KR20200087543A - 3차원 데이터 부호화 방법 및 장치 및 3차원 데이터 복호화 방법 및 장치 - Google Patents
3차원 데이터 부호화 방법 및 장치 및 3차원 데이터 복호화 방법 및 장치 Download PDFInfo
- Publication number
- KR20200087543A KR20200087543A KR1020190003953A KR20190003953A KR20200087543A KR 20200087543 A KR20200087543 A KR 20200087543A KR 1020190003953 A KR1020190003953 A KR 1020190003953A KR 20190003953 A KR20190003953 A KR 20190003953A KR 20200087543 A KR20200087543 A KR 20200087543A
- Authority
- KR
- South Korea
- Prior art keywords
- image
- data
- information
- occupancy map
- occupancy
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T9/00—Image coding
- G06T9/001—Model-based coding, e.g. wire frame
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three-dimensional [3D] modelling for computer graphics
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three-dimensional [3D] modelling for computer graphics
- G06T17/20—Finite element generation, e.g. wire-frame surface description, tesselation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T9/00—Image coding
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T9/00—Image coding
- G06T9/40—Tree coding, e.g. quadtree, octree
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/117—Filters, e.g. for pre-processing or post-processing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/184—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being bits, e.g. of the compressed video stream
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/44—Decoders specially adapted therefor, e.g. video decoders which are asymmetric with respect to the encoder
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/46—Embedding additional information in the video signal during the compression process
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/46—Embedding additional information in the video signal during the compression process
- H04N19/463—Embedding additional information in the video signal during the compression process by compressing encoding parameters before transmission
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/597—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding specially adapted for multi-view video sequence encoding
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Signal Processing (AREA)
- Computer Graphics (AREA)
- Geometry (AREA)
- Software Systems (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
일 실시 예에 따른 3차원 데이터 부호화 방법은, 3차원 데이터에 포함되는 포인트들을 2D 평면 상에 프로젝션함으로써, 상기 포인트들의 위치 정보를 나타내는 기하학 영상, 상기 포인트들의 색상 정보를 나타내는 텍스쳐 영상, 및 상기 기하학 영상 내에서 상기 포인트들의 위치 정보의 점유 정보를 나타내는 점유 맵을 생성하는 단계; 상기 점유 맵에 대한 필터링을 수행함으로써, 필터링된 점유 맵을 생성하는 단계; 상기 필터링된 점유 맵에 기초하여, 상기 기하학 영상 및 상기 텍스쳐 영상을 필터링하는 단계; 및 필터링된 기하학 영상, 필터링된 텍스쳐 영상 및 다운 샘플링된 점유 맵 및 상기 점유 맵에 대해서 수행된 필터링에 대한 정보가 포함된 비트 스트림을 생성하고 출력하는 단계를 포함할 수 있다.
Description
도 2 및 도 3은 3차원 데이터를 평면 상에 프로젝션(project)함으로써 생성되는 2차원 영상을 도시한다.
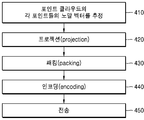
도 4는 일 실시 예에 따라 3차원 데이터를 부호화하고 전송하는 방법의 흐름도를 도시한다.
도 5는 일 실시 예에 따른 3차원 데이터 부호화 장치의 블록도를 도시한다.
도 6은 일 실시 예에 따른 이미지 패딩을 설명하기 위한 도면이다.
도 7은 소스 데이터로부터 프로젝션된 포인트들을 나타내는 점유 맵과 점유 정밀도(occupancy precision)가 4인 경우에 대응 되는 점유 맵을 도시한다.
도 8은 다운 샘플링된 점유 맵에 의해 불필요한 정보가 추가된 텍스쳐 영상을 도시한다.
도 9는 일 실시 예에 따라 점유 맵에 대해 오버샘플링 및 필터링을 수행하는 과정을 설명하기 위한 도면이다.
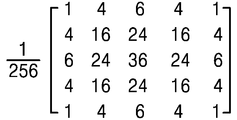
도 10은 일 실시 예에 따른 2D 필터링에 이용되는 필터의 예를 도시한다.
도 11은 일 실시 예에 따른 3차원 데이터 복호화 장치의 블록도를 도시한다.
Claims (2)
- 3차원 데이터에 포함되는 포인트들을 2D 평면 상에 프로젝션함으로써, 상기 포인트들의 위치 정보를 나타내는 기하학 영상, 상기 포인트들의 색상 정보를 나타내는 텍스쳐 영상, 및 상기 기하학 영상 내에서 상기 포인트들의 위치 정보의 점유 정보를 나타내는 점유 맵을 생성하는 단계;
상기 점유 맵에 대한 필터링을 수행함으로써, 필터링된 점유 맵을 생성하는 단계;
상기 필터링된 점유 맵에 기초하여, 상기 기하학 영상 및 상기 텍스쳐 영상에 대한 이미지 패딩을 수행하는 단계; 및
패딩된 기하학 영상, 패딩된 텍스쳐 영상 및 다운 샘플링된 점유 맵 및 상기 점유 맵에 대해서 수행된 필터링에 대한 정보가 포함된 비트 스트림을 생성하고 출력하는 단계를 포함하는, 3차원 데이터 부호화 방법. - 비트스트림을 수신하는 단계;
상기 비트스트림으로부터 텍스쳐 영상, 기하학 영상, 점유 맵 및 필터링 정보를 획득하는 단계;
상기 필터링 정보에 기초하여 상기 점유 맵에 대한 필터링을 수행함으로써, 필터링된 점유 맵을 생성하는 단계;
상기 기하학 영상 및 상기 필터링된 점유 맵에 기초하여 포인트들의 위치 정보를 복원하는 단계; 및
상기 텍스쳐 영상에 기초하여, 상기 위치 정보가 복원된 포인트들의 색상 정보를 복원함으로써, 3차원 데이터를 재구성하는 단계를 포함하는, 3차원 데이터 복호화 방법.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190003953A KR102640235B1 (ko) | 2019-01-11 | 2019-01-11 | 3차원 데이터 부호화 방법 및 장치 및 3차원 데이터 복호화 방법 및 장치 |
| US17/421,704 US12217464B2 (en) | 2019-01-11 | 2020-01-13 | Three-dimensional data encoding method and device, and three-dimensional data decoding method and device |
| EP20738151.8A EP3889909B1 (en) | 2019-01-11 | 2020-01-13 | Three-dimensional data encoding method and device, and three-dimensional data decoding method and device |
| CN202080013718.8A CN113424225B (zh) | 2019-01-11 | 2020-01-13 | 三维数据编码方法和设备以及三维数据解码方法和设备 |
| PCT/KR2020/000595 WO2020145783A1 (ko) | 2019-01-11 | 2020-01-13 | 3차원 데이터 부호화 방법 및 장치 및 3차원 데이터 복호화 방법 및 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190003953A KR102640235B1 (ko) | 2019-01-11 | 2019-01-11 | 3차원 데이터 부호화 방법 및 장치 및 3차원 데이터 복호화 방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200087543A true KR20200087543A (ko) | 2020-07-21 |
| KR102640235B1 KR102640235B1 (ko) | 2024-02-23 |
Family
ID=71520290
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190003953A Active KR102640235B1 (ko) | 2019-01-11 | 2019-01-11 | 3차원 데이터 부호화 방법 및 장치 및 3차원 데이터 복호화 방법 및 장치 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12217464B2 (ko) |
| EP (1) | EP3889909B1 (ko) |
| KR (1) | KR102640235B1 (ko) |
| CN (1) | CN113424225B (ko) |
| WO (1) | WO2020145783A1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102403501B1 (ko) * | 2020-12-10 | 2022-05-30 | 한밭대학교 산학협력단 | 3차원 데이터 부호화 방법 및 장치 |
| KR102454861B1 (ko) | 2022-05-23 | 2022-10-14 | 주식회사 위딧 | 복호화 키 기반의 3차원 파일의 보안 시스템 및 방법 |
| KR20230165398A (ko) | 2022-05-27 | 2023-12-05 | 주식회사 위딧 | 3d 에셋 플랫폼을 위한 nft의 메타 데이터 관리 시스템 및 방법 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20240070924A1 (en) * | 2020-12-21 | 2024-02-29 | Koninklijke Kpn N.V. | Compression of temporal data by using geometry-based point cloud compression |
| CN114915795B (zh) * | 2021-02-08 | 2024-04-30 | 荣耀终端有限公司 | 基于二维规则化平面投影的点云编解码方法及装置 |
| CN116800969A (zh) * | 2022-03-18 | 2023-09-22 | 维沃移动通信有限公司 | 编码、解码方法、装置及设备 |
| US20240404112A1 (en) * | 2023-06-02 | 2024-12-05 | Apple Inc. | Smooth video/image signal compression |
| WO2025184800A1 (zh) * | 2024-03-05 | 2025-09-12 | Oppo广东移动通信有限公司 | 点云编解码方法、编解码器、码流以及存储介质 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8290305B2 (en) | 2009-02-13 | 2012-10-16 | Harris Corporation | Registration of 3D point cloud data to 2D electro-optical image data |
| US9811880B2 (en) | 2012-11-09 | 2017-11-07 | The Boeing Company | Backfilling points in a point cloud |
| US11300964B2 (en) | 2016-12-20 | 2022-04-12 | Korea Advanced Institute Of Science And Technology | Method and system for updating occupancy map for a robotic system |
| KR101949609B1 (ko) * | 2016-12-20 | 2019-02-19 | 한국과학기술원 | 대표 광선 기반의 점유맵 업데이트 방법 및 시스템 |
| US11514613B2 (en) * | 2017-03-16 | 2022-11-29 | Samsung Electronics Co., Ltd. | Point cloud and mesh compression using image/video codecs |
| EP3399757A1 (en) | 2017-05-04 | 2018-11-07 | Thomson Licensing | Method and apparatus to encode and decode two-dimension point clouds |
| US10444761B2 (en) | 2017-06-14 | 2019-10-15 | Trifo, Inc. | Monocular modes for autonomous platform guidance systems with auxiliary sensors |
| WO2019197708A1 (en) * | 2018-04-09 | 2019-10-17 | Nokia Technologies Oy | An apparatus, a method and a computer program for volumetric video |
| US10939129B2 (en) * | 2018-04-10 | 2021-03-02 | Apple Inc. | Point cloud compression |
| KR102503743B1 (ko) | 2018-04-11 | 2023-02-28 | 삼성전자주식회사 | 이미지 처리 장치 및 방법 |
| EP3777182B1 (en) * | 2018-04-11 | 2025-07-30 | InterDigital VC Holdings, Inc. | A method and apparatus for encoding/decoding a point cloud representing a 3d object |
| US11012713B2 (en) * | 2018-07-12 | 2021-05-18 | Apple Inc. | Bit stream structure for compressed point cloud data |
| JP2022003716A (ja) * | 2018-10-01 | 2022-01-11 | ソニーグループ株式会社 | 画像処理装置および方法 |
| CN113261297B (zh) * | 2019-01-07 | 2024-12-31 | 索尼集团公司 | 图像处理装置和方法 |
-
2019
- 2019-01-11 KR KR1020190003953A patent/KR102640235B1/ko active Active
-
2020
- 2020-01-13 WO PCT/KR2020/000595 patent/WO2020145783A1/ko not_active Ceased
- 2020-01-13 US US17/421,704 patent/US12217464B2/en active Active
- 2020-01-13 EP EP20738151.8A patent/EP3889909B1/en active Active
- 2020-01-13 CN CN202080013718.8A patent/CN113424225B/zh active Active
Non-Patent Citations (1)
| Title |
|---|
| C. Guede 외 5명, "Improve point cloud compression through occupancy map refinement," Document ISO/IEC JTC1/SC29/WG11 MPEG2018/ m44779, Macao, China, 2018.10.04. 1부.* * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102403501B1 (ko) * | 2020-12-10 | 2022-05-30 | 한밭대학교 산학협력단 | 3차원 데이터 부호화 방법 및 장치 |
| KR102454861B1 (ko) | 2022-05-23 | 2022-10-14 | 주식회사 위딧 | 복호화 키 기반의 3차원 파일의 보안 시스템 및 방법 |
| KR20230165398A (ko) | 2022-05-27 | 2023-12-05 | 주식회사 위딧 | 3d 에셋 플랫폼을 위한 nft의 메타 데이터 관리 시스템 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113424225B (zh) | 2025-03-07 |
| KR102640235B1 (ko) | 2024-02-23 |
| WO2020145783A1 (ko) | 2020-07-16 |
| EP3889909A1 (en) | 2021-10-06 |
| US20220084254A1 (en) | 2022-03-17 |
| US12217464B2 (en) | 2025-02-04 |
| EP3889909B1 (en) | 2023-10-04 |
| EP3889909A4 (en) | 2022-05-25 |
| CN113424225A (zh) | 2021-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102640235B1 (ko) | 3차원 데이터 부호화 방법 및 장치 및 3차원 데이터 복호화 방법 및 장치 | |
| US11979607B2 (en) | Apparatus and method for processing point cloud data | |
| CN114009027B (zh) | 视频译码中的残差的量化 | |
| KR20200044661A (ko) | 영상의 ai 부호화 및 ai 복호화 방법, 및 장치 | |
| KR20210096285A (ko) | 3차원 메쉬 컨텐트를 압축하기 위한 방법, 장치 및 컴퓨터 판독 가능한 기록 매체 | |
| KR20200044653A (ko) | 딥 뉴럴 네트워크를 이용한 영상의 ai 부호화 및 ai 복호화 방법, 및 장치 | |
| WO2020012187A1 (en) | Method and system for compressing and decompressing digital three-dimensional point cloud data | |
| US12536710B2 (en) | Dynamic mesh coding with simplified topology | |
| KR20200044662A (ko) | 영상의 ai 부호화 및 ai 복호화를 위한 장치, 및 방법 | |
| CN110495178A (zh) | 3d视频编码的装置和方法 | |
| EP4383708A1 (en) | Device and method for ai-based filtering of image | |
| CN115643406A (zh) | 视频解码方法、视频编码方法、装置、存储介质及设备 | |
| EP4633165A1 (en) | 3d data transmission apparatus, 3d data transmission method, 3d data reception apparatus, and 3d data reception method | |
| US11887342B2 (en) | Method and device for encoding three-dimensional image, and method and device for decoding three-dimensional image | |
| KR20250059445A (ko) | 3d 데이터 송신 장치, 3d 데이터 송신 방법, 3d 데이터 수신 장치 및 3d 데이터 수신 방법 | |
| US20230412837A1 (en) | Point cloud data transmission method, point cloud data transmission device, point cloud data reception method, and point cloud data reception device | |
| KR20250161596A (ko) | 3d 데이터 송신 장치, 3d 데이터 송신 방법, 3d 데이터 수신 장치 및 3d 데이터 수신 방법 | |
| KR20200144401A (ko) | 3차원 데이터를 압축하는 방법 및 장치 및 3차원 데이터를 재구성하는 방법 및 장치 | |
| US20220084253A1 (en) | Method and device for compressing three-dimensional data, and method and device for reconstructing three-dimensional data | |
| KR102421718B1 (ko) | 인공지능 부호화 및 인공지능 복호화를 수행하기 위한 방법 및 장치 | |
| KR101581131B1 (ko) | 영상 정보를 전달하는 방법, 영상 부호기 및 영상 복호기 | |
| CN121420558A (zh) | 网格数据发送设备、网格数据发送方法、网格数据接收设备和网格数据接收方法 | |
| CN121794980A (zh) | 点云数据发送设备、点云数据发送方法、点云数据接收设备和点云数据接收方法 | |
| CN121909649A (zh) | 网格数据发送设备、网格数据发送方法、网格数据接收设备和网格数据接收方法 | |
| US20210385501A1 (en) | Weighted downsampling and weighted transformations for signal coding |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20190111 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20220111 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20190111 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20230515 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20231120 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20240220 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20240221 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |