KR20200095360A - 주행 중에 운전자로부터 추가적인 지시없이, 대상 차량이 군집 주행할 수 있도록 주행 모드를 변경하는 방법 및 장치 - Google Patents
주행 중에 운전자로부터 추가적인 지시없이, 대상 차량이 군집 주행할 수 있도록 주행 모드를 변경하는 방법 및 장치 Download PDFInfo
- Publication number
- KR20200095360A KR20200095360A KR1020200001726A KR20200001726A KR20200095360A KR 20200095360 A KR20200095360 A KR 20200095360A KR 1020200001726 A KR1020200001726 A KR 1020200001726A KR 20200001726 A KR20200001726 A KR 20200001726A KR 20200095360 A KR20200095360 A KR 20200095360A
- Authority
- KR
- South Korea
- Prior art keywords
- cluster driving
- driving
- target
- cluster
- score
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
- B60W30/165—Automatically following the path of a preceding lead vehicle, e.g. "electronic tow-bar"
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0055—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots with safety arrangements
- G05D1/0061—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots with safety arrangements for transition from automatic pilot to manual pilot and vice versa
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
- G05D1/0295—Fleet control by at least one leading vehicle of the fleet
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
- G05D1/0297—Fleet control by controlling means in a control room
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/22—Platooning, i.e. convoy of communicating vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0002—Automatic control, details of type of controller or control system architecture
- B60W2050/0004—In digital systems, e.g. discrete-time systems involving sampling
- B60W2050/0005—Processor details or data handling, e.g. memory registers or chip architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0019—Control system elements or transfer functions
- B60W2050/0022—Gains, weighting coefficients or weighting functions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/007—Switching between manual and automatic parameter input, and vice versa
- B60W2050/0073—Driver overrides controller
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0075—Automatic parameter input, automatic initialising or calibrating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/20—Data confidence level
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/55—External transmission of data to or from the vehicle using telemetry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/65—Data transmitted between vehicles
-
- G05D2201/0213—
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Remote Sensing (AREA)
- Human Computer Interaction (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Train Traffic Observation, Control, And Security (AREA)
Abstract
Description
도 1은 본 발명의 일 실시예에 따라 주행 중에 운전자로부터 추가적인 지시없이, 대상 차량 주변에 위치한 군집 주행 그룹에 대한 군집 주행 정보를 이용하여 상기 대상 차량이 군집 주행할 수 있도록 주행 모드를 변경하는 방법을 수행하는 기지국 서버의 구성을 나타낸 도면이다.
도 2는 본 발명의 일 실시예에 따라 주행 중에 운전자로부터 추가적인 지시없이, 대상 차량 주변에 위치한 군집 주행 그룹에 대한 군집 주행 정보를 이용하여 상기 대상 차량이 군집 주행할 수 있도록 주행 모드를 변경하는 방법을 나타낸 흐름도이다.
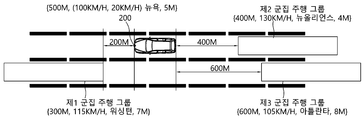
도 3은 본 발명의 일 실시예에 따라 주행 중에 운전자로부터 추가적인 지시없이, 대상 차량 주변에 위치한 군집 주행 그룹에 대한 군집 주행 정보를 이용하여 상기 대상 차량이 군집 주행할 수 있도록 주행 모드를 변경하는 방법을 수행하기 위해 사용되는 제K 군집 주행 적합도 점수를 계산하는 일 예시를 나타낸 도면이다.
도 4는 본 발명의 일 실시예에 따라 주행 중에 운전자로부터 추가적인 지시없이, 대상 차량 주변에 위치한 군집 주행 그룹에 대한 군집 주행 정보를 이용하여 상기 대상 차량이 군집 주행할 수 있도록 주행 모드를 변경하는 방법을 수행할 때 사용되는 포메이션 효율성 점수를 계산하는 일 예시를 나타낸 도면이다.
Claims (26)
- 주행 중에 운전자로부터 추가적인 지시없이, 대상 차량 주변에 위치한 군집(platoon) 주행 그룹에 대한 군집 주행 정보를 이용하여 상기 대상 차량이 군집 주행할 수 있도록 주행 모드를 변경하는 방법에 있어서,
(a) 어떤 군집 주행 그룹에도 포함되지 않은 상태에 대응하는 제1 모드로 주행 중인 대상 차량과 연동하여 동작하는 기지국 서버가, 상기 대상 차량으로부터 군집 주행 요청을 획득하면, 실시간 군집 주행 정보 DB를 참조로 하여, 하나 이상의 제1 군집 주행 차량을 포함하는 제1 군집 주행 그룹에 대응하는 제1 군집 주행 정보 내지 하나 이상의 제N 군집 주행 차량을 포함하는 제N 군집 주행 그룹에 대응하는 제N 군집 주행 정보를 획득하는 단계;
(b) 상기 기지국 서버가, (i) 상기 제1 군집 주행 정보에 포함된 하나 이상의 제1 군집 주행 파라미터들 내지 상기 제N 군집 주행 정보에 포함된 하나 이상의 제N 군집 주행 파라미터들을 참조로 하여, 상기 제1 군집 주행 그룹에 대응하는 제1 군집 주행 적합도 점수 내지 상기 제N 군집 주행 그룹에 대응하는 제N 군집 주행 적합도 점수를 계산하고, (ii) 상기 제1 군집 주행 그룹 내지 제N 군집 주행 그룹 중에서 상기 대상 차량을 포함할 타겟 군집 주행 그룹을 선택하는 단계; 및
(c) 상기 기지국 서버가, 상기 대상 차량으로 하여금, 상기 대상 차량이 상기 타겟 군집 주행 그룹에서 군집 주행하는 상태에 대응하는 제2 모드로 주행하도록 하는 단계;
를 포함하는 것을 특징으로 하는 방법. - 제 1항에 있어서,
상기 (b) 단계는,
상기 기지국 서버가, (i) 제K 군집 주행 파라미터에 포함된, 적어도 하나의 제K 군집 주행 거리 파라미터, 적어도 하나의 제K 군집 주행 속도 파라미터, 적어도 하나의 제K 군집 주행 목적지 파라미터 및 적어도 하나의 제K 군집 주행 차량 간격 파라미터를 참조하고, (ii) 기설정된, 적어도 하나의 설정 거리 파라미터, 적어도 하나의 설정 속도 파라미터, 적어도 하나의 설정 목적지 파라미터 및 적어도 하나의 설정 차량 간격 파라미터를 추가적으로 참조하여, K 군집 주행 그룹에 대한 제K 군집 주행 적합도 점수를 계산하는 것을 특징으로 하는 방법. - 제 2항에 있어서,
상기 (b) 단계는,
상기 기지국 서버가, (i) 상기 설정 거리 파라미터의 상기 제K 군집 주행 거리 파라미터에 대한 비율을 참조로 하여, 제K 거리 점수를 생성하고, (ii) (r1) 안전 속도 차이 파라미터의 (r2) 계획 속도 파라미터 및 상기 제K 군집 주행 속도 파라미터 간의 차이 파라미터에 대한 비율을 참조로 하여 제K 속도 점수를 생성하되, 상기 안전 속도 차이 파라미터는 상기 설정 속도 파라미터의 어느 일부이고, 상기 계획 속도 파라미터는 상기 설정 속도 파라미터의 어느 일부인 것을 특징으로 하며, (iii) (r1) 상기 설정 목적지 파라미터 및 상기 제K 군집 주행 목적지 파라미터를 참조로 하여 생성된, 공통 목적지 파라미터에 대응하는 거리 값의 (r2) 상기 설정 목적지 파라미터에 대응하는 거리 값에 대한 비율을 참조로 하여 제K 목적지 점수를 생성하고, (iv) 상기 제K 군집 주행 차량 간격 파라미터의 상기 설정 차량 간격 파라미터에 대한 비율을 참조로 하여 제K 차량 간격 점수를 생성한 후, 상기 제K 거리 점수, 상기 제K 속도 점수, 상기 제K 목적지 점수 및 상기 제K 차량 간격 점수를 참조로 하여, 상기 제K 군집 주행 적합도 점수를 생성하는 것을 특징으로 하는 방법. - 제 3항에 있어서,
상기 (b) 단계는,
상기 기지국 서버가, 아래 공식을 참조로 하여, 상기 제K 군집 주행 적합도 점수를 생성하되,

상기 수식에서,는 상기 제K 군집 주행 적합도 점수를 나타내고, 는 상기 제K 거리 점수를 나타내며,
는 상기 제K 거리 점수를 나타내며, 는 상기 제K 속도 점수를 나타내고,
는 상기 제K 속도 점수를 나타내고, 는 상기 제K 목적지 점수를 나타내며,
는 상기 제K 목적지 점수를 나타내며, 는 상기 제K 차량 간격 점수를 나타내고,
는 상기 제K 차량 간격 점수를 나타내고, 및
및 각각은 상기 제K 거리 점수, 상기 제K 속도 점수 및 상기 제K 목적지 점수 각각에 대응하는 가중치 각각을 나타내는 것을 특징으로 하는 방법.
각각은 상기 제K 거리 점수, 상기 제K 속도 점수 및 상기 제K 목적지 점수 각각에 대응하는 가중치 각각을 나타내는 것을 특징으로 하는 방법.
- 제 1항에 있어서,
상기 (c) 단계는,
상기 기지국 서버가, 상기 군집 주행 요청에 포함된 주행 의도 정보가 제1 상태 또는 제2 상태에 대응하는지 여부에 대한 정보를 참조로 하여, 상기 대상 차량으로 하여금, 상기 제1 상태에 대응하는 리드(lead) 그룹 또는 상기 제2 상태에 대응하는 팔로우 그룹 중 하나에서 군집 주행을 수행하도록 하되, 상기 리드 그룹 및 상기 팔로우 그룹은 상기 타겟 군집 주행 그룹의 종속 그룹인 것을 특징으로 하는 방법. - 제 5항에 있어서,
상기 (c) 단계는,
상기 기지국 서버가, 상기 대상 차량이 상기 팔로우 그룹에 포함되는 경우, 상기 대상 차량으로 하여금, 상기 타겟 군집 주행 그룹의 타겟 리더 차량으로부터 획득된 지시 정보를 참조로 하여 자율 주행을 수행하는 제(2-1) 모드로 주행하도록 하는 것을 특징으로 하는 방법. - 제 5항에 있어서,
상기 (c) 단계는,
상기 기지국 서버가, 상기 대상 차량이 상기 리드 그룹에 포함되는 경우, (i) 상기 대상 차량으로 하여금, 상기 타겟 군집 주행 그룹의 타겟 리더 차량으로부터 획득된 지시 정보를 참조로 하여 자율 주행을 수행하는 제(2-1) 모드로 주행하도록 하고, (ii) 실시간으로 업데이트될 상기 타겟 군집 주행 정보의 리더 턴(turn) 정보에 응답하여, 상기 대상 차량으로 하여금, 상기 타겟 리더 차량으로서, 상기 대상 차량의 대상 운전자에 의해 수행되는 반(半)자율주행에 대응하는 제(2-2) 모드로 주행하도록 하되, 상기 타겟 군집 주행 그룹에 포함된 타겟 군집 주행 차량들에 상기 지시 정보를 발신하는 것을 특징으로 하는 방법. - 제 1항에 있어서,
상기 (c) 단계는,
(c1) 상기 기지국 서버가, 상기 군집 주행 요청 및 상기 타겟 군집 주행 그룹의 타겟 군집 주행 정보를 참조로 하여, 상기 대상 차량의 대상 차량 카테고리 정보 및 상기 타겟 군집 주행 그룹의 타겟 군집 주행 구성 정보를 획득하는 단계;
(c2) 상기 기지국 서버가, (i) 포메이션(formation) DB를 참조로 하여, 상기 대상 차량 카테고리 정보 및 상기 타겟 군집 주행 구성 정보에 대응하는 하나 이상의 후보 포메이션들에 대한 정보를 획득한 후, (ii) 상기 후보 포메이션들 각각에 대응하는 각각의 주행 안전성 점수, 각각의 주행 경제성 점수 및 각각의 포메이션 변환용이성(modifiability) 점수를 계산함으로써, 각각의 포메이션 효율성 점수를 계산하고, (iii) 상기 포메이션 효율성 점수를 참조로 하여, 상기 대상 차량을 포함하는 상기 타겟 군집 주행 그룹의 적어도 하나의 업데이트 포메이션을 결정하는 단계; 및
(c3) 상기 기지국 서버가, 상기 대상 차량으로 하여금, 상기 업데이트 포메이션에 대응하는 상기 타겟 군집 주행 그룹의 위치에서 상기 제2 모드로 주행하도록 하는 단계;
를 포함하는 것을 특징으로 하는 방법. - 제 8항에 있어서,
상기 (c2) 단계는,
상기 기지국 서버가, 상기 타겟 군집 주행의 포메이션이 현재 포메이션으로부터 상기 각각의 후보 포메이션으로 변환되는 동안, 상기 대상 차량 및 상기 타겟 군집 주행 차량에 의해 이동된 각각의 거리를 나타내는 예상 이동 거리를 각각 참조로 하여, 상기 포메이션 변환용이성 점수를 각각 계산하되, 상기 대상 차량의 위치 정보 및 상기 타겟 군집 주행 그룹의 상기 현재 포메이션에 대한 정보를 참조로 하여 상기 예상 이동 거리가 계산되는 것을 특징으로 하는 방법. - 제 8항에 있어서,
상기 (c2) 단계는,
상기 기지국 서버가, 상기 포메이션 DB를 참조로 하여, 상기 각각의 주행 안전성 점수 및 상기 각각의 주행 경제성 점수를 획득하는 것을 특징으로 하는 방법. - 제 8항에 있어서,
상기 (c2) 단계는,
상기 기지국 서버가,
상기 타겟 군집 주행 정보로부터 획득한 상기 타겟 군집 주행 그룹의 주행 지향점에 대한 주행 성향 정보를 참조로 하여, 상기 각각의 주행 안전성 점수, 상기 각각의 주행 경제성 점수 및 상기 각각의 포메이션 변환용이성 점수의 적어도 일부에 대한 각각의 가중치를 계산하고, 상기 가중치를 추가로 참조로 하여, 상기 포메이션 효율성 점수 각각을 계산하는 것을 특징으로 하는 방법. - 제 1항에 있어서,
(d) 상기 기지국 서버가, 상기 대상 차량에 대한 정보를 참조로 하여, 상기 실시간 군집 주행 정보 DB에 포함된 상기 타겟 군집 주행 그룹에 대한 타겟 군집 주행 정보를 업데이트하는 단계;
를 더 포함하는 것을 특징으로 하는 방법. - 제 1항에 있어서,
상기 (b) 단계는,
상기 기지국 서버가, 상기 제1 군집 주행 적합도 점수 내지 상기 제N 군집 적합도 점수 중 임계(threshold) 군집 주행 적합도 점수 이상인 군집 주행 적합도 점수가 존재하지 않으며, 주행 의도 정보가 제1 상태에 대응하는 경우, 상기 대상 차량을 포함하는 신규 군집 주행 그룹을 상기 타겟 군집 주행 그룹으로서 선택하고,
상기 (c) 단계는,
상기 기지국 서버가, 상기 대상 차량으로 하여금, 상기 타겟 군집 주행 그룹의 타겟 리더 차량으로서, 상기 대상 차량의 대상 운전자에 의한 반(半)자율주행에 대응하는 제(2-2)모드로 주행하고, 상기 대상 차량은 상기 타겟 군집 주행 그룹의 타겟 군집 주행 차량들에 지시 정보를 발신하는 것을 특징으로 하는 방법. - 주행 중에 운전자로부터 추가적인 지시없이, 대상 차량 주변에 위치한 군집(platoon) 주행 그룹에 대한 군집 주행 정보를 이용하여 상기 대상 차량이 군집 주행할 수 있도록 주행 모드를 변경하는, 어떤 군집 주행 그룹에도 포함되지 않은 상태에 대응하는 제1 모드로 주행 중인 대상 차량과 연동하여 동작하는 기지국 서버에 있어서,
인스트럭션들을 저장하는 적어도 하나의 메모리; 및
상기 인스트럭션들을 수행하도록 설정된 적어도 하나의 프로세서를 포함하되, 상기 프로세서는, (I) 상기 대상 차량으로부터 군집 주행 요청을 획득하면, 실시간 군집 주행 정보 DB를 참조로 하여, 하나 이상의 제1 군집 주행 차량을 포함하는 제1 군집 주행 그룹에 대응하는 제1 군집 주행 정보 내지 하나 이상의 제N 군집 주행 차량을 포함하는 제N 군집 주행 그룹에 대응하는 제N 군집 주행 정보를 획득하는 프로세스; (II) (i) 상기 제1 군집 주행 정보에 포함된 하나 이상의 제1 군집 주행 파라미터들 내지 상기 제N 군집 주행 정보에 포함된 하나 이상의 제N 군집 주행 파라미터들을 참조로 하여, 상기 제1 군집 주행 그룹에 대응하는 제1 군집 주행 적합도 점수 내지 상기 제N 군집 주행 그룹에 대응하는 제N 군집 주행 적합도 점수를 계산하고, (ii) 상기 제1 군집 주행 그룹 내지 제N 군집 주행 그룹 중에서 상기 대상 차량을 포함할 타겟 군집 주행 그룹을 선택하는 프로세스; 및 (III) 상기 대상 차량으로 하여금, 상기 대상 차량이 상기 타겟 군집 주행 그룹에서 군집 주행하는 상태에 대응하는 제2 모드로 주행하도록 하는 프로세스;
를 수행하는 것을 특징으로 하는 기지국 서버. - 제 14항에 있어서,
상기 (II) 프로세스는,
상기 프로세서가, (i) 제K 군집 주행 파라미터에 포함된, 적어도 하나의 제K 군집 주행 거리 파라미터, 적어도 하나의 제K 군집 주행 속도 파라미터, 적어도 하나의 제K 군집 주행 목적지 파라미터 및 적어도 하나의 제K 군집 주행 차량 간격 파라미터를 참조하고, (ii) 기설정된, 적어도 하나의 설정 거리 파라미터, 적어도 하나의 설정 속도 파라미터, 적어도 하나의 설정 목적지 파라미터 및 적어도 하나의 설정 차량 간격 파라미터를 추가적으로 참조하여, K 군집 주행 그룹에 대한 제K 군집 주행 적합도 점수를 계산하는 것을 특징으로 하는 기지국 서버. - 제 15항에 있어서,
상기 (II) 프로세스는,
상기 프로세서가, (i) 상기 설정 거리 파라미터의 상기 제K 군집 주행 거리 파라미터에 대한 비율을 참조로 하여, 제K 거리 점수를 생성하고, (ii) (r1) 안전 속도 차이 파라미터의 (r2) 계획 속도 파라미터 및 상기 제K 군집 주행 속도 파라미터 간의 차이 파라미터에 대한 비율을 참조로 하여 제K 속도 점수를 생성하되, 상기 안전 속도 차이 파라미터는 상기 설정 속도 파라미터의 어느 일부이고, 상기 계획 속도 파라미터는 상기 설정 속도 파라미터의 어느 일부인 것을 특징으로 하며, (iii) (r1) 상기 설정 목적지 파라미터 및 상기 제K 군집 주행 목적지 파라미터를 참조로 하여 생성된, 공통 목적지 파라미터에 대응하는 거리 값의 (r2) 상기 설정 목적지 파라미터에 대응하는 거리 값에 대한 비율을 참조로 하여 제K 목적지 점수를 생성하고, (iv) 상기 제K 군집 주행 차량 간격 파라미터의 상기 설정 차량 간격 파라미터에 대한 비율을 참조로 하여 제K 차량 간격 점수를 생성한 후, 상기 제K 거리 점수, 상기 제K 속도 점수, 상기 제K 목적지 점수 및 상기 제K 차량 간격 점수를 참조로 하여, 상기 제K 군집 주행 적합도 점수를 생성하는 것을 특징으로 하는 기지국 서버. - 제 16항에 있어서,
상기 (II) 프로세스는,
상기 프로세서가, 아래 공식을 참조로 하여, 상기 제K 군집 주행 적합도 점수를 생성하되,

상기 수식에서,는 상기 제K 군집 주행 적합도 점수를 나타내고, 는 상기 제K 거리 점수를 나타내며,
는 상기 제K 거리 점수를 나타내며, 는 상기 제K 속도 점수를 나타내고,
는 상기 제K 속도 점수를 나타내고, 는 상기 제K 목적지 점수를 나타내며,
는 상기 제K 목적지 점수를 나타내며, 는 상기 제K 차량 간격 점수를 나타내고,
는 상기 제K 차량 간격 점수를 나타내고, 및
및 각각은 상기 제K 거리 점수, 상기 제K 속도 점수 및 상기 제K 목적지 점수 각각에 대응하는 가중치 각각을 나타내는 것을 특징으로 하는 기지국 서버.
각각은 상기 제K 거리 점수, 상기 제K 속도 점수 및 상기 제K 목적지 점수 각각에 대응하는 가중치 각각을 나타내는 것을 특징으로 하는 기지국 서버.
- 제 14항에 있어서,
상기 (III) 프로세스는,
상기 프로세서가, 상기 군집 주행 요청에 포함된 주행 의도 정보가 제1 상태 또는 제2 상태에 대응하는지 여부에 대한 정보를 참조로 하여, 상기 대상 차량으로 하여금, 상기 제1 상태에 대응하는 리드(lead) 그룹 또는 상기 제2 상태에 대응하는 팔로우 그룹 중 하나에서 군집 주행을 수행하도록 하되, 상기 리드 그룹 및 상기 팔로우 그룹은 상기 타겟 군집 주행 그룹의 종속 그룹인 것을 특징으로 하는 기지국 서버. - 제 18항에 있어서,
상기 (III) 프로세스는,
상기 프로세서가, 상기 대상 차량이 상기 팔로우 그룹에 포함되는 경우, 상기 대상 차량으로 하여금, 상기 타겟 군집 주행 그룹의 타겟 리더 차량으로부터 획득된 지시 정보를 참조로 하여 자율 주행을 수행하는 제(2-1) 모드로 주행하도록 하는 것을 특징으로 하는 기지국 서버. - 제 18항에 있어서,
상기 (III) 프로세스는,
상기 프로세서가, 상기 대상 차량이 상기 리드 그룹에 포함되는 경우, (i) 상기 대상 차량으로 하여금, 상기 타겟 군집 주행 그룹의 타겟 리더 차량으로부터 획득된 지시 정보를 참조로 하여 자율 주행을 수행하는 제(2-1) 모드로 주행하도록 하고, (ii) 실시간으로 업데이트될 상기 타겟 군집 주행 정보의 리더 턴(turn) 정보에 응답하여, 상기 대상 차량으로 하여금, 상기 타겟 리더 차량으로서, 상기 대상 차량의 대상 운전자에 의해 수행되는 반(半)자율주행에 대응하는 제(2-2) 모드로 주행하도록 하되, 상기 타겟 군집 주행 그룹에 포함된 타겟 군집 주행 차량들에 상기 지시 정보를 발신하는 것을 특징으로 하는 기지국 서버. - 제 14항에 있어서,
상기 (III) 프로세스는,
(III1) 상기 군집 주행 요청 및 상기 타겟 군집 주행 그룹의 타겟 군집 주행 정보를 참조로 하여, 상기 대상 차량의 대상 차량 카테고리 정보 및 상기 타겟 군집 주행 그룹의 타겟 군집 주행 구성 정보를 획득하는 프로세스;
(III2) (i) 포메이션(formation) DB를 참조로 하여, 상기 대상 차량 카테고리 정보 및 상기 타겟 군집 주행 구성 정보에 대응하는 하나 이상의 후보 포메이션들에 대한 정보를 획득한 후, (ii) 상기 후보 포메이션들 각각에 대응하는 각각의 주행 안전성 점수, 각각의 주행 경제성 점수 및 각각의 포메이션 변환용이성(modifiability) 점수를 계산함으로써, 각각의 포메이션 효율성 점수를 계산하고, (iii) 상기 포메이션 효율성 점수를 참조로 하여, 상기 대상 차량을 포함하는 상기 타겟 군집 주행 그룹의 적어도 하나의 업데이트 포메이션을 결정하는 프로세스; 및
(III3) 상기 대상 차량으로 하여금, 상기 업데이트 포메이션에 대응하는 상기 타겟 군집 주행 그룹의 위치에서 상기 제2 모드로 주행하도록 하는 프로세스;
를 수행하는 것을 특징으로 하는 기지국 서버. - 제 21항에 있어서,
상기 (III2) 프로세스는,
상기 프로세서가, 상기 타겟 군집 주행의 포메이션이 현재 포메이션으로부터 상기 각각의 후보 포메이션으로 변환되는 동안, 상기 대상 차량 및 상기 타겟 군집 주행 차량에 의해 이동된 각각의 거리를 나타내는 예상 이동 거리를 각각 참조로 하여, 상기 포메이션 변환용이성 점수를 각각 계산하되, 상기 대상 차량의 위치 정보 및 상기 타겟 군집 주행 그룹의 상기 현재 포메이션에 대한 정보를 참조로 하여 상기 예상 이동 거리가 계산되는 것을 특징으로 하는 기지국 서버. - 제 21항에 있어서,
상기 (III2) 프로세스는,
상기 프로세서가, 상기 기지국 서버가, 상기 포메이션 DB를 참조로 하여, 상기 각각의 주행 안전성 점수 및 상기 각각의 주행 경제성 점수를 획득하는 것을 특징으로 하는 기지국 서버. - 제 21항에 있어서,
상기 (III2) 프로세스는,
상기 프로세서가, 상기 타겟 군집 주행 정보로부터 획득한 상기 타겟 군집 주행 그룹의 주행 지향점에 대한 주행 성향 정보를 참조로 하여, 상기 각각의 주행 안전성 점수, 상기 각각의 주행 경제성 점수 및 상기 각각의 포메이션 변환용이성 점수의 적어도 일부에 대한 각각의 가중치를 계산하고, 상기 가중치를 추가로 참조로 하여, 상기 포메이션 효율성 점수 각각을 계산하는 것을 특징으로 하는 기지국 서버. - 제 14항에 있어서,
상기 프로세서가,
(IV) 상기 대상 차량에 대한 정보를 참조로 하여, 상기 실시간 군집 주행 정보 DB에 포함된 상기 타겟 군집 주행 그룹에 대한 타겟 군집 주행 정보를 업데이트하는 프로세스;
를 더 수행하는 것을 특징으로 하는 기지국 서버. - 제 14항에 있어서,
상기 (II) 프로세스는,
상기 프로세서가, 상기 제1 군집 주행 적합도 점수 내지 상기 제N 군집 적합도 점수 중 임계(threshold) 군집 주행 적합도 점수 이상인 군집 주행 적합도 점수가 존재하지 않으며, 주행 의도 정보가 제1 상태에 대응하는 경우, 상기 대상 차량을 포함하는 신규 군집 주행 그룹을 상기 타겟 군집 주행 그룹으로서 선택하고,
상기 (III) 프로세스는,
상기 프로세서가, 상기 대상 차량으로 하여금, 상기 타겟 군집 주행 그룹의 타겟 리더 차량으로서, 상기 대상 차량의 대상 운전자에 의한 반(半)자율주행에 대응하는 제(2-2)모드로 주행하고, 상기 대상 차량은 상기 타겟 군집 주행 그룹의 타겟 군집 주행 차량들에 지시 정보를 발신하는 것을 특징으로 하는 기지국 서버.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201962799219P | 2019-01-31 | 2019-01-31 | |
| US62/799,219 | 2019-01-31 | ||
| US16/724,513 US10768638B2 (en) | 2019-01-31 | 2019-12-23 | Method and device for switching driving modes to support subject vehicle to perform platoon driving without additional instructions from driver during driving |
| US16/724,513 | 2019-12-23 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200095360A true KR20200095360A (ko) | 2020-08-10 |
| KR102321001B1 KR102321001B1 (ko) | 2021-11-03 |
Family
ID=69191930
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200001726A Active KR102321001B1 (ko) | 2019-01-31 | 2020-01-06 | 주행 중에 운전자로부터 추가적인 지시없이, 대상 차량이 군집 주행할 수 있도록 주행 모드를 변경하는 방법 및 장치 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10768638B2 (ko) |
| EP (1) | EP3690844B1 (ko) |
| JP (1) | JP6919924B2 (ko) |
| KR (1) | KR102321001B1 (ko) |
| CN (1) | CN111497862B (ko) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6989429B2 (ja) * | 2018-03-28 | 2022-01-05 | 株式会社東芝 | 隊列走行運用システムおよび隊列走行運用方法 |
| EP3671692A1 (en) * | 2018-12-19 | 2020-06-24 | Ningbo Geely Automobile Research & Development Co. Ltd. | Time for passage of a platoon of vehicles |
| AU2019100368B4 (en) * | 2019-01-25 | 2019-11-28 | Norman BOYLE | A driverless impact attenuating traffic management vehicle |
| JP7207438B2 (ja) * | 2019-02-04 | 2023-01-18 | 日本電気株式会社 | 車両管理装置、車両管理方法、プログラム |
| KR102727116B1 (ko) * | 2019-03-20 | 2024-11-06 | 현대자동차주식회사 | 내비게이션 시스템 및 그의 경로 탐색 방법 |
| US12235114B2 (en) * | 2020-02-28 | 2025-02-25 | Mitsubishi Electric Corporation | Server for management, routine-run-vehicle control device, and following-vehicle control device |
| US11443636B2 (en) * | 2020-05-06 | 2022-09-13 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods of platoon leadership as a service |
| CN112000108B (zh) * | 2020-09-08 | 2021-09-21 | 北京航空航天大学 | 一种多智能体集群分组时变编队跟踪控制方法及系统 |
| US11501646B2 (en) * | 2020-10-06 | 2022-11-15 | Qualcomm Incorporated | Coordinating vehicle platooning using V2X assistance |
| US12321179B2 (en) * | 2021-01-29 | 2025-06-03 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and methods for platoon-leader-as-a-service |
| JP7468425B2 (ja) * | 2021-03-25 | 2024-04-16 | トヨタ自動車株式会社 | ライドシェアシステム及びライドシェア方法 |
| US11869361B2 (en) * | 2021-04-01 | 2024-01-09 | Gm Cruise Holdings Llc | Coordinated multi-vehicle routing |
| US11926322B2 (en) * | 2021-08-10 | 2024-03-12 | Toyota Motor Engineering & Manufacturing North America, Inc. | Hybrid deterministic override of probabilistic advanced driving assistance systems (ADAS) |
| KR102831105B1 (ko) * | 2022-02-17 | 2025-07-08 | 주식회사 에이치엘클레무브 | 차량 제어 시스템 및 그의 제어 방법 |
| CN115206081A (zh) * | 2022-07-07 | 2022-10-18 | 智道网联科技(北京)有限公司 | 自动驾驶车辆的编队控制系统 |
| CN115993818B (zh) * | 2022-11-09 | 2025-07-11 | 东南大学 | 一种信号交叉口智能网联车辆队列的协同行驶控制方法 |
| US12441367B1 (en) * | 2022-11-21 | 2025-10-14 | Amazon Technologies, Inc. | Dynamic vehicle control |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10261195A (ja) * | 1997-03-21 | 1998-09-29 | Fujitsu Ten Ltd | 車両群形成制御装置および方法 |
| JP2008003675A (ja) * | 2006-06-20 | 2008-01-10 | Toyota Motor Corp | 車載用隊列編成装置及び車両の隊列編成方法 |
| JP2010146428A (ja) * | 2008-12-22 | 2010-07-01 | Nec Corp | 追従対象車検索システム、追従対象車検索方法および追従対象車検索用プログラム |
| JP2017047814A (ja) * | 2015-09-03 | 2017-03-09 | 株式会社デンソー | 車両認識装置 |
| WO2018043753A1 (ja) * | 2016-09-05 | 2018-03-08 | ナブテスコオートモーティブ 株式会社 | 隊列走行管理システム |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4710976B2 (ja) * | 2006-08-07 | 2011-06-29 | トヨタ自動車株式会社 | 走行制御装置 |
| JP4992705B2 (ja) * | 2007-12-27 | 2012-08-08 | 株式会社エクォス・リサーチ | 隊列走行システム |
| US8676466B2 (en) * | 2009-04-06 | 2014-03-18 | GM Global Technology Operations LLC | Fail-safe speed profiles for cooperative autonomous vehicles |
| JP5408506B2 (ja) * | 2011-04-20 | 2014-02-05 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置 |
| JP5440579B2 (ja) * | 2011-09-27 | 2014-03-12 | 株式会社デンソー | 隊列走行装置 |
| JP6222531B2 (ja) * | 2013-11-08 | 2017-11-01 | 本田技研工業株式会社 | 隊列走行制御装置 |
| US9852554B2 (en) * | 2016-03-31 | 2017-12-26 | Harman International Industries, Incorporated | Systems and methods for vehicle-to-vehicle communication |
| US10353387B2 (en) | 2016-04-12 | 2019-07-16 | Here Global B.V. | Method, apparatus and computer program product for grouping vehicles into a platoon |
| EP3465371A4 (en) * | 2016-05-31 | 2019-12-18 | Peloton Technology Inc. | STATE MACHINE OF A COLUMN CONTROL UNIT |
| US9940840B1 (en) * | 2016-10-06 | 2018-04-10 | X Development Llc | Smart platooning of vehicles |
| US10503176B2 (en) * | 2016-12-30 | 2019-12-10 | Bendix Commercial Vehicle Systems Llc | Self-ordering of fleet vehicles in a platoon |
| US10268191B1 (en) * | 2017-07-07 | 2019-04-23 | Zoox, Inc. | Predictive teleoperator situational awareness |
| WO2019014372A1 (en) * | 2017-07-11 | 2019-01-17 | Peloton Technology, Inc. | METHODS, SYSTEMS AND DEVICES FOR FLEXIBLE COMMUNICATIONS, MONITORING AND CIRCULATION IN CONVEYANCE OF INTRA-FLEET VEHICLES, BETWEEN FLEETS AND AD HOC |
| US10788845B2 (en) | 2017-12-01 | 2020-09-29 | Cummins Inc. | Optimization of mission efficiency through platoon opportunity assessment |
-
2019
- 2019-12-23 US US16/724,513 patent/US10768638B2/en active Active
-
2020
- 2020-01-06 KR KR1020200001726A patent/KR102321001B1/ko active Active
- 2020-01-08 CN CN202010017315.2A patent/CN111497862B/zh active Active
- 2020-01-17 JP JP2020005648A patent/JP6919924B2/ja active Active
- 2020-01-24 EP EP20153534.1A patent/EP3690844B1/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10261195A (ja) * | 1997-03-21 | 1998-09-29 | Fujitsu Ten Ltd | 車両群形成制御装置および方法 |
| JP2008003675A (ja) * | 2006-06-20 | 2008-01-10 | Toyota Motor Corp | 車載用隊列編成装置及び車両の隊列編成方法 |
| JP2010146428A (ja) * | 2008-12-22 | 2010-07-01 | Nec Corp | 追従対象車検索システム、追従対象車検索方法および追従対象車検索用プログラム |
| JP2017047814A (ja) * | 2015-09-03 | 2017-03-09 | 株式会社デンソー | 車両認識装置 |
| WO2018043753A1 (ja) * | 2016-09-05 | 2018-03-08 | ナブテスコオートモーティブ 株式会社 | 隊列走行管理システム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3690844A1 (en) | 2020-08-05 |
| CN111497862A (zh) | 2020-08-07 |
| JP2020126620A (ja) | 2020-08-20 |
| US20200249699A1 (en) | 2020-08-06 |
| CN111497862B (zh) | 2023-06-02 |
| JP6919924B2 (ja) | 2021-08-18 |
| EP3690844C0 (en) | 2023-11-15 |
| US10768638B2 (en) | 2020-09-08 |
| KR102321001B1 (ko) | 2021-11-03 |
| EP3690844B1 (en) | 2023-11-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200095360A (ko) | 주행 중에 운전자로부터 추가적인 지시없이, 대상 차량이 군집 주행할 수 있도록 주행 모드를 변경하는 방법 및 장치 | |
| KR102328732B1 (ko) | 다양한 소스로부터 획득되는 정보의 퓨전을 통해 주변 객체의 모션을 예측함으로써, 사고 위험을 회피하여 안전한 자율 주행을 지원하는 학습 방법, 그리고 이를 이용한 학습 장치, 테스트 방법, 및 테스트 장치 | |
| EP3965004B1 (en) | Automatic lane changing method and device, and storage medium | |
| JP6913969B2 (ja) | 強化学習に基づいて協同走行で多重エージェントセンサフュージョンを遂行する方法及び装置 | |
| JP6916551B2 (ja) | V2x通信及びイメージ処理を利用した情報融合によって自律走行の短期経路をプランニングするための方法及び装置{method and device for short−term path planning of autonomous driving through information fusion by using v2x communication and image processing} | |
| US10802492B2 (en) | Vehicle path identification | |
| CN111696373B (zh) | 车队协同感知方法、车队协同控制方法和系统 | |
| US9505405B2 (en) | Rear collision avoidance and mitigation system | |
| AU2022202150A1 (en) | Software validation for autonomous vehicles | |
| CN103996312B (zh) | 具有社会行为交互的无人驾驶汽车控制系统 | |
| JP2020123341A (ja) | 自律走行モードと手動走行モードとの間の走行モードを変更するリモートコントロール自律走行自動車のための方法及び装置 | |
| US11433924B2 (en) | System and method for controlling one or more vehicles with one or more controlled vehicles | |
| DE112017000787T5 (de) | Verfahren zum Steuern der Bewegung eines Fahrzeugs und Fahrzeugsteuersystem | |
| DE102021132850A1 (de) | Homotopiebasierter planer für autonome fahrzeuge | |
| CN116740945B (zh) | 混行环境下快速路合流区多车协同编组交汇方法及系统 | |
| KR102893047B1 (ko) | 브레이크 중재 | |
| US10144428B2 (en) | Traffic light operation | |
| CN116629114A (zh) | 多智能体的模型训练方法、系统、计算机设备和存储介质 | |
| CN113114712A (zh) | 一种车辆数据处理方法及其装置 | |
| CN120472673A (zh) | 多车协同变道控制方法、装置、设备及介质 | |
| CN117690288B (zh) | 一种考虑公交站点的混合交通流仿真方法及系统 | |
| WO2023213200A1 (zh) | 一种会车方法及相关装置 | |
| JP7389456B2 (ja) | 交通渋滞予防、又は、予防及び緩和方法、制御装置及び制御車両 | |
| KR102941741B1 (ko) | 자율주행차량의 정차 위치를 결정하는 방법 및 이를 이용한 컴퓨팅 장치 | |
| CN116013062B (zh) | 一种港区无人驾驶重载移动平台智慧编队方法及系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| R15-X000 | Change to inventor requested |
St.27 status event code: A-3-3-R10-R15-oth-X000 |
|
| R16-X000 | Change to inventor recorded |
St.27 status event code: A-3-3-R10-R16-oth-X000 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 5 |