KR20200090655A - 전자 기기, 안전 거리 제공 시스템 및 방법 - Google Patents
전자 기기, 안전 거리 제공 시스템 및 방법 Download PDFInfo
- Publication number
- KR20200090655A KR20200090655A KR1020200085178A KR20200085178A KR20200090655A KR 20200090655 A KR20200090655 A KR 20200090655A KR 1020200085178 A KR1020200085178 A KR 1020200085178A KR 20200085178 A KR20200085178 A KR 20200085178A KR 20200090655 A KR20200090655 A KR 20200090655A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- distance
- driving
- lane
- braking distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/02—Rear-view mirror arrangements
- B60R1/04—Rear-view mirror arrangements mounted inside vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/02—Rear-view mirror arrangements
- B60R1/08—Rear-view mirror arrangements involving special optical features, e.g. avoiding blind spots, e.g. convex mirrors; Side-by-side associations of rear-view and other mirrors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D41/00—Fittings for identifying vehicles in case of collision; Fittings for marking or recording collision areas
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/57—Mechanical or electrical details of cameras or camera modules specially adapted for being embedded in other devices
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
-
- H04N5/2257—
-
- H04N5/232—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/08—Lane monitoring; Lane Keeping Systems
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Multimedia (AREA)
- Mechanical Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Automation & Control Theory (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
Abstract
Description
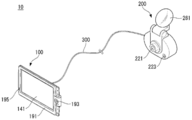
도 2는 본 발명의 다른 실시예에 따른 안전 거리 제공 시스템의 도면이다.
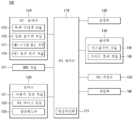
도 3은 도 1에 도시한 일 실시예에 따른 차량용 내비게이션의 블록 구성도이다.
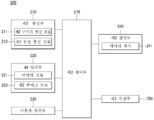
도 4는 도 1에 도시한 일 실시예에 따른 차량용 블랙박스의 블록 구성도이다.
도 5는 도 3에 도시한 안전 거리 제공 시스템을 포함하는 통신망의 구성도이다.
도 6은 차량용 블랙박스로부터 수신하는 전방의 차량 중 안내 메시지를 제공할 대상의 예를 설명하기 위한 도면이다.
도 7은 본 발명의 일 실시예에 따른 전자 기기의 안전 거리 제공 방법을 설명하기 위한 흐름도이다.
도 8은 본 발명의 일 실시예에 따른 전자 기기의 메모리에 저장된 주행 속도별 제동 거리가 매칭되어 저장된 형태의 예를 나타낸 것이다.
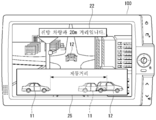
도 9 내지 도 10b는 도 7에 도시된 실시예에 따른 전자 기기의 안전 거리 제공 방법의 일 예를 보여주는 도면이다.
도 11은 도 9에 도시된 실시예에 따른 전자 기기의 안전 거리 제공 방법의 일 예를 보여주는 도면이다.
도 12는 도 11에 도시된 실시예에 따른 전자 기기의 안전 거리 제공 방법의 일 예를 보여주는 도면이다.
도 13은 본 발명의 일 실시예에 따른 전자 기기의 안전 거리 제공 방법을 설명하기 위한 흐름도이다.
도 14는 도 13에 도시된 실시예에 따른 전자 기기의 안전 거리 제공 방법의 일 예를 보여주는 도면이다.
도 15는 본 발명의 일 실시예에 따른 전자 기기의 안전 거리 제공 방법을 설명하기 위한 흐름도이다.
도 16은 도 15에 도시된 실시예에 따른 전자 기기의 안전 거리 제공 방법의 일 예를 보여주는 도면이다.
도 17은 본 발명의 일 실시예에 따른 전자 기기의 안전 거리 제공 방법을 설명하기 위한 흐름도이다.
도 18은 도 17에 도시된 실시예에 따른 전자 기기의 안전 거리 제공 방법의 일 예를 보여주는 도면이다.
30:네트워크 40:제어국
50:기지국 100:차량용 내비게이션
120:입력부 140:출력부
150:제1 저장부 152: 영상 획득부
160:전원부 170:제1 제어부
200:차량용 블랙박스 210:제2 통신부
220:AV 입력부 230:사용자 입력부
240:제2 센싱부 260:제2 저장부
300:통신케이블
Claims (19)
- 차량의 전방을 센싱하는 전방 센싱부;
차량의 제원을 저장하는 메모리; 및
상기 전방 센싱부의 센싱 결과 상기 차량이 주행 중인 차선 상 또는 상기 차량이 주행 중인 차선의 주변 차선 상에 전방 차량이 존재하는 경우 상기 차량과 상기 전방 차량과의 거리 및 상기 차량의 제원을 고려하여 상기 차량의 주행 속도에 따른 제동 거리를 산출하는 제어부;를 포함하고,
상기 제어부는, 상기 전방 차량이 상기 산출된 제동 거리 내에 존재하는 경우 상기 차량의 운전자에게 상기 전방 차량에 관련된 안내 메시지를 생성하되,
상기 제어부는,
상기 전방 차량이 상기 차량이 주행 중인 차선에 위치하는 제1 전방 차량이라면, 상기 차량과 상기 제1 전방 차량과의 제동 거리를 산출하고,
상기 전방 차량이 상기 차량이 주행 중인 차선의 주변 차선 상에 위치하는 제2 전방 차량이라면, 상기 차량의 주행 속도와 상기 제2 전방 차랑의 주행 방향을 판단하여 상기 차량의 주행 속도가 일정 속도 이상이고, 상기 제2 전방 차량의 주행 방향이 상기 차량이 주행 중인 차선으로 변경된다면, 상기 제2 전방 차량과의 충돌을 방지하기 위해 상기 차량의 주행 속도에 대응하는 제동 거리를 산출하는 것을 특징으로 하는 전자 기기. - 제 1 항에 있어서,
상기 제어부는 상기 차량의 제원 중 너비를 고려하여 상기 차량의 주행 속도에 따른 제동 거리를 산출하는 것을 특징으로 하는 전자 기기. - 제 1 항에 있어서,
상기 제어부는 상기 전방 차량과 상기 차량의 제원 중 너비에 따른 차량 간 거리를 고려하여 상기 차량의 주행 속도에 따른 제동 거리를 산출하는 것을 특징으로 하는 전자 기기 - 제 1 항에 있어서,
상기 제어부는 전방의 도로 상황 정보를 고려하여 상기 주행 속도에 따른 제동 거리를 산출하고,
상기 도로 상황 정보는,
상기 차량의 전방 영상, 상기 전방 차량과의 거리 정보 및 도로 상태 정보 중 적어도 하나를 포함하는 것을 특징으로 하는 전자 기기. - 제 1 항에 있어서,
상기 제어부는 상기 차량의 제동 거리에 제동 시 부가 상황을 반영하여 산출된 안전 거리와 상기 전방 차량 간의 거리를 이용하여 상기 차량의 운전자에게 상기 전방 차량에 관련된 안내 메시지를 생성하는 것을 특징으로 하는 전자 기기. - 제 1 항에 있어서,
상기 제어부는,
상기 전방 차량이, 상기 제동 거리를 고려한 안전 거리 내에 존재하는 경우, 상기 안내 메시지를 제공하는 것을 특징으로 하는 전자 기기. - 제 6 항에 있어서,
상기 안전 거리는, 사용자 입력에 따라 미리 정의되는 것을 특징으로 하는 전자 기기. - 제 1 항에 있어서,
상기 메모리는,
상기 차량의 주행 속도에 따른 제동 거리 및 상기 제동 거리에 대응하는 안전 거리를 저장하는 것을 특징으로 하는 전자 기기. - 제 1 항에 있어서,
상기 제어부는,
상기 차량과 상기 전방 차량과의 거리를 제동 거리로 하고, 상기 제동 거리에 대응하는 속도 정보를 제공하는 것을 특징으로 하는 전자 기기. - 차량의 전방을 센싱하는 전방 센싱 장치;
차량의 제원을 저장하는 저장 장치; 및
상기 센싱 장치의 상기 차량의 전방 센싱 결과 상기 차량이 주행 중인 차선 상 또는 상기 차량이 주행 중인 차선의 주변 차선 상에 전방 차량이 존재하는 경우 상기 차량과 상기 전방 차량과의 거리 및 상기 차량의 제원을 고려하여 상기 차량의 주행 속도에 따른 제동 거리를 산출하는 제어 장치;를 포함하고,
상기 제어 장치는, 상기 전방 차량이 상기 산출된 제동 거리 내에 존재하는 경우, 상기 차량의 운전자에게 상기 전방 차량에 관련된 안내 메시지와 상기 차량을 제어하기 위한 제어 신호를 생성하는 것을 특징으로 하고
상기 제어 신호는 상기 차량과 상기 전방 차량과의 충돌을 방지하기 위해 상기 차량에 장착된 다른 디바이스를 제어하기 위한 신호이고,
상기 제어 장치는,
상기 전방 차량이 상기 차량이 주행 중인 차선에 위치하는 제1 전방 차량이라면, 상기 차량과 상기 제1 전방 차량과의 제동 거리를 산출하고,
상기 전방 차량이 상기 차량이 주행 중인 차선의 주변 차선 상에 위치하는 제2 전방 차량이라면, 상기 차량의 주행 속도와 상기 제2 전방 챠랑의 주행 방향을 판단하고, 상기 차량의 주행 속도가 일정 속도 이상이고, 상기 제2 전방 차량의 주행 방향이 상기 차량이 주행 중인 차선으로 변경된다면, 상기 제2 전방 차량과의 충돌을 방지하기 위해 상기 차량의 주행 속도에 대응하는 제동 거리를 산출하는 것을 특징으로 하는 안전 거리 제공 시스템. - 제 10 항에 있어서,
상기 제어 장치는 상기 전방 차량과 상기 차량의 제원 중 너비에 따른 차량 간 거리를 고려하여 상기 차량의 주행 속도에 따른 제동 거리를 산출하는 것을 특징으로 하는 안전 거리 제공 시스템. - 제 10 항에 있어서,
상기 제어 장치는 상기 차량의 제동 거리에 제동 시 부가 상황을 반영하여 산출된 안전 거리와 상기 전방 차량 간의 거리를 이용하여 상기 차량의 운전자에게 상기 전방 차량에 관련된 안내 메시지를 생성하는 것을 특징으로 하는 안전 거리 제공 시스템. - 차량의 제원을 저장하는 단계;
상기 차량의 전방을 센싱하는 단계;
상기 차량의 전방 센싱 결과 상기 차량이 주행 중인 차선 상 또는 상기 차량이 주행 중인 차선의 주변 차선 상에 전방 차량이 존재하는 경우 상기 차량과 상기 전방 차량과의 거리 및 상기 차량의 제원을 고려하여 상기 차량의 주행 속도를 획득하는 단계;
상기 주행 속도에 따른 제동 거리를 산출하는 단계;
상기 전방 차량이 상기 산출된 제동 거리 내에 존재하는 경우, 상기 차량의 운전자에게 상기 전방 차량에 관련된 안내 메시지를 생성하는 단계를 포함하고,
상기 산출하는 단계는,
상기 전방 차량이 상기 차량이 주행 중인 차선에 위치하는 제1 전방 차량이라면, 상기 차량과 상기 제1 전방 차량과의 제동 거리를 산출하고,
상기 전방 차량이 상기 차량이 주행 중인 차선의 주변 차선 상에 위치하는 제2 전방 차량이라면, 상기 차량의 주행 속도와 상기 제2 전방 차랑의 주행 방향을 판단하여 상기 차량의 주행 속도가 일정 속도 이상이고, 상기 제2 전방 차량의 주행 방향이 상기 차량이 주행 중인 차선으로 변경된다면, 상기 제2 전방 차량과의 충돌을 방지하기 위해 상기 차량의 주행 속도에 대응하는 제동 거리를 산출하는 것을 특징으로 하는 차량용 안전 거리 제공 방법. - 제 13 항에 있어서,
상기 산출하는 단계는,
상기 차량의 제원 중 너비를 고려하여 상기 차량의 주행 속도에 따른 제동 거리를 산출하는 것을 특징으로 하는 차량용 안전 거리 제공 방법. - 제 13 항에 있어서,
상기 산출하는 단계는,
상기 전방 차량과 상기 차량의 제원 중 너비에 따른 차량 간 거리를 고려하여 상기 차량의 주행 속도에 따른 제동 거리를 산출하는 것을 특징으로 하는 차량용 안전 거리 제공 방법. - 제 13 항에 있어서,
상기 산출하는 단계는 전방의 도로 상황 정보를 고려하여 상기 주행 속도에 따른 제동 거리를 산출하고,
상기 도로 상황 정보는,
상기 차량의 전방 영상, 상기 전방 차량과의 거리 정보 및 도로 상태 정보 중 적어도 하나를 포함하는 것을 특징으로 하는 차량용 안전 거리 제공 방법. - 제 13 항에 있어서,
상기 산출하는 단계는 상기 차량의 제동 거리에 제동 시 부가 상황을 반영하여 안전 거리를 산출하고,
상기 생성하는 단계는 상기 전방 차량 간의 거리를 이용하여 상기 차량의 운전자에게 상기 전방 차량에 관련된 안내 메시지를 생성하는 것을 특징으로 하는 차량용 안전 거리 제공 방법. - 제 17 항에 있어서,
상기 생성하는 단계는,
상기 전방 차량이, 상기 제동 거리를 고려한 안전 거리 내에 존재하는 경우, 상기 안내 메시지를 제공하는 것을 특징으로 하는 차량용 안전 거리 제공 방법. - 제 13 항 내지 제 18 항 중 어느 한 항의 방법을 실행하기 위한 프로그램이 기록되어 있는 것을 특징으로 하는 컴퓨터 판독 가능한 기록 매체.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200085178A KR102354211B1 (ko) | 2019-05-29 | 2020-07-10 | 전자 기기, 안전 거리 제공 시스템 및 방법 |
| KR1020200143113A KR102304047B1 (ko) | 2020-07-10 | 2020-10-30 | 전자 기기, 안전 거리 제공 시스템 및 방법 |
| KR1020220006940A KR102558665B1 (ko) | 2020-07-10 | 2022-01-18 | 전자 기기, 안전 거리 제공 시스템 및 방법 |
| KR1020230006694A KR102723498B1 (ko) | 2020-07-10 | 2023-01-17 | 전자 기기, 안전 거리 제공 시스템 및 방법 |
| KR1020240146154A KR20240156354A (ko) | 2020-07-10 | 2024-10-23 | 전자 기기, 안전 거리 제공 시스템 및 방법 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190063357A KR20190062362A (ko) | 2019-05-29 | 2019-05-29 | 전자 기기, 안전 거리 제공 시스템 및 방법 |
| KR1020200085178A KR102354211B1 (ko) | 2019-05-29 | 2020-07-10 | 전자 기기, 안전 거리 제공 시스템 및 방법 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190063357A Division KR20190062362A (ko) | 2019-05-29 | 2019-05-29 | 전자 기기, 안전 거리 제공 시스템 및 방법 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200143113A Division KR102304047B1 (ko) | 2020-07-10 | 2020-10-30 | 전자 기기, 안전 거리 제공 시스템 및 방법 |
| KR1020220006940A Division KR102558665B1 (ko) | 2020-07-10 | 2022-01-18 | 전자 기기, 안전 거리 제공 시스템 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200090655A true KR20200090655A (ko) | 2020-07-29 |
| KR102354211B1 KR102354211B1 (ko) | 2022-01-21 |
Family
ID=80050417
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200085178A Active KR102354211B1 (ko) | 2019-05-29 | 2020-07-10 | 전자 기기, 안전 거리 제공 시스템 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102354211B1 (ko) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10119674A (ja) * | 1996-10-11 | 1998-05-12 | Honda Access Corp | 車両の衝突警報システム |
| JPH1159355A (ja) * | 1997-08-26 | 1999-03-02 | Nippon Telegr & Teleph Corp <Ntt> | 車間距離警報装置 |
| KR20000021753A (ko) * | 1998-09-30 | 2000-04-25 | 김태구 | 자동차 추돌경보 장치 및 방법 |
| JP2003175810A (ja) * | 2001-12-11 | 2003-06-24 | Nissan Motor Co Ltd | 車両用制動制御装置 |
| JP2004309273A (ja) * | 2003-04-04 | 2004-11-04 | Sumitomo Electric Ind Ltd | 距離検出装置及び車輌用障害物監視装置 |
-
2020
- 2020-07-10 KR KR1020200085178A patent/KR102354211B1/ko active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10119674A (ja) * | 1996-10-11 | 1998-05-12 | Honda Access Corp | 車両の衝突警報システム |
| JPH1159355A (ja) * | 1997-08-26 | 1999-03-02 | Nippon Telegr & Teleph Corp <Ntt> | 車間距離警報装置 |
| KR20000021753A (ko) * | 1998-09-30 | 2000-04-25 | 김태구 | 자동차 추돌경보 장치 및 방법 |
| JP2003175810A (ja) * | 2001-12-11 | 2003-06-24 | Nissan Motor Co Ltd | 車両用制動制御装置 |
| JP2004309273A (ja) * | 2003-04-04 | 2004-11-04 | Sumitomo Electric Ind Ltd | 距離検出装置及び車輌用障害物監視装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102354211B1 (ko) | 2022-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10972975B2 (en) | Electronic device for transmitting communication signal related to pedestrian safety and method of operating same | |
| US11518384B2 (en) | Method for displaying lane information and apparatus for executing the method | |
| US9518829B2 (en) | Driving assistance system, vehicle and method | |
| US7382274B1 (en) | Vehicle interaction communication system | |
| US10234567B2 (en) | Location awareness apparatus, vehicle having the same and method for controlling the apparatus | |
| CN106575480B (zh) | 信息处理系统、终端装置、程序、移动终端装置、计算机可读取的非易失性的有形记录介质 | |
| KR102306644B1 (ko) | 비-v2v 차량의 검출 | |
| US12151677B2 (en) | Vehicle control device, vehicle control method, program, and vehicle | |
| CN107856666A (zh) | 一种车辆的自动泊车系统和方法 | |
| US11062603B2 (en) | Object detection device for vehicle and object detection system for vehicle | |
| US11972268B2 (en) | Activating new device based on container in vehicle | |
| WO2021065626A1 (ja) | 交通制御システム、交通制御方法及び制御装置 | |
| CN114828131B (zh) | 通讯方法、介质、车载通讯系统、芯片及车辆 | |
| KR101781041B1 (ko) | 차량용 레이더 장치, 차량 운전 보조 시스템 및 차량 | |
| KR102095434B1 (ko) | 차량 운행의 안전성을 향상시킨 복합 디지털 운행기록 장치. | |
| KR20200070101A (ko) | 차선 표시 방법 및 이를 수행하는 전자 기기 | |
| KR102558665B1 (ko) | 전자 기기, 안전 거리 제공 시스템 및 방법 | |
| KR102354211B1 (ko) | 전자 기기, 안전 거리 제공 시스템 및 방법 | |
| KR102723498B1 (ko) | 전자 기기, 안전 거리 제공 시스템 및 방법 | |
| US12000710B2 (en) | Method for providing a current local environment status map for a motor vehicle, and motor vehicle for carrying out a method of this kind | |
| KR20120079198A (ko) | 전자 기기, 안전 거리 제공 시스템 및 방법 | |
| KR20190062362A (ko) | 전자 기기, 안전 거리 제공 시스템 및 방법 | |
| KR20180075470A (ko) | 전자 기기, 안전 거리 제공 시스템 및 방법 | |
| KR101751408B1 (ko) | 운행정보제공 복합 단말기 | |
| KR20120078876A (ko) | 전자 기기 및 전자 기기의 차선 안내 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| PA0107 | Divisional application |
Comment text: Divisional Application of Patent Patent event date: 20200710 Patent event code: PA01071R01D Filing date: 20190529 Application number text: 1020190063357 |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200803 Patent event code: PE09021S01D |
|
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20201123 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20200803 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| X091 | Application refused [patent] | ||
| AMND | Amendment | ||
| PX0901 | Re-examination |
Patent event code: PX09011S01I Patent event date: 20201123 Comment text: Decision to Refuse Application Patent event code: PX09012R01I Patent event date: 20201103 Comment text: Amendment to Specification, etc. |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20210303 Patent event code: PE09021S01D |
|
| AMND | Amendment | ||
| PX0701 | Decision of registration after re-examination |
Patent event date: 20211015 Comment text: Decision to Grant Registration Patent event code: PX07013S01D Patent event date: 20210603 Comment text: Amendment to Specification, etc. Patent event code: PX07012R01I Patent event date: 20210119 Comment text: Amendment to Specification, etc. Patent event code: PX07012R01I Patent event date: 20201123 Comment text: Decision to Refuse Application Patent event code: PX07011S01I Patent event date: 20201103 Comment text: Amendment to Specification, etc. Patent event code: PX07012R01I |
|
| X701 | Decision to grant (after re-examination) | ||
| A107 | Divisional application of patent | ||
| GRNT | Written decision to grant | ||
| PA0107 | Divisional application |
Comment text: Divisional Application of Patent Patent event date: 20220118 Patent event code: PA01071R01D Filing date: 20190529 Application number text: 1020190063357 |
|
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20220118 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20220118 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20250106 Start annual number: 4 End annual number: 6 |