KR20200093622A - 공정 디지털화 시스템 및 방법 - Google Patents
공정 디지털화 시스템 및 방법 Download PDFInfo
- Publication number
- KR20200093622A KR20200093622A KR1020207018657A KR20207018657A KR20200093622A KR 20200093622 A KR20200093622 A KR 20200093622A KR 1020207018657 A KR1020207018657 A KR 1020207018657A KR 20207018657 A KR20207018657 A KR 20207018657A KR 20200093622 A KR20200093622 A KR 20200093622A
- Authority
- KR
- South Korea
- Prior art keywords
- asset
- tracker
- object tracker
- sensor input
- identifier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images







Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/402—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by control arrangements for positioning, e.g. centring a tool relative to a hole in the workpiece, additional detection means to correct position
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/04—Manufacturing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/087—Inventory or stock management, e.g. order filling, procurement or balancing against orders
- G06Q10/0875—Itemisation or classification of parts, supplies or services, e.g. bill of materials
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/418—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM]
- G05B19/4185—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by the network communication
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
- G06Q10/06311—Scheduling, planning or task assignment for a person or group
- G06Q10/063114—Status monitoring or status determination for a person or group
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/087—Inventory or stock management, e.g. order filling, procurement or balancing against orders
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/087—Inventory or stock management, e.g. order filling, procurement or balancing against orders
- G06Q10/0877—Inventory or stock management, e.g. order filling, procurement or balancing against orders by inventory control or reporting using inventory tracking or counting
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/31—From computer integrated manufacturing till monitoring
- G05B2219/31266—Convey, transport tool to workcenter, central tool storage
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/31—From computer integrated manufacturing till monitoring
- G05B2219/31455—Monitor process status
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/34—Director, elements to supervisory
- G05B2219/34008—Asic application specific integrated circuit, single chip microcontroller
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K19/00—Record carriers for use with machines and with at least a part designed to carry digital markings
- G06K19/06—Record carriers for use with machines and with at least a part designed to carry digital markings characterised by the kind of the digital marking, e.g. shape, nature, code
- G06K19/067—Record carriers with conductive marks, printed circuits or semiconductor circuit elements, e.g. credit or identity cards also with resonating or responding marks without active components
- G06K19/07—Record carriers with conductive marks, printed circuits or semiconductor circuit elements, e.g. credit or identity cards also with resonating or responding marks without active components with integrated circuit chips
- G06K19/0723—Record carriers with conductive marks, printed circuits or semiconductor circuit elements, e.g. credit or identity cards also with resonating or responding marks without active components with integrated circuit chips the record carrier comprising an arrangement for non-contact communication, e.g. wireless communication circuits on transponder cards, non-contact smart cards or RFIDs
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/10009—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation sensing by radiation using wavelengths larger than 0.1 mm, e.g. radio-waves or microwaves
- G06K7/10297—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation sensing by radiation using wavelengths larger than 0.1 mm, e.g. radio-waves or microwaves arrangements for handling protocols designed for non-contact record carriers such as RFIDs NFCs, e.g. ISO/IEC 14443 and 18092
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/30—Computing systems specially adapted for manufacturing
Landscapes
- Business, Economics & Management (AREA)
- Engineering & Computer Science (AREA)
- Human Resources & Organizations (AREA)
- Economics (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Strategic Management (AREA)
- General Business, Economics & Management (AREA)
- Marketing (AREA)
- Theoretical Computer Science (AREA)
- Tourism & Hospitality (AREA)
- Entrepreneurship & Innovation (AREA)
- Quality & Reliability (AREA)
- Operations Research (AREA)
- Manufacturing & Machinery (AREA)
- Development Economics (AREA)
- Finance (AREA)
- Accounting & Taxation (AREA)
- General Health & Medical Sciences (AREA)
- Primary Health Care (AREA)
- Health & Medical Sciences (AREA)
- Automation & Control Theory (AREA)
- Educational Administration (AREA)
- General Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Game Theory and Decision Science (AREA)
- Testing And Monitoring For Control Systems (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- User Interface Of Digital Computer (AREA)
- Data Mining & Analysis (AREA)
- Emergency Management (AREA)
- General Factory Administration (AREA)
- Alarm Systems (AREA)
- Manipulator (AREA)
- Image Analysis (AREA)
Abstract
Description
도 2는 도 1의 시설 및 시스템의 일부의 개략적인 상면도이다;
도 3은 복수의 객체 추적기에 의해 정의되는 검출 구역을 도시하는 도 1의 시스템의 개략적인 부분도이다;
도 4는 객체 추적기의 개략적인 도면을 포함하는 도 1의 시스템의 개략적인 부분도이다;
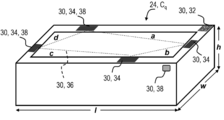
도 5는 부품 캐리어로서 구성되고 적어도 하나의 자산 식별기를 포함하는 예시적인 이동 자산의 개략적인 사시도이다;
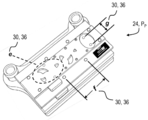
도 6은 구성 부품으로서 구성되고 적어도 하나의 자산 식별기를 포함하는 예시적인 이동 자산의 개략적인 사시도이다;
도 7은 도 1의 시스템을 위한 예시적인 데이터 흐름 및 예시적인 데이터 구조의 개략도이다;
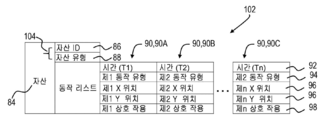
도 8은 도 7의 데이터 구조에 포함된 예시적인 자산 동작 리스트의 개략도이다;
도 9는 도 1의 시스템을 이용하여 이동 자산의 동작을 추적하고 분석하는 방법이다; 그리고
도 10은 이동 자산이 취하는 동작 시퀀스를 위한 도 1의 시스템에 의해 생성된 하트비트(heartbeat)의 예시적인 시각화 출력이다.
Claims (20)
- 시설(facility) 내에서 공정을 수행하는데 사용되는 이동 자산(mobile asset)의 동작을 추적하는 방법에 있어서,
상기 시설 내의 추적기 위치에 객체 추적기(object tracker)를 배치하는 단계; 및
상기 시설로 복수의 이동 자산을 제공하는 단계
를 포함하고;
각각의 상기 이동 자산은 상기 이동 자산에 고유한 식별기(identifier)를 포함하고;
상기 이동 자산은 데이터베이스에서 상기 식별기, 자산 ID 및 자산 유형과 연관되고;
상기 객체 추적기는 상기 추적기 위치에 상대적인 검출 구역을 정의하고;
상기 객체 추적기는,
상기 검출 구역 내에서 센서 입력을 수집하도록 구성된 센서;
상기 센서 입력을 수신하기 위하여 상기 센서와 통신하는 추적기 컴퓨터; 및
검출 시간으로 상기 센서 입력을 타임 스탬핑하고; 상기 식별기를 식별하기 위하여 상기 센서 입력을 처리하고; 상기 식별기와 연관된 상기 자산 ID 및 상기 자산 유형을 식별하기 위하여 상기 식별기를 처리하고; 그리고, 상기 자산 ID, 상기 자산 유형 및 상기 검출 시간을 포함하는 자산 엔트리(asset entry)를 생성하기 위한 적어도 하나의 알고리즘
을 포함하고,
상기 방법은,
상기 센서를 통해, 상기 센서 입력을 수집하는 단계 - 상기 센서 입력을 수집하는 단계는 상기 이동 자산이 상기 검출 구역 내에 위치될 때 상기 식별기를 검출하는 단계를 포함함 -;
상기 추적기 컴퓨터를 통해, 상기 센서 입력을 수신하는 단계;
상기 추적기 컴퓨터를 통해, 검출 시간으로 상기 센서 입력을 타임 스탬핑하는 단계;
상기 추적기 컴퓨터를 통해, 상기 식별기를 식별하기 위하여 상기 센서 입력을 처리하는 단계;
상기 추적기 컴퓨터를 통해, 상기 식별기와 연관된 상기 자산 ID 및 상기 자산 유형을 식별하기 위하여 상기 식별기를 처리하는 단계; 및
상기 추적기 컴퓨터를 통해, 상기 자산 엔트리를 생성하는 단계
를 더 포함하는, 방법. - 제1항에 있어서,
상기 추적기 컴퓨터는 네트워크를 통해 중앙 데이터 브로커와 통신하고,
상기 방법은,
상기 객체 추적기를 이용하여 상기 자산 엔트리를 디지털화하는 단계;
상기 네트워크를 통해 상기 자산 엔트리를 상기 중앙 데이터 브로커에 전송하는 단계;
상기 중앙 데이터 브로커를 이용하여 상기 자산 엔트리를 자산 동작 리스트로 매핑하는 단계; 및
상기 자산 동작 리스트를 상기 데이터베이스에 저장하는 단계
를 더 포함하고,
상기 자산 엔트리 및 상기 자산 동작 리스트는 각각 상기 식별기와 연관된 상기 자산 ID 및 상기 자산 유형과 연관되는, 방법. - 제2항에 있어서,
상기 데이터베이스와 통신하는 분석기(analyst)를 통해, 상기 자산 동작 리스트를 분석하는 단계
를 더 포함하고,
상기 자산 동작 리스트를 분석하는 단계는,
상기 자산 동작 리스트에 의해 정의되는 동작 이벤트를 판단하는 단계; 및
상기 동작 이벤트의 동작 이벤트 지속 시간을 판단하는 단계
를 포함하는, 방법. - 제3항에 있어서,
상기 분석기를 통해, 상기 자산 동작 리스트에 의해 정의되는 추적 맵(tracking map)을 생성하는 단계
를 더 포함하고,
상기 추적 맵은 상기 자산 ID 및 상기 자산 유형을 통해 상기 자산 동작 리스트와 연관되는 상기 이동 자산에 의해 수행되는 적어도 하나의 동작을 시각적으로 디스플레이하는, 방법. - 제3항에 있어서,
상기 분석기를 통해, 상기 자산 동작 리스트에 의해 정의되는 하트비트(heartbeat)를 생성하는 단계
를 더 포함하고,
상기 하트비트는 상기 동작 이벤트 지속 시간과 상기 동작 이벤트를 시각적으로 디스플레이하는, 방법. - 제5항에 있어서,
상기 자산 동작 리스트를 분석하는 단계는,
상기 자산 동작 리스트에 의해 정의되는 복수의 동작 이벤트를 판단하는 단계;
상기 복수의 동작 이벤트의 각각의 동작 이벤트에 대한 해당하는 동작 이벤트 지속 시간을 판단하는 단계;
상기 복수의 동작 이벤트를 발생 시간에 따른 순서로 정렬하는 단계; 및
상기 분석기를 통해, 상기 하트비트를 생성하는 단계
를 포함하고,
상기 하트비트는 상기 복수의 동작 이벤트의 각각의 상기 해당하는 동작 이벤트 지속 시간 및 상기 동작 이벤트를 상기 순서로 시각적으로 디스플레이하는, 방법. - 제1항에 있어서,
상기 센서는 카메라를 포함하고,
상기 센서 입력은 상기 카메라에 의해 수집된 상기 검출 구역의 이미지인, 방법. - 제7항에 있어서,
상기 카메라는 적외선 민감형 카메라인, 방법. - 제7항에 있어서,
상기 카메라는 열화상(thermographic) 적외선 민감형 카메라인, 방법. - 제1항에 있어서,
상기 센서는 RFID 리더를 포함하고;
상기 식별기는 RFID 태그를 포함하고; 그리고,
상기 센서 입력은 상기 RFID 리더에 의해 상기 RFID 태그로부터 판독된 RFID 데이터인, 방법. - 제1항에 있어서,
상기 이동 자산은 패턴으로 배열된 복수의 라벨을 포함하고,
상기 패턴은 상기 식별기를 정의하는, 방법. - 제1항에 있어서,
상기 객체 추적기는 상기 객체 추적기가 제자리에 고정되도록 상기 시설의 구조에 부착되는, 방법. - 제1항에 있어서,
상기 객체 추적기는 상기 객체 추적기가 이동할 수 있도록 상기 이동 자산 중 하나에 부착되는, 방법. - 제1항에 있어서,
상기 객체 추적기는 상기 검출 시간에 상기 이동 자산의 상호 작용을 식별하기 위하여 상기 센서 입력을 처리하기 위한 적어도 하나의 알고리즘을 포함하고,
상기 방법은,
상기 추적기 컴퓨터를 통해, 상기 상호 작용을 식별하기 위하여 상기 센서 입력을 처리하는 단계; 및
상기 상호 작용을 상기 자산 엔트리에 입력하는 단계
를 더 포함하는, 방법. - 제1항에 있어서,
상기 객체 추적기는 상기 검출 시간에 상기 이동 자산의 위치를 식별하기 위하여 상기 센서 입력을 처리하기 위한 적어도 하나의 알고리즘을 포함하고,
상기 방법은,
상기 추적기 컴퓨터를 통해, 상기 위치를 식별하기 위하여 상기 센서 입력을 처리하는 단계; 및
상기 위치를 상기 자산 엔트리에 입력하는 단계
를 더 포함하는, 방법. - 제1항에 있어서,
상기 객체 추적기는 복수의 객체 추적기 중 하나이고; 그리고,
상기 객체 추적기의 각각의 객체 추적기는 상기 추적기 위치에 상대적인 검출 구역을 정의하고;
상기 방법은,
상기 객체 추적기 각각을 상기 시설 내의 해당하는 추적기 위치에 배치하는 단계
를 더 포함하고,
상기 객체 추적기의 각각의 객체 추적기의 상기 검출 구역은 상기 객체 추적기의 적어도 하나의 다른 객체 추적기의 상기 검출 구역과 중첩하는, 방법. - 제1항에 있어서,
상기 복수의 이동 자산은,
적어도 하나의 구성 부품(component part); 및
적어도 하나의 부품 캐리어(part carrier)
를 포함하는, 방법. - 제1항에 있어서,
상기 이동 자산은 적어도 하나의 구성 부품을 운반하도록 구성된 부품 캐리어이고,
상기 객체 추적기는 상기 적어도 하나의 부품 캐리어에 의해 운반되는 구성 부품의 양을 판단하기 위하여 상기 센서 입력을 처리하기 위한 적어도 하나의 알고리즘을 포함하고,
상기 방법은,
상기 추적기 컴퓨터를 통해, 상기 구성 부품의 양을 판단하기 위하여 상기 센서 입력을 처리하는 단계; 및
상기 양을 상기 자산 엔트리로 입력하는 단계
를 더 포함하는, 방법. - 제1항에 있어서,
상기 이동 자산은 구성 부품이고,
상기 객체 추적기는 상기 센서 입력을 이용하여 상기 구성 부품에 대한 검사 결과를 판단하기 위하여 상기 센서 입력을 처리하기 위한 적어도 하나의 알고리즘을 포함하고,
상기 방법은,
상기 추적기 컴퓨터를 통해, 상기 검사 결과를 판단하기 위하여 상기 센서 입력을 처리하는 단계; 및
상기 검사 결과를 상기 자산 엔트리로 입력하는 단계
를 더 포함하는, 방법. - 시설 내에서 공정을 수행하는데 사용되는 이동 자산(mobile asset)의 동작을 추적하는 시스템에 있어서,
상기 시설 내의 추적기 위치에 배치된 객체 추적기(object tracker); 및
상기 시설 내에 위치된 복수의 이동 자산
을 포함하고;
각각의 상기 이동 자산은 상기 이동 자산에 고유한 식별기(identifier)를 포함하고;
상기 이동 자산은 데이터베이스에서 상기 식별기, 자산 ID 및 자산 유형과 연관되고;
상기 객체 추적기는 상기 추적기 위치에 상대적인 검출 구역을 정의하고;
상기 객체 추적기는,
상기 검출 구역 내에서 센서 입력을 수집하도록 구성된 센서 - 상기 센서 입력을 수집하는 것은 상기 이동 자산이 상기 검출 구역 내에 위치될 때 상기 식별기를 검출하는 것을 포함함 -;
상기 센서 입력을 수신하기 위하여 상기 센서와 통신하는 추적기 컴퓨터; 및
검출 시간으로 상기 센서 입력을 타임 스탬핑하고; 상기 식별기를 식별하기 위하여 상기 센서 입력을 처리하고; 상기 식별기와 연관된 상기 자산 ID 및 상기 자산 유형을 식별하기 위하여 상기 식별기를 처리하고; 그리고, 상기 자산 ID, 상기 자산 유형 및 상기 검출 시간을 포함하는 자산 엔트리(asset entry)를 생성하기 위한 적어도 하나의 알고리즘
을 포함하는, 시스템.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862621709P | 2018-01-25 | 2018-01-25 | |
| US201862621623P | 2018-01-25 | 2018-01-25 | |
| US62/621,709 | 2018-01-25 | ||
| US62/621,623 | 2018-01-25 | ||
| PCT/US2019/014930 WO2019147792A2 (en) | 2018-01-25 | 2019-01-24 | Process digitization system and method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200093622A true KR20200093622A (ko) | 2020-08-05 |
Family
ID=67394798
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207018657A Ceased KR20200093622A (ko) | 2018-01-25 | 2019-01-24 | 공정 디지털화 시스템 및 방법 |
| KR1020207020986A Expired - Fee Related KR102360597B1 (ko) | 2018-01-25 | 2019-01-25 | 분산 자동 제어 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207020986A Expired - Fee Related KR102360597B1 (ko) | 2018-01-25 | 2019-01-25 | 분산 자동 제어 |
Country Status (6)
| Country | Link |
|---|---|
| US (4) | US20200326680A1 (ko) |
| EP (2) | EP3743864A4 (ko) |
| JP (2) | JP7264508B2 (ko) |
| KR (2) | KR20200093622A (ko) |
| CN (2) | CN111902834A (ko) |
| WO (2) | WO2019147792A2 (ko) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3743864A4 (en) * | 2018-01-25 | 2021-10-20 | BEET, Inc. | SYSTEM AND DEVICE FOR DIGITIZING A PROCESS |
| US12613514B2 (en) * | 2018-06-14 | 2026-04-28 | Gestamp Automoción, S.A. | Quality monitoring of industrial processes |
| WO2020005993A1 (en) * | 2018-06-25 | 2020-01-02 | X Development Llc | Robot coordination in a shared workspace |
| SE1951286A1 (en) * | 2019-11-08 | 2021-05-09 | Ewab Eng Ab | Production systems |
| US11823180B1 (en) * | 2020-05-20 | 2023-11-21 | Wells Fargo Bank, N.A. | Distributed ledger technology utilizing asset tracking |
| CN111674800B (zh) * | 2020-06-03 | 2021-07-09 | 灵动科技(北京)有限公司 | 用于自动驾驶系统的智能仓储技术 |
| WO2023018999A1 (en) * | 2021-08-13 | 2023-02-16 | Beet, Inc. | Process digitization system and method |
| US12499403B2 (en) * | 2021-11-25 | 2025-12-16 | Arye Houminer | Systems and methods for providing insight regarding retail store performance and store layout |
| WO2023150690A2 (en) * | 2022-02-03 | 2023-08-10 | Beet, Inc. | Method and system for dynamic mapping of production line asset conditions |
| US12079732B2 (en) * | 2022-03-14 | 2024-09-03 | Dell Products L.P. | Cross-organization continuous update of edge-side event detection models in warehouse environments via federated learning |
| DE102022116398A1 (de) * | 2022-06-30 | 2024-01-04 | Still Gesellschaft Mit Beschränkter Haftung | Automatische Lokalisierung eines Ladungsträgers |
| DE102022116397A1 (de) * | 2022-06-30 | 2024-01-04 | Still Gesellschaft Mit Beschränkter Haftung | Automatische Erkennung eines Beladungszustandes eines Ladungsträgers |
| CN116760955B (zh) * | 2023-08-18 | 2023-10-31 | 张家港保税区恒隆钢管有限公司 | 一种用于无缝钢管生产的信息跟踪系统 |
| CN119922224B (zh) * | 2025-01-02 | 2025-09-30 | 杭州电子科技大学 | 一种基于模块化配置的工业时序数据解析方法 |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003167613A (ja) | 2001-11-30 | 2003-06-13 | Sharp Corp | 作業管理システム、作業管理方法、及びその方法を実現するためのプログラムを記憶した記録媒体 |
| US8339265B2 (en) * | 2002-01-09 | 2012-12-25 | Sensormatic Electronics, Llc. | Method of assigning and deducing the location of articles detected by multiple RFID antennae |
| US7809676B2 (en) * | 2002-05-29 | 2010-10-05 | Oracle International Corporation | Rules engine for warehouse management systems |
| CN100440088C (zh) | 2002-10-29 | 2008-12-03 | 东京毅力科创株式会社 | 作业者管理系统、作业者管理装置和作业者管理方法 |
| US6998987B2 (en) * | 2003-02-26 | 2006-02-14 | Activseye, Inc. | Integrated RFID and video tracking system |
| KR100526824B1 (ko) | 2003-06-23 | 2005-11-08 | 삼성전자주식회사 | 실내환경조절시스템 및 그 제어방법 |
| JP4373901B2 (ja) | 2004-12-10 | 2009-11-25 | 株式会社東芝 | 情報提供サーバおよびアラート情報表示プログラム |
| JP4583183B2 (ja) | 2005-01-07 | 2010-11-17 | 住友ナコ マテリアル ハンドリング株式会社 | 作業車両管理システム |
| JP4815956B2 (ja) | 2005-09-06 | 2011-11-16 | オムロン株式会社 | 作業監視装置、フィルタリング方法、作業時間計測システム、制御プログラム、および記録媒体 |
| KR100702147B1 (ko) | 2006-04-03 | 2007-03-30 | 한국전력공사 | 전력선통신을 이용한 로봇관제 시스템 및 그 방법 |
| US8175925B1 (en) * | 2006-08-18 | 2012-05-08 | Amazon Technologies, Inc. | Position-based item identification in a materials handling facility |
| JP5142562B2 (ja) * | 2007-03-19 | 2013-02-13 | セコム株式会社 | 物品監視システム |
| JP2009075941A (ja) * | 2007-09-21 | 2009-04-09 | Hitachi Ltd | 工程管理方法、工程管理システムおよび工程管理装置 |
| JP5125532B2 (ja) * | 2008-01-16 | 2013-01-23 | トヨタ自動車株式会社 | データ送信装置、電子制御ユニット及びデータ伝送装置 |
| JP5269489B2 (ja) | 2008-06-03 | 2013-08-21 | ヤマトパッキングサービス株式会社 | 輸出品梱包・通関処理工場のレイアウト |
| JP2010015288A (ja) * | 2008-07-02 | 2010-01-21 | Ihi Corp | ジョブショップ型方式におけるワークの工程管理方法と装置 |
| JP2012513708A (ja) * | 2008-12-22 | 2012-06-14 | トムソン ライセンシング | 帯域幅制約ネットワークを介してサーバ・システムの監視および制御を行うシステムおよび方法 |
| US8344879B2 (en) * | 2009-04-15 | 2013-01-01 | Trimble Navigation Limited | Asset management systems and methods |
| US20110055172A1 (en) * | 2009-09-01 | 2011-03-03 | Containertrac, Inc. | Automatic error correction for inventory tracking and management systems used at a shipping container yard |
| US8477021B2 (en) * | 2010-10-25 | 2013-07-02 | John Slack | Worksite proximity warning and collision avoidance system |
| US9218628B2 (en) * | 2011-01-24 | 2015-12-22 | Beet, Llc | Method and system for generating behavior profiles for device members of a network |
| JP2012203770A (ja) | 2011-03-28 | 2012-10-22 | Hitachi Chem Co Ltd | 作業分析システム |
| US8880442B2 (en) | 2011-06-03 | 2014-11-04 | Beet, Llc | Method for generating a machine heartbeat |
| US9928130B2 (en) * | 2011-06-03 | 2018-03-27 | Beet, Llc | Method for generating a machine heartbeat |
| JP5263339B2 (ja) | 2011-06-14 | 2013-08-14 | オムロン株式会社 | データ収集システム、解析装置、解析方法、およびプログラム |
| KR20130010183A (ko) | 2011-07-18 | 2013-01-28 | 대우조선해양 주식회사 | 전력선 통신을 이용한 로봇 시스템 |
| US8983630B2 (en) * | 2011-12-01 | 2015-03-17 | Honeywell International Inc. | Real time event viewing across distributed control system servers |
| FR2983611A1 (fr) * | 2011-12-02 | 2013-06-07 | Ier Systems | Procede et systeme d'affectation d'une tache a realiser a un operateur parmi une pluralite d'operateurs, et installation de location automatisee de vehicules mettant en oeuvre un tel procede et systeme. |
| US9305196B2 (en) * | 2012-05-22 | 2016-04-05 | Trimble Navigation Limited | Entity tracking |
| US9425978B2 (en) * | 2012-06-27 | 2016-08-23 | Ubiquiti Networks, Inc. | Method and apparatus for configuring and controlling interfacing devices |
| US8950671B2 (en) * | 2012-06-29 | 2015-02-10 | Toshiba Global Commerce Solutions Holdings Corporation | Item scanning in a shopping cart |
| US20140070939A1 (en) * | 2012-09-12 | 2014-03-13 | Michael Halverson | Interactive wireless life safety communications system |
| US20140222522A1 (en) * | 2013-02-07 | 2014-08-07 | Ibms, Llc | Intelligent management and compliance verification in distributed work flow environments |
| US20140266612A1 (en) * | 2013-03-12 | 2014-09-18 | Novatel Wireless, Inc. | Passive near field id for correlating asset with mobile tracker |
| US20160183351A1 (en) | 2013-03-25 | 2016-06-23 | Ids-Ip Holdings Llc | System, method, and apparatus for powering intelligent lighting networks |
| WO2015110324A1 (en) | 2014-01-22 | 2015-07-30 | Koninklijke Philips N.V. | Power distribution system with low complexity and low power consumption |
| AT514309A2 (de) * | 2014-07-31 | 2014-11-15 | Avl List Gmbh | System zur Erfassung eines Bestandes an Überwachungsobjekten einer Anlage |
| JP6488647B2 (ja) * | 2014-09-26 | 2019-03-27 | 日本電気株式会社 | 物体追跡装置、物体追跡システム、物体追跡方法、表示制御装置、物体検出装置、プログラムおよび記録媒体 |
| JP6822061B2 (ja) | 2015-11-13 | 2021-01-27 | 株式会社リコー | 情報処理装置、情報処理方法、情報処理システム及びプログラム |
| KR101645139B1 (ko) | 2015-11-27 | 2016-08-03 | 정용호 | 작업현장 관리 시스템 및 그 구동방법 |
| GB2550326B (en) * | 2016-04-26 | 2020-04-15 | Inventor E Ltd | Asset tag and method and device for asset tracking |
| US20170308845A1 (en) * | 2016-04-26 | 2017-10-26 | Inventor-E Limited | Asset tag and method and device for asset tracking |
| MX2018015107A (es) * | 2016-06-08 | 2019-09-02 | Commw Scient Ind Res Org | Sistema para monitorizar la ingesta de pasto. |
| JP3211308U (ja) * | 2017-04-03 | 2017-07-06 | 村瀬 徹 | 拡張現実システム |
| EP3743864A4 (en) * | 2018-01-25 | 2021-10-20 | BEET, Inc. | SYSTEM AND DEVICE FOR DIGITIZING A PROCESS |
| US20210350318A1 (en) * | 2020-05-05 | 2021-11-11 | Data Telematics, LLC | System and computer program for real-time location tracking and monitoring of product containers |
-
2019
- 2019-01-24 EP EP19744304.7A patent/EP3743864A4/en not_active Withdrawn
- 2019-01-24 US US16/957,604 patent/US20200326680A1/en not_active Abandoned
- 2019-01-24 JP JP2020540803A patent/JP7264508B2/ja active Active
- 2019-01-24 CN CN201980021426.6A patent/CN111902834A/zh active Pending
- 2019-01-24 KR KR1020207018657A patent/KR20200093622A/ko not_active Ceased
- 2019-01-24 WO PCT/US2019/014930 patent/WO2019147792A2/en not_active Ceased
- 2019-01-25 KR KR1020207020986A patent/KR102360597B1/ko not_active Expired - Fee Related
- 2019-01-25 JP JP2020540795A patent/JP7170343B2/ja active Active
- 2019-01-25 WO PCT/US2019/015308 patent/WO2019148053A1/en not_active Ceased
- 2019-01-25 US US16/957,876 patent/US11175644B2/en not_active Expired - Fee Related
- 2019-01-25 CN CN201980021576.7A patent/CN111937015A/zh active Pending
- 2019-01-25 EP EP19744313.8A patent/EP3743858A4/en not_active Withdrawn
-
2021
- 2021-10-11 US US17/498,341 patent/US11599082B2/en active Active
-
2023
- 2023-12-06 US US18/531,046 patent/US20240168452A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019148053A1 (en) | 2019-08-01 |
| US11599082B2 (en) | 2023-03-07 |
| EP3743858A1 (en) | 2020-12-02 |
| US20240168452A1 (en) | 2024-05-23 |
| WO2019147792A2 (en) | 2019-08-01 |
| US20200341458A1 (en) | 2020-10-29 |
| JP2021512408A (ja) | 2021-05-13 |
| CN111937015A (zh) | 2020-11-13 |
| EP3743864A4 (en) | 2021-10-20 |
| WO2019147792A3 (en) | 2020-04-16 |
| EP3743858A4 (en) | 2021-11-03 |
| JP2021511603A (ja) | 2021-05-06 |
| KR102360597B1 (ko) | 2022-02-09 |
| EP3743864A2 (en) | 2020-12-02 |
| JP7264508B2 (ja) | 2023-04-25 |
| JP7170343B2 (ja) | 2022-11-14 |
| CN111902834A (zh) | 2020-11-06 |
| KR20200101427A (ko) | 2020-08-27 |
| US11175644B2 (en) | 2021-11-16 |
| US20200326680A1 (en) | 2020-10-15 |
| US20220026872A1 (en) | 2022-01-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20240168452A1 (en) | Process digitization system and method | |
| JP7074965B2 (ja) | 金属処理産業における内部個人位置特定に基づく製造制御 | |
| US20230009212A1 (en) | Process digitization system and method | |
| US20150066550A1 (en) | Flow line data analysis device, system, non-transitory computer readable medium and method | |
| CN105046468A (zh) | 基于物联网的智能仓储方法 | |
| JP5915731B2 (ja) | 動線データ解析装置、システム、プログラム及び方法 | |
| US20190243345A1 (en) | Control of manufacturing processes in metal processing industry | |
| CN118761712B (zh) | 基于物联网的智能仓储管理方法、装置、设备及存储介质 | |
| JP2020532793A (ja) | 屋内位置特定システムの移動可能ユニットへの加工片の割り当て支援方法 | |
| KR20150028799A (ko) | 제조 설비의 감시 장치 및 감시 방법 | |
| JP2020532798A (ja) | 屋内位置特定システムの移動可能ユニットの移動可能ユニットデータセットに対する処理計画の画像の支援を受けた割り当て方法 | |
| CN104590801A (zh) | 一种基于物联网的仓储系统 | |
| JP2012218861A (ja) | 荷物運搬車両作業動線画像表示システム、画面表示装置及び画面表示方法 | |
| JP6832862B2 (ja) | 移動経路管理システム、移動経路管理方法、移動経路管理装置、及びプログラム | |
| CN104899714A (zh) | 仓储货物状态数据的重构装置与系统 | |
| JP2018092464A (ja) | 物品所在管理システムおよびタグ情報読取端末装置 | |
| CN204355617U (zh) | 一种基于物联网的仓储系统 | |
| Borstell et al. | Pallet monitoring system based on a heterogeneous sensor network for transparent warehouse processes | |
| WO2023018999A1 (en) | Process digitization system and method | |
| CN205281565U (zh) | 仓储货物状态数据的重构装置与系统 | |
| KR102738435B1 (ko) | 공정 간 결함 정보를 통합 및 관리하는 서버 및 이를 포함하는 시스템 | |
| JP2026002572A (ja) | 情報処理装置、情報処理システム、情報処理方法及びプログラム | |
| TWI665615B (zh) | 物料之領取及儲放方法 | |
| Aryal | Integrating Camera Recognition and RFID System for Assets Tracking And Warehouse Management | |
| CN121436935A (zh) | 放射源管理系统及方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| AMND | Amendment | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T13-X000 | Administrative time limit extension granted |
St.27 status event code: U-3-3-T10-T13-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T13-X000 | Administrative time limit extension granted |
St.27 status event code: U-3-3-T10-T13-oth-X000 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0901 | Re-examination |
St.27 status event code: A-2-3-E10-E12-rex-PX0901 |
|
| PX0601 | Decision of rejection after re-examination |
St.27 status event code: N-2-6-B10-B17-rex-PX0601 |
|
| X601 | Decision of rejection after re-examination | ||
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |