KR20200093603A - 라이다 시스템들의 개선된 분해능을 위한 광학 설계들 및 검출기 설계들 - Google Patents
라이다 시스템들의 개선된 분해능을 위한 광학 설계들 및 검출기 설계들 Download PDFInfo
- Publication number
- KR20200093603A KR20200093603A KR1020207018298A KR20207018298A KR20200093603A KR 20200093603 A KR20200093603 A KR 20200093603A KR 1020207018298 A KR1020207018298 A KR 1020207018298A KR 20207018298 A KR20207018298 A KR 20207018298A KR 20200093603 A KR20200093603 A KR 20200093603A
- Authority
- KR
- South Korea
- Prior art keywords
- lens
- laser
- laser source
- detector
- return
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
- G01S7/4815—Constructional features, e.g. arrangements of optical elements of transmitters alone using multiple transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J1/00—Photometry, e.g. photographic exposure meter
- G01J1/02—Details
- G01J1/04—Optical or mechanical part supplementary adjustable parts
- G01J1/0407—Optical elements not provided otherwise, e.g. manifolds, windows, holograms, gratings
- G01J1/0411—Optical elements not provided otherwise, e.g. manifolds, windows, holograms, gratings using focussing or collimating elements, i.e. lenses or mirrors; Aberration correction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/04—Systems determining the presence of a target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
- G01S17/26—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves wherein the transmitted pulses use a frequency-modulated or phase-modulated carrier wave, e.g. for pulse compression of received signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/32—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S17/34—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B19/00—Condensers, e.g. light collectors or similar non-imaging optics
- G02B19/0004—Condensers, e.g. light collectors or similar non-imaging optics characterised by the optical means employed
- G02B19/0009—Condensers, e.g. light collectors or similar non-imaging optics characterised by the optical means employed having refractive surfaces only
- G02B19/0014—Condensers, e.g. light collectors or similar non-imaging optics characterised by the optical means employed having refractive surfaces only at least one surface having optical power
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B19/00—Condensers, e.g. light collectors or similar non-imaging optics
- G02B19/0033—Condensers, e.g. light collectors or similar non-imaging optics characterised by the use
- G02B19/0047—Condensers, e.g. light collectors or similar non-imaging optics characterised by the use for use with a light source
- G02B19/0052—Condensers, e.g. light collectors or similar non-imaging optics characterised by the use for use with a light source the light source comprising a laser diode
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B19/00—Condensers, e.g. light collectors or similar non-imaging optics
- G02B19/0033—Condensers, e.g. light collectors or similar non-imaging optics characterised by the use
- G02B19/0085—Condensers, e.g. light collectors or similar non-imaging optics characterised by the use for use with both a detector and a source
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/09—Beam shaping, e.g. changing the cross-sectional area, not otherwise provided for
- G02B27/0938—Using specific optical elements
- G02B27/095—Refractive optical elements
- G02B27/0955—Lenses
- G02B27/0966—Cylindrical lenses
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/30—Collimators
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optics & Photonics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
Description
[0010] 도 2는, 세장형 방출 영역 및 수평 및 수직 방향들의 상이한 발산 각도들을 갖는 레이저 소스를 개략적으로 예시한다.
[0011] 도 3a 및 3b는 라이다 시스템에서 레이저 빔을 시준하기 위한 광학 시스템을 개략적으로 예시한다.
[0012] 도 4a-4b는 본 발명의 일부 실시예들에 따른, 라이다 시스템에서 레이저 빔을 시준하기 위한 광학 시스템을 개략적으로 예시한다.
[0013] 도 5a-5d는 본 발명의 일부 실시예들에 따른, 원거리장 빔 스폿 형상(far-field beam spot shape)에 대한 원통형 렌즈의 효과를 개략적으로 예시한다.
[0014] 도 6a는 본 발명의 일부 실시예들에 따른 라이다 시스템에 사용될 수 있는 레이저 소스 및 원통형 렌즈의 예시적인 구성을 개략적으로 예시한다.
[0015] 도 6b는 본 발명의 일부 실시예들에 따른 레이저 소스 및 원통형 렌즈의 다른 예시적인 구성을 개략적으로 예시한다.
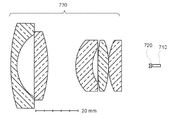
[0016] 도 7a는 본 발명의 일부 실시예들에 따른 라이다 시스템에서 레이저 빔을 시준하기 위한 광학 시스템의 단면도를 예시한다.
[0017] 도 7b는 본 발명의 일부 실시예들에 따른, 2개의 레이저 소스들을 포함하는 라이다 시스템에서 레이저 빔들을 시준하기 위한 광학 시스템의 단면도를 예시한다.
[0018] 도 8은 본 발명의 일부 실시예들에 따른, 라이다 시스템을 사용한 3-차원 이미징의 방법을 예시하는 간략화된 흐름도를 도시한다.
[0019] 도 9는 본 발명의 일부 실시예들에 따른 라이다 시스템을 개략적으로 예시한다.
[0020] 도 10a는 본 발명의 일부 실시예들에 따른 검출기 구성을 예시한다.
[0021] 도 10b는 단일 광 센서를 포함하는 검출기를 예시한다.
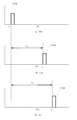
[0022] 도 11a-11c는 본 발명의 일부 실시예들에 따른, 도 9 및 10에 예시된 예에 대한 레이저 펄스들의 타이밍도들을 개략적으로 예시한다.
[0023] 도 12a는 본 발명의 일부 실시예들에 따른 검출기의 개략적인 평면도를 도시한다.
[0024] 도 12b는 본 발명의 일부 실시예들에 따른 검출기의 개략적인 평면도를 도시한다.
[0025] 도 13은 본 발명의 일부 실시예들에 따른 라이다 시스템을 개략적으로 예시한다.
[0026] 도 14는 본 발명의 일부 실시예들에 따라, 라이다 시스템을 사용한 3-차원 이미징의 방법을 예시하는 간략화된 흐름도를 도시한다.
Claims (45)
- 제1 방향의 제1 폭 및 상기 제1 방향에 직교하는 제2 방향의 제1 높이를 갖는 방출 영역을 갖는 레이저 소스 ― 상기 제1 폭은 상기 제1 높이보다 더 큼 ― ;
음의 도수(negative power)를 갖고 상기 레이저 소스의 앞에 위치된 원통형 렌즈 ― 상기 원통형 렌즈는, 상기 원통형 렌즈의 도수 축(power axis)이 실질적으로 상기 제1 방향을 따르도록 배향되고, 상기 원통형 렌즈는 상기 레이저 소스에 의해 방출된 레이저 빔의 상기 방출 영역을 가상 폭 및 가상 높이를 갖는 가상 방출 영역으로 변환하도록 구성되고, 상기 가상 폭은 상기 제1 폭 미만임 ― ; 및
상기 원통형 렌즈로부터 다운스트림에 위치된 회전 대칭 렌즈(rotationally symmetric lens)를 포함하고,
상기 회전 대칭 렌즈는 상기 레이저 빔을 원거리장(far-field)을 향해 시준 및 지향시키도록 구성되는,
광학 시스템. - 제1 항에 있어서,
상기 레이저 소스는 고체 상태 레이저 소스를 포함하는,
광학 시스템. - 제2 항에 있어서,
상기 원통형 렌즈는 상기 레이저 소스와 단일 패키지로 통합되는,
광학 시스템. - 제1 항에 있어서,
상기 레이저 소스, 상기 원통형 렌즈 및 상기 회전 대칭 렌즈는 라이다 시스템(lidar system)에서 사용되는,
광학 시스템. - 제4 항에 있어서,
상기 레이저 소스 및 상기 원통형 렌즈는, 상기 레이저 빔을 스캐닝하기 위해 상기 회전 대칭 렌즈의 초점 평면에서 일제히(in unison) 병진운동되도록 구성되는,
광학 시스템. - 제4 항에 있어서,
상기 레이저 소스 옆에 배열된 제2 레이저 소스 ― 이로써 상기 레이저 소스 및 상기 제2 레이저 소스는 레이저 어레이를 형성함 ― ; 및
상기 제2 레이저 소스의 앞에 위치되고, 상기 제2 레이저 소스에 의해 방출된 제2 레이저 빔의 제2 방출 영역을 제2 가상 방출 영역으로 변환하도록 구성된 제2 원통형 렌즈를 더 포함하고,
상기 회전 대칭 렌즈는 상기 제2 레이저 빔을 상기 원거리장을 향해 시준 및 지향시키도록 추가로 구성되는,
광학 시스템. - 복수의 레이저 펄스들을 방출하도록 구성된 레이저 소스 ― 상기 레이저 소스는 제1 방향의 제1 폭 및 상기 제1 방향에 직교하는 제2 방향의 제1 높이를 갖는 방출 영역을 갖고, 상기 제1 폭은 상기 제1 높이보다 더 큼 ― ;
음의 도수를 갖고 상기 레이저 소스의 앞에 위치된 원통형 렌즈 ― 상기 원통형 렌즈는, 상기 원통형 렌즈의 도수 축이 실질적으로 상기 제1 방향을 따르도록 배향되고, 상기 원통형 렌즈는 상기 방출 영역을 가상 폭 및 가상 높이를 갖는 가상 방출 영역으로 변환하도록 구성되고, 상기 가상 폭은 상기 제1 폭 미만임 ― ;
상기 원통형 렌즈로부터 다운스트림에 위치된 방출 렌즈 ― 상기 방출 렌즈는 회전적으로 대칭적이고 상기 복수의 레이저 펄스들을 하나 이상의 객체들을 향해 시준 및 지향시키도록 구성되고, 상기 하나 이상의 객체들은 복수의 리턴 레이저 펄스들을 생성하기 위해 상기 복수의 레이저 펄스들을 반사시킴 ― ;
회전 대칭적인 수용 렌즈 ― 상기 수용 렌즈는 상기 복수의 리턴 레이저 펄스들 각각을 수신하고, 상기 수용 렌즈의 초점 평면에서의 리턴 빔 스폿으로 포커싱하도록 구성됨 ― ;
상기 수용 렌즈의 상기 초점 평면에 위치된 검출 표면을 갖고, 상기 복수의 리턴 레이저 펄스들 각각을 수신 및 검출하도록 구성된 검출기; 및
상기 레이저 소스 및 상기 검출기에 커플링된 프로세서를 포함하고,
상기 프로세서는:
상기 복수의 리턴 레이저 펄스들 각각에 대한 비행 시간(time of flight)을 결정하고; 그리고
상기 복수의 리턴 레이저 펄스들 각각에 대한 상기 결정된 비행 시간에 기반하여 상기 하나 이상의 객체들의 3-차원 이미지를 구성하도록 구성되는,
3-차원 이미징을 위한 라이다 시스템. - 제7 항에 있어서,
상기 원통형 렌즈는 상기 레이저 소스와 단일 패키지로 통합되는,
3-차원 이미징을 위한 라이다 시스템. - 제7 항에 있어서,
상기 레이저 소스는, 상기 원통형 렌즈와 함께, 복수의 방출 위치들을 통해 상기 라이다 시스템의 광학 축에 실질적으로 직교하는 적어도 하나의 방향으로 병진운동되도록 구성되고, 상기 복수의 레이저 펄스들 각각은 상기 복수의 방출 위치들 중 개개의 방출 위치에서 방출되고,
상기 검출기는 상기 수용 렌즈의 초점 평면의 복수의 검출 위치들을 통해 상기 적어도 하나의 방향으로 병진운동되도록 구성되고,
상기 복수의 검출 위치들의 각각의 개개의 검출 위치는 상기 복수의 방출 위치들의 개개의 방출 위치에 대응하고,
상기 레이저 소스 및 상기 검출기는 서로에 관련하여 동기적으로 병진운동되는,
3-차원 이미징을 위한 라이다 시스템. - 제9 항에 있어서,
상기 레이저 소스 및 상기 검출기 각각은 2개의 방향들로 병진운동되도록 구성되는,
3-차원 이미징을 위한 라이다 시스템. - 제10 항에 있어서,
상기 레이저 소스 및 상기 검출기 각각은 리사주 패턴(Lissajous pattern)으로 병진운동되도록 구성되는,
3-차원 이미징을 위한 라이다 시스템. - 제7 항에 있어서,
상기 방출 렌즈는, 상기 방출 렌즈의 광학 축에 실질적으로 직교하는 적어도 하나의 방향으로 상기 레이저 소스에 대해 병진운동되도록 구성되고, 그리고
상기 수용 렌즈는 상기 적어도 하나의 방향으로 상기 검출기에 대해 병진운동되도록 구성되고,
상기 방출 렌즈 및 상기 수용 렌즈는 서로에 관련하여 동기적으로 병진운동되는,
3-차원 이미징을 위한 라이다 시스템. - 제12 항에 있어서,
상기 방출 렌즈 및 상기 수용 렌즈 각각은 2개의 방향들로 병진운동되는,
3-차원 이미징을 위한 라이다 시스템. - 제13 항에 있어서,
상기 방출 렌즈 및 상기 수용 렌즈 각각은 리사주 패턴으로 병진운동되는,
3-차원 이미징을 위한 라이다 시스템. - 제7 항에 있어서,
상기 레이저 소스 및 상기 검출기는, 상기 라이다 시스템의 광학 축에 실질적으로 직교하는 적어도 제1 방향으로 동기적으로 병진운동되도록 구성되고, 그리고
상기 방출 렌즈 및 상기 수용 렌즈는, 상기 라이다 시스템의 광학 축에 실질적으로 직교하는 적어도 제2 방향으로 동기적으로 병진운동되도록 구성되는,
3-차원 이미징을 위한 라이다 시스템. - 레이저 소스 및 원통형 렌즈를 일제히 병진운동시키는 단계 ― 상기 레이저 소스는 제1 높이 및 상기 제1 높이보다 더 큰 제1 폭을 갖는 방출 영역을 갖고, 상기 원통형 렌즈는 음의 도수를 갖고 상기 레이저 소스의 앞에 위치되고, 상기 원통형 렌즈는, 상기 원통형 렌즈의 도수 축이 실질적으로 폭 방향이 되도록 배향되고, 상기 레이저 소스는 방출 평면의 복수의 방출 위치들 각각으로 병진운동됨 ― ;
상기 레이저 소스를 사용하여 복수의 레이저 펄스들을 방출하는 단계 ― 상기 복수의 레이저 펄스들 각각은 상기 복수의 방출 위치들의 개개의 방출 위치에서 방출됨 ― ;
방출 렌즈를 사용하여, 상기 복수의 레이저 펄스들을 하나 이상의 객체들을 향해 시준 및 지향시키는 단계 ― 상기 하나 이상의 객체들은 복수의 리턴 레이저 펄스들을 생성하기 위해 상기 복수의 레이저 펄스들 각각을 반사시킴 ― ;
수용 렌즈를 사용하여, 상기 복수의 리턴 레이저 펄스들 각각을 수신하고, 검출 평면의 복수의 대응하는 검출 위치들에 포커싱하는 단계 ― 각각의 대응하는 검출 위치는 개개의 방출 위치와 결합(conjugate)함 ― ;
검출기를 상기 검출 평면의 상기 복수의 대응하는 검출 위치들 각각으로 병진운동시키는 단계;
상기 검출기를 사용하여, 상기 복수의 검출 위치들의 각각의 개개의 검출 위치에서 상기 복수의 리턴 레이저 펄스들의 각각의 개개의 리턴 레이저 펄스를 검출하는 단계;
프로세서를 사용하여, 상기 복수의 리턴 레이저 펄스들 각각에 대한 비행 시간(time of flight)을 결정하는 단계; 및
상기 프로세서를 사용하여, 상기 복수의 리턴 레이저 펄스들 각각에 대한 비행 시간에 기반하여 상기 하나 이상의 객체들의 3-차원 이미지를 구성하는 단계를 포함하는,
3-차원 이미징 방법. - 제16 항에 있어서,
상기 수용 렌즈 및 상기 방출 렌즈는 동일한 렌즈를 포함하는,
3-차원 이미징 방법. - 제16 항에 있어서,
상기 원통형 렌즈는 상기 레이저 소스의 상기 방출 영역을 가상 폭 및 가상 높이를 갖는 가상 방출 영역으로 변환하도록 구성되고,
상기 가상 폭은 상기 방출 영역의 제1 폭 미만인,
3-차원 이미징 방법. - 제16 항에 있어서,
상기 레이저 소스 및 상기 검출기는 상기 방출 렌즈의 광학 축에 실질적으로 직교하는 적어도 제1 방향으로 병진운동되는,
3-차원 이미징 방법. - 제19 항에 있어서,
상기 방출 렌즈의 광학 축에 실질적으로 직교하는 적어도 제2 방향으로 상기 방출 렌즈 및 상기 수용 렌즈를 동기적으로 병진운동시키는 단계를 더 포함하는,
3-차원 이미징 방법. - 제16 항에 있어서,
상기 레이저 소스 및 상기 검출기 각각은 2개의 차원들에서 병진운동되는,
3-차원 이미징 방법. - 제21 항에 있어서,
상기 레이저 소스 및 상기 검출기 각각은 리사주 패턴으로 병진운동되도록 구성되는,
3-차원 이미징 방법. - 제16 항에 있어서,
상기 원통형 렌즈는 상기 레이저 소스와 단일 패키지로 통합되는,
3-차원 이미징 방법. - 전자기 신호를 반송(carry)하는 레이저 빔을 방출하도록 구성된 레이저 소스;
상기 레이저 빔을 상기 레이저 빔의 시야 내의 하나 이상의 객체들을 향해 시준 및 지향시키도록 구성된 방출 렌즈 ― 상기 하나 이상의 객체들은 리턴 레이저 빔을 생성하기 위해 상기 레이저 빔을 반사시킴 ― ;
상기 리턴 레이저 빔을 수신하고, 상기 수용 렌즈의 초점 평면에서의 리턴 빔 스폿으로 포커싱하도록 구성된 수용 렌즈;
상기 수용 렌즈의 초점 평면에서 어레이로서 배열된 복수의 광 센서들(photo sensors)을 포함하는 검출기 ― 각각의 개개의 광 센서는 개개의 감지 영역을 갖고, 상기 레이저 빔의 시야의 개개의 섹션에 대응하는 상기 리턴 레이저 빔의 개개의 부분을 수신하고 검출하도록 구성됨 ― ; 및
상기 레이저 소스 및 상기 검출기에 커플링된 프로세서를 포함하고,
상기 프로세서는:
상기 검출기의 상기 개개의 광 센서에서 검출된 상기 리턴 레이저 빔의 각각의 개개의 부분에 대한 개개의 비행 시간을 결정하고; 그리고
상기 리턴 레이저 빔의 각각의 개개의 부분에 대한 상기 개개의 비행 시간에 기반하여 상기 하나 이상의 객체들의 3-차원 이미지를 구성하도록 구성되는,
3-차원 이미징을 위한 라이다 시스템. - 제24 항에 있어서,
상기 복수의 광 센서들은, 상기 복수의 광 센서들의 총 감지 영역이 상기 리턴 빔 스폿과 실질적으로 매칭하도록 배열되는,
3-차원 이미징을 위한 라이다 시스템. - 제24 항에 있어서,
상기 복수의 광 센서들은 1-차원 또는 2-차원인 상기 어레이로서 배열되는,
3-차원 이미징을 위한 라이다 시스템. - 제26 항에 있어서,
상기 복수의 광 센서들은 2개의 광 센서들을 포함하는,
3-차원 이미징을 위한 라이다 시스템. - 제24 항에 있어서,
상기 방출 렌즈 및 상기 수용 렌즈는 동일한 렌즈를 포함하는,
3-차원 이미징을 위한 라이다 시스템. - 제24 항에 있어서,
제2 시야를 커버하기 위해 상기 레이저 소스에 의해 방출된 상기 레이저 빔을 스캐닝하기 위한 스캐닝 메커니즘을 더 포함하는,
3-차원 이미징을 위한 라이다 시스템. - 제29 항에 있어서,
상기 스캐닝 메커니즘은 회전 프레임을 포함하고, 상기 레이저 소스, 상기 방출 렌즈, 상기 수용 렌즈 및 상기 검출기는 상기 회전 프레임 상에 장착되는,
3-차원 이미징을 위한 라이다 시스템. - 제29 항에 있어서,
상기 스캐닝 메커니즘은 상기 레이저 빔을 반사시키도록 구성된 회전 미러 또는 MEMS(micro-electro-mechanical systems) 미러를 포함하는,
3-차원 이미징을 위한 라이다 시스템. - 제29 항에 있어서,
상기 스캐닝 메커니즘은 상기 라이다 시스템의 광학 축에 실질적으로 직교하는 평면에서 상기 방출 렌즈 및 상기 수용 렌즈를 동기적으로 병진운동시키도록 구성되는,
3-차원 이미징을 위한 라이다 시스템. - 제29 항에 있어서,
상기 스캐닝 메커니즘은:
상기 라이다 시스템의 광학 축에 실질적으로 직교하는 평면에서 상기 방출 렌즈에 대해 상기 레이저 소스를 병진운동시키고; 그리고
상기 레이저 소스의 병진운동과 동기적으로 상기 평면에서 상기 수용 렌즈에 대해 상기 검출기를 병진운동시키도록 구성되는,
3-차원 이미징을 위한 라이다 시스템. - 제29 항에 있어서,
상기 스캐닝 메커니즘은:
상기 라이다 시스템의 광학 축에 실질적으로 직교하는 평면에서 적어도 제1 방향으로 상기 레이저 소스 및 상기 검출기를 동기적으로 병진운동시키고; 그리고
상기 평면에서 적어도 제2 방향으로 상기 방출 렌즈 및 상기 수용 렌즈를 동기적으로 병진운동시키도록 구성되는,
3-차원 이미징을 위한 라이다 시스템. - 제24 항에 있어서,
상기 레이저 빔은 레이저 펄스 또는 FMCW(frequency-modulated continuous wave)를 포함하는,
3-차원 이미징을 위한 라이다 시스템. - 레이저 소스를 사용하여 레이저 펄스를 방출하는 단계;
방출 렌즈를 사용하여 상기 레이저 펄스를 상기 레이저 펄스의 시야 내의 하나 이상의 객체들을 향해 시준 및 지향시키는 단계 ― 상기 하나 이상의 객체들은 리턴 레이저 펄스를 생성하기 위해 상기 레이저 펄스를 반사시킴 ― ;
수용 렌즈를 사용하여, 상기 리턴 레이저 펄스를 수신하고, 상기 수용 렌즈의 초점 평면에서의 리턴 빔 스폿으로 포커싱하는 단계;
상기 수용 렌즈의 초점 평면에서 어레이로서 배열된 복수의 광 센서들을 포함하는 검출기를 사용하여, 각각의 개개의 광 센서에서 수신된 상기 리턴 레이저 펄스의 개개의 부분을 검출하는 단계 ― 상기 리턴 레이저 펄스의 개개의 부분은 상기 레이저 펄스의 시야의 개개의 섹션에 대응함 ― ;
상기 레이저 소스 및 상기 검출기에 커플링된 프로세서를 사용하여, 상기 리턴 레이저 펄스의 각각의 개개의 부분에 대한 비행 시간을 결정하는 단계; 및
상기 프로세서를 사용하여, 상기 리턴 레이저 펄스의 각각의 개개의 부분에 대한 상기 비행 시간에 기반하여 상기 하나 이상의 객체들의 3-차원 이미지를 구성하는 단계를 포함하는,
3-차원 이미징 방법. - 제36 항에 있어서,
각각의 개개의 광 센서는 상기 리턴 레이저 펄스의 개개의 부분을 수신하기 위한 개개의 감지 영역을 갖고, 그리고
상기 복수의 광 센서들은, 상기 복수의 광 센서들의 총 감지 영역이 상기 리턴 빔 스폿과 실질적으로 매칭하도록 배열되는,
3-차원 이미징 방법. - 제37 항에 있어서,
상기 리턴 빔 스폿은 제1 검출기 방향의 폭 및 상기 제1 검출기 방향에 직교하는 제2 검출기 방향의 높이를 갖고,
상기 높이는 상기 폭과 상이한,
3-차원 이미징 방법. - 제36 항에 있어서,
상기 복수의 광 센서들은 1-차원 또는 2-차원인 상기 어레이로서 배열되는,
3-차원 이미징 방법. - 제36 항에 있어서,
상기 방출 렌즈의 광학 축에 실질적으로 직교하는 적어도 제1 방향을 따라 복수의 방출 위치들을 통해 상기 레이저 소스를 병진운동시키는 단계; 및
적어도 상기 제1 방향을 따라 복수의 검출 위치들을 통해 상기 검출기를 병진운동시키는 단계를 더 포함하고,
상기 복수의 검출 위치들의 각각의 개개의 검출 위치는 상기 복수의 방출 위치들의 개개의 방출 위치에 대응하고,
상기 레이저 소스 및 상기 검출기는 서로에 관련하여 동기적으로 병진운동되는,
3-차원 이미징 방법. - 제36 항에 있어서,
상기 레이저 소스 및 상기 검출기 각각은 2개의 방향들을 따라 병진운동되는,
3-차원 이미징 방법. - 제36 항에 있어서,
상기 방출 렌즈의 광학 축에 실질적으로 직교하는 적어도 제1 방향을 따라 상기 레이저 소스에 대해 상기 방출 렌즈를 병진운동시키는 단계; 및
적어도 상기 제1 방향을 따라 상기 검출기에 대해 상기 수용 렌즈를 병진운동시키는 단계를 더 포함하고,
상기 방출 렌즈 및 상기 수용 렌즈는 서로에 관련하여 동기적으로 병진운동되는,
3-차원 이미징 방법. - 제42 항에 있어서,
상기 방출 렌즈 및 상기 수용 렌즈 각각은 2개의 방향들을 따라 병진운동되는,
3-차원 이미징 방법. - 제36 항에 있어서,
상기 방출 렌즈의 광학 축에 실질적으로 직교하는 적어도 제1 방향으로 상기 레이저 소스 및 상기 검출기를 동기적으로 병진운동시키는 단계; 및
상기 방출 렌즈의 광학 축에 실질적으로 직교하는 적어도 제2 방향으로 상기 방출 렌즈 및 상기 수용 렌즈를 동기적으로 병진운동시키는 단계를 더 포함하는,
3-차원 이미징 방법. - 전자기 신호를 반송하는 레이저 빔을 방출하도록 구성된 레이저 소스;
상기 레이저 빔을 상기 레이저 빔의 시야 내의 하나 이상의 객체들을 향해 시준 및 지향시키도록 구성된 렌즈 ― 상기 하나 이상의 객체들은 리턴 레이저 빔을 생성하기 위해 상기 레이저 빔을 반사시키고, 상기 렌즈는 상기 리턴 레이저 빔을 수신하고 상기 렌즈의 초점 평면에서의 리턴 빔 스폿으로 포커싱하도록 추가로 구성됨 ― ;
상기 렌즈의 초점 평면에서 어레이로서 배열된 복수의 광 센서들을 포함하는 검출기 ― 각각의 개개의 광 센서는 개개의 감지 영역을 갖고, 상기 레이저 빔의 시야의 개개의 섹션에 대응하는 상기 리턴 레이저 빔의 개개의 부분을 수신하고 검출하도록 구성됨 ― ; 및
상기 레이저 소스 및 상기 검출기에 커플링된 프로세서를 포함하고,
상기 프로세서는:
상기 검출기의 상기 개개의 광 센서에서 검출된 상기 리턴 레이저 빔의 각각의 개개의 부분에 대한 개개의 비행 시간을 결정하고; 그리고
상기 리턴 레이저 빔의 각각의 개개의 부분에 대한 상기 개개의 비행 시간에 기반하여 상기 하나 이상의 객체들의 3-차원 이미지를 구성하도록 구성되는,
3-차원 이미징을 위한 라이다 시스템.
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762593105P | 2017-11-30 | 2017-11-30 | |
| US62/593,105 | 2017-11-30 | ||
| US16/203,422 | 2018-11-28 | ||
| US16/203,430 US11592530B2 (en) | 2017-11-30 | 2018-11-28 | Detector designs for improved resolution in lidar systems |
| US16/203,430 | 2018-11-28 | ||
| US16/203,422 US11585902B2 (en) | 2017-11-30 | 2018-11-28 | Optical designs using cylindrical lenses for improved resolution in lidar systems |
| PCT/US2018/062994 WO2019108752A2 (en) | 2017-11-30 | 2018-11-29 | Optical designs and detector designs for improved resolution in lidar systems |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200093603A true KR20200093603A (ko) | 2020-08-05 |
| KR102626258B1 KR102626258B1 (ko) | 2024-01-16 |
Family
ID=66632998
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207018298A Active KR102626258B1 (ko) | 2017-11-30 | 2018-11-29 | 라이다 시스템들의 개선된 분해능을 위한 광학 설계들 및 검출기 설계들 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11592530B2 (ko) |
| EP (1) | EP3717937B1 (ko) |
| JP (1) | JP7319690B2 (ko) |
| KR (1) | KR102626258B1 (ko) |
| CN (1) | CN111566512B (ko) |
| WO (1) | WO2019108752A2 (ko) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11592530B2 (en) * | 2017-11-30 | 2023-02-28 | Cepton Technologies, Inc. | Detector designs for improved resolution in lidar systems |
| US11592527B2 (en) | 2018-02-16 | 2023-02-28 | Cepton Technologies, Inc. | Systems for incorporating LiDAR sensors in a headlamp module of a vehicle |
| CN111751838B (zh) * | 2019-03-28 | 2025-06-06 | 上海小瞳智能科技有限公司 | 一种微型固态激光雷达及其数据处理方法 |
| US11525892B2 (en) * | 2019-06-28 | 2022-12-13 | Waymo Llc | Beam homogenization for occlusion resistance |
| RU2719424C1 (ru) * | 2019-09-16 | 2020-04-17 | Александр Алексеевич Семенов | Система машинного зрения с электромагнитным отклонением луча |
| RU2762744C2 (ru) | 2019-12-23 | 2021-12-22 | Общество с ограниченной ответственностью "Яндекс Беспилотные Технологии" | СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ С ПОМОЩЬЮ ЛИДАРА (LiDAR) С ВОЛОКОННО-ОПТИЧЕСКОЙ МАТРИЦЕЙ |
| CN111413686B (zh) * | 2020-05-18 | 2025-03-11 | 武汉天眸光电科技有限公司 | 激光雷达光学系统及激光雷达 |
| US20220043124A1 (en) * | 2020-08-07 | 2022-02-10 | Uatc, Llc | Light Detection and Ranging (LIDAR) System Having Transmit Optics for Pre-Collimation Steering |
| DE102020123557A1 (de) * | 2020-09-09 | 2022-03-10 | OSRAM Opto Semiconductors Gesellschaft mit beschränkter Haftung | Optisches messsystem und verfahren zum messen einer entfernung oder einer geschwindigkeit eines objekts |
| KR102588354B1 (ko) * | 2021-03-08 | 2023-10-13 | 한국알프스 주식회사 | 스캔 성능이 향상된 광위상 배열 라이다 |
| CN113721250B (zh) * | 2021-08-30 | 2024-11-15 | 中国电子科技集团公司第四十四研究所 | 一种离散视场激光近程探测前端装置 |
| CN120233370A (zh) * | 2021-09-15 | 2025-07-01 | 上海禾赛科技有限公司 | 光发射装置、光探测装置、及激光雷达 |
| US20230176221A1 (en) * | 2021-10-06 | 2023-06-08 | Continental Autonomous Mobility US, LLC | Lidar system with reduced parallax, distortion, and defocus issues |
| CN113985386A (zh) * | 2021-12-28 | 2022-01-28 | 四川吉埃智能科技有限公司 | 一种可调式激光雷达光学接收装置 |
| CN114488193B (zh) * | 2022-01-17 | 2025-07-01 | 森思泰克河北科技有限公司 | 转镜式多线激光雷达及其设计方法 |
| JPWO2023182371A1 (ko) * | 2022-03-25 | 2023-09-28 | ||
| US12416802B2 (en) * | 2022-04-01 | 2025-09-16 | Stmicroelectronics International N.V. | Scanner laser optics for LIDAR |
| US20240125940A1 (en) * | 2022-10-12 | 2024-04-18 | Lg Innotek Co., Ltd. | Systems and methods for variable-resolution refinement of geiger mode lidar |
| CN120981756A (zh) * | 2023-12-19 | 2025-11-18 | 深圳引望智能技术有限公司 | 光学组件、光学系统和激光雷达 |
| CN119179193B (zh) * | 2024-11-26 | 2025-03-11 | 杭州视光半导体科技有限公司 | 准直柱面镜头 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20050069060A (ko) * | 2003-12-30 | 2005-07-05 | 현대자동차주식회사 | 차량 추돌 방지 시스템 |
| KR20140145482A (ko) * | 2013-06-13 | 2014-12-23 | 주식회사 만도 | 차량용 tof 카메라 |
Family Cites Families (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4203652A (en) * | 1977-02-15 | 1980-05-20 | Canon Kabushiki Kaisha | Beam shaping optical system |
| JPS606487B2 (ja) | 1977-02-15 | 1985-02-19 | キヤノン株式会社 | ビ−ム整形光学系 |
| JPH0694990A (ja) | 1992-09-11 | 1994-04-08 | Sadao Nakai | 半導体レーザ用集光光学系 |
| JPH08307006A (ja) | 1995-05-11 | 1996-11-22 | Ricoh Co Ltd | 半導体レーザ |
| US6830189B2 (en) | 1995-12-18 | 2004-12-14 | Metrologic Instruments, Inc. | Method of and system for producing digital images of objects with subtantially reduced speckle-noise patterns by illuminating said objects with spatially and/or temporally coherent-reduced planar laser illumination |
| US7028899B2 (en) * | 1999-06-07 | 2006-04-18 | Metrologic Instruments, Inc. | Method of speckle-noise pattern reduction and apparatus therefore based on reducing the temporal-coherence of the planar laser illumination beam before it illuminates the target object by applying temporal phase modulation techniques during the transmission of the plib towards the target |
| JPH11118419A (ja) | 1997-10-13 | 1999-04-30 | Oki Electric Ind Co Ltd | 変位計及び三次元形状測定器 |
| JP3169074B2 (ja) | 1998-09-25 | 2001-05-21 | 日本電気株式会社 | レーザレーダ装置 |
| US6959869B2 (en) * | 1999-06-07 | 2005-11-01 | Metrologic Instruments, Inc. | Automatic vehicle identification (AVI) system employing planar laser illumination and imaging (PLIIM) based subsystems |
| US20020135831A1 (en) | 2001-03-23 | 2002-09-26 | Park Kisoo | Anamorphic optical collimator for laser diode |
| JP3772700B2 (ja) | 2001-07-12 | 2006-05-10 | 日産自動車株式会社 | 障害物検出装置 |
| JP4205886B2 (ja) * | 2002-04-02 | 2009-01-07 | Hoya株式会社 | 光ヘッド用対物レンズ、これを用いた光ヘッドおよび光ディスク装置 |
| JP2005019804A (ja) * | 2003-06-27 | 2005-01-20 | Toyota Motor Corp | 半導体レーザ装置 |
| US20060221459A1 (en) | 2005-04-01 | 2006-10-05 | Sagan Stephen F | Optical system for projecting a line of illumination from an array of lasers |
| US7544945B2 (en) * | 2006-02-06 | 2009-06-09 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Vertical cavity surface emitting laser (VCSEL) array laser scanner |
| DE102009029364A1 (de) | 2009-09-11 | 2011-03-24 | Robert Bosch Gmbh | Messvorrichtung zur Messung einer Entfernung zwischen der Messvorrichtung und einem Zielobjekt mit Hilfe optischer Messstrahlung |
| WO2012020380A1 (en) | 2010-08-11 | 2012-02-16 | Primesense Ltd. | Scanning projectors and image capture modules for 3d mapping |
| US8596823B2 (en) * | 2010-09-07 | 2013-12-03 | Coherent, Inc. | Line-projection apparatus for arrays of diode-laser bar stacks |
| US9323063B2 (en) | 2011-04-29 | 2016-04-26 | Dhpc Technologies, Inc. | Free-space combining of laser beam radiation |
| JP5740321B2 (ja) | 2012-02-02 | 2015-06-24 | 株式会社東芝 | 距離計測装置、距離計測方法及び制御プログラム |
| CA2871502C (en) * | 2012-04-26 | 2021-06-08 | Neptec Design Group Ltd. | High speed 360 degree scanning lidar head |
| KR20140091342A (ko) | 2013-01-11 | 2014-07-21 | 삼성테크윈 주식회사 | 전방향 스캔 레이다 및 전방향 레이저 스캐닝 방법 |
| US9086273B1 (en) | 2013-03-08 | 2015-07-21 | Google Inc. | Microrod compression of laser beam in combination with transmit lens |
| US8836922B1 (en) | 2013-08-20 | 2014-09-16 | Google Inc. | Devices and methods for a rotating LIDAR platform with a shared transmit/receive path |
| US10203399B2 (en) | 2013-11-12 | 2019-02-12 | Big Sky Financial Corporation | Methods and apparatus for array based LiDAR systems with reduced interference |
| JP2016109517A (ja) | 2014-12-04 | 2016-06-20 | リコーインダストリアルソリューションズ株式会社 | レーザレーダ装置 |
| US20150192677A1 (en) * | 2014-01-03 | 2015-07-09 | Quanergy Systems, Inc. | Distributed lidar sensing system for wide field of view three dimensional mapping and method of using same |
| US10061111B2 (en) | 2014-01-17 | 2018-08-28 | The Trustees Of Columbia University In The City Of New York | Systems and methods for three dimensional imaging |
| CN104020474B (zh) * | 2014-05-06 | 2016-08-24 | 南京大学 | 一种激光三维成像光学收发系统 |
| JP6476062B2 (ja) | 2014-06-19 | 2019-02-27 | 株式会社Screenホールディングス | 光照射装置および描画装置 |
| US9854226B2 (en) * | 2014-12-22 | 2017-12-26 | Google Inc. | Illuminator for camera system having three dimensional time-of-flight capture with movable mirror element |
| US9553423B2 (en) * | 2015-02-27 | 2017-01-24 | Princeton Optronics Inc. | Miniature structured light illuminator |
| US9574936B2 (en) * | 2015-03-24 | 2017-02-21 | Sharper Shape Oy | Planar imaging sensor having plural photo detector groups with different detection windows |
| US10063849B2 (en) * | 2015-09-24 | 2018-08-28 | Ouster, Inc. | Optical system for collecting distance information within a field |
| JP6381830B2 (ja) | 2015-11-09 | 2018-08-29 | 三菱電機株式会社 | 投射光学機器及び前照灯装置 |
| WO2017095817A1 (en) | 2015-11-30 | 2017-06-08 | Luminar Technologies, Inc. | Lidar system with distributed laser and multiple sensor heads and pulsed laser for lidar system |
| US9823118B2 (en) | 2015-12-26 | 2017-11-21 | Intel Corporation | Low power, high resolution solid state LIDAR circuit |
| US10627490B2 (en) | 2016-01-31 | 2020-04-21 | Velodyne Lidar, Inc. | Multiple pulse, LIDAR based 3-D imaging |
| US10261261B2 (en) * | 2016-02-16 | 2019-04-16 | Nlight, Inc. | Passively aligned single element telescope for improved package brightness |
| CA3017817C (en) | 2016-03-21 | 2021-04-27 | Velodyne Lidar, Inc. | Lidar based 3-d imaging with varying illumination field density |
| US10451740B2 (en) * | 2016-04-26 | 2019-10-22 | Cepton Technologies, Inc. | Scanning lidar systems for three-dimensional sensing |
| US10683987B2 (en) * | 2016-04-28 | 2020-06-16 | Nichia Corporation | Light emitting device, light irradiation device including the light emitting device, and light emitting unit |
| CA3037058C (en) * | 2016-09-30 | 2024-04-02 | Magic Leap, Inc. | Projector with spatial light modulation |
| US10677896B2 (en) | 2017-06-02 | 2020-06-09 | Qualcomm Incorporated | Resolution enhancement for scanning LIDAR/LADAR |
| US11294035B2 (en) * | 2017-07-11 | 2022-04-05 | Nuro, Inc. | LiDAR system with cylindrical lenses |
| CN207037244U (zh) | 2017-08-04 | 2018-02-23 | 大连理工大学 | 一种二极管激光器光束准直的装置 |
| US11592530B2 (en) * | 2017-11-30 | 2023-02-28 | Cepton Technologies, Inc. | Detector designs for improved resolution in lidar systems |
| US20220091236A1 (en) * | 2020-08-10 | 2022-03-24 | Cepton Technologies, Inc. | Techniques for detecting and mitigating interference among multiple lidar sensors |
-
2018
- 2018-11-28 US US16/203,430 patent/US11592530B2/en active Active
- 2018-11-28 US US16/203,422 patent/US11585902B2/en active Active
- 2018-11-29 KR KR1020207018298A patent/KR102626258B1/ko active Active
- 2018-11-29 JP JP2020529120A patent/JP7319690B2/ja active Active
- 2018-11-29 CN CN201880085629.7A patent/CN111566512B/zh active Active
- 2018-11-29 EP EP18884348.6A patent/EP3717937B1/en active Active
- 2018-11-29 WO PCT/US2018/062994 patent/WO2019108752A2/en not_active Ceased
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20050069060A (ko) * | 2003-12-30 | 2005-07-05 | 현대자동차주식회사 | 차량 추돌 방지 시스템 |
| KR20140145482A (ko) * | 2013-06-13 | 2014-12-23 | 주식회사 만도 | 차량용 tof 카메라 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019108752A2 (en) | 2019-06-06 |
| CN111566512B (zh) | 2024-09-10 |
| EP3717937A2 (en) | 2020-10-07 |
| US11585902B2 (en) | 2023-02-21 |
| JP7319690B2 (ja) | 2023-08-02 |
| JP2021504707A (ja) | 2021-02-15 |
| EP3717937B1 (en) | 2026-03-04 |
| US20190162857A1 (en) | 2019-05-30 |
| CN111566512A (zh) | 2020-08-21 |
| KR102626258B1 (ko) | 2024-01-16 |
| WO2019108752A3 (en) | 2020-03-26 |
| US20190162858A1 (en) | 2019-05-30 |
| EP3717937A4 (en) | 2021-08-11 |
| US11592530B2 (en) | 2023-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102626258B1 (ko) | 라이다 시스템들의 개선된 분해능을 위한 광학 설계들 및 검출기 설계들 | |
| JP7355171B2 (ja) | 光学装置、これを用いた距離計測装置、及び移動体 | |
| US10481266B2 (en) | Multi-range three-dimensional imaging systems | |
| US11764539B2 (en) | Transmitting device for a LIDAR scanner having a scanning mirror covered by a cover element | |
| JP7505789B2 (ja) | トランシーバアレイを含むライダーシステム | |
| KR102846740B1 (ko) | 빅셀 및 이를 이용한 라이다 장치 | |
| CN110312947B (zh) | 用于检测对象的激光雷达传感器 | |
| EP3206074B1 (en) | Scanning optical system and light projection and reception device | |
| JP2022551388A5 (ko) | ||
| US20230258780A1 (en) | Light detection device | |
| US20230305113A1 (en) | Light detection device | |
| JP2019056689A (ja) | 光電センサ及び監視領域内の物体の検出方法 | |
| CN110140060A (zh) | 用于激光雷达系统的光学组件、激光雷达系统和工作装置 | |
| WO2021194887A1 (en) | Scanning lidar systems with flood illumination for near-field detection | |
| US11762066B2 (en) | Multi-beam scanning system | |
| JP7785576B2 (ja) | LiDAR装置およびLiDAR装置の制御方法 | |
| JP7647151B2 (ja) | 光走査装置、物体検出装置、センシング装置及び移動体 | |
| CN116087985A (zh) | 可变视场扫描系统及其方法 | |
| KR20250151205A (ko) | 거리 측정 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200624 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20211117 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20230627 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20231113 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20240112 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20240112 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |