KR20200089966A - 수중 운동체의 회수 시스템 및 방법 - Google Patents
수중 운동체의 회수 시스템 및 방법 Download PDFInfo
- Publication number
- KR20200089966A KR20200089966A KR1020190006908A KR20190006908A KR20200089966A KR 20200089966 A KR20200089966 A KR 20200089966A KR 1020190006908 A KR1020190006908 A KR 1020190006908A KR 20190006908 A KR20190006908 A KR 20190006908A KR 20200089966 A KR20200089966 A KR 20200089966A
- Authority
- KR
- South Korea
- Prior art keywords
- sliding
- underwater
- antenna block
- block
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/38—Arrangement of visual or electronic watch equipment, e.g. of periscopes, of radar
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/14—Receivers specially adapted for specific applications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/12—Supports; Mounting means
- H01Q1/22—Supports; Mounting means by structural association with other equipment or articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/001—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations
- B63G2008/002—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Description
도 2는 일 실시 예에 따른 회수 시스템의 사시도이다.
도 3은 일 실시 예에 따른 회수 시스템의 블록도이다
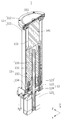
도 4는 일 실시 예에 따른 회수 시스템의 단면 사시도이다.
도 5는 일 실시 예에 따른 회수 시스템의 확대 단면도이다
도 6은 일 실시 예에 따른 회수 시스템이 상승 위치로 구동된 모습을 나타내는 사시도이다.
도 7은 일 실시 예에 따른 수중 운동체 회수 방법의 순서도이다.
Claims (14)
- 수중 운동체의 동체의 상측 방향으로부터 함몰 형성되는 내부 공간을 갖는 베이스;
상기 베이스의 내부 공간에 삽입되어 상하 방향으로 이동 가능한 슬라이딩 블록;
상기 베이스의 하측에 연결되어 상기 슬라이딩 블록을 상하 방향으로 슬라이딩 시키는 슬라이딩 구동부;
상기 슬라이딩 블록의 상측에 연결되고 외부로부터 위치 정보 신호를 송수신할 수 있는 안테나 블록; 및
상기 베이스의 상측 개구를 차폐하는 커버부를 포함하는 회수 시스템.
- 제 1 항에 있어서,
상기 베이스의 상측 개구를 차폐하는 커버부를 더 포함하고,
상기 커버부는 상기 안테나 블록이 상승함에 따라 외부로 분리 가능한 것을 특징으로 하는 회수 시스템.
- 제 2 항에 있어서,
상기 커버부는,
상기 베이스의 상측 개구를 차폐하도록 삽입되는 커버 플레이트; 및
상기 베이스의 상측 개구 및 커버 플레이트의 적어도 일부를 동시에 통과하도록 설치되어 상기 커버 플레이트를 상기 베이스에 대해 고정하는 전단 핀을 포함하고,
상기 전단 핀은 상기 안테나 블록이 상승함에 따라 절단되는 것을 특징으로 하는 회수 시스템.
- 제 3 항에 있어서,
상기 안테나 블록은,
상기 슬라이딩 블록의 상측 방향으로 돌출 형성되어 외부 통신을 수행하는 송수신부; 및
상기 슬라이딩 블록의 가장자리를 따라 상측 방향으로 돌출 형성된 가압부를 포함하고,
상기 안테나 블록이 상승할 경우 상기 가압부는 상기 커버부의 하측 가장자리를 상측 방향으로 가압하는 회수 시스템.
- 제 4 항에 있어서,
상기 커버 플레이트는, 가장자리를 따라 하측으로 돌출 형성되는 단차부를 포함하고,
상기 안테나 블록이 상승하여 상기 커버 플레이트와 접촉될 경우, 상기 송수신부는 상단은 상기 단차부의 내주면에 수용되고, 상기 가압부는 상기 단차부의 하측에 접촉하는 것을 특징으로 하는 회수 시스템.
- 제 2 항에 있어서,
상기 슬라이딩 구동부는,
회전 모터; 및
상기 회전 모터에 회전 가능하게 연결되어 상측 방향으로 연장되고 외주면에 나사산이 형성된 슬라이딩 샤프트를 포함하고,
상기 슬라이딩 블록은,
상기 내부 공간에 수용되는 슬라이딩 부재를 포함하고,
상기 슬라이딩 부재는, 하측으로부터 함몰 형성되어 상기 슬라이딩 샤프트를 수용하고 상기 슬라이딩 샤프트의 나사산과 체결 가능한 나사산을 구비하는 너트 구멍을 포함하는 회수 시스템.
- 제 6 항에 있어서,
상기 슬라이딩 블록은,
상기 슬라이딩 부재의 외주면에 형성되고 상기 베이스의 내부 공간의 내주면에 접촉하는 오링을 더 포함하는 회수 시스템.
- 제 4 항에 있어서,
상기 수중 운동체의 수심을 계측하는 수심 감지 센서; 및
상기 수심 감지 센서로부터 계측된 수심에 기초하여 상기 수중 운동체가 수면 밖으로 부상하는 경우, 상기 슬라이딩 구동부를 통해 상기 안테나 블록을 상기 수중 운동체 밖으로 돌출시키는 제어부를 더 포함하는 회수 시스템.
- 제 8 항에 있어서,
상기 송수신부는,
위치 정보 신호를 수신하는 GPS 센서; 및
상기 위치 정보 신호를 무선 주파수로 방출하는 RF 안테나를 포함하고,
상기 제어부는, 상기 수중 운동체가 수면 밖으로 부상하는 경우 상기 GPS 센서 및 RF 안테나를 구동하는 것을 특징으로 하는 회수 시스템.
- 수중 운동체가 회수를 위해 부상하는 수중 운동체 부상 단계;
수심을 측정하여 상기 수중 운동체가 수면 밖으로 부상하였는지 여부를 감지하는 수면 부상 확인 단계;
상기 수중 운동체가 수면 밖으로 부상한 이후, 슬라이딩 구동부를 통해 상기 수중 운동체 내부의 안테나 블록을 상기 수중 운동체의 상측 방향으로 돌출시키는 안테나 블록 상승 단계; 및
상기 안테나 블록을 통해 외부로 위치 정보 신호를 송신하는 위치 정보 송신 단계를 포함하는 수중 운동체의 회수 방법.
- 제 10 항에 있어서,
상기 안테나 블록 상승 단계는,
상기 안테나 블록을 통해 상기 안테나 블록을 외부로 차폐하는 커버부를 상측 방향으로 가압하여 분리시키는 커버부 제거 단계를 포함하는 수중 운동체의 회수 방법.
- 제 11 항에 있어서,
상기 커버부 제거 단계는, 외부로부터 상기 커버부의 적어도 일부를 통과하여 상기 커버부를 고정하는 전단 핀을 제거하는 것을 특징으로 하는 수중 운동체의 회수 방법.
- 제 10 항에 있어서,
상기 안테나 블록의 송수신부를 통해 위치 정보 신호가 수신되었는지 여부를 감지하여, 상기 위치 정보 신호가 감지될 때까지 상기 안테나 블록 상승 단계를 반복적으로 수행시키는 위치 정보 수신 확인 단계를 더 포함하는 수중 운동체의 회수 방법.
- 제 13 항에 있어서,
상기 위치 정보 송신 단계 이후, 외부의 회수함으로부터 회수 신호가 수신되었는지 여부를 감지하는 회수 신호 감지 단계; 및
상기 회수 신호 감지 단계에서 회수 신호가 감지되는 경우, 상기 슬라이딩 구동부를 통해 상기 안테나 블록을 상기 수중 운동체 내부로 하강시키는 안테나 블록 하강 단계를 더 포함하는 수중 운동체의 회수 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190006908A KR102181909B1 (ko) | 2019-01-18 | 2019-01-18 | 수중 운동체의 회수 시스템 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190006908A KR102181909B1 (ko) | 2019-01-18 | 2019-01-18 | 수중 운동체의 회수 시스템 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200089966A true KR20200089966A (ko) | 2020-07-28 |
| KR102181909B1 KR102181909B1 (ko) | 2020-11-23 |
Family
ID=71831697
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190006908A Active KR102181909B1 (ko) | 2019-01-18 | 2019-01-18 | 수중 운동체의 회수 시스템 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102181909B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11753840B1 (en) | 2022-09-09 | 2023-09-12 | Degrii Co., Ltd. | Floating device and robotic pool cleaner |
| KR20240174397A (ko) * | 2023-06-08 | 2024-12-17 | 주식회사 엠에이텍 | 수중체 회수 장치 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6502528B1 (en) * | 2001-08-20 | 2003-01-07 | The United States Of America As Represented By The Secretary Of The Navy | Pressure-balanced gas turbine underwater launcher |
| KR20070104249A (ko) * | 2006-04-21 | 2007-10-25 | 칼조니 에스.알.엘. | 잠수함의 센서 등을 지지하는 지지부를 이동시키는전기작동식 장치 |
| KR101173938B1 (ko) * | 2011-06-30 | 2012-08-14 | 엘아이지넥스원 주식회사 | 수중 운동체 회수 유도 장치 |
| KR20160084771A (ko) * | 2015-01-06 | 2016-07-14 | 대우조선해양 주식회사 | 커버를 갖는 잠수함용 안테나 및 이를 포함하는 잠수함 |
| KR101784960B1 (ko) * | 2016-12-16 | 2017-10-12 | 엘아이지넥스원 주식회사 | 안테나 전개 장치 및 방법 |
-
2019
- 2019-01-18 KR KR1020190006908A patent/KR102181909B1/ko active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6502528B1 (en) * | 2001-08-20 | 2003-01-07 | The United States Of America As Represented By The Secretary Of The Navy | Pressure-balanced gas turbine underwater launcher |
| KR20070104249A (ko) * | 2006-04-21 | 2007-10-25 | 칼조니 에스.알.엘. | 잠수함의 센서 등을 지지하는 지지부를 이동시키는전기작동식 장치 |
| KR101173938B1 (ko) * | 2011-06-30 | 2012-08-14 | 엘아이지넥스원 주식회사 | 수중 운동체 회수 유도 장치 |
| KR20160084771A (ko) * | 2015-01-06 | 2016-07-14 | 대우조선해양 주식회사 | 커버를 갖는 잠수함용 안테나 및 이를 포함하는 잠수함 |
| KR101784960B1 (ko) * | 2016-12-16 | 2017-10-12 | 엘아이지넥스원 주식회사 | 안테나 전개 장치 및 방법 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11753840B1 (en) | 2022-09-09 | 2023-09-12 | Degrii Co., Ltd. | Floating device and robotic pool cleaner |
| WO2024051059A1 (zh) * | 2022-09-09 | 2024-03-14 | 众清智能科技(苏州)有限公司 | 一种漂浮装置及泳池清洁机器人 |
| KR20240174397A (ko) * | 2023-06-08 | 2024-12-17 | 주식회사 엠에이텍 | 수중체 회수 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102181909B1 (ko) | 2020-11-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102192744B1 (ko) | 천해 해저지형 탐사용 수상선 시스템 | |
| KR102181909B1 (ko) | 수중 운동체의 회수 시스템 및 방법 | |
| US9884670B2 (en) | Air-based-deployment-compatible underwater vehicle configured to perform vertical profiling and, during information transmission, perform motion stabilization at a water surface, and associated methods | |
| US20140301161A1 (en) | Marine seismic survey and method using autonomous underwater vehicles and underwater bases | |
| KR101197833B1 (ko) | 수중 위치추적 시스템의 캘리브레이션 방법 | |
| JP4421306B2 (ja) | 水中航走体の誘導装置 | |
| KR101645646B1 (ko) | 수중운동체 동작 상태 확인 시스템 및 방법 | |
| KR101760192B1 (ko) | 수중 이동형 에이전트 도킹 시스템 및 이를 이용한 도킹방법 | |
| KR960019025A (ko) | 이동체 특정 장치 | |
| KR102343875B1 (ko) | 케이블 실링 어셈블리를 포함하는 무인잠수정의 안테나 장치 | |
| US20160103237A1 (en) | System and Method for Accurate Positioning of Control Devices for Instrumented Cables | |
| KR20200063430A (ko) | 수중 위치 추정 방법 및 장치 | |
| RU137126U1 (ru) | Гидроакустический комплекс надводного корабля | |
| US20170346557A1 (en) | Underwater visible light transceiving terminal | |
| JP2019177833A (ja) | 水中機器回収方法、及び水中機器回収システム | |
| RU2645427C2 (ru) | Активируемый по глубине переключатель датчика и способ его отключения | |
| NO20241065A1 (en) | Autonomous underwater vehicle and corresponding guidance method | |
| CA3155537A1 (en) | Variable geometry sonar system and method | |
| CN214795192U (zh) | 一种海洋测量用声呐检测装置 | |
| CN110108166A (zh) | 一种无人飞机频谱侦测与反制一体化装置和控制方法 | |
| CN217001813U (zh) | 一种油井测距系统 | |
| JPS5582975A (en) | Stable retention control of ocean investigation ship and position detector for stable retention control | |
| CN115113213A (zh) | 水下声呐、水下航行器及水下航行器在宽广水域巡航方法 | |
| JPH05131978A (ja) | 水中航走体における位置確認装置 | |
| KR102637095B1 (ko) | 부이를 이용한 선박 수중방사소음 계측 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |