KR20200095703A - 차량용 레이더 센서장치 및 물체 감지방법과 그를 위한 안테나 장치 - Google Patents
차량용 레이더 센서장치 및 물체 감지방법과 그를 위한 안테나 장치 Download PDFInfo
- Publication number
- KR20200095703A KR20200095703A KR1020190013380A KR20190013380A KR20200095703A KR 20200095703 A KR20200095703 A KR 20200095703A KR 1020190013380 A KR1020190013380 A KR 1020190013380A KR 20190013380 A KR20190013380 A KR 20190013380A KR 20200095703 A KR20200095703 A KR 20200095703A
- Authority
- KR
- South Korea
- Prior art keywords
- transmission
- transmission antenna
- antenna
- phase
- ratio
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/35—Details of non-pulse systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/04—Systems determining presence of a target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/583—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets
- G01S13/584—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets adapted for simultaneous range and velocity measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/03—Details of HF subsystems specially adapted therefor, e.g. common to transmitter and receiver
- G01S7/032—Constructional details for solid-state radar subsystems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/12—Supports; Mounting means
- H01Q1/22—Supports; Mounting means by structural association with other equipment or articles
- H01Q1/24—Supports; Mounting means by structural association with other equipment or articles with receiving set
- H01Q1/241—Supports; Mounting means by structural association with other equipment or articles with receiving set used in mobile communications, e.g. GSM
- H01Q1/242—Supports; Mounting means by structural association with other equipment or articles with receiving set used in mobile communications, e.g. GSM specially adapted for hand-held use
- H01Q1/243—Supports; Mounting means by structural association with other equipment or articles with receiving set used in mobile communications, e.g. GSM specially adapted for hand-held use with built-in antennas
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q21/00—Antenna arrays or systems
- H01Q21/06—Arrays of individually energised antenna units similarly polarised and spaced apart
- H01Q21/061—Two dimensional planar arrays
- H01Q21/065—Patch antenna array
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
Description
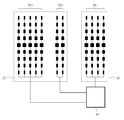
도 2는 일반적인 차량 레이더 센서 장치의 세부 구성도로서, 중장거리용 송신안테나와 근거리용 송신안테나가 포함된 예를 도시한다.
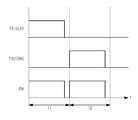
도 3은 도 2와 같은 일반적인 레이더 센서 장치에서의 신호 송신 및 수신 타이밍도를 도시한다.
도 4는 도 1과 같은 레이더 센서 장치에서, 중장거리용 송신 빔 패턴과 근거리용 송신 빔 패턴의 예를 도시한다.
도 5는 본 실시예에 의한 레이더 센서 장치의 전체적인 구성을 도시한다.
도 6은 본 실시예에 의한 레이더 센서 장치에 포함되는 안테나 장치 중 송신안테나부와 분배기를 확대한 도면이다.
도 7 및 도 8은 본 실시예에 의한 안테나 장치 중 분배기에 대한 확대도이다.
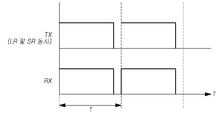
도 9는 본 실시예에 의한 레이더 센서 장치에서의 신호 송신 및 수신 타이밍도를 도시한다.
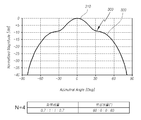
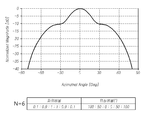
도 10 내지 도 14는 본 실시예에 의한 레이더 센서 장치에 의하여 생성되는 송신 빔 패턴의 여러 예를 도시하며, 각각 송신안테나의 개수(N), 분배기의 파워비율 및 위상비율에 따른 송신 빔 패턴의 형상을 예시한다.
도 15는 본 실시예에 의한 레이더 센서 장치를 위한 타겟 감지 방법의 흐름도이다.
120 : 수신안테나부 130 : 분배기
140 : 컨트롤러 142 : 신호 송수신부
144 : 신호 처리부 300 : 송신 빔 패턴
310 : 메인파트 320 : 사이드 파트
Claims (11)
- N(N은 4 이상의 짝수)개의 송신안테나를 포함하는 송신안테나부;
수신안테나부;
상기 송신안테나부의 N개 송신안테나로 신호를 공급하는 분배기;
상기 송신안테나부를 통하여 일정한 송신 빔 패턴을 가지는 송신신호를 송출하도록 제어하고, 상기 수신안테나에서 수신된 신호를 처리하여 타겟의 정보를 획득하는 컨트롤러;를 포함하며,
상기 분배기는 각 송신안테나에 공급되는 파워의 비율인 파워비율과 각 송신안테나에서 송출되는 신호의 위상비율인 위상비율을 기설정된 값으로 설정함으로써, 상기 송신 빔 패턴이 중/장거리 및 근거리의 타겟을 모두 감지할 수 있는 형태로 빔 성형하는 것을 특징으로 하는 차량용 레이더 센서 장치. - 제1항에 있어서,
상기 송신 빔 패턴은 장거리 타겟 감지를 위한 중앙 피크를 가지는 메인파트와, 근거리 타겟 감지를 위하여 상기 메인파트 양측에 널-포인트(Null-point) 없이 배치되는 사이드 파트를 포함하는 것을 특징으로 하는 차량용 레이더 센서 장치. - 제1항에 있어서,
상기 파워비율은 상기 N개의 송신안테나 중 중앙영역에 배치된 제1송신안테나의 파워가 상기 중앙영역 양측의 사이드 영역에 배치되는 제2송신안테나의 파워보다 크도록 설정되는 것을 특징으로 하는 차량용 레이더 센서 장치. - 제3항에 있어서,
상기 위상비율은 상기 N개의 송신안테나 중 중앙영역에 배치된 제1송신안테나를 통하여 송출되는 신호의 제1위상과, 상기 중앙영역 양측의 사이드 영역에 배치되는 제2송신안테나를 통하여 송출되는 신호의 제2위상을 정의하며, 상기 제1위상을 0도로 할 때, 상기 제2위상은 0도 내지 120도 중 하나의 위상값으로 설정되는 것을 특징으로 하는 차량용 레이더 센서 장치. - 제4항에 있어서,
상기 분배기는 상기 각 송신안테나까지 공급되는 출력측 급전라인의 선폭을 가변시켜 상기 파워비율을 설정하고, 각 송신안테나까지 공급되는 급전라인의 길이를 가변시켜 상기 위상비율을 설정하는 것을 특징으로 하는 차량용 레이더 센서 장치. - 차량용 레이더 센서 장치에 사용되는 안테나 장치로서,
상기 안테나장치는 N((N은 4 이상의 짝수))개의 송신안테나를 포함하는 송신안테나부;
수신안테나부;
상기 송신안테나부의 N개 송신안테나로 연결되는 급전라인을 포함하여, 상기 N개의 송신안테나로 신호를 공급하는 분배기;
를 포함하며, 상기 분배기는 각 송신안테나에 공급되는 신호의 파워의 비율인 파워비율과 각 송신안테나에서 송출되는 신호의 위상비율인 위상비율을 기설정된 값으로 설정되도록, 상기 각 송신안테나로 연결되는 상기 급전라인의 선폭 및 길이가 설정되는 것을 특징으로 하는 안테나 장치. - 제6항에 있어서,
상기 송신안테나부 및 분배기에 의하여 송출되는 송신 빔 패턴은 장거리 타겟 감지를 위한 중앙 피크를 가지는 메인파트와, 근거리 타겟 감지를 위하여 상기 메인파트 양측에 배치되는 사이드 파트를 포함하는 것을 특징으로 하는 안테나 장치. - 제6항에 있어서,
상기 파워비율은 상기 N개의 송신안테나 중 중앙영역에 배치된 제1송신안테나의 파워가 상기 중앙영역 양측의 사이드 영역에 배치되는 제2송신안테나의 파워보다 크도록 설정되는 것을 특징으로 하는 안테나 장치. - 제8항에 있어서,
상기 위상비율은 상기 N개의 송신안테나 중 중앙영역에 배치된 제1송신안테나를 통하여 송출되는 신호의 제1위상과, 상기 중앙영역 양측의 사이드 영역에 배치되는 제2송신안테나를 통하여 송출되는 신호의 제2위상을 정의하며, 상기 제1위상을 0도로 할 때, 상기 제2위상은 0도 내지 120도 중 하나의 위상값으로 설정되는 것을 특징으로 하는 안테나 장치. - 제6항에 있어서,
상기 급전라인의 출력측 급전라인의 선폭에 따라 상기 파워비율이 결정되고, 상기 급전라인의 길이에 따라 상기 위상비율이 결정되는 것을 특징으로 하는 안테나 장치. - N((N은 4 이상의 짝수)개의 송신안테나를 포함하는 송신안테나부와, 수신안테나부와, 상기 송신안테나부의 N개 송신안테나로 신호를 공급하는 분배기와, 컨트롤러를 포함하는 차량용 레이더 센서 장치를 이용한 감지 방법으로서,
상기 송신안테나부 및 분배기를 이용하여, 각 송신안테나에 공급되는 파워의 비율인 파워비율과 각 송신안테나에서 송출되는 신호의 위상비율인 위상비율을 기설정된 값으로 설정함으로써, 중/장거리 타겟 및 근거리 타겟을 모두 감지할 수 있는 형태의 송신 빔 패턴으로 신호를 송출하는 단계;
상기 수신안테냐부를 이용하여, 상기 중/장거리 타겟 및 근거리 타겟 중 하나 이상에서 반사된 수신신호를 수신하는 단계;
상기 컨트롤러를 이용하여, 수신된 상기 수신신호를 처리하여 상기 중/장거리 타겟 및 근거리 타겟 중 하나 이상의 정보를 획득하는 단계;
를 포함하는 물체 감지방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190013380A KR102746695B1 (ko) | 2019-02-01 | 2019-02-01 | 차량용 레이더 센서장치 및 물체 감지방법과 그를 위한 안테나 장치 |
| US16/779,485 US11422254B2 (en) | 2019-02-01 | 2020-01-31 | Radar sensor apparatus for vehicle, object detecting method, and antenna apparatus therefor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190013380A KR102746695B1 (ko) | 2019-02-01 | 2019-02-01 | 차량용 레이더 센서장치 및 물체 감지방법과 그를 위한 안테나 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200095703A true KR20200095703A (ko) | 2020-08-11 |
| KR102746695B1 KR102746695B1 (ko) | 2024-12-26 |
Family
ID=71836327
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190013380A Active KR102746695B1 (ko) | 2019-02-01 | 2019-02-01 | 차량용 레이더 센서장치 및 물체 감지방법과 그를 위한 안테나 장치 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11422254B2 (ko) |
| KR (1) | KR102746695B1 (ko) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102351551B1 (ko) * | 2021-03-12 | 2022-01-18 | (주)디지탈엣지 | 다기능 레이더 시스템 및 그의 신호 처리방법 |
| KR20220060177A (ko) * | 2020-11-04 | 2022-05-11 | (주)스마트레이더시스템 | 차량 내부 공간에 적응적인 수신 빔 분포를 형성하는 차량 내부용 레이더 장치 |
| KR20220068747A (ko) * | 2020-11-19 | 2022-05-26 | 주식회사 에이티코디 | 비대칭 광각 레이다 모듈 |
| KR20220118131A (ko) | 2021-02-18 | 2022-08-25 | 현대모비스 주식회사 | 타겟의 속도 감지 방법 및 감지 시스템 |
| KR20220125491A (ko) | 2021-03-05 | 2022-09-14 | 현대모비스 주식회사 | 타겟의 속도 감지 방법 및 감지 시스템 |
| US12189017B2 (en) | 2022-01-27 | 2025-01-07 | Smart Radar System, Inc. | In-cabin radar apparatus |
| US12241973B2 (en) | 2021-02-18 | 2025-03-04 | Hyundai Mobis Co., Ltd. | Method and system for detecting velocity of target |
| KR20250035723A (ko) | 2023-09-06 | 2025-03-13 | 주식회사 아모센스 | 차량용 레이더 안테나 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11262434B2 (en) * | 2019-04-01 | 2022-03-01 | GM Global Technology Operations LLC | Antenna array design and processing to eliminate false detections in a radar system |
| US11181614B2 (en) * | 2019-06-06 | 2021-11-23 | GM Global Technology Operations LLC | Antenna array tilt and processing to eliminate false detections in a radar system |
| US11460567B2 (en) * | 2020-05-29 | 2022-10-04 | Nxp B.V. | Radar apparatus and method |
| EP3929622B1 (en) * | 2020-06-25 | 2024-08-07 | NXP USA, Inc. | Radar system |
| FR3116127B1 (fr) * | 2020-11-12 | 2022-11-11 | Thales Sa | Système radar d'imagerie à entrées et sorties multiples de type MIMO. |
| CN112327284B (zh) * | 2020-11-12 | 2024-11-12 | 广州极飞科技股份有限公司 | 雷达控制方法、雷达装置和可移动设备 |
| EP4174516A1 (en) * | 2021-10-26 | 2023-05-03 | Veoneer Sweden AB | Radar transceiver calibration |
| US20230204748A1 (en) * | 2021-12-29 | 2023-06-29 | Nxp B.V. | Beam Shaping Array for Compact Dual-Range Automotive Radar |
| CN116609778A (zh) * | 2022-02-09 | 2023-08-18 | 智能雷达系统有限公司 | 舱内雷达装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6686867B1 (en) * | 1999-07-30 | 2004-02-03 | Volkswagen Ag | Radar sensor and radar antenna for monitoring the environment of a motor vehicle |
| US20170309997A1 (en) * | 2016-04-25 | 2017-10-26 | Uhnder, Inc. | Vehicle radar system using shaped antenna patterns |
| US20180267139A1 (en) * | 2015-09-24 | 2018-09-20 | Lg Innotek Co., Ltd. | Antenna device and vehicle radar device comprising same |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4085840B2 (ja) | 2002-03-01 | 2008-05-14 | 株式会社豊田中央研究所 | レーダ装置 |
| JP2008170193A (ja) * | 2007-01-09 | 2008-07-24 | Mitsubishi Electric Corp | レーダ装置 |
| JP2008275460A (ja) * | 2007-04-27 | 2008-11-13 | Mitsubishi Electric Corp | レーダ装置 |
| CN102893173B (zh) * | 2010-03-05 | 2014-12-03 | 温莎大学 | 雷达系统及其制作方法 |
| KR101223804B1 (ko) | 2011-01-25 | 2013-01-17 | 주식회사 만도 | 감지 센서 |
| KR101534225B1 (ko) | 2013-03-20 | 2015-07-06 | 주식회사 만도 | 레이더 장치 |
| CN107515399B (zh) * | 2016-06-17 | 2021-03-16 | 启碁科技股份有限公司 | 车用雷达系统 |
| US20190072659A1 (en) * | 2017-09-07 | 2019-03-07 | Richard Gu | Artificial-Intelligence Controlled Adaptive Multi-Purpose Beam Forming Automobile Radar |
-
2019
- 2019-02-01 KR KR1020190013380A patent/KR102746695B1/ko active Active
-
2020
- 2020-01-31 US US16/779,485 patent/US11422254B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6686867B1 (en) * | 1999-07-30 | 2004-02-03 | Volkswagen Ag | Radar sensor and radar antenna for monitoring the environment of a motor vehicle |
| US20180267139A1 (en) * | 2015-09-24 | 2018-09-20 | Lg Innotek Co., Ltd. | Antenna device and vehicle radar device comprising same |
| US20170309997A1 (en) * | 2016-04-25 | 2017-10-26 | Uhnder, Inc. | Vehicle radar system using shaped antenna patterns |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220060177A (ko) * | 2020-11-04 | 2022-05-11 | (주)스마트레이더시스템 | 차량 내부 공간에 적응적인 수신 빔 분포를 형성하는 차량 내부용 레이더 장치 |
| KR20220068747A (ko) * | 2020-11-19 | 2022-05-26 | 주식회사 에이티코디 | 비대칭 광각 레이다 모듈 |
| KR20220118131A (ko) | 2021-02-18 | 2022-08-25 | 현대모비스 주식회사 | 타겟의 속도 감지 방법 및 감지 시스템 |
| US12241973B2 (en) | 2021-02-18 | 2025-03-04 | Hyundai Mobis Co., Ltd. | Method and system for detecting velocity of target |
| KR20220125491A (ko) | 2021-03-05 | 2022-09-14 | 현대모비스 주식회사 | 타겟의 속도 감지 방법 및 감지 시스템 |
| KR102351551B1 (ko) * | 2021-03-12 | 2022-01-18 | (주)디지탈엣지 | 다기능 레이더 시스템 및 그의 신호 처리방법 |
| US12189017B2 (en) | 2022-01-27 | 2025-01-07 | Smart Radar System, Inc. | In-cabin radar apparatus |
| KR20250035723A (ko) | 2023-09-06 | 2025-03-13 | 주식회사 아모센스 | 차량용 레이더 안테나 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11422254B2 (en) | 2022-08-23 |
| KR102746695B1 (ko) | 2024-12-26 |
| US20200249344A1 (en) | 2020-08-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102746695B1 (ko) | 차량용 레이더 센서장치 및 물체 감지방법과 그를 위한 안테나 장치 | |
| CN110361738B (zh) | 雷达设备及其天线设备 | |
| US11874363B2 (en) | Radar apparatus and antenna apparatus therefor | |
| KR102735493B1 (ko) | 레이더 장치와 물체 감지 방법 및 그를 위한 신호 처리 장치 | |
| KR102667977B1 (ko) | 차량용 레이더 장치 및 제어방법 | |
| KR102662238B1 (ko) | 레이더 장치 및 그를 위한 안테나 장치 | |
| KR102653129B1 (ko) | 레이더 장치 및 그를 위한 안테나 장치 | |
| KR102662232B1 (ko) | 다중입력 다중출력 안테나부를 포함하는 레이더 장치 | |
| KR102859813B1 (ko) | 차량용 레이더의 수직 장착 오정렬 감지 장치, 방법 및 그를 포함하는 레이더 장치 | |
| KR102814886B1 (ko) | 레이더 장치, 레이더 장치용 안테나 장치 및 레이더 장치의 제어 방법 | |
| KR102651145B1 (ko) | 레이더 장치 및 그를 위한 안테나 장치 | |
| US20210278501A1 (en) | Method for determining at least one object information item of at least one target object which is sensed with a radar system, in particular of a vehicle, radar system and driver assistance system | |
| US11802960B2 (en) | Phase correcting apparatus and method of transmission signal of vehicle radar, and vehicle radar apparatus with the same | |
| KR102859817B1 (ko) | 차량용 레이더의 고장 판단 장치 및 방법과, 그를 포함하는 레이더 장치 | |
| KR20220089824A (ko) | 이동기기 장애물감지용 스마트센서장치 | |
| KR102689268B1 (ko) | 차량용 레이더 장치 및 제어방법 | |
| US12360238B2 (en) | Vehicle radar apparatus and method of controlling the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20190201 |
|
| PG1501 | Laying open of application | ||
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
Patent event date: 20210929 Comment text: Notification of Change of Applicant Patent event code: PN23011R01D |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20220125 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20190201 Comment text: Patent Application |
|
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
Patent event date: 20220411 Comment text: Notification of Change of Applicant Patent event code: PN23011R01D |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20240315 Patent event code: PE09021S01D |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20240412 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20241218 |
|
| PG1601 | Publication of registration |