KR20200093641A - 운전 상태 표시 방법 및 운전 상태 표시 시스템 - Google Patents
운전 상태 표시 방법 및 운전 상태 표시 시스템 Download PDFInfo
- Publication number
- KR20200093641A KR20200093641A KR1020207019261A KR20207019261A KR20200093641A KR 20200093641 A KR20200093641 A KR 20200093641A KR 1020207019261 A KR1020207019261 A KR 1020207019261A KR 20207019261 A KR20207019261 A KR 20207019261A KR 20200093641 A KR20200093641 A KR 20200093641A
- Authority
- KR
- South Korea
- Prior art keywords
- display
- echo
- level
- power consumption
- driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/46—Series type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/22—Display screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/29—Instruments characterised by the way in which information is handled, e.g. showing information on plural displays or prioritising information according to driving conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/60—Instruments characterised by their location or relative disposition in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/80—Arrangements for controlling instruments
- B60K35/81—Arrangements for controlling instruments for controlling displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/13—Maintaining the SoC within a determined range
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/15—Control strategies specially adapted for achieving a particular effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/172—Driving mode indication
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/174—Economic driving
-
- B60K2370/152—
-
- B60K2370/174—
-
- B60K2370/1868—
-
- B60K2370/52—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/214—Variable gauge scales, e.g. scale enlargement to adapt to maximum driving speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/16—Driver interactions by display
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0666—Engine power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/081—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/085—Power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/91—Electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/80—Technologies aiming to reduce greenhouse gasses emissions common to all road transportation technologies
- Y02T10/84—Data processing systems or methods, management, administration
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Sustainable Development (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Energy (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Instrument Panels (AREA)
- Hybrid Electric Vehicles (AREA)
Abstract
Description
도 2는 본 실시 형태의 운전 상태 표시 시스템에 따른 미터 패널의 표시 양태를 설명하는 도면이다.
도 3a는 에코 레벨 게이지의 표시 A를 도시하는 도면이다.
도 3b는 에코 레벨 게이지의 표시 B를 도시하는 도면이다.
도 3c는 에코 레벨 게이지의 표시 C를 도시하는 도면이다.
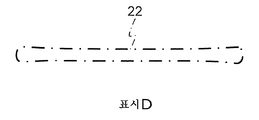
도 3d는 에코 레벨 게이지의 표시 D를 도시하는 도면이다.
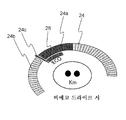
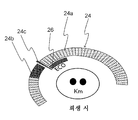
도 4a는 파워 미터 및 에코 판정 게이지의 표시 패턴예를 설명하는 도면이다.
도 4b는 파워 미터 및 에코 판정 게이지의 표시 패턴예를 설명하는 도면이다.
도 4c는 파워 미터 및 에코 판정 게이지의 표시 패턴예를 설명하는 도면이다.
도 4d는 파워 미터 및 에코 판정 게이지의 표시 패턴예를 설명하는 도면이다.
도 5는 본 실시 형태의 운전 상태 표시 시스템의 기능을 설명하는 블록도이다.
도 6은 운전 상태 표시 방법의 흐름을 설명하는 흐름도이다.
도 7은 에코 레벨 설정 맵을 나타내는 도면이다.
도 8은 소비 전력 역치 설정 맵을 나타내는 도면이다.
도 9a는 전동 차량의 운전 상태에 따른 미터 패널의 표시 양태를 설명하는 도면이다.
도 9b는 전동 차량의 운전 상태에 따른 미터 패널의 표시 양태를 설명하는 도면이다.
도 9c는 전동 차량의 운전 상태에 따른 미터 패널의 표시 양태를 설명하는 도면이다.
도 9d는 전동 차량의 운전 상태에 따른 미터 패널의 표시 양태를 설명하는 도면이다.
도 9e는 전동 차량의 운전 상태에 따른 미터 패널의 표시 양태를 설명하는 도면이다.
도 10은 본 실시 형태의 변형예에 따른 미터 패널의 표시 양태를 설명하는 도면이다.
Claims (6)
- 배터리로부터 주행 모터에 구동 전력을 공급하는 전동 차량에 있어서의 운전 상태 표시 방법이며,
상기 전동 차량의 차속 및 상기 주행 모터의 출력에 기초하여, 상기 전동 차량의 운전 상태에 대한 에코 레벨을 설정하는 에코 레벨 설정 공정과,
상기 에코 레벨에 따라 신축하는 에코 레벨 게이지를 차실 내에 표시하는 표시 공정을 갖는,
운전 상태 표시 방법. - 제1항에 있어서,
상기 전동 차량의 소비 전력을 연산하는 소비 전력 연산 공정을 더 갖고,
상기 표시 공정에서는, 상기 소비 전력에 따라 눈금수가 증감하는 파워 미터를 상기 에코 레벨 게이지와 함께 표시하는,
운전 상태 표시 방법. - 제2항에 있어서,
상기 전동 차량의 운전 상태가 에코 드라이브 상태라고 판단하기 위한 상기 소비 전력의 역치를 설정하는 소비 전력 역치 설정 공정과,
상기 소비 전력의 역치에 상당하는 상기 파워 미터의 눈금수의 길이를 나타내는 에코 판정 게이지를 설정하는 에코 판정 게이지 설정 공정을 더 갖고,
상기 표시 공정에서는 상기 에코 판정 게이지를 상기 파워 미터에 병렬시켜 표시하는,
운전 상태 표시 방법. - 제3항에 있어서,
상기 에코 레벨 설정 공정에서는,
상기 전동 차량의 차속 및 상기 주행 모터의 출력과, 상기 에코 레벨이 소정 레벨임을 판정하기 위한 에코 레벨 판정값의 관계를 미리 규정한 에코 레벨 판정 맵을 참조하여, 상기 전동 차량의 차속 및 상기 주행 모터의 출력으로부터 상기 에코 레벨을 설정하고,
상기 소비 전력 역치 설정 공정에서는,
상기 전동 차량의 차속과 상기 소비 전력의 역치 관계를 미리 규정한 소비 전력 역치 설정 맵을 참조하여, 상기 전동 차량의 차속에 기초하여 상기 소비 전력의 역치를 설정하고,
상기 에코 레벨 판정 맵 및 상기 소비 전력 역치 설정 맵은, 상기 에코 레벨 판정값 및 상기 소비 전력의 역치가 동일한 차속에 대하여 상호 간에 일치하도록 정해지는,
운전 상태 표시 방법. - 엔진의 동력을 이용하여 배터리를 충전 가능한 발전기와, 상기 배터리로부터 주행 모터에 구동 전력을 공급하고, 액셀러레이터 조작량에 따른 모터 출력을 적어도 2단계로 선택 변경 가능한 하이브리드 차량에 탑재되는 운전 상태 표시 시스템이며,
상기 하이브리드 차량의 주행 모드를 전환하는 모드 전환 스위치와,
상기 하이브리드 차량의 드라이버에게 시인 가능하게 마련되고, 상기 주행 모터의 전력 소비 효율이 조금이라도 높은 운전 상태를 나타내는 제1 표시와, 상기 제1 표시보다 전력 소비 효율이 낮은 운전 상태를 나타내는 제2 표시를 전환하여 표시하는 에코 레벨 표시기와,
상기 드라이버에게 시인 가능하게 마련되고, 상기 모터 출력을 나타내는 영역을 표시하는 파워 미터 표시기와,
상기 에코 레벨 표시기와 파워 미터 표시기의 표시 상태를 제어하는 표시 컨트롤러를 구비하고,
상기 표시 컨트롤러는,
상기 모터 출력에 관한 값을 산출하는 주행 모터 출력 산정부와,
상기 모터 출력에 관한 역치를 설정하고, 차속이 낮을 때에 비해 차속이 높을 때의 상기 역치를 크게 설정하는 모터 출력 역치 설정부와,
상기 모터 출력에 관한 값이 상기 역치보다 작을 때는 상기 제1 표시를 상기 에코 레벨 표시기에 표시시키고, 상기 모터 출력에 관한 값이 상기 역치보다 클 때는 상기 제2 표시를 상기 에코 레벨 표시기에 표시시키는 에코 레벨 표시 제어부와,
상기 모터 출력에 관한 영역에, 해당 모터 출력에 관한 값을 표시함과 함께, 상기 역치를 상기 모터 출력에 관한 값과 비교 가능하게 표시하는 파워 미터 표시 제어부를 갖는,
운전 상태 표시 시스템. - 제5항에 있어서,
상기 모터 출력 역치 설정부는, 차속이 낮을 때에 비해 차속이 높을 때의 상기 역치를 크게 설정하고,
상기 파워 미터 표시 제어부는, 상기 역치가 변경되었을 때 파워 미터 표시기의 역치 표시를 변경하는,
운전 상태 표시 시스템.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/045211 WO2019116577A1 (ja) | 2017-12-15 | 2017-12-15 | 運転状態表示方法及び運転状態表示システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200093641A true KR20200093641A (ko) | 2020-08-05 |
| KR102417575B1 KR102417575B1 (ko) | 2022-07-08 |
Family
ID=66819087
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207019261A Expired - Fee Related KR102417575B1 (ko) | 2017-12-15 | 2017-12-15 | 운전 상태 표시 방법 및 운전 상태 표시 시스템 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US11505070B2 (ko) |
| EP (1) | EP3725579B1 (ko) |
| JP (1) | JP6897795B2 (ko) |
| KR (1) | KR102417575B1 (ko) |
| CN (1) | CN111479717B (ko) |
| BR (1) | BR112020011906A2 (ko) |
| MX (1) | MX2020006165A (ko) |
| RU (1) | RU2742313C1 (ko) |
| WO (1) | WO2019116577A1 (ko) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200132430A (ko) * | 2019-05-17 | 2020-11-25 | 현대자동차주식회사 | 전기 차량의 가속페달 안내 방법 및 시스템 |
| JP7314818B2 (ja) * | 2020-02-03 | 2023-07-26 | トヨタ自動車株式会社 | 車両 |
| EP4101676B1 (en) * | 2021-06-09 | 2024-08-28 | Volvo Car Corporation | Monitoring system for a vehicle |
| CA3194388A1 (en) | 2022-03-30 | 2023-09-30 | Taiga Motors Inc. | Power indicator for electric vehicle |
| US12461638B2 (en) | 2022-06-04 | 2025-11-04 | Apple Inc. | Customized user interfaces |
| KR20240008431A (ko) * | 2022-07-11 | 2024-01-19 | 현대자동차주식회사 | 하이브리드 차량의 시리즈 모드 구동 제어 방법 |
| US20260116187A1 (en) * | 2024-02-13 | 2026-04-30 | Apple Inc. | User interfaces for hybrid gauges |
| EP4631763A1 (en) * | 2024-04-11 | 2025-10-15 | Ford Global Technologies, LLC | System and method of controlling power of an electric vehicle |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009040197A (ja) * | 2007-08-08 | 2009-02-26 | Toyota Motor Corp | 車両運転支援装置及び方法 |
| JP2010149833A (ja) * | 2008-11-28 | 2010-07-08 | Equos Research Co Ltd | エコドライブ支援装置 |
| US20110125357A1 (en) * | 2008-07-31 | 2011-05-26 | Fujitsu Ten Limited | Fuel-saving driving diagnostic device, fuel-saving driving diagnostic system, control device of electric drive device, fuel-saving driving rating device, and fuel-saving driving diagnostic method |
| JP2013103574A (ja) * | 2011-11-11 | 2013-05-30 | Toyota Motor East Japan Inc | エコ運転支援装置 |
| JP2013107641A (ja) * | 2013-01-15 | 2013-06-06 | Fujitsu Ten Ltd | エコ運転支援装置及び方法 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1026541A (ja) * | 1996-07-10 | 1998-01-27 | Toyoda Gosei Co Ltd | 自動車用表示装置 |
| US5815072A (en) * | 1996-07-10 | 1998-09-29 | Toyoda Gosei Co., Ltd. | Vehicle display device |
| JP3266056B2 (ja) * | 1997-07-04 | 2002-03-18 | 日産自動車株式会社 | 電気自動車の制御装置 |
| JP2001119802A (ja) * | 1999-10-19 | 2001-04-27 | Yamaha Motor Co Ltd | 電動車両用表示装置 |
| JP4155321B2 (ja) * | 2006-09-25 | 2008-09-24 | トヨタ自動車株式会社 | ハイブリッド車両の表示装置、ハイブリッド車両、およびハイブリッド車両の表示方法 |
| JP2009008604A (ja) * | 2007-06-29 | 2009-01-15 | Yazaki Corp | 移動体用表示装置 |
| US7898405B2 (en) * | 2008-03-25 | 2011-03-01 | Ford Global Technologies, Llc | Vehicle information display and method |
| JP5012719B2 (ja) * | 2008-08-01 | 2012-08-29 | 株式会社デンソー | 車載装置 |
| JP2011251598A (ja) | 2010-06-01 | 2011-12-15 | Nissan Motor Co Ltd | 自動車の運転状態表示装置 |
| WO2012153395A1 (ja) * | 2011-05-10 | 2012-11-15 | トヨタ自動車株式会社 | 車両用表示装置 |
| JP5817429B2 (ja) * | 2011-10-21 | 2015-11-18 | トヨタ自動車株式会社 | 車両用制御装置 |
| KR101316017B1 (ko) * | 2011-11-14 | 2013-10-10 | 현대자동차주식회사 | 차량의 에코 운전 안내 방법 및 장치 |
| JP6069850B2 (ja) | 2012-02-29 | 2017-02-01 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP5949052B2 (ja) * | 2012-03-29 | 2016-07-06 | 日産自動車株式会社 | 車両用表示装置 |
| CN104176061B (zh) * | 2013-05-23 | 2016-12-28 | 大陆汽车投资(上海)有限公司 | 驾驶辅助系统 |
| KR101500376B1 (ko) * | 2013-09-26 | 2015-03-18 | 현대자동차 주식회사 | 친환경 자동차의 회생 제동 효율 표시 방법 및 시스템 |
| JP5913248B2 (ja) * | 2013-10-10 | 2016-04-27 | 富士重工業株式会社 | 車載用表示装置 |
| RU2673227C2 (ru) | 2014-09-09 | 2018-11-22 | Ниссан Мотор Ко., Лтд. | Устройство управления гибридного транспортного средства |
| US20170213137A1 (en) * | 2016-01-25 | 2017-07-27 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for predicting current and potential ranges of vehicles based on learned driver behavior |
| KR102309412B1 (ko) * | 2017-04-19 | 2021-10-06 | 엘지전자 주식회사 | 차량에 구비된 차량 제어 장치 및 차량의 제어방법 |
| KR102387613B1 (ko) * | 2017-06-26 | 2022-04-15 | 엘지전자 주식회사 | 차량용 인터페이스 시스템 |
| KR102343952B1 (ko) * | 2017-06-30 | 2021-12-27 | 현대자동차주식회사 | 하이브리드 차량 및 그를 위한 주행 부하 대응 제어 방법 |
-
2017
- 2017-12-15 BR BR112020011906-7A patent/BR112020011906A2/pt not_active Application Discontinuation
- 2017-12-15 WO PCT/JP2017/045211 patent/WO2019116577A1/ja not_active Ceased
- 2017-12-15 JP JP2019558866A patent/JP6897795B2/ja active Active
- 2017-12-15 US US16/772,594 patent/US11505070B2/en active Active
- 2017-12-15 MX MX2020006165A patent/MX2020006165A/es unknown
- 2017-12-15 CN CN201780097718.9A patent/CN111479717B/zh active Active
- 2017-12-15 RU RU2020119582A patent/RU2742313C1/ru active
- 2017-12-15 EP EP17934752.1A patent/EP3725579B1/en active Active
- 2017-12-15 KR KR1020207019261A patent/KR102417575B1/ko not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009040197A (ja) * | 2007-08-08 | 2009-02-26 | Toyota Motor Corp | 車両運転支援装置及び方法 |
| US20110125357A1 (en) * | 2008-07-31 | 2011-05-26 | Fujitsu Ten Limited | Fuel-saving driving diagnostic device, fuel-saving driving diagnostic system, control device of electric drive device, fuel-saving driving rating device, and fuel-saving driving diagnostic method |
| JP2010149833A (ja) * | 2008-11-28 | 2010-07-08 | Equos Research Co Ltd | エコドライブ支援装置 |
| JP2013103574A (ja) * | 2011-11-11 | 2013-05-30 | Toyota Motor East Japan Inc | エコ運転支援装置 |
| JP2013107641A (ja) * | 2013-01-15 | 2013-06-06 | Fujitsu Ten Ltd | エコ運転支援装置及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102417575B1 (ko) | 2022-07-08 |
| BR112020011906A2 (pt) | 2020-11-24 |
| EP3725579A4 (en) | 2020-12-30 |
| WO2019116577A1 (ja) | 2019-06-20 |
| JPWO2019116577A1 (ja) | 2021-01-07 |
| CN111479717A (zh) | 2020-07-31 |
| RU2742313C1 (ru) | 2021-02-04 |
| US20200384859A1 (en) | 2020-12-10 |
| US11505070B2 (en) | 2022-11-22 |
| EP3725579A1 (en) | 2020-10-21 |
| MX2020006165A (es) | 2020-08-13 |
| JP6897795B2 (ja) | 2021-07-07 |
| EP3725579B1 (en) | 2021-08-18 |
| CN111479717B (zh) | 2023-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6897795B2 (ja) | 運転状態表示方法及び運転状態表示システム | |
| JP5316466B2 (ja) | 表示装置 | |
| US9855958B2 (en) | Vehicle that switches between displaying fuel efficiency on a display device and displaying electricity efficiency on the display device based on engine use history when a selected running mode is a charge depleting mode | |
| KR102356538B1 (ko) | 하이브리드 차량에 있어서의 표시 방법 및 표시 시스템 | |
| US8768554B2 (en) | Vehicle power source device | |
| CN103930296A (zh) | 再生制动反馈显示系统和方法 | |
| JP2009027772A (ja) | 電池の余力表示装置及び方法 | |
| US11535230B2 (en) | Fuel economy display control method and fuel economy display control system | |
| US11168786B2 (en) | Electrified vehicle and control method for electrified vehicle | |
| US20140379186A1 (en) | Electronic control device | |
| KR101755515B1 (ko) | 하이브리드 차량용 엔진 제어 장치 및 방법 | |
| KR20160133998A (ko) | 차량의 엔진 마찰 토크 학습 장치 및 방법 | |
| JP2014202732A (ja) | バッテリの充電量検出装置およびバッテリの充電量検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20250702 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| H13 | Ip right lapsed |
Free format text: ST27 STATUS EVENT CODE: N-4-6-H10-H13-OTH-PC1903 (AS PROVIDED BY THE NATIONAL OFFICE); TERMINATION CATEGORY : DEFAULT_OF_REGISTRATION_FEE Effective date: 20250702 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20250702 |