KR20200094817A - 이동 로봇 및 복수의 이동 로봇의 제어방법 - Google Patents
이동 로봇 및 복수의 이동 로봇의 제어방법 Download PDFInfo
- Publication number
- KR20200094817A KR20200094817A KR1020190006059A KR20190006059A KR20200094817A KR 20200094817 A KR20200094817 A KR 20200094817A KR 1020190006059 A KR1020190006059 A KR 1020190006059A KR 20190006059 A KR20190006059 A KR 20190006059A KR 20200094817 A KR20200094817 A KR 20200094817A
- Authority
- KR
- South Korea
- Prior art keywords
- mobile robot
- liquid
- cleaning
- area
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0084—Program-controlled manipulators comprising a plurality of manipulators
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
- B25J11/0085—Cleaning
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4072—Arrangement of castors or wheels
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2852—Elements for displacement of the vacuum cleaner or the accessories therefor, e.g. wheels, casters or nozzles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1674—Program controls characterised by safety, monitoring, diagnostic
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/246—Arrangements for determining position or orientation using environment maps, e.g. simultaneous localisation and mapping [SLAM]
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/648—Performing a task within a working area or space, e.g. cleaning
- G05D1/6484—Performing a task within a working area or space, e.g. cleaning by taking into account parameters or characteristics of the working area or space, e.g. size or shape
- G05D1/6486—Performing a task within a working area or space, e.g. cleaning by taking into account parameters or characteristics of the working area or space, e.g. size or shape by taking into account surface condition, e.g. soiled
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/698—Control allocation
- G05D1/6985—Control allocation using a lead vehicle, e.g. primary-secondary arrangements
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/10—Specific applications of the controlled vehicles for cleaning, vacuuming or polishing
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/40—Indoor domestic environment
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
Description
도 2는 도 1에 도시된 로봇 청소기의 평면도이다.
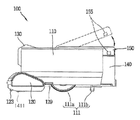
도 3은 도 1에 도시된 로봇 청소기의 측면도이다.
도 4는 본 발명의 일 실시예에 따른 로봇 청소기의 예시 구성요소를 나타내는 블록도이다.
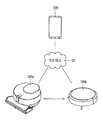
도 5a는 본 발명의 일 실시예에 따른 복수의 로봇 청소기 간의 네트워크 통신을 도시한 개념도이고, 도 5b는 도 5a의 네트워크 통신의 일 예를 도시한 개념도이다.
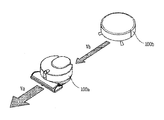
도 5c는 본 발명의 일 실시예에 따른 복수의 로봇 청소기 간의 추종 제어를 설명하기 위한 도면이다.
도 6은 본 발명의 일 실시예에 따른 복수의 로봇 청소기가 협업청소를 위한 방법을 설명하기 위한 대표 흐름도이다.
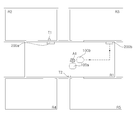
도 7은 본 발명의 일 실시예에 따른 복수의 로봇 청소기의 협업청소를 도시한 개념도이다.
도 8은 본 발명의 제1 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 9는 본 발명의 제2 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 10은 본 발명의 제3 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 11은 본 발명의 제4 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
Claims (20)
- 본체를 이동시키는 주행부;
청소영역에 대한 장애물 지도가 저장되는 메모리;
상기 청소영역에 대한 정보를 수집하는 센싱부;
제1 이동로봇과 통신하는 통신부; 및
상기 제1 이동로봇으로부터 상기 청소영역 내에 존재하는 액체 영역 위치정보를 포함하는 장애물 지도가 수신되면, 상기 본체를 상기 액체 영역으로 이동한 후, 적어도 상기 액체 영역을 청소하도록 제어하는 제어부를 포함하는 이동 로봇. - 제1항에 있어서,
상기 제어부는,
상기 장애물 지도에서 상기 액체 영역의 좌표 값을 바탕으로 상기 액체 영역을 특정하는 하는 이동 로봇. - 제1항에 있어서,
상기 액체 영역 위치정보는 상기 액체 영역 주변의 이미지를 포함하고,
상기 제어부는,
상기 센싱부에서 입력된 상기 본체 주변의 영상을 바탕으로 상기 액체 영역을 특정하는 이동 로봇. - 제1항에 있어서,
상기 제어부는,
상기 장애물 지도에서 상기 액체 영역의 좌표와 상기 통신부와 상기 제1 이동로봇 사이의 수신신호 강도(RSSI)를 바탕으로 상기 액체 영역을 특정하는 이동 로봇. - 제1항에 있어서,
상기 액체 영역 위치정보는 상기 액체 영역에서 라우터와 상기 제1 이동로봇 사이의 수신신호 강도 값을 포함하고,
상기 제어부는,
상기 장애물 지도에서 상기 액체 영역의 좌표와 상기 라우터와 상기 제1 이동로봇 사이의 수신신호 강도(RSSI) 값을 바탕으로 상기 액체 영역을 특정하는 이동 로봇. - 제1항에 있어서,
액체를 감지하는 액체 감지센서를 더 포함하고,
상기 제어부는,
상기 장애물 지도에서 상기 액체 영역의 좌표와 라우터와 상기 액체 감지센서에서 감지된 감지 값을 바탕으로 상기 액체 영역을 특정하는 이동 로봇. - 제1항에 있어서,
상기 제어부는,
상기 액체 영역의 청소를 완료 후에, 상기 본체가 상기 제1 이동로봇을 따라가며 청소하도록 상기 주행부를 제어하는 이동 로봇. - 제1항에 있어서,
상기 제어부는,
상기 액체 영역의 청소를 완료 후에, 상기 본체가 정 위치로 복귀하도록 상기 주행부를 제어하는 이동 로봇. - 제1 이동 로봇과 상기 제1 이동 로봇과 청소 방식이 상이한 제2 이동 로봇을 포함하는 복수의 이동 로봇의 제어방법에 있어서,
상기 제1 이동 로봇이 청소 영역 내에 존재하는 액체를 감지하는 단계;
상기 제1 이동 로봇이 액체를 감지하면, 상기 제2 이동 로봇으로 액체 영역 위치정보를 포함하는 장애물 지도와 상기 액체 영역 청소명령을 송신하는 단계;
상기 제2 이동 로봇이 상기 액체 영역 청소명령을 수신하면, 상기 제2 이동 로봇이 상기 액체 영역으로 이동하는 단계; 및
상기 제2 이동 로봇이 상기 액체 영역을 청소하는 단계를 포함하는 복수의 이동 로봇의 제어방법.
- 제9항에 있어서,
상기 제2 이동 로봇은 상기 장애물 지도에서 상기 액체 영역의 좌표 값, 상기 액체 영역 주변의 이미지, 상기 제1 이동 로봇과 상기 제2 이동 로봇 사이의 수신신호 강도 값 및 라우터와 상기 각 이동 로봇들 사이의 수신신호 강도 값 중 적어도 하나를 바탕으로 상기 액체 영역을 특정하는 복수의 이동 로봇의 제어방법. - 제9항에 있어서,
상기 제1 이동 로봇은,
상기 제2 이동 로봇이 상기 액체 영역으로 이동을 완료할 때 까지, 상기 액체 영역의 주변에서 대기하는 복수의 이동 로봇의 제어방법. - 제11항에 있어서,
상기 제1 이동 로봇은,
상기 제2 이동 로봇이 상기 액체 영역의 청소를 완료한 후에 상기 액체 영역에 액체가 존재하는 지 판단하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제12항에 있어서,
상기 제1 이동 로봇은,
상기 제2 이동 로봇이 상기 액체 영역의 청소를 완료한 후에 상기 액체 영역에 액체가 존재한다고 판단하는 경우, 상기 제2 이동 로봇에 상기 액체 영역의 재청소를 명령하는 신호를 송신하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제12항에 있어서,
상기 제1 이동 로봇은,
상기 제2 이동 로봇이 상기 액체 영역의 청소를 완료한 후에 상기 액체 영역에 액체가 존재하지 않는다고 판단하는 경우, 상기 청소 영역에 대한 청소를 수행하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제9항에 있어서,
상기 제2 이동 로봇은,
상기 액체 영역에 대한 청소를 완료한 후, 상기 제1 이동 로봇을 따라가며 청소하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제9항에 있어서,
상기 제2 이동 로봇은,
상기 액체 영역에 대한 청소를 완료한 후, 정 위치로 복귀하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제9항에 있어서,
상기 제1 이동 로봇은,
상기 제2 이동 로봇으로 상기 액체 영역 청소명령을 송신 한 후, 상기 액체 영역을 제외한 상기 청소 영역에 대한 청소를 수행하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제1 이동 로봇과 상기 제1 이동 로봇과 청소 방식이 상이한 제2 이동 로봇을 포함하는 복수의 이동 로봇의 제어방법에 있어서,
상기 제1 이동 로봇이 청소 영역 내에 존재하는 액체를 감지하는 단계;
상기 제1 이동 로봇이 액체 영역을 제외한 상기 청소 영역에 대한 청소를 완료하고 정 위치로 복귀하는 단계;
상기 제1 이동 로봇이 액체를 감지하면, 상기 제2 이동 로봇으로 액체 영역 위치정보를 포함하는 장애물 지도와 상기 액체 영역 청소명령을 송신하는 단계;
상기 제2 이동 로봇이 상기 액체 영역 청소명령을 수신하면, 상기 제2 이동 로봇이 상기 액체 영역으로 이동하는 단계; 및
상기 제2 이동 로봇이 상기 액체 영역을 청소하는 단계를 포함하는 복수의 이동 로봇의 제어방법. - 제18항에 있어서,
상기 제2 이동 로봇은,
상기 액체 영역에 대한 청소를 완료한 후, 정 위치로 복귀하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제1 이동 로봇과 상기 제1 이동 로봇과 청소 방식이 상이한 제2 이동 로봇을 포함하는 복수의 이동 로봇의 제어방법에 있어서,
상기 제1 이동 로봇이 청소 영역 내에 존재하는 액체를 감지하는 단계;
상기 제1 이동 로봇이 액체 영역을 제외한 상기 청소 영역에 대한 청소를 완료하고 상기 제2 이동 로봇 주변으로 이동하는 단계;
상기 제1 이동 로봇이 액체를 감지하면, 상기 제2 이동 로봇으로 추종명령을 송신하고, 상기 액체 영역으로 이동하는 단계;
상기 추종명령을 수신하면, 상기 제2 이동 로봇이 상기 제1 이동 로봇을 따라서 상기 액체 영역으로 이동하는 단계; 및
상기 제1 이동 로봇이 상기 액체 영역에 도착 한 후, 상기 제2 이동 로봇이 상기 제1 이동 로봇 주변 기설정된 영역을 청소하는 단계를 포함하는 복수의 이동 로봇의 제어방법.
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190006059A KR102234641B1 (ko) | 2019-01-17 | 2019-01-17 | 이동 로봇 및 복수의 이동 로봇의 제어방법 |
| TW109101805A TWI731555B (zh) | 2019-01-17 | 2020-01-17 | 移動式機器人及控制複數個移動式機器人的方法 |
| PCT/KR2020/000860 WO2020149696A1 (en) | 2019-01-17 | 2020-01-17 | Mobile robot and method of controlling plurality of mobile robots |
| CN202080022119.2A CN113631334B (zh) | 2019-01-17 | 2020-01-17 | 移动机器人和控制多个移动机器人的方法 |
| AU2020209330A AU2020209330B2 (en) | 2019-01-17 | 2020-01-17 | Mobile robot and method of controlling plurality of mobile robots |
| US16/745,950 US11787041B2 (en) | 2019-01-17 | 2020-01-17 | Mobile robot and method of controlling a plurality of mobile robots |
| EP20741912.8A EP3911480B1 (en) | 2019-01-17 | 2020-01-17 | Mobile robot and method of controlling plurality of mobile robots |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190006059A KR102234641B1 (ko) | 2019-01-17 | 2019-01-17 | 이동 로봇 및 복수의 이동 로봇의 제어방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200094817A true KR20200094817A (ko) | 2020-08-10 |
| KR102234641B1 KR102234641B1 (ko) | 2021-03-31 |
Family
ID=71609582
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190006059A Active KR102234641B1 (ko) | 2019-01-17 | 2019-01-17 | 이동 로봇 및 복수의 이동 로봇의 제어방법 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11787041B2 (ko) |
| EP (1) | EP3911480B1 (ko) |
| KR (1) | KR102234641B1 (ko) |
| CN (1) | CN113631334B (ko) |
| AU (1) | AU2020209330B2 (ko) |
| TW (1) | TWI731555B (ko) |
| WO (1) | WO2020149696A1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022075614A1 (ko) * | 2020-10-08 | 2022-04-14 | 엘지전자 주식회사 | 이동 로봇 시스템 |
| WO2023171877A1 (ko) * | 2022-03-11 | 2023-09-14 | 삼성전자 주식회사 | 로봇 및 그 제어 방법 |
| US12325137B2 (en) | 2022-03-11 | 2025-06-10 | Samsung Electronics Co., Ltd. | Robot and method for controlling the same |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102096564B1 (ko) * | 2018-06-25 | 2020-04-02 | 엘지전자 주식회사 | 복수의 자율주행 청소기 |
| CN114502292B (zh) * | 2019-07-15 | 2025-01-10 | 腾狮国际私人有限公司 | 一种协同清洁系统和装置 |
| JP7592740B2 (ja) * | 2020-03-25 | 2024-12-02 | ビー-ロボティクス カンパニー リミテッド | 注文システムと移動ロボットとの連動方法及びそのシステム |
| CN111612342B (zh) * | 2020-05-22 | 2024-03-15 | 格力博(江苏)股份有限公司 | 一种割草机队管理装置、管理方法以及管理系统 |
| CN111539399B (zh) * | 2020-07-13 | 2021-06-29 | 追创科技(苏州)有限公司 | 自移动设备的控制方法、装置、存储介质及自移动设备 |
| TWI801829B (zh) * | 2021-03-26 | 2023-05-11 | 大陸商信泰光學(深圳)有限公司 | 移動裝置及其移動方法 |
| SE546853C2 (en) * | 2021-08-12 | 2025-02-25 | Husqvarna Ab | Robotic working tool system and a method for providing cooperation of robotic working tools in the system |
| CN113910245A (zh) * | 2021-11-17 | 2022-01-11 | 珠海格力智能装备有限公司 | 基于大数据聚类的工业机器人控制方法 |
| CN114176460B (zh) * | 2021-11-19 | 2023-04-07 | 科大讯飞股份有限公司 | 清扫控制方法、相关装置、清扫方法、设备及清扫系统 |
| US12551075B2 (en) * | 2022-04-25 | 2026-02-17 | Samsung Electronics Co., Ltd. | Cleaning robot and controlling method thereof |
| EP4549104A4 (en) * | 2022-08-23 | 2025-10-01 | Samsung Electronics Co Ltd | ROBOT MOVING BY CONTROL OF TOF LIDAR SENSOR, AND CONTROL METHOD THEREOF |
| US12607703B2 (en) * | 2023-03-02 | 2026-04-21 | OnPoint Systems, LLC | Mobile entity management |
| CN116652948A (zh) * | 2023-05-31 | 2023-08-29 | 深圳银星智能集团股份有限公司 | 机器人的控制方法、非易失性可读存储介质及机器人 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120058945A (ko) * | 2010-11-30 | 2012-06-08 | 이커스텍(주) | 무선 네트워크기반 로봇 청소기 제어 장치 및 방법 |
| KR20140138555A (ko) | 2014-10-24 | 2014-12-04 | 김태윤 | 에코 마그네슘 합금 제조방법과 제조장치 |
| KR20170047790A (ko) * | 2015-10-23 | 2017-05-08 | 아주대학교산학협력단 | 액체 제거 로봇 청소기 |
| KR20170048815A (ko) * | 2015-10-27 | 2017-05-10 | 삼성전자주식회사 | 청소 로봇 및 그 제어방법 |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101247933B1 (ko) * | 2005-02-18 | 2013-03-26 | 아이로보트 코퍼레이션 | 습식 및 건식 청소를 위한 자동 표면 청소 로봇 |
| KR20080001001A (ko) * | 2006-06-28 | 2008-01-03 | 삼성전자주식회사 | 로봇 청소기 시스템 및 그 제어 방법 |
| US20090062974A1 (en) * | 2007-09-03 | 2009-03-05 | Junichi Tamamoto | Autonomous Mobile Robot System |
| KR101641237B1 (ko) * | 2009-11-20 | 2016-07-21 | 엘지전자 주식회사 | 로봇 청소기 및 이의 제어 방법 |
| KR20110119118A (ko) * | 2010-04-26 | 2011-11-02 | 엘지전자 주식회사 | 로봇 청소기, 및 이를 이용한 원격 감시 시스템 |
| US20130145572A1 (en) * | 2011-07-27 | 2013-06-13 | Irobot Corporation | Surface Cleaning Robot |
| KR101954144B1 (ko) * | 2012-06-08 | 2019-03-05 | 엘지전자 주식회사 | 로봇 청소기와, 이의 제어 방법, 및 이를 포함한 로봇 청소 시스템 |
| KR102122861B1 (ko) * | 2013-06-17 | 2020-06-29 | 삼성전자주식회사 | 로봇청소기 및 그 제어 방법 |
| JP5897517B2 (ja) * | 2013-08-21 | 2016-03-30 | シャープ株式会社 | 自律移動体 |
| CN104977929B (zh) * | 2014-04-09 | 2019-04-12 | 燕成祥 | 导引式清洁装置与导引式清洁组 |
| DE102014105460A1 (de) | 2014-04-16 | 2015-10-22 | Vorwerk & Co. Interholding Gmbh | Selbstfahrendes Bodenreinigungsgerät mit einem einem Führungsfahrzeug folgenden Folgewerkzeug |
| KR102293615B1 (ko) * | 2014-07-02 | 2021-08-26 | 삼성전자주식회사 | 청소 로봇 및 그 제어 방법 |
| KR101575597B1 (ko) * | 2014-07-30 | 2015-12-08 | 엘지전자 주식회사 | 로봇 청소 시스템 및 로봇 청소기의 제어방법 |
| CN104605794A (zh) | 2014-09-23 | 2015-05-13 | 东莞市万锦电子科技有限公司 | 地面清洁机器人系统 |
| EP3199083B1 (en) * | 2014-09-24 | 2021-09-08 | Samsung Electronics Co., Ltd. | Cleaning robot and method for controlling cleaning robot |
| KR20160058594A (ko) * | 2014-11-17 | 2016-05-25 | 삼성전자주식회사 | 로봇 청소기, 단말장치 및 그 제어 방법 |
| KR102328252B1 (ko) * | 2015-02-13 | 2021-11-19 | 삼성전자주식회사 | 청소 로봇 및 그 제어방법 |
| KR20160104429A (ko) * | 2015-02-26 | 2016-09-05 | 에브리봇 주식회사 | 로봇 청소기 및 그의 제어 방법 |
| WO2017036532A1 (en) * | 2015-09-03 | 2017-03-09 | Aktiebolaget Electrolux | System of robotic cleaning devices |
| US10335949B2 (en) * | 2016-01-20 | 2019-07-02 | Yujin Robot Co., Ltd. | System for operating mobile robot based on complex map information and operating method thereof |
| US9987752B2 (en) * | 2016-06-10 | 2018-06-05 | Brain Corporation | Systems and methods for automatic detection of spills |
| US10383498B2 (en) * | 2016-10-05 | 2019-08-20 | Lenovo (Singapore) Pte. Ltd. | Systems and methods to command a robotic cleaning device to move to a dirty region of an area |
| CN106527446B (zh) * | 2016-12-02 | 2020-11-13 | 北京小米移动软件有限公司 | 扫地机器人的控制方法及装置 |
| DE102016125319A1 (de) * | 2016-12-22 | 2018-06-28 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Betrieb eines sich selbsttätig fortbewegenden Fahrzeugs |
| JP6931994B2 (ja) * | 2016-12-22 | 2021-09-08 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 自律移動体、移動制御方法及び移動制御プログラム |
| KR102235270B1 (ko) * | 2017-01-18 | 2021-04-01 | 엘지전자 주식회사 | 이동 로봇 시스템 및 그 제어방법 |
| KR102235271B1 (ko) * | 2017-02-27 | 2021-04-01 | 엘지전자 주식회사 | 이동 로봇 및 그 제어방법 |
| KR102348041B1 (ko) * | 2017-03-28 | 2022-01-05 | 엘지전자 주식회사 | 복수의 이동 로봇을 포함하는 로봇 시스템의 제어 방법 |
| WO2018223259A1 (zh) * | 2017-06-05 | 2018-12-13 | 深圳市海和高新技术有限公司 | 自动升降式扫地机器人 |
| AU2018203588B2 (en) * | 2017-06-05 | 2019-11-14 | Bissell Inc. | Autonomous floor cleaning system |
| KR102021834B1 (ko) * | 2017-07-12 | 2019-09-17 | 엘지전자 주식회사 | 이동 로봇 시스템 및 그 제어방법 |
| CN108958232A (zh) * | 2017-12-07 | 2018-12-07 | 炬大科技有限公司 | 一种基于深度视觉的移动扫地机器人slam装置及算法 |
| KR20190073140A (ko) * | 2017-12-18 | 2019-06-26 | 엘지전자 주식회사 | 복수의 로봇 청소기 및 그 제어방법 |
| CN108247647B (zh) * | 2018-01-24 | 2021-06-22 | 速感科技(北京)有限公司 | 一种清洁机器人 |
| CN108888187A (zh) * | 2018-05-31 | 2018-11-27 | 四川斐讯信息技术有限公司 | 一种基于深度相机的扫地机器人 |
| US11185207B2 (en) * | 2018-07-24 | 2021-11-30 | Qualcomm Incorporated | Managing cleaning robot behavior |
-
2019
- 2019-01-17 KR KR1020190006059A patent/KR102234641B1/ko active Active
-
2020
- 2020-01-17 EP EP20741912.8A patent/EP3911480B1/en active Active
- 2020-01-17 TW TW109101805A patent/TWI731555B/zh active
- 2020-01-17 CN CN202080022119.2A patent/CN113631334B/zh active Active
- 2020-01-17 US US16/745,950 patent/US11787041B2/en active Active
- 2020-01-17 AU AU2020209330A patent/AU2020209330B2/en active Active
- 2020-01-17 WO PCT/KR2020/000860 patent/WO2020149696A1/en not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120058945A (ko) * | 2010-11-30 | 2012-06-08 | 이커스텍(주) | 무선 네트워크기반 로봇 청소기 제어 장치 및 방법 |
| KR20140138555A (ko) | 2014-10-24 | 2014-12-04 | 김태윤 | 에코 마그네슘 합금 제조방법과 제조장치 |
| KR20170047790A (ko) * | 2015-10-23 | 2017-05-08 | 아주대학교산학협력단 | 액체 제거 로봇 청소기 |
| KR20170048815A (ko) * | 2015-10-27 | 2017-05-10 | 삼성전자주식회사 | 청소 로봇 및 그 제어방법 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022075614A1 (ko) * | 2020-10-08 | 2022-04-14 | 엘지전자 주식회사 | 이동 로봇 시스템 |
| KR20220047000A (ko) * | 2020-10-08 | 2022-04-15 | 엘지전자 주식회사 | 이동 로봇 시스템 |
| WO2023171877A1 (ko) * | 2022-03-11 | 2023-09-14 | 삼성전자 주식회사 | 로봇 및 그 제어 방법 |
| US12325137B2 (en) | 2022-03-11 | 2025-06-10 | Samsung Electronics Co., Ltd. | Robot and method for controlling the same |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3911480A4 (en) | 2022-11-16 |
| TWI731555B (zh) | 2021-06-21 |
| EP3911480B1 (en) | 2024-05-01 |
| AU2020209330A1 (en) | 2021-09-02 |
| US11787041B2 (en) | 2023-10-17 |
| CN113631334B (zh) | 2024-04-23 |
| WO2020149696A1 (en) | 2020-07-23 |
| AU2020209330B2 (en) | 2023-07-20 |
| US20200230806A1 (en) | 2020-07-23 |
| EP3911480A1 (en) | 2021-11-24 |
| KR102234641B1 (ko) | 2021-03-31 |
| TW202032304A (zh) | 2020-09-01 |
| CN113631334A (zh) | 2021-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102234641B1 (ko) | 이동 로봇 및 복수의 이동 로봇의 제어방법 | |
| KR102470532B1 (ko) | 복수의 자율주행 이동 로봇 | |
| KR102015498B1 (ko) | 복수의 자율주행 청소기 및 그 제어방법 | |
| KR102198187B1 (ko) | 이동 로봇 | |
| KR102234642B1 (ko) | 이동 로봇 및 이동 로봇의 제어방법 | |
| KR102217540B1 (ko) | 이동 로봇 및 복수의 이동 로봇의 제어방법 | |
| KR102309898B1 (ko) | 도킹기기 및 이동 로봇 시스템 | |
| KR102309303B1 (ko) | 로봇 청소기 및 그 제어 방법 | |
| KR20200103203A (ko) | 복수의 자율주행 이동 로봇 | |
| KR20210108771A (ko) | 이동 로봇 및 복수의 이동 로봇의 제어방법 | |
| KR102535719B1 (ko) | 이동 로봇 및 이동 로봇의 제어방법 | |
| KR102210360B1 (ko) | 이동 로봇 및 이동 로봇의 제어방법 | |
| KR102390040B1 (ko) | 로봇 청소기 및 그 제어 방법 | |
| US12161275B2 (en) | Plurality of autonomous cleaner and controlling method for the same | |
| KR102179057B1 (ko) | 복수의 자율주행 청소기 | |
| KR102081340B1 (ko) | 복수의 로봇 청소기 및 그 제어방법 | |
| KR20200133544A (ko) | 이동 로봇 및 그 제어방법 | |
| KR20250034737A (ko) | 청소기 및 청소기의 제어방법 | |
| KR20250114977A (ko) | 이동 로봇 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20190117 |
|
| PA0201 | Request for examination | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200417 Patent event code: PE09021S01D |
|
| AMND | Amendment | ||
| PG1501 | Laying open of application | ||
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20201019 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20200417 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| X091 | Application refused [patent] | ||
| AMND | Amendment | ||
| PX0901 | Re-examination |
Patent event code: PX09011S01I Patent event date: 20201019 Comment text: Decision to Refuse Application Patent event code: PX09012R01I Patent event date: 20200617 Comment text: Amendment to Specification, etc. |
|
| PX0701 | Decision of registration after re-examination |
Patent event date: 20210105 Comment text: Decision to Grant Registration Patent event code: PX07013S01D Patent event date: 20201207 Comment text: Amendment to Specification, etc. Patent event code: PX07012R01I Patent event date: 20201019 Comment text: Decision to Refuse Application Patent event code: PX07011S01I Patent event date: 20200617 Comment text: Amendment to Specification, etc. Patent event code: PX07012R01I |
|
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20210326 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20210326 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20240207 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20250210 Start annual number: 5 End annual number: 5 |