에너지가 가요성 붐에 저장된 변형 에너지로서 제공된다. 변형 에너지는 부착 허브로부터 적어도 하나의 페이로드가 해제될 때 방출되며, 이 방출은 비 복합의 비 이물질 부착 메커니즘에 의해 이루어질 수 있다. 추가 페이로드는 인접한 페이로드를 연결하는 가요성 붐과 함께 한 쌍의 페이로드에 직렬로 연결될 수 있다. 추가 페이로드는 복잡한 비 복합 부착 메커니즘을 통해 부착 허브에서 분리될 수 있다.
일 양태에 따르면, 위성은 한 쌍의 페이로드 및 각각의 페이로드 사이에서 연장되고 각각의 페이로드에 결합된 가요성 붐을 포함한다. 위성은 붐을 구부림으로써 부착 허브와 맞물리고 부착 허브로부터 위성의 수동 해제 력을 제공하도록 구성된다.
수동 해제 력은 부착 허브로부터 바깥쪽으로 떨어진 하나 이상의 페이로드의 수동 분리를 제공할 수 있다.
붐의 굴곡은 허브 주위에 서로 이격된 각각의 페이로드의 부착을 허용할 수 있다.
가요성 붐은 단일 정지 위치를 가질 수 있다.
가요성 붐은 페이로드 사이의 비 직선 선형 중심 경로를 따라 연장될 수 있다.
가요성 붐은 힌지가 없는 붐일 수 있다.
페이로드 중 적어도 하나는 페이로드를 부착 허브로부터 바깥쪽으로 멀리 배치하기 위해 페이로드에 힘을 가하지 않고 부착 허브로부터 페이로드를 분리 가능하게 해제하도록 구성된 커플링을 포함할 수 있다.
모든 구성에서 붐은 페이로드 사이에 연속적인 열, RF 또는 전기적 연결을 허용할 수 있다.
모든 구성에서 붐은 페이로드가 서로 물리적으로 맞물리지 않도록 구성될 수 있다.
위성은 제 3 페이로드 및 한 쌍의 페이로드의 하나의 페이로드와 제 3 페이로드 사이에 연장되어 결합되는 제 3 페이로드 및 제 2 가요성 붐을 더 포함할 수 있고, 3 개의 페이로드 및 2 개의 가요성 붐을 포함하는 위성은 2 개의 붐을 구부림으로써 부착 허브와 맞물리고 부착 허브로부터 위성의 수동 해제 력을 제공하도록 구성된다.
위성은 포트 중 하나에서 부착 허브에 부착된 한 쌍의 페이로드 중 적어도 하나의 페이로드를 갖는 복수의 포트를 갖는 부착 허브와 조합될 수 있다.
다른 양태에 따르면, 위성은 부착 허브의 포트에 개별적으로 부착하기위한 부착 부분을 각각 갖는 한 쌍의 페이로드 및 상기 한 쌍의 페이로드의 각각의 페이로드 사이에서 연장되고 그에 연결된 커플링 부재를 포함하고, 커플링 부재는 커플링 부재가 저장된 에너지를 갖는, 부착 허브에 부착하기위한 편향된 상태와, 저장된 에너지를 갖는 커플링 부재와, 부착 허브로부터 외부로의 적어도 부분 배치를 위한 기본 상태 사이에서 전이되도록 구성된다.
페이로드는 커플링 부재가 기본 상태에 있을 때 보다 커플링 부재가 편향된 상태에 있을 때 서로 더 가깝게 이격될 수 있다.
커플링 부재는 단일 기본 상태를 갖도록 구성될 수 있다.
모든 상태의 커플링 부재는 페이로드 사이에 연속적인 열, RF 또는 전기적 연결을 허용하도록 구성될 수 있다.
모든 상태의 커플링 부재는 페이로드가 서로 물리적으로 결합되는 것을 방지하도록 구성될 수 있다.
위성은 제 3 페이로드와, 한 쌍의 페이로드의 하나의 페이로드와 제 3 페이로드 사이에 연장되어 결합되는 제 2 페이로드 및 제 2 커플링 부재를 더 포함 할 수 있고, 제2 커플링 부재는 제 2 커플링 부재가 저장된 에너지를 갖는, 부착 허브에 부착하기 위한 편향된 상태와 저장된 에너지의 방출 후 부착 허브로부터 외부로 적어도 부분적으로 배치하기 위한 기본 상태 사이에 전이하도록 구성되어 있다.
다른 양태에 따르면, 부착 허브로부터 위성을 배치하는 방법은(a) 한 쌍의 페이로드를 갖고 그 사이에 연장되는 가요성 붐을 구비한 위성을 제공하고, 각각의 페이로드는 부착 메커니즘에 의해 부착 허브에 결합되는 단계;(b) 부착 허브에 대하여 제1의 페이로드를 선택적으로 결합시키는 부착 메커니즘을 해제하는 단계; 및(c) 변형 에너지를 저장한 편향된 상태에서 기본 상태로 가요성 붐을 전이시키고, 그에 따라 가요성 붐으로부터 저장된 변형 에너지의 방출을 통해 부착 허브로부터 제 1의 페이로드를 외부로 배치하는 단계를 포함한다.
가요성 붐으로부터 저장된 변형 에너지의 방출은 가요성 붐으로부터 저장된 변형 에너지의 방출은 편향된 상태로부터 비편향되는 붐을 포함할 수 있다.
상기 방법은 커플링 부재가 제 1의 페이로드를 부착 허브로부터 바깥쪽으로 배치하는 제 1의 페이로드에 힘을 가하지 않고, 상기 제 1의 페이로드를 상기 부착 허브에 선택적으로 결합시키는 부착메커니즘을 해제하는 단계를 더 포함할 수 있다.
전술한 목적 및 관련 목적을 달성하기 위해, 본 발명은 이하에서 충분히 설명되고 특히 청구 범위에서 지적되는 특징을 포함한다. 다음의 설명 및 첨부 도면은 본 발명의 특정 예시적인 실시 예를 상세히 설명한다. 그러나, 이들 실시 예는 본 발명의 원리가 사용될 수 있는 다양한 방식 중 일부만을 나타낸다. 본 발명의 다른 목적, 장점 및 신규한 특징은 도면과 함께 고려될 때 본 발명의 다음의 상세한 설명으로부터 명백해질 것이다.
본문 내에 포함되어 있음.
반드시 비례하는 것은 아닌 첨부된 도면은 본 개시의 다양한 양태를 도시한다.
도 1은 본 발명에 따른 위성을 포함하는 항공 우주 차량의 개략도이다.
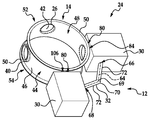
도 2는 부착 허브에 부착된 본 발명에 따른 예시적인 위성의 직교도이다.
도 3은 도 2의 위성의 다른 직교도이다.
도 4는 도 2의 위성을 부착 허브에 부착하기 위한 예시적인 해제 메커니즘의 정면도이다.
도 5는 도 4의 섹션 A-A에 도시된 도 4의 해제 메커니즘의 부분도이다.
도 6은 도 4의 B-B 선을 따라 취한 도 4의 해제메커니즘의 단면도이다.
도 7은 도 2에 도시된 부착 허브에 부착된 도 2의 위성의 정면도이다.
도 8은 부착 허브로부터 적어도 부분적으로 전개된 위성을 도시한, 도 2의 위성의 정면도이다.
도 9는 부착 허브로부터 완전히 전개된 위성을 도시한, 도 2의 위성의 정면도이다.
도 10은 부착 허브와 분리된, 도 2의 위성의 정면도이다.
도 11은 전개된 상태에서의 도 2의 위성의 개략도이다.
도 12는 적재 상태에서의 도 2의 위성의 개략도이다.
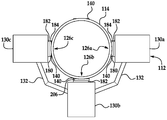
도 13은 부착 허브에 부착된 본 발명에 따른 다른 예시적인 위성의 직교도이다.
도 14는 도 13의 위성의 다른 직교도이다.
도 15는 도 13에 도시된 부착 허브에 부착된 위성을 도시한, 도 13의 위성의 입면도이다.
도 16은 부착 허브로부터 분리된, 도 13의 위성의 정면도이다.
도 1은 본 발명에 따른 위성을 포함하는 항공 우주 차량의 개략도이다.
도 2는 부착 허브에 부착된 본 발명에 따른 예시적인 위성의 직교도이다.
도 3은 도 2의 위성의 다른 직교도이다.
도 4는 도 2의 위성을 부착 허브에 부착하기 위한 예시적인 해제 메커니즘의 정면도이다.
도 5는 도 4의 섹션 A-A에 도시된 도 4의 해제 메커니즘의 부분도이다.
도 6은 도 4의 B-B 선을 따라 취한 도 4의 해제메커니즘의 단면도이다.
도 7은 도 2에 도시된 부착 허브에 부착된 도 2의 위성의 정면도이다.
도 8은 부착 허브로부터 적어도 부분적으로 전개된 위성을 도시한, 도 2의 위성의 정면도이다.
도 9는 부착 허브로부터 완전히 전개된 위성을 도시한, 도 2의 위성의 정면도이다.
도 10은 부착 허브와 분리된, 도 2의 위성의 정면도이다.
도 11은 전개된 상태에서의 도 2의 위성의 개략도이다.
도 12는 적재 상태에서의 도 2의 위성의 개략도이다.
도 13은 부착 허브에 부착된 본 발명에 따른 다른 예시적인 위성의 직교도이다.
도 14는 도 13의 위성의 다른 직교도이다.
도 15는 도 13에 도시된 부착 허브에 부착된 위성을 도시한, 도 13의 위성의 입면도이다.
도 16은 부착 허브로부터 분리된, 도 13의 위성의 정면도이다.
본 발명은 일반적으로 ESPA 클래스 차량에 의해 외부 공간으로 운반된 ESPA 클래스 허브와 같은 부착 허브로부터, 일반적으로 행성 대기 외부의 항공 우주 배치 용 위성에 관한 것이다. 본 발명은 보다 구체적으로 ESPA 클래스 허브에 부착 및 배치할 수 있는 가요성 소형-위성 및 ESPA 클래스 허브에서 가요성 소형 위성을 부착 및 배치하는 방법에 관한 것이다.
본 발명은 부착 허브에 부착하기 쉽고 항공 우주 차량에 의해 우주 공간으로 운반되는 위성에 대한 필수 표준 및 요건을 충족시키면서 부착 허브로부터 위성을 분리 및 배치하기 위한 배치 메커니즘의 비용 및 복잡성을 감소시키는 위성을 제공한다. 본 발명은 일반적으로 소위 소형 위성에 관한 것이지만, - 일반적으로 소형 위성이 약 500 kg(약 1,100 lbs) 미만인 것과 같은 대형 위성에 비해 질량이 낮고 크기가 작다 - 본 발명은 크고 작은 다양한 크기의 위성에 동일하게 관한 것이다. 본 발명은 또한 대기, 수중 등과 같은 다른 방출 환경에서 방출하기 위한 모듈에도 적용될 수 있다.
도 1은 장비를 행성 대기 밖으로 그리고 대기가 없거나 없는, 중력이 있거나 없는, 또는 전형적으로 외부 공간으로 지칭되는 방출 환경으로 장비를 운송하기 위한 예시적인 항공 우주 차량(10)을 도시한다. 차량(10)은 부착 허브(14)에 부착된 상태에서 본 발명에 따른 위성(12)을 해제 환경으로 운송하는데 이용될 수 있다.
차량(10)은 하나 이상의 부스터(16)에 연결된 동체(도시되지 않음)를 포함한다. 부스터(16)는 추진 가스를 부스터(16)로부터 외부로 향하게 하는 노즐(18)을 포함한다. 동체는 페어링(20) 내에 있는 하나 이상의 부착 허브(14)에 부착될 수 있다. 동체는 또한 페어링 환경(20) 내에 상주하는 위성과 같은 1 차 차량(15)과 같은 방출 환경에서 방출되기 위해 하나 이상의 차량에 부착될 수 있다. 부착된 허브(14) 및 위성(12)은 도시된 실시 예에서 1 차 차량(15)에 직접 결합되지 않지만, 하나 이상의 부착 허브(14) 및 위성(12)을 1 차 차량(15)에 직접 결합시키는 것이 일부 실시 예에 통합될 수 있다. 일부 실시 예들에서, 하나 이상의 1 차 차량(15)이 차량(10)에 포함될 수 있거나 1 차 차량(15)이 생략될 수 있다.
페어링(20)은 동체에 대해 분리 가능하게 해제 가능하며, 운송 동안 허브(14)에 부착된 1 차 차량(15), 부착 허브(14) 및 위성(12)을 보호한다. 페어링(20)은 노즈 콘(22)을 포함할 수 있거나, 노즈 콘(22)은 달리 동체에 부착될 수 있고 페어링(20)과 분리될 수 있다. 페어링(20)은 적절한 해제 환경에 있을 때 부착 허브(14)(및 허브(14)에 부착된 위성(12))가 나머지 차량(10)으로부터 해제되도록 임의의 적절한 방식으로 분리될 수 있다.
이제 도 2 및 도 3을 참조하면, 예를 들어, 도 1의 차량(10)과 함께 사용하기 위한 예시적인 위성 어셈블리(24)가 도시되어 있다. 도시된 위성 조립체(24)는 부착 허브(14) 및 포트(26)와 같은 허브(14)의 부착 위치에 부착된 단일 위성(12)을 포함한다. 위성(12)은 복수의 상호 연결된 페이로드(30)를 포함한다. 특히, 도시된 위성(12)은 커플링 부재(32)에 의해 서로 결합되는 한 쌍의 페이로드(30)를 포함한다. 페이로드 모듈 또는 모듈이라고도 할 수 있는 각각의 페이로드(30)는 부착 허브(14)의 개별 포트(26)에 부착된다.
부착 허브(14)는 방출 환경으로의 이송 동안 하나 이상의 위성(12)의 하나 이상의 페이로드(30)를 안정화시키기 위한 임의의 적절한 구조일 수 있다. 도시된 부착 허브(14)는 링의 형태와 같이 일반적으로 강성 및 환형 구조를 갖는 진화된 보급형 발사체(EELV) 이차 페이로드 어댑터(ESPA) 허브이다. 부착 허브(14)는 경량 금속과 같은 금속과 같은 임의의 적합한 재료로 제조된다. 환형 허브 주위에는 복수의 포트(26)가 배치된다. 도시된 부착 허브(14)는 부착 허브(14) 주위에서 균등하게 원주로 분리된 4 개의 포트(26)를 포함한다. 포트들(26) 각각은 위성(12)의 페이로드(30)의 부착을 지원하기 위해 반경 방향 외향 돌출 림(40)을 포함한다. 개구(42)는 각각의 포트(26)에 의해 형성되고, 여기서 각각의 구멍(42)은 환형 몸체(46)의 반경 방향 외부 표면(44)으로부터 환형 링 몸체(46)의 반경 방향 내부 표면(48)까지 부착 허브(14)의 환형 몸체(46)를 통해 완전히 연장된다. 상부 및 하부 칼라(50)는 환형 몸체(46)의 각각의 대향 축 방향 단부(52, 54)에서 방사상 외측으로 연장된다.
포트(26)는 각각 일반적으로 원형이며 동일한 크기이다. 각각의 포트(26)는 대향 축 방향 단부(52, 54) 사이에 동일하게 이격되어 있다. 포트(26)의 동일한 치수 및 간격, 및 중심 간격은 부착 허브(14)에 대한 힘의 균형 및 다양한 위성(12)의 균일 한 부착을 촉진한다. 다른 실시 예에서, 포트(26)는 다른 크기, 형상 및 서로에 대해 다른 위치를 가질 수 있다는 것이 이해될 것이다. 다른 수의 포트(26, 1) 이상이 포함될 수 있다.
위성(12)이 부착 허브(14)에 부착 및 배치되도록 구성되는 것으로 언급되지만, 다른 실시 예에서 모든 페이로드(30) 또는 위성(12)이 부착 허브(14)로부터 분리될 필요는 없다. 오히려, 일부 임무에서, 위성(12)의 하나 이상의 부착된 페이로드(30)는 부착 허브(14)에 부착된 상태로 유지 될 수 있으며, 부착된 페이로드(30)에 결합된 하나 이상의 다른 페이로드(30)는 부착된 허브(14)로부터 적절한 순서로 해제 될 수 있지만, 부착된 페이로드(30) 중 하나 이상에 적어도 부분적으로 결합된 상태로 유지될 수 있다.
도시된 위성(12)은 커플링 부재(32)를 구부림으로써 부착 허브(14)와 맞물리고 부착 부재(14)로부터 위성(12)의 수동 해제 력을 제공하도록 구성된다. 수동 해제 력은 위성(12)의 페이로드(30) 중 적어도 하나의 페이로드(30)를 부착 허브(14)로부터 바깥쪽으로 수동적으로 분리시킨다. 이러한 방식으로, 위성(12)은 더 상세히 설명되는 바와 같이 페이로드(30) 중 적어도 하나에 대한 복잡한 릴리즈 및 배치 메커니즘을 필요로 하지 않는다.
위성(12)의 한 쌍의 페이로드(30)는 일반적으로 제한된 적재 부피, 질량 및 중량을 가져야한다. 페이로드(30)는 직사각형인 것으로 개략적으로 도시되어 있지만, 페이로드(30)는 특정 부착 허브와 함께 사용하기 위한 또는 특정 임무를 위한 치수 요건을 준수하는 것과 같은 임의의 적합한 형상을 가질 수 있다. 예를 들어, 페이로드(30)는 약 4 피트 큐브 내지 약 1 피트 큐브의 범위보다 크지 않을 수 있으며, 또는 다른 예에서 약 3 피트 큐브 내지 약 2 피트 큐브의 범위에서, 또는 다른 예에서, 약 24 인치 x 약 28 인치 x 약 38 인치의 치수를 갖고, 따라서, 임의의 실시 예에서 폭, 길이 및 높이가 서로 동일 할 필요는 없다. 상이한 페이로드(30)는 상이한 적재량일 수도 있다.
페이로드(30)는 시각, 청각, 이미징, 전력 제공, 통신, 추진력, 명령 및 제어 장비와 같은 미션을 완료하기 위한 임의의 필요한 장비를 포함할 수 있다. 장비는 예를 들어 기계, 전기, 화학, RF, 화학 및 열 구성 요소를 포함할 수 있다. 장비의 특정 예는 장거리 이미징 카메라, 안테나, 리피터, 배터리, 연료, 태양 광 어레이 또는 과학 실험을 포함할 수 있다.
페이로드(30)는 커플링 부재(32)에 의한 적재, 배치 및 배치 후 서로에 대해 지지된다. 커플링 부재(32)는 부착 허브(14)의 포트(26)로부터 외부로 적어도 하나의 페이로드(30)를 수동으로 해제하도록 구성된다. 커플링 부재(32)는 가요성 커플링 부재인 커플링 부재(32)의 관점에서 이 수동 해제를 허용한다.
예를 들어, 도시된 커플링 부재(32)는 한 쌍의 페이로드(30)의 페이로드(30) 사이에서 연장되어 함께 커플링되는 가요성 붐(32)이다. 붐(32)은 일반적으로 원통형이며 붐(32)의 대향 단부(66, 68) 사이에서 선형 중심 경로(64)를 따라 연장된다. 선형 중심 경로(64)는 직선적이지 않으며 굽힘 부(69)를 포함한다. 굴곡부(69)는 단일 정점을 갖는 것과 같은 예각일 수 있거나, 또는 다수의 정점을 갖는 것과 같은 곡선일 수 있다.
붐(32)의 벤드(70)는 벤드(69)에 대응하고, 붐(32)의 중간 점에서와 같이 대향 단부(66, 68) 사이에 위치된다. 이러한 방식으로, 붐(32)은 대향 연장 붐 부분(72) 사이에 배치된 벤드(70)를 갖는 만곡된 붐이다. 붐 부분(72)은 동일한 크기 및 길이를 가지며, 벤드(70) 로의 전이까지 일반적으로 직선인 것으로 도시되어 있다. 예시적인 붐(32)은 중심 연장 공동을 갖는 것과 같이 단단하거나 중공일 수 있다.
다른 실시 예에서, 붐(32)은 추가 벤드(70), 둘 이상의 부분(72) 또는 부분(72) 중 임의의 하나 이상의 형상, 직경 또는 길이를 포함할 수 있다. 일부 실시 예에서 부분(72)은 직선형이 아닐 수 있다. 벤드(70)는 일부 실시 예에서 가요성 붐(32)의 중간 점에 배치되지 않을 수 있다.
붐(32)의 대향 단부(66, 68)는 각각 서로 다른 페이로드(30)에 부착되어 페이로드(30)를 서로 분리시킨다. 단부(66, 68)는 패스너, 용접, 접착제, 다른 기계적 결합 또는 이들의 임의의 조합에 의해 페이로드(30)에 고정 결합과 같이 견고하게 결합될 수 있다. 다른 커플링 방법이 또한 적합할 수 있다.
예시적인 붐(32)은 약 8 피트 내지 약 2 피트 범위, 또는 약 7 피트 내지 약 3 피트 범위, 또는 약 6 피트 내지 5 피트 범위, 예컨대 약 5.5 피트의 코드 길이를 갖는 중앙 선형 경로(64)를 갖는다.
예시적인 붐(32)은 경로(64)의 길이를 따라 일정한 직경을 갖는다. 예를 들어, 붐(32)은 약 12 인치 내지 약 2 인치 범위, 또는 약 10 인치 내지 약 4 인치 범위, 또는 약 8 인치 내지 약 6 인치 범위, 예컨대 약 7 인치의 직경을 가질 수 있다.
붐(32)은 충분한 강성과 최소의 유연성을 제공하는 임의의 적절한 재료로 제조될 수 있다. 붐(32)은 예를 들어 흑연, 알루미늄, 베릴륨, 탄소 섬유 또는 유리 섬유를 포함할 수 있다. 붐(32)의 가요성 성질은 붐(32)의 재료, 치수 및 전체 형상에 의해 영향을 받는다.
붐(32)의 굴곡은 부착 허브(14)에 대해 이격된 한 쌍의 페이로드(30)의 각각의 페이로드(30)의 부착을 허용하기 위해 붐(32)이 편향된 상태로 이동될 수 있게 한다. 특히, 붐(32)은 위성(12)을 부착 허브(14)의 포트(26)에 부착하기 위해 편향된 상태로 구부러질 수 있다. 편향된 상태에서, 가요성 붐(32)은 편향되지 않은 기본 위치로부터 편향된 위치로 붐(32)의 굴곡으로부터 붐(32)에 예하중된 변형 에너지를 유지한다. 변형 에너지의 방출은 각각의 포트(26)로부터 바깥쪽으로 페이로드(30) 중 하나의 수동적 방출을 허용하는 것과 같이, 부착 허브(14)로부터 바깥쪽으로 위성(12)의 적어도 부분적인 전개를 각각의 페이로드(30)가 포트(26)로부터 분리된 후와 같이 허용한다. 이러한 방식으로, 각각의 페이로드(30)는 수동 해제 후에 부착 허브(14)와의 간격을 유지하도록 배치된다.
저장된 변형 에너지가 해제될 때, 가요성 붐(32)은 편향된 상태로부터 붐(32)의 기본 상태로 빠르게 전이된다. 일 실시 예에서, 전이는 붐(32)을 이등분하고 중심 선형 경로(64)를 따라 연장되는 중심 평면을 따라 가요성 붐(32)의 단부(66 또는 68)의 이동을 포함할 수 있다. 전이는 페이로드(30)가 붐(32)을 편향된 상태의 붐(32)보다 기본 상태에서 먼 위치로 이동하게 한다. 전이는 변속 단부(66 또는 68)가 평면에서 약 1 mm 내지 약 10 mm 범위, 또는 약 2 mm 내지 약 8 mm의 범위, 또는 약 3 mm 내지 약 7 mm의 범위, 또는 약 4 mm 내지 약 6 mm의 범위, 예컨대 약 5 mm의 거리만큼 선형으로 이동하게 한다. 예를 들어, 더 큰 직경을 갖는 부착 허브(14)의 경우, 붐(32)은 더 작은 직경을 갖는 부착 허브와 함께 사용하는 것보다 페이로드(30)의 부착을 제공하기 위해 덜 휘어질 필요가 있을 수 있다. 이러한 최소 이동은 붐 부분(72) 사이의 각도가 붐(32)의 편향된 상태로부터 기본 상태로 최소로 증가하게 한다.
붐(32)은 단일 정지 길이 및 단일 기본 상태(휴면 상태라고도 함)를 갖도록 구성된다. 붐(32)은 또한 힌지가 없고, 적어도 부분적으로 단일 레스트 길이를 허용한다. 결과적으로,(예 : 편향된 상태, 기본 상태 및 그 사이의 전이와 같은) 모든 구성에서 붐(32)은 페이로드(30)가 붐(32)의 모든 구성에서 서로 이격되도록 한 쌍의 페이로드(30)의 페이로드(30)가 서로 물리적으로 맞물리는 것을 방지하여, 페이로드(30)는 붐(32)의 모든 구성에서 서로 이격되도록 한다.
전술한 바와 같이 가요성이지만, 붐(32)은 또한 위성(12)의 충분한 강성을 제공하도록 구성된다. 붐(32)은 자유 비행 또는 자유 기동 위성(12)에 충분한 강성과 같이, 부착 허브(14)와 별개로 전개된 작동 동안 충분한 강성을 허용한다. 이들 특성으로 인해, 위성(12)이 분리된 상태에 있을 때(및 가요성 붐(32)이 기본 상태에 있을 때), 단지 필요한 작동 강성을 유지하기 위해 페이로드(30)의 서로의 배치 후 정합이 필요하지 않다.
마찬가지로, 붐(32)은 또한 위성(12)이 차량(10)의 발사 및 차량(10)의 해제 환경으로의 전이 동안 적재되는 동안 부착 허브(14)에 부착되는 동안 강성 요건을 충족시킬 수 있게 한다. 예를 들어, 부착 허브(14)로부터 분리될 때, 도시된 위성(12)은 2 개의 질량 및 그 사이에 스프링을 갖는 자유 프리 2 체 시스템의 고유 공진 주파수(분리 주파수)를 갖는다. 가요성 붐(32)이 위성(12)을 부착 허브(14)에 부착되도록 구부러진 다음, 이어서 부착 허브(14)에 부착될 때, 도시된 위성(12)은 2 개의 질량 및 3 개의 스프링 시스템의 제 2 주파수(첨부된 주파수)를 갖는다.
부착 허브에 부착될 때, 또는 약 1:10의 분리된 공진 주파수 대 부착된 공진 주파수 비를 갖는 경우, 분리 위성(12)은 부착 허브에 부착될 때 공진 주파수의 약 30 % 내지 약 5 % 범위, 또는 공진 주파수의 약 20 % 내지 약 5 % 범위의 공진 주파수를 가질 수 있다. 붐(32)은 분리된 공진 주파수 대 부착된 공진 주파수의 비율을 제공하기 위해 그 형상, 크기 및 재료를 통해 구성된다.
일 실시 예에서, 위성(12)의 분리된 공진 주파수는 약 1Hz 내지 약 5Hz, 또는 약 2Hz 내지 약 4Hz, 또는 약 3.5Hz 또는 약 3.0Hz 일 수 있다. 그러한 실시 예에서, 위성(12)의 부착된 공진 주파수는 약 10Hz 내지 약 50Hz, 또는 약 20Hz 내지 약 40Hz, 또는 약 30Hz 또는 약 35Hz 일 수 있다.
가요성 붐(32)이 힌지가 없고 단일 기본 또는 휴지 상태를 갖는 것을 고려하면, 붐(32)은 한 쌍의 페이로드(30)의 페이로드(30) 사이의 연속적인 연결을 허용한다. 예를 들어, 붐(32)의 모든 구성에서, 가요성 붐(32)은 예를 들어 연속적인 열, 전기, 전력 및 RF 연결을 허용한다. 위성(12)의 이러한 측면은 각각의 페이로드 사이에서 연장되는 힌지 연결을 갖는 종래의 위성과 비교하여 미션 유틸리티를 크게 증가시킨다.
이제 도 4 내지 도 7을 살펴보면, 페이로드(30)는 본 명세서에서 해제 메커니즘으로도 지칭되는 각각의 부착 메커니즘(80)에 의해 각각의 포트(26)에 각각 부착된다. 각각의 부착 메커니즘(80)은 각각의 페이로드(30)의 부착 부분(82)을 각각의 포트(26)의 림(40)에 물리적으로 결합시킨다. 허브(14)로부터 분리될 때 가요성 붐(32)으로부터 분리된 페이로드(30)로 전달될 수 있는 예하 중 변형 에너지를 고려하면, 위성(12)은 2 개의 페이로드(30)를 부착 허브(14)에 부착하기 위한 2 개의 복잡한 부착 메커니즘(80)을 포함할 필요는 없다. 오히려, 위성(12)은 하나의 복잡한 부착 메커니즘(106) 및 하나의 비 복합, 비 이국적 부착 메커니즘(84)을 포함할 수 있으며, 차이점은 더 상세히 설명될 것이다.
예를 들어, 부착 메커니즘(84)은 일반적으로 광대역과 같은 대안적인 복잡한 이국적인 부착 메커니즘보다 더 적은 수의 구성 요소 및 작동된 부분, 더 낮은 전력 요구 및 비용을 갖는다. 도시된 위성(12)은 비용이 덜 들 수도 있는 적어도 하나의 비 복잡, 비 이국적인 부착 메커니즘(84)을 포함한다. 비 복합 부착 메커니즘(84)은 각각의 페이로드(30)의 각각의 부착 부(82)에 부착될 수 있다. 다른 실시 예들에서, 비 복잡한 부착 메커니즘(84)은 위성(12)을 부착 허브(14)에 부착하기 전에 부착 허브(14)의 각각의 포트(26)에 초기에 부착되는 것과 같이 위성(12)과 분리될 수 있다.
도 4 내지 도 6을 구체적으로 참조하면, 예시적인 비 복합 부착 메커니즘(84)이 도시되어 있다. 부착 메커니즘(84)은 부착 허브(14)로부터 바깥쪽으로 페이로드(30)를 외부로 배치할 페이로드(30)에 힘을 가하지 않고 부착 허브(14)로부터 각각의 페이로드(30)를 분리 가능하게 해제하도록 구성된다. 오히려, 변형된 배럴 링과 같은 메커니즘(84)은 단지 각각의 림(40) 및 각각의 부착 부분(82)의 부착을 해제하도록 분리되도록 구성된다. 하나의 예시적인 메커니즘(84)이 도시되어 있지만, 일부 실시 예에서 대안적인 메커니즘이 적합할 수 있다.
예시적인 메커니즘(84)은 2 개의 분리 가능한 반부(85)를 포함한다. 각각의 반부(85)는 반원형 형상을 갖는 스트랩(86), 및 스트랩(86)으로부터 반경 방향 내측으로 연장되는 슬롯 형 세그먼트(88)를 포함한다. 슬롯 형 세그먼트(88)는 스트랩(86)에 임의의 적절한 수단에 의해 일체형이거나 다른 방식으로 부착될 수 있다. 반부(85)는 연결부(92)를 형성하기 위해 연결되는 한 세트의 피팅(94)을 각각 포함하는 연결부(92)에 의해 서로 연결될 수 있다. 도시된 메커니즘(84)은 메커니즘(84)의 환형 형상에 대해 원주 방향 대향 위치에 대향 배치된 한 쌍의 연결부(92)를 포함한다. 각각의 연결부(92)의 피팅(94)은 스트랩(86) 및 각각의 절반(85)의 슬롯 형 세그먼트(88)에 의해 다른 연결부(92)의 피팅(94)에 연결된다. 결합 부(96)는 각각의 연결부(92)의 피팅(94) 사이에서 연장된다. 결합 부(96)의 하나 또는 양쪽 단부의 해제는 반부(85)를 서로 분리하여 페이로드(30)와 포트(26)의 분리를 제공한다.
보다 구체적으로, 슬롯 형 세그먼트(88)는 축 방향으로 인접한 환형 링(98, 100)을 수용 및 유지하도록 구성된다. 환형 링(98 및 100) 중 하나는 림(40) 또는 부착 부분(82) 중 하나에 일체형이거나 또는 다른 방식으로 부착될 수 있고, 환형 링(98, 100) 중 다른 하나는 림(40) 또는 부착 부분(82) 중 다른 하나와 일체형이거나 다른 방식으로 부착된다. 환형 링(98 및 100)의 방사상 외부 키(102 및 104)는 각각 슬롯 형 세그먼트(88) 내로 수용되도록 성형된다. 슬롯 형 세그먼트(88)는 V 자형이고, 환형 링(98, 100)의 반경 방향 외측 키(102, 104)는 함께 대응하는 V 자형을 형성한다. 일부 실시 예에서, 키 및 슬롯은 임의의 다른 적절한 대응 형상을 가질 수 있다.
부착 메커니즘(84)의 연결부(92) 중 하나 또는 둘 모두의 해제는 페이로드(30)와 포트(26)의 분리를 제공하고, 슬롯 형 세그먼트(88)에 의해 서로 인접하게 유지되지 않을 때 환형 링(98 및 100)이 서로 분리될 수 있게 한다. 연결부(92)의 해제는 예를 들어 기계, 전자 기계 또는 화학과 같은 임의의 적절한 방법에 의해 이루어질 수 있다.
도 7을 참조하면, 다른 페이로드(30)는 전형적인보다 복잡한 부착 메커니즘(106)에 의해 부착 허브(14)의 각각의 포트(26)에 부착된다. 보다 복잡한 부착 메커니즘(106)은 각각의 페이로드(30)의 부착 부분(82)을 각각의 포트(26)의 림(40)과 결합시킨다. 도시된 위성(12)은 각각의 페이로드(30)의 각각의 부착 부분(82)에 부착된 부착 메커니즘(106)을 포함한다. 다른 실시 예들에서, 복잡한 부착 메커니즘(106)은 위성(12)을 부착 허브(14)에 부착하기 전에 부착 허브(14)의 각각의 포트(26)에 초기에 부착되는 것과 같이 위성(12)으로부터 분리될 수 있다.
이제 도 7 내지 도 10을 참조하면, 부착 허브(14)로부터 위성(12)의 배치는 순서대로 도시되어 있다. 부착 메커니즘(80)은 순차적으로 해제되며, 부착 메커니즘(84)은 부착 메커니즘(106) 이전에 해제된다.
도 7에서, 위성(12)은 부착 허브(14)에 부착된다. 부착 메커니즘(84) 및 부착 메커니즘(106)을 포함하는 각각의 부착 메커니즘(80)은 한 쌍의 페이로드(30)의 각각의 페이로드(30)의 각각의 부착 부분(82)과 맞물리거나 적어도 인접한 림(40)을 유지한다. 가요성 붐(32)은 그 편향된 상태로 구부러져서, 적어도 하나의 페이로드(30)의 배치에 적합한 가요성 붐(32)에 예-하중 힘 또는 변형 에너지를 형성한다. 예-하중은 일반적으로 부착/해제 메커니즘(106)과 같은 복잡한 해제 메커니즘에 의해 전형적으로 제공되는 힘을 제공한다.
도 8에서, 연결부(92)는 해제되어 부착 메커니즘(84)을 해제한다. 페이로드(30a)의 부착 부분(82)은 부착 부분(82)이 부착된 포트(26a)의 각각의 림(40)으로부터 분리된다. 부착 부분(82)의 해제는 가요성 붐(32)이 저장된 변형 에너지를 굽히지 않고 해제할 수 있게 한다. 가요성 붐(32)의 편향된 위치로부터 기본 위치로의 전이는 페이로드(30a)가 부착 허브(14)로부터 외부로 멀어지게 이동하는 것을 가능하게 한다. 붐(32)을 사용하여 부착 허브(14)로부터의 페이로드(30a)의 배치에 영향을 미치므로, 포트(26a)에서의 비싸고 복잡한 부착 메커니즘에 대한 필요성이 완전히 제거된다.
도 9에서, 복잡한 부착 메커니즘(106)이 작동되어, 페이로드(30b)가 포트(26b)로부터 바깥쪽으로 배치될 수 있게 한다. 위성(12)은 부착 허브(14)로부터 완전히 분리되고, 부착 허브(14)와 분리되어 기동하기 위한 자유-자유 모드에 있다. 위성(12)은 도 10에서 부착 허브(14)와 별도로 도시되어 있다. 페이로드(30a 및 30b)는 부착 허브(14)와 별개로 위성(12)의 조작 및 사용 동안 붐(32)에 의해 서로 이격되어 유지된다.
요약하면, 위성(12)은 종래의 위성(12)에 비해 많은 이점을 제공한다. 가요성 붐(32)의 사용은 궤도 작동 및 ESPA 부착 허브(14)에서의 적재를 위해 충분히 강성이다. ESPA 인터페이스 포트(26)에서의 힘에 대한 무시할 만한 영향만이 구부러진 붐(32)에 의해 부여된다. 구부러진 붐(32)의 예하중은 부착 허브(14)로부터 한 쌍의 페이로드(30) 중 하나의 페이로드(30)의 신속한 배치를 제공하여 위성(12)을 배치하기 위한 2 개의 복잡한 부착 메커니즘(106)의 필요성을 제거한다. 이러한 제거는 위성(12)을 부착 허브(14)에 부착하는 전체 비용, 부품 수 및 복잡성을 감소시킨다. 가요성 붐(32)은 예하중을 형성하고 각각의 부착 부분(82)을 각각의 포트(26)와 결합시키기 위해 필요한 최소한의 굴곡으로 인해, 페이로드(30a)를 포트(26a)에 수동 부착하는 것과 같은 부착을 복잡하게 하지 않는다. 페이로드(30) 사이의 지속적인 연결을 제공하고 페이로드(30)의 배치 후 짝짓기 필요성을 제거함으로써 더 큰 미션 유틸리티가 가능해진다. 또한, 도 11 내지 도 14에 도시된 바와 같이, 본 발명의 개념은 추가의 가요성 붐(32)을 사용하는 것과 같은 추가의 페이로드(30)를 포함하도록 확장될 수 있다.
이제 도 11 및 도 12를 부분적으로 참조하면, 본 개시는 각각의 부착 허브(14)로부터 위성(12)의 적어도 하나의 페이로드(30)의 수동 배치를 갖는 위성(12)에 대한 설계 방법을 포함한다. 전술한 바와 같이, 도시된 위성(12)은 발사 또는 방출 환경으로 이동하는 동안 부착 허브(14)에 부착되고 운반되는 위성의 강성 요건을 충족시키도록 구성되며, 또한 부착 허브(14)로부터 분리된 해제 환경에서 제어된 움직임을 가능하게 하는 충분히 강성인 자유로이 분리된 위성을 제공한다.
도 11 및 12의 개략도에서, 두 페이로드는 페이로드(30α) 및 페이로드(30ß)로 식별된다. 페이로드(30α)는 비 복합 부착 메커니즘(84)에 의해 부착 허브(14)에 부착되는 반면, 페이로드(30ß)는 복잡한 부착 메커니즘(106)에 의해 부착 허브(14)에 부착된다. 도 11은 위성(12)의 자유, 분리 또는 전개 상태를 2-질량, 하나의 스프링 시스템으로서 도시한다. 도 12는 위성(12)의 적재 또는 부착된 상태를 2-질량, 3 스프링 시스템으로서 도시하고, 추가의 2 개의 스프링은 부착 메커니즘(84 및 106)이다.
도 11의 전개된 시스템은 식 1로 나타낼 수 있는 고유 주파수를 가지며, ωn 은 고유 주파수이고, K32는 붐(32)의 스프링 상수이며, mα 및 mß 는 한 쌍의 페이로드(30)의 결합된 페이로드(30α 및 30ß)의 질량을 나타낸다. 수학식 1과 관련하여, 페이로드(30α 및 30ß)의 질량은 일부 실시 예에서 동일하다고 가정될 수 있다.

도 12의 적재된 시스템은 수학식 2 및 3으로 표시되는 제2 및 더 높은 주파수(ω2)를 갖는다. 다시, 이러한 방정식에서, 페이로드(30α 및 30ß)의 질량은 일부 실시 예에서 동일하다고 가정될 수 있으며, 따라서 m은 mα 또는 mß 중 하나를 나타낸다. 적어도 식 2 및 3에 대해, 비 복합 부착 메커니즘(84)의 스프링 상수(K84)와 복합 부착 메커니즘(106)의 스프링 상수(K106)는 일부 실시 예에서 동일하다고 가정될 수 있고, 따라서 K는 K84 또는 K106 중 하나를 나타낸다.


또한, 위성(12)의 적재 상태, 따라서 붐(32)의 편향된 상태에서, 붐(32)의 강성은 수학식 4를 통해 목표 고유 주파수로부터 도출된다. 부착 메커니즘(84)의 해제 후 부착 허브(14)로부터의 페이로드(30) 중 하나의 수동 해제를 제공하는 붐(32)의 예하중(FPL)은 식 5로 표현된다. 수학식 5에서, △Rα 는 예 하중 힘의 해제 시 부착 허브(14)로부터 외부로의 각각의 페이로드(30)의 편향 거리이다.
상기 제공된 수학식 1 내지 5에 관련하여, 3 개의 위성 실시 예의 관련 치수 및 특성이 하기 표 1에 제공된다. 예를 들어, 상이한 실시 예는 상이한 직경 및 개수의 포트(26)(즉, 포트(26) 사이의 상이한 원주 간격)를 갖는 상이한 부착 허브(14)와 함께 사용될 수 있는 위성(12)의 양태를 나타낸다.

위성(12)을 부착 허브(14)에 부착할 수 있도록 위성(12)을 구부리는 것을 고려하면, 위성(12)은 각각의 페이로드(30)가 부착된 각각의 포트(26) 중 적어도 하나에 토크를 가할 것이다. 복잡한 부착 메커니즘(106)이 토크를 제공하지 않거나 K106이 무기한으로 단단하다는 가정이 있는 경우, 예시적인 붐(32)은 부착 메커니즘(84) 및 페이로드(30α)에 부착된 림(40)에 토크를 부여할 것이다.
표 1의 실시예 3의 예시적인 경우(K84≠ K106의 추가 가정), 부착 메커니즘(84)에 부착된 각각의 림(40) 상의 토크는 약 5 Nm 내지 약 35 Nm의 범위, 또는 약 10 Nm 내지 약 30 Nm의 범위, 또는 약 20 Nm 내지 약 25 Nm의 범위, 예컨대 약 21 Nm 일 수 있다.
표 1의 실시예 3의 동일한 변형된 예시적인 경우에서, 환형 ESPA- 부착 허브(14)의 림(40)에 지정된 토크 능력은 약 1.2 x 103 Nm이고, 가요성 붐(32)으로부터의 부여된 토크는 사양을 통해 림(40)에서 허용되는 토크의 약 1 % 내지 약 5 % 이하일 수 있다. 예를 들어, 토크는 허용 토크의 약 1.5 % 내지 약 3 %, 또는 허용 토크 능력의 약 1.7 %의 범위일 수 있다.
이제 도 13 내지 16으로 가면, 다른 예시적인 위성이 112에 도시되어 있다. 위성(112)은 위성(12)을 지칭하는데 사용된 동일한 참조 번호를 사용하지만, 100으로 색인화된다. 또한, 위성(12)의 전술한 설명은 후술하는 것을 제외하고는 위성(112)에 동일하게 적용 가능하다. 또한, 위성(12 및 112)의 양태는 서로 대체될 수 있거나 적용 가능한 경우 서로 연계하여 사용될 수 있다는 사양을 읽고 이해하면 이해될 것이다.
먼저 도 13을 참조하면, 위성(112)이 부착 허브(114)에 부착된 것으로 도시되어 있다. 위성(112)은 복수의 페이로드(130) 및 복수의 가요성 붐(132)을 포함한다. 본 발명에 따른 위성(112)은 가요성 붐(132)에 의해 서로 연결된 2 개의 초기 페이로드(130)를 포함할 수 있고, 추가의 페이로드(130)는 초기 페이로드(130)에 직렬로 연결되고 추가적인 가요성 붐(132)에 의해 연결된다.
도시된 위성(112)은 인접한 페이로드(130)가 가요성 붐(132)에 의해 직렬로 서로 연결된 3 개의 페이로드(130)를 포함한다. 페이로드(130)는 각각 동일한 체적을 갖는 것으로 도시되어 있지만, 그 체적은 일부 실시 예에서 상이할 수 있다. 마찬가지로, 가요성 붐(132)은 동일한 것으로 도시되어 있지만, 붐(132)은 다른 실시 예에서 형상, 크기, 길이 또는 비율 중 임의의 하나 이상에서 상이할 수 있다.
도 13 내지 15에서, 위성(112)은 부착 허브(114)에 부착된다. 2 개의 비 복합 부착 메커니즘(184) 및 하나의 부착 메커니즘(206)은 각각의 페이로드(130)의 각각의 부착 부분(182)과 맞물리거나 적어도 인접한 림(140)을 유지한다. 가요성 붐(132)은 각각의 편향된 상태로 구부러져 있다. 부착 메커니즘(184)은 부착 허브(114)로부터 외부 페이로드(130a, 130c)를 분리하기 위해 이용된다.
부착 허브(114)로부터 위성(112)을 전개하기 위해, 부착 메커니즘(180)은 포트(126a, 126c)에서의 부착 메커니즘(184)가 포트(126b)에서의 부착 메커니즘(206) 이전에 각각 해제된 상태로 순차적으로 해제된다. 부착 메커니즘(184)은 동시에 해제될 수 있거나, 하나는 다른 것의 해제 전에 해제될 수 있다.
예를 들어, 두 개의 부착 메커니즘(184)의 연결(도 5의 연결부(92)와 동일)이 해제되면, 이에 의해 부착 메커니즘(184)을 해제함으로써, 페이로드(130a 및 130c)의 부착 부분(182)은 부착 부분(182)이 부착된 포트(126a 및 126c)의 각각의 림(140)으로부터 분리된다. 부착 부분(182)의 해제는 가요성 붐(132)이 저장된 변형 에너지를 휨 및 해제할 수 있게 한다. 가요성 붐(132)의 편향된 위치로부터 기본 위치로의 전이는 페이로드(130a 및 130c)가 부착 허브(114)로부터 바깥쪽으로 이동할 수 있게 한다. 붐(132)을 사용하여 부착 허브(114)로부터 페이로드(130a 및 130c)의 배치에 영향을 미치므로, 포트(126a 및 126c)에서의 고가의 복잡한 부착 메커니즘에 대한 필요성이 완전히 제거된다.
도 16에서, 복잡한 부착 메커니즘(206)(도 15)이 또한 작동되어, 페이로드(130b)가 포트(126b)로부터 외향으로 배치될 수 있게 한다. 위성(112)은 부착 허브(114)로부터 완전히 분리된다. 페이로드(130a, 130b, 130c)는 위성(112)의 조작 및 사용 동안 붐(132)에 의해 서로 이격되어 유지된다.
일부 실시 예들에서, 부착 메커니즘(184)이 중간 페이로드(130b)를 분리하는데 사용될 수 있고, 대신 복잡한 부착 메커니즘이 페이로드(130a) 또는 페이로드(130c) 중 하나를 배치하는데 사용될 수 있다. 다른 실시 예들에서, 페이로드(130a) 또는 페이로드(130c) 중 하나만이 비 복합 부착 메커니즘(184)을 통해 부착 허브(114)로부터 분리될 수 있고, 다른 2 개의 페이로드(130)는 복잡한 부착 메커니즘(206)을 통해 배치된다.
여전히 도 13 내지 도 16 뿐만 아니라 도 7 내지 도 10을 참조하면, 본 발명은 부착 허브(14, 114)로부터 위성(12, 112)을 배치하는 방법을 포함한다. 상기 방법은(a) 가요성 붐(32, 132)이 사이에 연장되고, 각각의 페이로드(30, 130)가 부착 허브(14, 114)에 결합된 한 쌍의 페이로드(30, 130)를 갖는 위성(12, 112)에 제공하는 단계;(b) 부착 허브(14, 114)에 대한 페이로드(30, 130) 중 하나의 결합을 해제하는 단계; 및(c) 가요성 붐(32, 132)을 변형 에너지를 저장한 편향된 상태에서 기본 상태로 전이시키고, 이에 따라 가요성 붐(32, 132)으로부터 저장된 변형 에너지의 방출을 통해 부착 허브(14, 114)로부터 페이로드(30, 130) 중 하나를 외부로 배치하는 단계의 단계들을 포함한다. 상기 방법은 가요성 붐(32, 132)으로부터 저장된 변형 에너지의 방출이 편향된 상태에서 구부러짐으로부터 구부러지지 않는 붐(32, 132)을 포함한다. 상기 방법은(d) 부착 메커니즘(84, 184)없이, 부착 허브(14, 114)로부터 외부로 페이로드(30, 130)를 배치할 페이로드(30, 130)에 힘을 가하면서, 페이로드(30, 130)를 부착 허브(14, 114)에 선택적으로 결합하는 부착 메커니즘(84, 184)을 해제하는 단계를 더 포함할 수 있다.
요약하면, 전술 한 실시 예들 각각을 참조하면, 본 개시는 가요성 붐(32, 132)에 의해 서로 연결된 한 쌍의 페이로드(30, 130)를 포함하는 예시적인 위성(12, 112)을 제공하고, 가요성 붐(32, 132)은 연관된 부착 허브(14, 114)와 한 쌍의 페이로드(30, 130)를 용이하게 수동으로 맞물리도록, 및 또한 부착 허브(14, 114)로부터 바깥 방향으로 적어도 하나의 페이로드(30, 130)를 배치하기 위한 수동 해제 력을 제공하도록 구성된다. 수동 방출을 가능하게 하기 위한 잠재적 에너지는 페이로드(30, 130)를 부착 허브(14, 114)에 부착하기 위해 구부러질 때가요성 붐(32, 132)에 저장된 변형 에너지로서 제공된다. 변형 에너지는 부착 허브(14, 114)로부터 적어도 하나의 페이로드(30, 130)가 방출될 때 방출되며, 이 방출은 비 복합의 비 이국적인 부착 메커니즘(84, 184)에 의해 이루어질 수 있다. 추가의 페이로드(30, 130)는 인접한 페이로드(30, 130)를 연결하는 가요성 붐과 함께 한 쌍의 페이로드(30, 130)에 직렬로 연결될 수 있다. 추가 페이로드(30, 130)는 부착 메커니즘(84, 184)을 통해 또는 복잡한 부착 메커니즘(106, 206)에 의해 부착 허브(14, 114)로부터 해제될 수 있다.
본 발명이 소정의 바람직한 실시 예 또는 실시 예와 관련하여 도시되고 설명되었지만, 본 명세서 및 첨부 도면을 읽고 이해하면 당업자에게 동등한 변경 및 수정이 일어날 수 있음이 명백하다. 특히 상기 기술된 요소들(구성 요소들, 어셈블리들, 상점들, 조성물들 등)에 의해 수행되는 다양한 기능들과 관련하여, 본 명세서에 도시된 예시적인 실시 예 또는 본 발명의 실시 예에서 기능을 수행하는 개시된 구조와 구조적으로 동일하지는 않지만, 이러한 구성 요소를 설명하기 위해 사용된 용어( "수단"에 대한 참조 포함)는, 달리 지시되지 않는 한, 기술된 구성 요소의 특정 기능을 수행하는(즉, 기능적으로 동등한) 임의의 구성 요소에 대응하도록 의도된다. 또한, 본 발명의 특정 특징은 몇몇 도시된 실시 예들 중 하나 이상과 관련하여 위에서 설명되었지만, 이러한 특징은 임의의 주어진 또는 특정 응용에 바람직하고 유리할 수 있는 바와 같이 다른 실시 양태의 하나 이상의 다른 특징과 조합될 수 있다.
Claims (20)
- 한 쌍의 페이로드; 및
각각의 페이로드 사이에서 연장되고 그에 연결된 가요성 붐;
을 포함하고,
위성은 붐을 구부림으로써 부착 허브와 맞물리고 부착 허브로부터 위성의 수동 해제 력을 제공하도록 구성되는,
위성.
- 제1항에 있어서,
수동 해제 력은 부착 허브로부터 바깥쪽으로 적어도 하나의 페이로드를 수동으로 분리시키는,
위성.
- 제1항 또는 제2항에 있어서,
붐의 굴곡은 허브 주위에 서로 이격된 각각의 페이로드의 부착을 허용하는,
위성.
- 제1항 내지 제3항 중 어느 한 항에 있어서,
가요성 붐은 단일 정지 위치를 갖는,
위성.
- 제1항 내지 제4항 중 어느 항 항에 있어서,
가요성 붐은 페이로드 사이에서 비-직선 선형 중심 경로를 따라 연장되는,
위성.
- 제1항 내지 제5항 중 어느 한 항에 있어서,
가요성 붐은 힌지없는 붐인,
위성.
- 제1항 내지 제6항 중 어느 한 항에 있어서,
페이로드 중 적어도 하나는 페이로드를 부착 허브로부터 바깥쪽으로 멀리 배치하기 위해 페이로드에 힘을 가하지 않고 부착 허브로부터 페이로드를 분리하여 해제하도록 구성된 부착 메커니즘을 포함하는,
위성.
- 제1항 내지 제7항 중 어느 한 항에 있어서,
모든 구성의 붐은 페이로드 사이에 지속적인 열, RF 또는 전기 연결을 허용하는,
위성.
- 제1항 내지 제8항 중 어느 한 항에 있어서,
모든 구성의 붐은 페이로드가 서로 물리적으로 결합되지 않도록 구성되는,
위성.
- 제1항 내지 제9항 중 어느 한 항에 있어서,
상기 제 3 페이로드와 상기 한 쌍의 페이로드의 하나의 페이로드 사이에 연장되어 결합되는 제 3 페이로드 및 제 2 가요성 붐을 더 포함하고,
3 개의 페이로드 및 2 개의 가요성 붐을 포함하는 위성은 2 개의 붐을 구부림으로써 부착 허브와 맞물리고 부착 허브로부터 위성의 수동 해제 력을 제공하도록 구성되는,
위성.
- 복수의 포트 및 제1항 내지 제10항 중 어느 한 항에 따른 위성을 갖는 부착 허브를 포함하고, 한 쌍의 페이로드 중 적어도 하나의 페이로드는 포트 중 하나에서 부착 허브에 부착되는,
위성 어셈블리.
- 부착 허브의 포트에 개별적으로 부착하기 위한 부착 부분을 각각 갖는 한 쌍의 페이로드; 및
상기 한 쌍의 페이로드의 각각의 페이로드 사이에서 연장되어 결합되는 붐;
을 포함하고,
상기 붐은 커플링 부재가 저장된 에너지를 갖는, 부착 허브에 부착하기위한 편향된 상태와, 저장된 에너지의 방출 후 부착 허브로부터 외부로 적어도 부분적으로 배치하기 위한 기본 상태 사이에서 전이되도록 구성되는,
위성.
- 제12항에 있어서,
붐이 기본 상태에 있을 때보다 붐이 편향된 상태에 있을 때 페이로드가 서로 더 가깝게 이격되는,
위성.
- 제12항 또는 제13항에 있어서,
붐은 단일 기본 상태를 갖도록 구성되는,
위성.
- 제12항 내지 제14항 중 어느 한 항에 있어서,
모든 상태의 붐은 페이로드 사이에 지속적인 열, RF 또는 전기 연결을 허용하도록 구성되는,
위성.
- 제12항 내지 제15항 중 어느 한 항에 있어서,
모든 상태의 붐은 페이로드가 서로 물리적으로 맞물리지 않도록 구성되는,
위성.
- 제12항 내지 제16항 중 어느 한 항에 있어서,
상기 제 3 페이로드와 상기 한 쌍의 페이로드의 하나의 페이로드 사이에 연장되어 결합되는 제 3 페이로드 및 제 2 붐을 더 포함하고, 상기 제2 붐은 제 2 붐이 저장된 에너지를 갖는, 부착 허브에 부착하기위한 편향된 상태와 저장된 에너지의 방출 후 부착 허브로부터 외부로 적어도 부분적으로 배치하기 위한 기본 상태 사이에 전이되도록 구성되는,
위성.
- 부착 허브에서 위성을 배치하는 방법에 있어서,
한 쌍의 페이로드를 갖고 그 사이에 연장되는 가요성 붐을 구비한 위성을 제공하고, 각각의 페이로드는 부착 메커니즘에 의해 부착 허브에 결합되는 단계;
부착 허브에 대하여 제1의 페이로드를 선택적으로 결합시키는 부착 메커니즘을 해제하는 단계; 및
변형 에너지를 저장한 편향된 상태에서 기본 상태로 가요성 붐을 전이시키고, 그에 따라 가요성 붐으로부터 저장된 변형 에너지의 방출을 통해 부착 허브로부터 제 1의 페이로드를 외부로 배치하는 단계;
를 포함하는, 방법.
- 제18항에 있어서,
가요성 붐으로부터 저장된 변형 에너지의 방출은 편향된 상태로부터 비편향되는 붐을 포함하는, 방법.
- 제18항 또는 제19항에 있어서,
커플링 부재가 제 1의 페이로드를 부착 허브로부터 바깥쪽으로 배치하는 제 1의 페이로드에 힘을 가하지 않고, 상기 제 1의 페이로드를 상기 부착 허브에 선택적으로 결합시키는 부착 메커니즘을 해제하는 단계를 더 포함하는, 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/827,524 US10773835B2 (en) | 2017-11-30 | 2017-11-30 | Flexible satellite for deployment from attachment hub |
| US15/827,524 | 2017-11-30 | ||
| PCT/US2018/044467 WO2019108272A1 (en) | 2017-11-30 | 2018-07-31 | Flexible satellite for deployment from attachment hub |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200086740A true KR20200086740A (ko) | 2020-07-17 |
Family
ID=63245051
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207018431A Withdrawn KR20200086740A (ko) | 2017-11-30 | 2018-07-31 | 부착 허브로부터 배치하기 위한 가요성 위성 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10773835B2 (ko) |
| EP (1) | EP3717358A1 (ko) |
| JP (1) | JP2021504232A (ko) |
| KR (1) | KR20200086740A (ko) |
| CN (1) | CN111655582A (ko) |
| RU (1) | RU2020119537A (ko) |
| WO (1) | WO2019108272A1 (ko) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102340345B1 (ko) * | 2015-12-18 | 2021-12-17 | 에어버스 디펜스 앤드 스페이스, 에스.아. | 페이로드 어댑터 링 |
| US11214388B2 (en) * | 2019-01-09 | 2022-01-04 | Raytheon Company | Self-contained payload accommodation module |
| US11208217B1 (en) * | 2019-04-08 | 2021-12-28 | United States Of America As Represented By The Administrator Of Nasa | SmallSat platform with standard interfaces |
| US20210122502A1 (en) * | 2019-10-25 | 2021-04-29 | Momentus Inc. | Launch and Flight Configurations for Transfer Space Vehicles |
| US11787570B2 (en) * | 2020-08-06 | 2023-10-17 | Raytheon Company | Multi-part Marman band clamp with retainer |
| US11780611B2 (en) * | 2020-09-16 | 2023-10-10 | Maxar Space Llc | Spacecraft with universal external port |
| CN112173172B (zh) * | 2020-10-16 | 2026-01-06 | 浙江清华柔性电子技术研究院 | 柔性卫星的分离控制方法、装置、计算机设备及存储介质 |
| CN112528544B (zh) * | 2020-12-17 | 2024-07-12 | 中国科学院微小卫星创新研究院 | 小型高轨卫星自串联双星基频指标分解方法 |
| AU2021273575A1 (en) * | 2020-12-17 | 2022-07-07 | The Boeing Company | Satellite thermal enclosure |
| CN114313311B (zh) * | 2022-03-04 | 2022-05-27 | 中国人民解放军战略支援部队航天工程大学 | 一种多体变构卫星的拓扑构型 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3478986A (en) * | 1967-12-06 | 1969-11-18 | Charles P Fogarty | Space delivery system |
| US5052640A (en) * | 1989-08-29 | 1991-10-01 | Hughes Aircraft Company | Spacecraft design enabling the flat packing of multiple spacecraft in the launch vehicle |
| US5242135A (en) | 1990-01-30 | 1993-09-07 | Scott David R | Space transfer vehicle and integrated guidance launch system |
| US6220548B1 (en) | 1998-09-14 | 2001-04-24 | The United States Of America As Represented By The Secretary Of The Navy | Deployed equipment modules for satellite architecture improvement |
| US6206327B1 (en) | 1999-03-31 | 2001-03-27 | Lockheed Martin Corporation | Modular spacecraft bus |
| FR2839949B1 (fr) * | 2002-05-22 | 2005-01-07 | Centre Nat Etd Spatiales | Procede d'assemblage dans l'espace d'un satellite artificiel constitue d'au moins deux modules et dispositif pour sa mise en oeuvre |
| JP5479146B2 (ja) * | 2010-02-19 | 2014-04-23 | 三菱重工業株式会社 | 結合分離装置、結合分離システム、及び結合分離方法 |
| US8550408B2 (en) * | 2010-07-16 | 2013-10-08 | The Boeing Company | Dual evolved expendable launch vehicle (EELV) secondary payload adaptor (ESPA) port small satellite design |
| US8770522B1 (en) * | 2010-12-01 | 2014-07-08 | The United States Of America As Represented By The Secretary Of The Air Force | Deployable space boom using bi-stable tape spring mechanism |
| US9004409B1 (en) * | 2011-08-23 | 2015-04-14 | Space Systems/Loral, Llc | Extendable antenna reflector deployment techniques |
| US8720830B1 (en) | 2012-01-30 | 2014-05-13 | United Launch Alliance, L.L.C. | Efficient solar panel wing-stowage on a space launch vehicle |
| US8789797B2 (en) | 2012-02-23 | 2014-07-29 | Alliant Techsystems Inc. | Payload adapters including antenna assemblies, satellite assemblies and related systems and methods |
| US8939409B2 (en) * | 2012-05-07 | 2015-01-27 | The Johns Hopkins University | Adaptor system for deploying small satellites |
| US8876062B1 (en) * | 2012-10-31 | 2014-11-04 | Space Systems/Loral, Llc | Shape memory alloy pre-loaded deployment hinge |
| FR3004166B1 (fr) | 2013-04-09 | 2015-04-17 | Astrium Sas | Systeme de satellites comportant deux satellites fixes l'un a l'autre et procede pour leur mise en orbite |
| US9732776B2 (en) * | 2014-10-10 | 2017-08-15 | The Boeing Company | Marman clamp with a shape memory alloy actuator |
| US10053243B2 (en) * | 2015-04-22 | 2018-08-21 | The Johns Hopkins University | Release system for deploying satellites |
| EP3100954A1 (de) | 2015-06-04 | 2016-12-07 | Airbus DS GmbH | Rakete mit mehreren stufen |
| US9796488B2 (en) * | 2015-10-02 | 2017-10-24 | The Boeing Company | Dual port payload attach ring compatible satellite |
-
2017
- 2017-11-30 US US15/827,524 patent/US10773835B2/en active Active
-
2018
- 2018-07-31 JP JP2020529632A patent/JP2021504232A/ja not_active Withdrawn
- 2018-07-31 CN CN201880087811.6A patent/CN111655582A/zh active Pending
- 2018-07-31 KR KR1020207018431A patent/KR20200086740A/ko not_active Withdrawn
- 2018-07-31 RU RU2020119537A patent/RU2020119537A/ru unknown
- 2018-07-31 EP EP18756059.4A patent/EP3717358A1/en not_active Withdrawn
- 2018-07-31 WO PCT/US2018/044467 patent/WO2019108272A1/en not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| RU2020119537A3 (ko) | 2021-12-30 |
| EP3717358A1 (en) | 2020-10-07 |
| WO2019108272A1 (en) | 2019-06-06 |
| JP2021504232A (ja) | 2021-02-15 |
| CN111655582A (zh) | 2020-09-11 |
| RU2020119537A (ru) | 2021-12-30 |
| US20190161215A1 (en) | 2019-05-30 |
| US10773835B2 (en) | 2020-09-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200086740A (ko) | 부착 허브로부터 배치하기 위한 가요성 위성 | |
| CN114644140B (zh) | 卫星设备、卫星组件及从发射载具部署卫星的方法 | |
| EP3153412B1 (en) | Dual port payload attach ring compatible satellite | |
| CN103387058B (zh) | 多航天器发射系统 | |
| CN108137172B (zh) | 包括形成堆的立柱的航天器,包括放在发射器中安放至少两个这种航天器的堆,以及空投航天器的方法 | |
| EP1104392B1 (en) | Multiple spacecraft carrier on launcher | |
| EP2407384B1 (en) | Dual evolved expendable launch vehicle (EELV) secondary payload adaptor (ESPA) port small satellite design | |
| US8720830B1 (en) | Efficient solar panel wing-stowage on a space launch vehicle | |
| US10633123B2 (en) | Exoskeletal launch support structure | |
| JP2014530144A (ja) | 推進ベイ | |
| US11827385B2 (en) | Direct mount of secondary payload adapters to truss structure common to space vehicle payload adapter | |
| WO2012011965A2 (en) | Capsule system, service module, and reuseable reentry payload and docking module | |
| EP2837568B1 (en) | Spacecraft and adapter structure therefore | |
| US11891196B2 (en) | Spacecraft systems and methods | |
| KR102340345B1 (ko) | 페이로드 어댑터 링 | |
| CN116534279B (zh) | 卫星轨道部署器及其组件 | |
| EP4524040A1 (en) | Toroidal tank and space vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200625 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| PC1202 | Submission of document of withdrawal before decision of registration |
Comment text: [Withdrawal of Procedure relating to Patent, etc.] Withdrawal (Abandonment) Patent event code: PC12021R01D Patent event date: 20210427 |
|
| WITB | Written withdrawal of application |