KR20210000355A - 기판 처리 장치 및 방법 - Google Patents
기판 처리 장치 및 방법 Download PDFInfo
- Publication number
- KR20210000355A KR20210000355A KR1020190075034A KR20190075034A KR20210000355A KR 20210000355 A KR20210000355 A KR 20210000355A KR 1020190075034 A KR1020190075034 A KR 1020190075034A KR 20190075034 A KR20190075034 A KR 20190075034A KR 20210000355 A KR20210000355 A KR 20210000355A
- Authority
- KR
- South Korea
- Prior art keywords
- substrate
- liquid
- back nozzle
- processing
- nozzle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/04—Apparatus for manufacture or treatment
- H10P72/0402—Apparatus for fluid treatment
- H10P72/0406—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like
- H10P72/0411—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing
- H10P72/0414—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing using mainly spraying means, e.g. nozzles
-
- H01L21/67051—
-
- H01L21/02052—
-
- H01L21/02057—
-
- H01L21/027—
-
- H01L21/6715—
-
- H01L21/67259—
-
- H01L21/683—
-
- H01L21/68764—
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P70/00—Cleaning of wafers, substrates or parts of devices
- H10P70/10—Cleaning before device manufacture, i.e. Begin-Of-Line process
- H10P70/15—Cleaning before device manufacture, i.e. Begin-Of-Line process by wet cleaning only
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P70/00—Cleaning of wafers, substrates or parts of devices
- H10P70/20—Cleaning during device manufacture
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/04—Apparatus for manufacture or treatment
- H10P72/0448—Apparatus for applying a liquid, a resin, an ink or the like
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/06—Apparatus for monitoring, sorting, marking, testing or measuring
- H10P72/0606—Position monitoring, e.g. misposition detection or presence detection
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/76—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches
- H10P72/7604—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support
- H10P72/7618—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support characterised by a movable susceptor, stage or support, others than those only rotating on their own vertical axis, e.g. susceptors on a rotating carrousel
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P76/00—Manufacture or treatment of masks on semiconductor bodies, e.g. by lithography or photolithography
Landscapes
- Cleaning Or Drying Semiconductors (AREA)
Abstract
기판을 액 처리하는 장치는 내부에 처리 공간을 제공하는 처리 용기, 상기 처리 공간에서 기판을 지지하는 기판 지지 유닛, 그리고 상기 기판 지지 유닛에 지지된 기판으로 액을 공급하는 액 공급 유닛을 포함하되, 상기 기판 지지 유닛은 기판의 중심 영역이 놓이며, 기판의 가장자리 영역이 외부에 노출되도록 기판을 지지하고, 회전 가능한 지지판을 포함하며, 상기 액 공급 유닛은 상기 지지판의 아래에서 기판의 저면으로 액을 공급하는 백노즐 및 상기 백노즐로부터 토출되는 액의 토출 위치가 제1위치와 상기 제1위치보다 기판의 중심에서 멀리 떨어진 제2위치로 변경되도록 상기 백노즐을 구동시키는 구동기를 포함한다.
Description
도 2는 도 1의 제2노즐에 의해 기판의 상면에 액이 공급되는 영역을 보여주는 평면도이다.
도 3은 본 발명의 일 실시 예에 따른 기판 처리 장치를 개략적으로 보여주는 사시도이다.
도 4는 도 3의 도포 블럭 또는 현상 블럭을 보여주는 기판 처리 장치의 단면도이다.
도 5는 도 3의 기판 처리 장치의 평면도이다.
도 6은 도 5의 반송 로봇의 핸드의 일 예를 보여주는 도면이다.
도 7은 도 5의 열처리 챔버의 일 예를 개략적으로 보여주는 평면도이다.
도 8은 도 7의 열처리 챔버의 정면도이다.
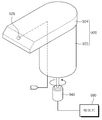
도 9는 도 5의 액 처리 챔버의 일 예를 개략적으로 보여주는 도면이다.
도 10은 도 9의 백노즐의 제1실시예를 보여주는 사시도이다.
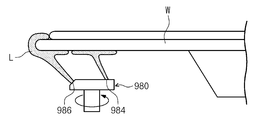
도 11 내지 도 13은 도 8의 백노즐을 구동되는 과정을 보여주는 단면도들이다.
도 14는 도 12 및 도 13의 백노즐에서 공급되는 액의 토출 위치 보여주는 평면도이다.
도 15는 도 10의 제2실시예의 백 노즐의 구동 과정을 보여주는 단면도이다.
도 16은 도 10의 제3실시예의 백 노즐의 구동 과정을 보여주는 단면도이다.
834: 회전축 836: 지지 바디
920: 백노즐 922: 몸통부
924; 토출부
Claims (19)
- 기판을 액 처리하는 장치에 있어서,
내부에 처리 공간을 제공하는 처리 용기와;
상기 처리 공간에서 기판을 지지하는 기판 지지 유닛과;
상기 기판 지지 유닛에 지지된 기판으로 액을 공급하는 액 공급 유닛을 포함하되,
상기 기판 지지 유닛은,
기판의 중심 영역이 놓이며, 기판의 가장자리 영역이 외부에 노출되도록 기판을 지지하고, 회전 가능한 지지판을 포함하며,
상기 액 공급 유닛은,
상기 지지판의 아래에서 기판의 저면으로 액을 공급하는 백노즐과;
상기 백노즐로부터 토출되는 액의 토출 위치가 제1위치와 상기 제1위치보다 기판의 중심에서 멀리 떨어진 제2위치로 변경되도록 상기 백노즐을 구동시키는 구동기를 포함하는 기판 처리 장치. - 제1항에 있어서,
상기 구동기를 제어하는 제어기를 더 포함하되,
상기 제어기는 상기 제2위치로 액을 토출하는 중에, 상기 구동기에 의해 상기 제2위치를 중심으로 일정 범위 내에서 토출 위치가 계속적으로 변경되도록 상기 구동기를 제어하는 기판 처리 장치. - 제2항에 있어서,
상기 기판 지지 유닛은
상기 지지판을 지지하며, 회전되는 회전축과;
상기 회전축을 감싸며, 상기 지지판보다 큰 직경을 가지는 지지 바디를 포함하되,
상기 백노즐은 상기 지지 바디에 설치되는 기판 처리 장치. - 제1항 내지 제3항 중 어느 한 항에 있어서,
상기 백노즐의 위치 변경은 상기 백노즐을 회전에 의해 이루어지도록 제공되는 기판 처리 장치. - 제4항에 있어서,
상기 백노즐은,
상기 구동기에 의해 회전 가능한 몸통부와;
상기 몸통부에 지지되며, 액이 토출되는 토출구가 형성되는 토출부를 포함하되,
상기 토출구 및 상기 토출구에 액을 공급하는 토출 라인은 상기 몸통부의 중심축으로부터 이격되게 위치되는 기판 처리 장치. - 제5항에 있어서,
상기 토출구는 위로 갈수록 상기 중심축으로부터 멀어지거나 가까워지는 방향을 향하는 기판 처리 장치. - 제1항 내지 제3항 중 어느 한 항에 있어서,
상기 백노즐의 위치 변경은 상기 백노즐을 직선 이동에 의해 이루어지도록 제공되는 기판 처리 장치. - 제7항에 있어서,
상기 구동기는,
길이 방향이 상부에서 바라볼 때 기판의 중심축으로부터 멀어지는 방향으로 연장되는 가이드와;
상기 가이드의 길이 방향을 따라 이동 가능한 브라켓과;
상기 브라켓이 이동되도록 구동력을 제공하는 모터를 포함하고,
상기 백노즐은 상기 브라켓에 설치되는 기판 처리 장치. - 제8항에 있어서,
상기 백노즐의 토출구는 기판의 중심축으로부터 멀어질수록 상향 경사진 방향을 향하도록 형성되는 기판 처리 장치. - 기판을 액 처리하는 장치에 있어서,
내부에 처리 공간을 제공하는 처리 용기와;
상기 처리 공간에서 기판을 지지하는 기판 지지 유닛과;
상기 기판 지지 유닛에 지지된 기판으로 액을 공급하는 액 공급 유닛을 포함하되,
상기 기판 지지 유닛은,
기판의 중심 영역이 놓이며, 기판의 가장자리 영역이 외부에 노출되도록 기판을 지지하고, 회전 가능한 지지판을 포함하며,
상기 액 공급 유닛은,
상기 지지판의 아래에서 기판의 저면으로 액을 공급하는 백노즐을 포함하되,
상기 백 노즐에는 기판의 저면인 제1위치로 액을 토출하는 제1토출구와 상기 제1위치보다 기판의 중심에서 멀리 떨어진 기판의 저면인 제2위치로 액을 토출하는 제2토출구가 형성되는 기판 처리 장치. - 제10항에 있어서,
상기 액 공급 유닛은,
상기 백노즐을 회전시키는 구동기를 더 포함하되,
상기 백노즐은,
상기 구동기에 의해 회전 가능한 몸통부와;
상기 몸통부의 상단으로부터 수직한 방향으로 연장되며 상기 제1토출구가 형성되는 제1토출부와;
상기 몸통부의 상단으로부터 상기 제1토출부와 반대되는 방향으로 연장되며 상기 제2토출구가 형성되는 제2토출부를 포함하는 기판 처리 장치. - 제11항에 있어서,
상기 제1토출구 및 상기 제2토출구 각각은 기판의 중심축으로부터 멀어질수록 상향 경사진 방향을 향하도록 제공되는 기판 처리 장치. - 기판을 액 처리하는 방법에 있어서
회전되는 상기 기판의 저면에 액을 공급하여 상기 기판을 액 처리하되,
상기 기판의 아래에 위치되는 백 노즐은 상기 액을 상기 기판의 저면인 제1위치로 토출하여 상기 기판의 저면을 액 처리하고, 상기 액을 상기 제1위치보다 상기 기판의 중심에서 멀리 떨어지며 상기 기판의 저면인 제2위치로 토출하여 상기 기판의 베벨부를 액 처리하는 기판 처리 방법. - 제13항에 있어서,
상기 액은 상기 제1위치로 토출된 후에 상기 제2위치로 토출되는 기판 처리 방법. - 제14항에 있어서,
상기 제1위치로 상기 액을 토출하는 것과 상기 제2위치로 상기 액을 토출하는 것 간의 변경은 상기 백 노즐을 회전 이동시킴으로써 이루어지는 기판 처리 방법. - 제13항 내지 제14항 중 어느 한 항에 있어서,
상기 제1위치에서 상기 기판을 액 처리하는 것은 상기 기판의 저면을 세정하는 세정 처리이고,
상기 제2위치에서 상기 기판을 액 처리하는 것은 상기 기판의 상면의 베벨부 영역에서 막질을 제거하는 제거 처리인 기판 처리 방법. - 제16항에 있어서,
상기 제2위치로 상기 액을 토출하는 중에는 상기 제2위치를 중심으로 일정 범위 내에서 토출 위치가 계속적으로 변경되는 기판 처리 방법. - 제17항에 있어서,
상기 기판의 상면에는 복수의 칩에 제공되며,
상기 제2위치를 중심으로 일정 범위 내에서 계속적으로 변경되는 토출되는 상기 칩에 액이 제공되지 않도록 하는 토출 위치인 기판 처리 방법. - 제18항에 있어서,
상기 세정 처리 및 상기 제거 처리는 상기 기판에 포토레지스트를 공급하는 처리 이후에 이루어지고,
상기 제거 처리에서 제거되는 막질은 포토레지스트 막인 기판 처리 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190075034A KR102378337B1 (ko) | 2019-06-24 | 2019-06-24 | 기판 처리 장치 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190075034A KR102378337B1 (ko) | 2019-06-24 | 2019-06-24 | 기판 처리 장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20210000355A true KR20210000355A (ko) | 2021-01-05 |
| KR102378337B1 KR102378337B1 (ko) | 2022-03-25 |
Family
ID=74140733
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190075034A Active KR102378337B1 (ko) | 2019-06-24 | 2019-06-24 | 기판 처리 장치 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102378337B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230024704A (ko) * | 2021-08-12 | 2023-02-21 | 세메스 주식회사 | 기판 처리 장치 및 기판 처리 방법 |
| KR20240103936A (ko) | 2022-12-27 | 2024-07-04 | 세메스 주식회사 | 기판처리장치 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100637718B1 (ko) * | 2005-10-04 | 2006-10-25 | 세메스 주식회사 | 매엽식 반도체 에칭 장비 |
| KR20140114296A (ko) * | 2013-03-18 | 2014-09-26 | 도쿄엘렉트론가부시키가이샤 | 액 처리 장치 |
-
2019
- 2019-06-24 KR KR1020190075034A patent/KR102378337B1/ko active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100637718B1 (ko) * | 2005-10-04 | 2006-10-25 | 세메스 주식회사 | 매엽식 반도체 에칭 장비 |
| KR20140114296A (ko) * | 2013-03-18 | 2014-09-26 | 도쿄엘렉트론가부시키가이샤 | 액 처리 장치 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230024704A (ko) * | 2021-08-12 | 2023-02-21 | 세메스 주식회사 | 기판 처리 장치 및 기판 처리 방법 |
| KR20240103936A (ko) | 2022-12-27 | 2024-07-04 | 세메스 주식회사 | 기판처리장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102378337B1 (ko) | 2022-03-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101798320B1 (ko) | 기판 처리 장치 | |
| US7722267B2 (en) | Substrate processing apparatus | |
| KR102359530B1 (ko) | 기판 처리 방법, 기판 처리 장치, 그리고 용기 세정 방법 | |
| KR101977752B1 (ko) | 기판 처리 장치 및 방법 | |
| US20220075280A1 (en) | Cleaning jig, substrate treating apparatus including the same, cleaning method of substrate treating apparatus | |
| KR102121240B1 (ko) | 기판 처리 장치 및 방법 | |
| KR102303594B1 (ko) | 기판 처리 장치 및 방법 | |
| KR102666439B1 (ko) | 노즐 장치 및 기판 처리 장치 | |
| KR102288984B1 (ko) | 기판 처리 장치 및 방법 | |
| KR102378337B1 (ko) | 기판 처리 장치 및 방법 | |
| KR102243066B1 (ko) | 기판 처리 장치 | |
| KR102270937B1 (ko) | 기판 처리 장치 및 방법 | |
| KR102324407B1 (ko) | 액 공급 유닛 및 이를 가지는 기판 처리 장치 및 방법 | |
| KR20200093087A (ko) | 기판 처리 장치 및 방법 | |
| KR20210011197A (ko) | 기판 처리 장치 | |
| KR101884854B1 (ko) | 기판 처리 장치 및 방법 | |
| KR102682854B1 (ko) | 기판 처리 방법 및 기판 처리 장치 | |
| KR102289939B1 (ko) | 기판 처리 장치 및 방법 | |
| KR102175076B1 (ko) | 기판 처리 장치 및 방법 | |
| KR102330278B1 (ko) | 기판 처리 방법 및 장치 | |
| KR102010261B1 (ko) | 기판 처리 장치 및 방법 | |
| KR102701436B1 (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| KR102746475B1 (ko) | 액 공급 유닛 및 이를 포함하는 기판 처리 장치 | |
| KR102882539B1 (ko) | 액 공급 유닛 및 이를 포함하는 기판 처리 장치 | |
| KR102243063B1 (ko) | 액 공급 유닛, 기판 처리 장치, 그리고 기판 처리 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| X091 | Application refused [patent] | ||
| AMND | Amendment | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0901 | Re-examination |
St.27 status event code: A-2-3-E10-E12-rex-PX0901 |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0701 | Decision of registration after re-examination |
St.27 status event code: A-3-4-F10-F13-rex-PX0701 |
|
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |