KR20200097825A - 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 - Google Patents
인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 Download PDFInfo
- Publication number
- KR20200097825A KR20200097825A KR1020207023177A KR20207023177A KR20200097825A KR 20200097825 A KR20200097825 A KR 20200097825A KR 1020207023177 A KR1020207023177 A KR 1020207023177A KR 20207023177 A KR20207023177 A KR 20207023177A KR 20200097825 A KR20200097825 A KR 20200097825A
- Authority
- KR
- South Korea
- Prior art keywords
- intra prediction
- prediction mode
- divided
- unit
- block
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
- H04N19/159—Prediction type, e.g. intra-frame, inter-frame or bidirectional frame prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/107—Selection of coding mode or of prediction mode between spatial and temporal predictive coding, e.g. picture refresh
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/11—Selection of coding mode or of prediction mode among a plurality of spatial predictive coding modes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/119—Adaptive subdivision aspects, e.g. subdivision of a picture into rectangular or non-rectangular coding blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/124—Quantisation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/132—Sampling, masking or truncation of coding units, e.g. adaptive resampling, frame skipping, frame interpolation or high-frequency transform coefficient masking
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/70—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by syntax aspects related to video coding, e.g. related to compression standards
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/80—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation
- H04N19/82—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation involving filtering within a prediction loop
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/90—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using coding techniques not provided for in groups H04N19/10-H04N19/85, e.g. fractals
- H04N19/91—Entropy coding, e.g. variable length coding [VLC] or arithmetic coding
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
Description
도 1은 본 발명이 적용되는 실시예로서, 정지 영상 또는 동영상 신호의 인코딩이 수행되는 인코더의 개략적인 블록도를 나타낸다.
도 2는 본 발명이 적용되는 실시예로서, 정지 영상 또는 동영상 신호의 인코딩이 수행되는 디코더의 개략적인 블록도를 나타낸다.
도 3은 본 발명에 적용될 수 있는 코딩 유닛의 분할 구조를 설명하기 위한 도면이다.
도 4는 본 발명에 적용될 수 있는 예측 유닛을 설명하기 위한 도면이다.
도 5는 본 발명이 적용되는 실시예로서, 인트라 예측 방법을 예시하는 도면이다.
도 6은 인트라 예측 모드에 따른 예측 방향을 예시한다.
도 7 및 도 8은 기존의 인트라 모드 예측에서의 문제점을 설명하기 위한 도면이다.
도 9는 본 발명의 일 실시예에 따른 인트라 예측 모드 기반 분할 방법을 예시한다.
도 10은 본 발명의 일 실시예에 따른 인트라 예측 모드 기반 분할된 블록에 대한 참조 샘플의 구성 방법을 예시한다.
도 11은 기존의 블록 분할 방식과 본 발명에 따른 인트라 예측 모드 기반 블록 분할 방식을 비교하여 설명하기 위한 도면이다.
도 12는 본 발명의 일 실시예에 따른 인트라 예측부를 보다 구체적으로 예시하는 도면이다.
도 13 및 도 14는 본 발명의 일 실시예에 따른 인트라 예측 모드 기반 영상 신호 처리 방법을 예시하는 도면이다.
도 15는 본 발명의 일 실시예에 따른 변환 유닛을 재배치(또는 재구성) 방법을 설명하기 위한 도면이다.
도 16은 기존의 변환 블록 분할 방식과 본 발명에 따른 변환 블록 재구성 방법을 비교하여 설명하기 위한 도면이다.
도 17은 본 발명의 일 실시예에 따른 변환 유닛의 재배치(또는 재구성) 방법을 설명하기 위한 도면이다.
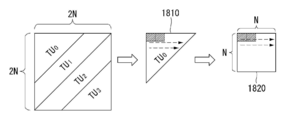
도 18은 본 발명의 일 실시예에 따른 변환 유닛의 재배치(또는 재구성) 방법을 설명하기 위한 도면이다.
도 19는 본 발명의 일 실시예에 따른 변환부/역변환부를 보다 구체적으로 예시하는 도면이다.
도 20은 본 발명의 일 실시예에 따른 인트라 예측 모드 기반 영상 신호 처리 방법을 예시하는 도면이다.

Claims (13)
- 인트라 예측(intra prediction) 모드 기반으로 영상 내 처리 블록을 복원하는 방법에 있어서,
상기 처리 블록의 분할 플래그(split flag)를 획득하는 단계;
상기 분할 플래그가 1이면, 상기 처리 블록을 복수의 변환 유닛으로 분할하는 단계;
상기 변환 유닛 각각에 대하여 인트라 예측 샘플 생성에 이용되는 참조 샘플(reference sample)을 구성하는 단계; 및
상기 처리 블록의 인트라 예측 모드에 기초하여, 상기 변환 유닛 각각에 대하여 상기 참조 샘플을 이용하여 인트라 예측을 수행하는 단계를 포함하되,
상기 변환 유닛 각각에 대하여 인트라 예측을 수행하는 단계는, 상기 인트라 예측 모드에 기초하여 상기 참조 샘플에 대하여 필터링을 수행하는 단계를 더 포함하고,
상기 처리 블록의 분할 방향은 수평 방향 또는 수직 방향 중 하나이며,
상기 참조 샘플의 개수는 상기 분할된 변환 유닛의 크기에 기반하여 결정되는 것을 특징으로 하는 영상 내 처리 블록 복원 방법. - 제1항에 있어서,
상기 처리 블록의 인트라 예측 모드를 기반으로 상기 처리 블록이 정방형의 쿼드-트리 방식으로 분할되는지 상기 인트라 예측 모드의 예측 방향에 수직하여 분할되는지 결정되는 영상 내 처리 블록 복원 방법. - 제2항에 있어서,
상기 처리 블록의 인트라 예측 모드가 인트라 플래너(intra planar) 또는 인트라 DC(intra DC)인 경우, 상기 처리 블록은 정방형의 쿼드-트리 방식으로 분할되고,
그렇지 않은 경우, 상기 처리 블록은 상기 인트라 예측 모드의 예측 방향에 수직하여 분할되는 영상 내 처리 블록 복원 방법. - 제1항에 있어서,
상기 변환 유닛을 정방형의 블록으로 재구성하는 단계; 및
상기 재구성된 변환 유닛을 대상으로 변환/역변환을 수행하는 단계를 더 포함하는 영상 내 처리 블록 복원 방법. - 제4항에 있어서,
상기 변환 유닛에 포함된 샘플이 미리 정해진 순서에 따라 재배치됨으로써 정방형의 블록이 재구성되는 영상 내 처리 블록 복원 방법. - 제1항에 있어서,
상기 참조 샘플은 상기 변환 유닛의 좌측(left) 경계에 인접한 샘플, 상기 변환 유닛의 상측(top) 경계에 인접한 샘플 및 상기 변환 유닛의 좌상측(top-left)에 이웃하는 샘플로 구성되는 영상 내 처리 블록 복원 방법. - 인트라 예측(intra prediction) 모드 기반으로 영상을 처리하는 방법에 있어서,
처리 블록의 분할 플래그(split flag)를 생성하는 단계;
상기 처리 블록을 복수의 변환 유닛으로 분할하는 단계;
상기 변환 유닛 각각에 대하여 인트라 예측 샘플 생성에 이용되는 참조 샘플(reference sample)을 구성하는 단계;
상기 처리 블록의 인트라 예측 모드에 기초하여, 상기 변환 유닛 각각에 대하여 상기 참조 샘플을 이용하여 인트라 예측을 수행하는 단계를 포함하되,
상기 변환 유닛 각각에 대하여 인트라 예측을 수행하는 단계는, 상기 인트라 예측 모드에 기초하여 상기 참조 샘플에 대하여 필터링을 수행하는 단계를 더 포함하고,
상기 처리 블록의 분할 방향은 수평 방향 또는 수직 방향 중 하나이며,
상기 참조 샘플의 개수는 상기 분할된 변환 유닛의 크기에 기반하여 결정되는 것을 특징으로 하는 인트라 예측 모드 기반 영상 처리 방법. - 제7항에 있어서,
상기 처리 블록의 인트라 예측 모드를 기반으로 상기 처리 블록이 정방형의 쿼드-트리 방식으로 분할되는지 상기 인트라 예측 모드의 예측 방향에 수직하여 분할되는지 결정하는 인트라 예측 모드 기반 영상 처리 방법. - 제7항에 있어서,
상기 변환 유닛을 정방형의 블록으로 재구성하는 단계; 및
상기 재구성된 변환 유닛을 대상으로 변환/역변환을 수행하는 단계를 더 포함하는 인트라 예측 모드 기반 영상 처리 방법. - 제7항에 있어서,
상기 참조 샘플은 상기 변환 유닛의 좌측(left) 경계에 인접한 샘플, 상기 변환 유닛의 상측(top) 경계에 인접한 샘플 및 상기 변환 유닛의 좌상측(top-left)에 이웃하는 샘플로 구성되는 인트라 예측 모드 기반 영상 처리 방법. - 영상 처리에 의해 생성된 비트스트림을 저장하기 위한 영상 판독 매체에 있어서, 상기 비트스트림은,
처리 블록이 복수의 변환 유닛으로 분할되는지 여부를 결정하는 데 이용되는 정보;
상기 변환 유닛 각각에 대하여 참조 샘플을 구성하는 데 이용되는 정보; 및
인트라 예측 모드에 기초하여, 상기 구성된 참조 샘플에 대해 필터링을 수행하는 데 이용되는 정보를 포함하되,
상기 처리 블록이 분할되는 것에 기초하여, 상기 처리 블록의 분할 방향은 수평 방향 또는 수직 방향 중 하나이며,
상기 참조 샘플의 개수는 상기 분할된 변환 유닛의 크기에 기반하여 결정되는 것을 특징으로 하는 영상 판독 매체. - 제11항에 있어서,
상기 변환 유닛을 정방형의 블록으로 재구성하는 데 이용되는 정보; 및
상기 재구성된 변환 유닛을 대상으로 변환/역변환을 수행하는 데 이용되는 정보를 더 포함하는 영상 판독 매체. - 제11항에 있어서,
상기 참조 샘플은 상기 변환 유닛의 좌측(left) 경계에 인접한 샘플, 상기 변환 유닛의 상측(top) 경계에 인접한 샘플 및 상기 변환 유닛의 좌상측(top-left)에 이웃하는 샘플로 구성되는 영상 판독 매체.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020217013414A KR102351431B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562137163P | 2015-03-23 | 2015-03-23 | |
| US62/137,163 | 2015-03-23 | ||
| PCT/KR2015/013170 WO2016153146A1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177025558A Division KR102145439B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020217013414A Division KR102351431B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200097825A true KR20200097825A (ko) | 2020-08-19 |
| KR102250070B1 KR102250070B1 (ko) | 2021-05-11 |
Family
ID=56979260
Family Applications (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177025558A Active KR102145439B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| KR1020227000944A Active KR102403685B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| KR1020237019499A Active KR102713349B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| KR1020207023177A Active KR102250070B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| KR1020227017708A Active KR102543471B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| KR1020217013414A Active KR102351431B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
Family Applications Before (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177025558A Active KR102145439B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| KR1020227000944A Active KR102403685B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| KR1020237019499A Active KR102713349B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227017708A Active KR102543471B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| KR1020217013414A Active KR102351431B1 (ko) | 2015-03-23 | 2015-12-03 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
Country Status (8)
| Country | Link |
|---|---|
| US (5) | US10506238B2 (ko) |
| EP (1) | EP3276958B1 (ko) |
| KR (6) | KR102145439B1 (ko) |
| CN (4) | CN111885380B (ko) |
| ES (1) | ES3025145T3 (ko) |
| HU (1) | HUE071425T2 (ko) |
| PT (1) | PT3276958T (ko) |
| WO (1) | WO2016153146A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024080706A1 (ko) * | 2022-10-10 | 2024-04-18 | 엘지전자 주식회사 | 영상 인코딩/디코딩 방법 및 장치, 그리고 비트스트림을 저장한 기록 매체 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| HUE071425T2 (hu) * | 2015-03-23 | 2025-08-28 | Vivo Mobile Communication Co Ltd | Eljárás kép feldolgozására intrapredikciós mód alapján és berendezés ahhoz |
| CN116506602A (zh) * | 2016-03-11 | 2023-07-28 | 数字洞察力有限公司 | 视频编码方法以及装置 |
| KR102357282B1 (ko) * | 2016-10-14 | 2022-01-28 | 세종대학교산학협력단 | 영상의 부호화/복호화 방법 및 장치 |
| KR20230033027A (ko) * | 2016-11-01 | 2023-03-07 | 삼성전자주식회사 | 부호화 방법 및 그 장치, 복호화 방법 및 그 장치 |
| CN117119186A (zh) | 2017-01-02 | 2023-11-24 | Lx 半导体科技有限公司 | 图像编码/解码设备以及发送图像数据的设备 |
| CA3065490C (en) * | 2017-05-17 | 2022-06-07 | Kt Corporation | Video signal processing in which intra prediction is performed in units of sub-blocks partitioned from coding block |
| CN116828206B (zh) * | 2017-05-17 | 2026-03-20 | 株式会社Kt | 用于解码视频的方法和用于编码视频的方法 |
| WO2019022537A1 (ko) * | 2017-07-26 | 2019-01-31 | 엘지전자 주식회사 | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| CA3074127C (en) | 2017-12-06 | 2023-06-13 | Fujitsu Limited | Methods and apparatuses for coding and decoding mode information and electronic device |
| US10771781B2 (en) * | 2018-03-12 | 2020-09-08 | Electronics And Telecommunications Research Institute | Method and apparatus for deriving intra prediction mode |
| EP3793195A4 (en) | 2018-05-10 | 2022-03-30 | Samsung Electronics Co., Ltd. | PICTURE CODING METHOD AND APPARATUS, AND PICTURE DECODING METHOD AND APPARATUS |
| WO2019234604A1 (en) * | 2018-06-05 | 2019-12-12 | Beijing Bytedance Network Technology Co., Ltd. | Extended quad-tree with asymmetric sub-blocks |
| US11818340B2 (en) | 2018-07-06 | 2023-11-14 | Electronics And Telecommunications Research Institute | Image encoding/decoding method and device, and recording medium in which bitstream is stored |
| CN119363978A (zh) * | 2018-08-24 | 2025-01-24 | 三星电子株式会社 | 视频解码方法和设备、以及视频编码方法和设备 |
| KR20200026758A (ko) | 2018-09-03 | 2020-03-11 | 한국전자통신연구원 | 영상 부호화/복호화 방법, 장치 및 비트스트림을 저장한 기록 매체 |
| BR112021004326A2 (pt) | 2018-09-07 | 2021-07-20 | B1 Institute Of Image Technology, Inc. | método e dispositivo de codificação/decodificação de imagem |
| CN112740688B (zh) | 2018-09-17 | 2024-11-26 | 韩国电子通信研究院 | 图像编码/解码方法和设备以及存储比特流的记录介质 |
| US11533506B2 (en) * | 2019-02-08 | 2022-12-20 | Tencent America LLC | Method and apparatus for video coding |
| US11368698B2 (en) * | 2019-04-16 | 2022-06-21 | Tencent America LLC | Method and apparatus for video coding using planar intra prediction mode for intra sub-partition coding mode |
| WO2020253528A1 (en) | 2019-06-17 | 2020-12-24 | Zhejiang Dahua Technology Co., Ltd. | Systems and methods for predicting a coding block |
| CN110166774B (zh) * | 2019-06-25 | 2021-08-31 | 浙江大华技术股份有限公司 | 帧内预测方法、视频编码方法、视频处理装置、存储介质 |
| CN116074519A (zh) * | 2022-11-21 | 2023-05-05 | 浙江大华技术股份有限公司 | 帧内预测方法、编码方法、解码方法及装置 |
| US20250150586A1 (en) * | 2023-11-03 | 2025-05-08 | Tencent America LLC | Direction-adaptive region-based prediction combination |
| WO2025150790A1 (ko) * | 2024-01-08 | 2025-07-17 | 주식회사 엘엑스 세미콘 | 방향성 인트라 예측 기반 영상 코딩 방법 및 그 장치 |
| EP4629615A1 (en) * | 2024-04-02 | 2025-10-08 | InterDigital CE Patent Holdings, SAS | Combining the intra sub-partition (isp) mode and the combination intra-inter partition mode (ciip) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010002214A2 (ko) * | 2008-07-02 | 2010-01-07 | 삼성전자 주식회사 | 영상의 부호화 방법 및 장치, 그 복호화 방법 및 장치 |
| KR20110001885A (ko) * | 2009-06-30 | 2011-01-06 | 한국전자통신연구원 | 수퍼 매크로 블록 기반의 인트라 부호화 방법 및 장치 |
| US20110158315A1 (en) * | 2008-09-03 | 2011-06-30 | Sk Telecom Co., Ltd. | Device and method for image encoding/decoding using prediction direction conversion and selective encoding |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100281967B1 (ko) * | 1998-08-31 | 2001-02-15 | 전주범 | 공간 상관성을 이용한 영상 부호화 장치 및 그 방법 |
| US7646815B2 (en) * | 2003-07-15 | 2010-01-12 | Lsi Corporation | Intra estimation chroma mode 0 sub-block dependent prediction |
| US7010044B2 (en) * | 2003-07-18 | 2006-03-07 | Lsi Logic Corporation | Intra 4×4 modes 3, 7 and 8 availability determination intra estimation and compensation |
| JP2006005438A (ja) | 2004-06-15 | 2006-01-05 | Sony Corp | 画像処理装置およびその方法 |
| US7876833B2 (en) * | 2005-04-11 | 2011-01-25 | Sharp Laboratories Of America, Inc. | Method and apparatus for adaptive up-scaling for spatially scalable coding |
| US20080123977A1 (en) * | 2005-07-22 | 2008-05-29 | Mitsubishi Electric Corporation | Image encoder and image decoder, image encoding method and image decoding method, image encoding program and image decoding program, and computer readable recording medium recorded with image encoding program and computer readable recording medium recorded with image decoding program |
| KR100727972B1 (ko) * | 2005-09-06 | 2007-06-14 | 삼성전자주식회사 | 영상의 인트라 예측 부호화, 복호화 방법 및 장치 |
| JP4789200B2 (ja) * | 2006-08-07 | 2011-10-12 | ルネサスエレクトロニクス株式会社 | 動画符号化と動画復号とのいずれかを実行する機能モジュールおよびそれを含む半導体集積回路 |
| WO2009028922A2 (en) * | 2007-09-02 | 2009-03-05 | Lg Electronics Inc. | A method and an apparatus for processing a video signal |
| KR101291196B1 (ko) * | 2008-01-25 | 2013-07-31 | 삼성전자주식회사 | 영상의 부호화, 복호화 방법 및 장치 |
| KR101379187B1 (ko) * | 2008-06-23 | 2014-04-15 | 에스케이 텔레콤주식회사 | 블록 변환을 이용한 인트라 예측 방법 및 장치와 그를이용한 영상 부호화/복호화 방법 및 장치 |
| CN101389032A (zh) * | 2008-10-24 | 2009-03-18 | 北京工商大学 | 一种基于图像插值的帧内预测编码方法 |
| KR101128580B1 (ko) | 2009-04-09 | 2012-03-23 | 한국전자통신연구원 | 화면내 예측 시스템에서 최적 모드를 예측하는 장치 및 방법 |
| KR101702553B1 (ko) * | 2009-07-04 | 2017-02-03 | 에스케이 텔레콤주식회사 | 영상 부호화/복호화 방법 및 장치 |
| KR101507344B1 (ko) | 2009-08-21 | 2015-03-31 | 에스케이 텔레콤주식회사 | 가변 길이 부호를 이용한 인트라 예측모드 부호화 방법과 장치, 및 이를 위한기록 매체 |
| US8494120B2 (en) | 2009-11-18 | 2013-07-23 | General Instrument Corporation | Detecting foreign voltage faults in telephone customer premise equipment |
| WO2011096770A2 (ko) * | 2010-02-02 | 2011-08-11 | (주)휴맥스 | 영상 부호화/복호화 장치 및 방법 |
| KR101579392B1 (ko) * | 2010-09-27 | 2015-12-21 | 엘지전자 주식회사 | 블록 분할 방법 및 복호화 장치 |
| CA3052614C (en) * | 2010-09-30 | 2021-03-09 | Mitsubishi Electric Corporation | Moving image encoding device, moving image decoding device, moving image coding method, and moving image decoding method |
| US8923395B2 (en) * | 2010-10-01 | 2014-12-30 | Qualcomm Incorporated | Video coding using intra-prediction |
| WO2012046435A1 (ja) * | 2010-10-04 | 2012-04-12 | パナソニック株式会社 | 画像処理装置、画像符号化方法および画像処理方法 |
| EP2664139A2 (en) * | 2011-01-14 | 2013-11-20 | Telefonaktiebolaget LM Ericsson (PUBL) | A method for deblocking filter control and a deblocking filtering control device |
| WO2013005967A2 (ko) * | 2011-07-05 | 2013-01-10 | 한국전자통신연구원 | 영상 정보 부호화 방법 및 복호화 방법 |
| EP2745519B1 (en) * | 2011-08-17 | 2017-09-27 | MediaTek Singapore Pte Ltd. | Method and apparatus for intra prediction using non-square blocks |
| US9787982B2 (en) * | 2011-09-12 | 2017-10-10 | Qualcomm Incorporated | Non-square transform units and prediction units in video coding |
| RS66687B1 (sr) * | 2011-10-18 | 2025-05-30 | Lg Electronics Inc | Postupak za dekodiranje slika, postupak za kodiranje slika, računarski čitljiv medijum za čuvanje podataka i postupak za prenos podataka za sliku |
| CN103118250B (zh) * | 2011-11-16 | 2017-09-26 | 中兴通讯股份有限公司 | 一种帧内划分标志的编解码方法及装置 |
| CN103222266B (zh) * | 2011-11-21 | 2018-02-23 | 松下知识产权经营株式会社 | 图像处理装置以及图像处理方法 |
| WO2013076897A1 (ja) * | 2011-11-24 | 2013-05-30 | パナソニック株式会社 | 画像処理装置および画像処理方法 |
| WO2013099285A1 (ja) * | 2011-12-28 | 2013-07-04 | 株式会社Jvcケンウッド | 動画像符号化装置、動画像符号化方法及び動画像符号化プログラム、並びに動画像復号装置、動画像復号方法及び動画像復号プログラム |
| WO2013109123A1 (ko) * | 2012-01-19 | 2013-07-25 | 삼성전자 주식회사 | 인트라 예측 처리 속도 향상을 위한 비디오의 부호화 방법 및 장치, 비디오의 복호화 방법 및 장치 |
| AU2012200345B2 (en) * | 2012-01-20 | 2014-05-01 | Canon Kabushiki Kaisha | Method, apparatus and system for encoding and decoding the significance map residual coefficients of a transform unit |
| US9277212B2 (en) * | 2012-07-09 | 2016-03-01 | Qualcomm Incorporated | Intra mode extensions for difference domain intra prediction |
| WO2014084106A1 (ja) * | 2012-11-30 | 2014-06-05 | ソニー株式会社 | 画像処理装置および方法 |
| US20150016516A1 (en) * | 2013-07-15 | 2015-01-15 | Samsung Electronics Co., Ltd. | Method for intra prediction improvements for oblique modes in video coding |
| HUE071425T2 (hu) * | 2015-03-23 | 2025-08-28 | Vivo Mobile Communication Co Ltd | Eljárás kép feldolgozására intrapredikciós mód alapján és berendezés ahhoz |
-
2015
- 2015-12-03 HU HUE15886592A patent/HUE071425T2/hu unknown
- 2015-12-03 CN CN202010589793.0A patent/CN111885380B/zh active Active
- 2015-12-03 KR KR1020177025558A patent/KR102145439B1/ko active Active
- 2015-12-03 CN CN202010589798.3A patent/CN111885381B/zh active Active
- 2015-12-03 CN CN201580078205.4A patent/CN107409207B/zh active Active
- 2015-12-03 PT PT158865923T patent/PT3276958T/pt unknown
- 2015-12-03 ES ES15886592T patent/ES3025145T3/es active Active
- 2015-12-03 KR KR1020227000944A patent/KR102403685B1/ko active Active
- 2015-12-03 KR KR1020237019499A patent/KR102713349B1/ko active Active
- 2015-12-03 KR KR1020207023177A patent/KR102250070B1/ko active Active
- 2015-12-03 WO PCT/KR2015/013170 patent/WO2016153146A1/ko not_active Ceased
- 2015-12-03 KR KR1020227017708A patent/KR102543471B1/ko active Active
- 2015-12-03 EP EP15886592.3A patent/EP3276958B1/en active Active
- 2015-12-03 CN CN202010589769.7A patent/CN111885379B/zh active Active
- 2015-12-03 US US15/560,651 patent/US10506238B2/en active Active
- 2015-12-03 KR KR1020217013414A patent/KR102351431B1/ko active Active
-
2019
- 2019-11-07 US US16/677,100 patent/US10880553B2/en active Active
-
2020
- 2020-11-20 US US17/100,011 patent/US11575907B2/en active Active
-
2022
- 2022-12-27 US US18/089,429 patent/US12028531B2/en active Active
-
2024
- 2024-05-22 US US18/670,978 patent/US12389012B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010002214A2 (ko) * | 2008-07-02 | 2010-01-07 | 삼성전자 주식회사 | 영상의 부호화 방법 및 장치, 그 복호화 방법 및 장치 |
| US20110158315A1 (en) * | 2008-09-03 | 2011-06-30 | Sk Telecom Co., Ltd. | Device and method for image encoding/decoding using prediction direction conversion and selective encoding |
| KR20110001885A (ko) * | 2009-06-30 | 2011-01-06 | 한국전자통신연구원 | 수퍼 매크로 블록 기반의 인트라 부호화 방법 및 장치 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024080706A1 (ko) * | 2022-10-10 | 2024-04-18 | 엘지전자 주식회사 | 영상 인코딩/디코딩 방법 및 장치, 그리고 비트스트림을 저장한 기록 매체 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102145439B1 (ko) | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 | |
| US12316836B2 (en) | Intra-prediction mode-based image processing method and device therefor | |
| KR102549987B1 (ko) | 영상 처리 방법 및 이를 위한 장치 | |
| KR102351029B1 (ko) | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 | |
| US10631013B2 (en) | Method for re-positioning significant coefficient in image encoding/decoding process and device therefor | |
| US10554980B2 (en) | Method for processing image on basis of intra prediction mode and device therefor | |
| US20190238840A1 (en) | Method for processing picture based on intra-prediction mode and apparatus for same | |
| KR20180009048A (ko) | 영상의 부호화/복호화 방법 및 이를 위한 장치 | |
| US20200288146A1 (en) | Intra-prediction mode-based image processing method and apparatus therefor | |
| HK1219596B (en) | Wedgelet pattern extension for depth intra coding |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| PA0104 | Divisional application for international application |
St.27 status event code: A-0-1-A10-A18-div-PA0104 St.27 status event code: A-0-1-A10-A16-div-PA0104 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| A107 | Divisional application of patent | ||
| GRNT | Written decision to grant | ||
| PA0104 | Divisional application for international application |
St.27 status event code: A-0-1-A10-A18-div-PA0104 St.27 status event code: A-0-1-A10-A16-div-PA0104 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R14-asn-PN2301 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |