KR20210120007A - 운송 보트를 검출하는 장치, 시스템 및 방법 - Google Patents
운송 보트를 검출하는 장치, 시스템 및 방법 Download PDFInfo
- Publication number
- KR20210120007A KR20210120007A KR1020217025043A KR20217025043A KR20210120007A KR 20210120007 A KR20210120007 A KR 20210120007A KR 1020217025043 A KR1020217025043 A KR 1020217025043A KR 20217025043 A KR20217025043 A KR 20217025043A KR 20210120007 A KR20210120007 A KR 20210120007A
- Authority
- KR
- South Korea
- Prior art keywords
- contact
- connecting element
- transport
- contact element
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21C—NUCLEAR REACTORS
- G21C21/00—Apparatus or processes specially adapted to the manufacture of reactors or parts thereof
- G21C21/02—Manufacture of fuel elements or breeder elements contained in non-active casings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F27—FURNACES; KILNS; OVENS; RETORTS
- F27B—FURNACES, KILNS, OVENS OR RETORTS IN GENERAL; OPEN SINTERING OR LIKE APPARATUS
- F27B21/00—Open or uncovered sintering apparatus; Other heat-treatment apparatus of like construction
- F27B21/04—Sintering pots or sintering pans
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F27—FURNACES; KILNS; OVENS; RETORTS
- F27D—DETAILS OR ACCESSORIES OF FURNACES, KILNS, OVENS OR RETORTS, IN SO FAR AS THEY ARE OF KINDS OCCURRING IN MORE THAN ONE KIND OF FURNACE
- F27D19/00—Arrangements of controlling devices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F27—FURNACES; KILNS; OVENS; RETORTS
- F27D—DETAILS OR ACCESSORIES OF FURNACES, KILNS, OVENS OR RETORTS, IN SO FAR AS THEY ARE OF KINDS OCCURRING IN MORE THAN ONE KIND OF FURNACE
- F27D21/00—Arrangement of monitoring devices; Arrangement of safety devices
- F27D21/04—Arrangement of indicators or alarms
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F27—FURNACES; KILNS; OVENS; RETORTS
- F27D—DETAILS OR ACCESSORIES OF FURNACES, KILNS, OVENS OR RETORTS, IN SO FAR AS THEY ARE OF KINDS OCCURRING IN MORE THAN ONE KIND OF FURNACE
- F27D3/00—Charging; Discharging; Manipulation of charge
- F27D3/02—Skids or tracks for heavy objects
- F27D3/022—Skids
- F27D3/024—Details of skids, e.g. riders
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21C—NUCLEAR REACTORS
- G21C3/00—Reactor fuel elements and their assemblies; Selection of substances for use as reactor fuel elements
- G21C3/42—Selection of substances for use as reactor fuel
- G21C3/58—Solid reactor fuel Pellets made of fissile material
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21C—NUCLEAR REACTORS
- G21C3/00—Reactor fuel elements and their assemblies; Selection of substances for use as reactor fuel elements
- G21C3/42—Selection of substances for use as reactor fuel
- G21C3/58—Solid reactor fuel Pellets made of fissile material
- G21C3/62—Ceramic fuel
- G21C3/623—Oxide fuels
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- High Energy & Nuclear Physics (AREA)
- Manufacturing & Machinery (AREA)
- Chemical & Material Sciences (AREA)
- Ceramic Engineering (AREA)
- Control Of Conveyors (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
본 발명은 운송 보트(62, 64)를 감지하기 위한 장치(10)에 관한 것이다. 장치는 운송 보트(62, 64)와 접촉하는 접촉 요소(12), 및 상기 장치(10)의 하우징(20)에 탄성적으로 장착되어 초기 위치로 바이어스되고, 상기 하우징(20)의 가이드(30)를 통해 선형으로 변위 가능하게 안내되는 연결 요소(14)를 포함한다. 접촉 요소(12)는 스프링 장착 연결 요소(14)에 연결되고, 운송 보트(62, 64)와 접촉 요소(12)의 접촉이, 초기 위치에서 검출 위치까지의 바이어스에 대해, 연결 요소(14)의 편향을 유발하는 방식으로 함께 변위된다. 장치(10)는 연결 요소(14)에 의한 검출 위치의 도달을 검출하는 검출 장치(34)를 더 포함한다.
Description
본 발명은 운송 보트(transport boat), 특히 진공 상태의 공간에 위치한 운송 보트의 위치를 검출하기 위한 장치, 시스템 및 방법에 관한 것이다. 장치, 시스템 및 방법은 운송 보트의 말단 위치를 기계적으로 고정하고 안내하기 위해 추가로 사용된다. 본 발명의 의미 내에서 운송 보트는 영어로 "sintering shoes"로 지칭될 수 있으며, 본 개시내용에 따르면, 또한 다양한 기술 응용분야에 사용되는 운송 플레이트 또는 공작물 캐리어를 포함한다.
운송 보트, 운송 플레이트 또는 공작물 캐리어는 화물 운송을 위한 다양한 기술 분야에서 사용된다.
예를 들어, 운송 보트는 소결로(sintering furnace)에서 MOX 펠릿(mixed oxide pellets, 혼합 산화물 펠릿)을 운반하기 위한 핵 연료 요소의 생산에 실제로 사용된다. 운송 보트는 나중에 운송 보트를 통해 설비 내에 이들 MOX 펠릿을 이동시키기 위해 MOX 펠릿으로 압축된 연료 분말을 적재한다. 예를 들어, 운송 보트는 적재된 MOX 펠릿을 200°C ~ 2000°C의 온도와 80kPa ~ 120kPa의 압력에서 소결하기 위해 소결로로 이동된다. 그런 다음 MOX 펠릿은 후속 하역을 위해 예를 들어 운송 보트를 통해 추가로 운송된다.
운송 보트, 운송 플레이트 또는 공작물 캐리어를 목표로 한 안전하고 정확한 방식으로 설비 내로 이동하고, 예를 들어 이들을 원하는 방식으로 스테이션에서 스테이션으로 이동하기 위해 운송 보트의 위치를 결정할 필요가 있다.
따라서, 본 발명의 과제는 운송 보트의 위치를 검출할 수 있는 장치, 시스템 및 방법을 제공하는 것에 있다. 특히, 이 시스템 및 방법은 진공이 가해지는 환경에서 적용할 수 있어야 한다.
이러한 작업은 독립된 특허 청구항에 따른 장치, 시스템 및 방법에 의해 해결된다. 장치, 시스템 및 방법의 실시예 및 추가 실시예는 종속 청구항의 주제이며, 이하에서 설명한다.
본 발명의 일 양태는 운송 보트, 특히 운송 보트의 위치를 검출하기 위한 장치에 관한 것이다. 이 장치는 운송 보트와 접촉하기 위한 접촉 요소와 장치의 하우징에 장착된 연결 요소 스프링을 포함한다. 연결 요소는 초기 위치로 바이어스되고, 하우징의 가이드를 통해 선형으로 변위 가능하게 가이드된다. 바람직하게는, 연결 요소는 길이방향의 축(longitudinal axis)을 갖는 기다란 형상을 갖고 길이방향의 축을 따라 하우징 내에서 변위될 수 있다. 본 발명에 따른 장치의 접촉 요소는 스프링 장착 연결 요소에 연결되고, 운송 보트와 접촉 요소의 접촉이 초기 위치에서 검출 위치까지의 바이어스에 대해 연결 요소의 편향을 유발하는 방식으로 함께 변위될 수 있다. 이를 위해, 접촉 요소는 특히 스프링 장착 반대 편의 연결 요소의 단부에 부착될 수 있다. 따라서, 접촉 요소 및 연결 요소는 각각 초기 위치로 바이어스되고, 이 바이어스에 대한 접촉 요소와 운송 보트의 접촉에 의해 각각의 초기 위치로부터 검출 위치로 바이어스될 수 있다. 이 장치는 연결 요소에 의한 검출 위치의 도달을 검출하도록 구성된 검출 장치를 더 포함한다. 즉, 운송 보트에 의한 접촉 요소의 편향은 검출 장치에 의해 검출될 수 있다.
검출 장치에 의해 검출될 수 있는 운송 보트에 의한 연결 요소 또는 접촉 요소의 편향 및 이에 의해 유발된 검출 위치의 도달은 운송 보트의 위치에 대한 결론을 도출할 수 있게 하고 따라서 운송 보트의 위치가 검촐된다. 이 장치는 사용자에게 알려진 전체 시스템의 정의된 위치에 배열되기 때문에, 예를 들어 검출 장치가 트리거될 때 접촉 요소와 접촉하는 운송 보트의 위치가 검출될 수 있다. 일 실시예에서, 검출 위치에 도달하는 검출은 연관된 검출 시간 및/또는 추가 설비/공정 파라미터에 연계될 수 있다. 예를 들어, 검출 위치에 도달하는 검출는 운송 보트의 형상 및/또는 치수의 특성과도 연계될 수 있다.
운송 보트의 위치는 또한 검출 위치에서 예를 들어 일시적으로 초기 위치로 다시 이동하는 연결 요소에 의해 검출될 수 있는 것임을 이해해야 한다. 예를 들어, 접촉 요소는 운송 보트와 접촉할 수 있고, 운송 보트가 이동 방향으로 접촉 요소를 따라 움직이는 동안 바이어스에 대하여 운송 보트에 의해 검출 위치에 유지될 수 있다. 이 기간 동안 검출 장치는 검출 위치에 도달하거나 검출 위치를 유지하는 연결 요소를 영구적으로 검출한다. 일 실시예에서, 운송 보트는 장치를 향하는 표면에 리세스(recess)가 있을 수 있다. 이 리세스이 접촉 요소에 도달하자마자 접촉 요소는 연결 요소의 스프링 장착으로 인해 초기 위치로 다시 변위된다. 따라서 검출 장치는 갑자기 더 이상 검출 위치를 탐지하지 않고 대응하는 신호를 생성하여 운송 보트의 위치에 대한 결론을 도출할 수 있다. 이 경우, 예를 들어 운송 보트의 리세스 위치가 알려져 있기 때문에 위치가 정확하게 결정될 수 있다. 전술한 원리는 리세스이 없는 운송 보트에도 적용될 수 있다. 여기에서서 연결 요소는 접촉 요소가 운송 보트와 접촉하지 않을 때, 즉 운송 보트가 장치를 지나 이동하자마자 초기 위치로 다시 이동할 수 있다. 그러나 이 변형은 일련의 운송 보트 사이에 직접적인 접촉이 없는 경우에만 가능하다.
초기 위치는 접촉 요소가 운송 보트와 접촉하지 않는, 즉 운송 보트에 의해 영향을 받지 않는 연결 요소(및 접촉 요소)의 위치일 수 있다. 이와는 달리, 초기 위치는 접촉 요소가 이미 운송 보트와 접촉하고 있지만 운송 보트에 의해 검출 위치로 아직 눌려지지 않은 연결 요소(및 접촉 요소)의 위치일 수 있다. 이 경우, 운송 보트는 예를 들어 장치를 향하는 표면에 돌출부를 가질 수 있다. 이 돌출부는 접촉 요소와 접촉하자마자 접촉 요소를 통해 연결 요소를 검출 위치로 누른다.
본 발명에 따른 검출 위치의 도달 검출은 접촉 요소 및 연결 요소의 기계적 편향에 의해 야기되기 때문에, 본 발명에 따른 장치는 실질적으로 기계적으로 또는 기계적으로 야기된 운송 보트의 위치 검출을 가능하게 한다. 이를 통해 진공이 가해지는 공간이나 장치에 부담을 주는 기타 환경 조건에서 장치를 사용할 수 있으며 여전히 안정적인 검출를 보장한다.
검출 위치는 연결 요소가 미리 결정된 최소 편향을 가질 때까지 도달된 것으로 간주되지 않는 위치일 수 있다. 즉, 검출 장치는 연결 요소가 미리 결정된 최소 편향을 가질 때만 편향을 검출하도록 구성될 수 있다. 이는 검출 장치가 연결 요소의 복수의 위치 사이를 검출 및 구별할 수 있고, 최소 편향에 도달하거나 초과할 때만 연결 요소에 의한 검출 위치의 도달을 정의함으로써 달성될 수 있다. 이와는 달리 또는 추가적으로, 검출 장치는 미리 결정된 최소 편향에 도달할 때만 연결 요소를 검출할 수 있도록 설계될 수 있고, 따라서 검출 장치는 검출 위치에 도달했음을 결정할 수 있다.
예를 들어, 이 최소 편향은 운송 보트와 접촉 요소의 접촉에 의해 달성할 수 있는 최대 편향에 대응할 수 있다. 바람직하게는, 최소 편향은 최대 달성 가능한 편향보다 5mm, 바람직하게는 3mm 미만, 보다 바람직하게는 1.5mm, 더욱 더 바람직하게는 1mm 작을 수 있다.
검출 장치는 연결 요소/접촉 요소에 의해 각각의 검출 위치에 도달했음을 검출했을 때, 또는 운송 보트에 의해 접촉 요소의 편향이 검출되었을 때, 대응하는 신호를 생성하여 제어 시스템에 전송하도록 추가로 구성될 수 있다. 콘트롤러는 본 발명에 따른 장치와 본 발명에 따른 시스템의 구성요소로서 제공되거나, 또는 별도의 구성요소로서 제공될 수 있다.
장치의 일 실시예에서, 접촉 요소는 연결 요소의 제1 단부(스프링 장착과 반대되는 단부)에 회전 가능하게 장착된 접촉 롤러일 수 있다. 예를 들어, 이 접촉 롤러는 볼트를 통해 연결 요소에 연결될 수 있다. 예를 들어, 접촉 롤러는 중앙 보어(bore)를 가질 수 있고 연결 요소의 분기된 단부 섹션(bifurcated end section)의 2개의 아암(arm) 사이에 배열될 수 있으며, 볼트가 2개의 아암 각각의 하나의 보어를 통해 안내된다. 접촉 롤러는 그것과 맞물리는 운송 보트의 접촉 또는 힘에 의해 동시에 편향되고, 운송 보트의 움직임에 의해 회전되어 앞으로 이동하고 운송 보트를 안내할 수 있다. 운송 보트의 유입 방향에 대한 장치의 배치에 따라 운송 보트의 운동 방향은 유지되너가, 예를 들어 90°만큼 편향될 수 있다.
이와 달리, 접촉 요소는 슬라이드 바일 수 있다. 예를 들어, 슬라이드 바는 볼트 또는 나사 연결에 의해 연결 요소의 제1 단부에 부착될 수 있다. 추가 실시예에서, 슬라이드 바는 2개의 장치의 적어도 2개의 연결 요소에 연결될 수 있다. 즉, 적어도 두 개의 장치는 이들을 연결하는 공통 슬라이드 바를 포함할 수 있다. 이 경우 접촉 요소는 공통 슬라이드 바의 일부로 간주된다. 슬라이드 바는 운송 보트가 슬라이드 바의 적어도 하나의 축을 따라, 바람직하게는 슬라이드 바의 실질적으로 상호 직교하는 적어도 2개의 축을 따라 슬라이드 바를 따라 슬라이드 되는 것을 허용하도록 구성될 수 있다. 이것은 운송 보트가 슬라이드 바와 접촉하도록 허가나, 또는 더 정확하게는 그 운동 방향이 유지되거나 예를 들어 90°만큼 편향되로록 할 수 있다.
추가 개발에서, 접촉 요소 및 이에 연결된 연결 요소는 하우징에 회전식으로 고정되어 배열될 수 있다. 이를 위해, 예를 들어 접촉 요소, 연결 요소 및 하우징은 접촉 요소 및 연결 요소의 보어를 통해 연장되고 하우징의 각각의 관련 슬롯 구멍(slotte hole)의 반대쪽 단부에서 변위 가능하게 수용되는 볼트에 의해 상호 연결될 수 있다. 하우징의 슬롯 구멍은 서로 대향하여 배열될 수 있고 연결 요소의 길이방향의 축에 실질적으로 평행하게 연장될 수 있다. 따라서, 슬롯 구멍은 길이방향의 축을 따라 접촉 요소와 연결 요소가 변위되는 것을 허용하면서 연결 요소의 길이방향의 축 둘레로 하우징 내의 접촉 요소 및 연결 요소가 회전하는 것을 방지할 수 있다. 이 변위는 특히 수직 변위일 수 있다. 상부 정지부 및 하부 정지부 또한 접촉 요소 및 이에 연결된 연결 요소의 단부 위치를 정의할 수 있다. 예를 들어, 상부 정지부는 접촉 요소와 연결 요소가 바이어스 되는 초기 위치를 정의할 수 있다.
장치의 일 실시예에서, 연결 요소는 바람직하게는 비원형 단면적을 갖는 샤프트일 수 있다.
장치의 일 실시예에서, 연결 요소는 스프링 장착을 구현하기 위해 스프링 요소의 적어도 일부가 수용되는 리세스(recess)를 가질 수 있다. 이 리세스은, 예를 들어 제1 단부, 즉 접촉 요소로부터 멀어지는 방향을 향하는 단부의 반대 편의 연결 요소의 제2 단부로부터 제1 단부의 방향으로 연장될 수 있다. 리세스은 비원형 단면을 가질 수 있고 연결 요소와 동축으로 배열될 수 있다. 스프링 요소는 기계적 스프링 요소, 바람직하게는 헬리컬 스프링(helical spring)일 수 있다. 이는 스트레스가 많은 환경 조건에서 장치의 안전한 사용성을 더욱 향상시킨다. 스프링 요소는 연결 요소 반대 편의 리세스에 있는 연결 요소 측 정지부를 통해 일 단부에 지지될 수 있고, 하우징 반대 편에 있는 하우징 측 정지부를 통해 반대 쪽 단부에 지지될 수 있다. 이들 정지부는 서로 반대 편에 형성된다. 스프링 요소는 연결 요소와 동축으로 배열될 수 있다.
본 발명에 따른 장치의 다른 실시예에서, 연결 요소는 연결 요소에 의해 검출 위치에 도달할 때 검출 장치에 의해 검출되는 접촉 요소로부터 멀어지는 방향을 향하는 단부 섹션을 포함할 수 있다. 따라서, 단부 섹션은 연결 요소의 제2 단부, 즉 접촉 요소로부터 멀리 떨어진 단부에 형성될 수 있다. 예를 들어, 단부 섹션은 단부 섹션이 미리 결정된 한계점에 도달 및/또는 초과할 때 검출 장치에 의해 검출되거나 검출가능할 수 있다.
특히, 접촉 요소로부터 멀리 대면하는 연결 요소의 단부 섹션은 경사를 포함할 수 있다. 예를 들어, 단부 섹션은 특히 연결 요소가 샤프트 형태인 경우 연결 요소를 종료하는 모따기(chamfer)일 수 있다.
일 실시예에서, 하우징은 실질적으로 원통형 형상을 가질 수 있다. 이 경우 하우징은 슬리브 형상인 것이 바람직하다. 연결 요소를 안내하는 하우징의 가이드는 슬리브형 하우징의 내주면의 일부에 의해 형성될 수 있다. 이와 달리, 슬라이딩 가이드는 예를 들어 압입된 추가 금속 또는 플라스틱 슬리브의 형태로 하우징의 내주면의 일부에 구비될 수 있다.
장치의 다른 실시예에서, 하우징은 플랜지를 포함할 수 있으며, 이를 통해 장치가 진공이 행해진 관련 인접 설비의 일부 또는 영역에 밀봉 방식으로 연결되거나 연결될 수 있다. 이 플랜지는 대략 원통 형상으로 형성된 하우징의 외주 둘레에 둘레를 따라 형성될 수 있다. 이 경우, 플랜지는 원형 링 형상을 가질 수 있으며 하우징과 동축일 수 있다.
하우징은 단일 편(one piece) 또는 복수의 편(multiple piece)으로 형성될 수 있다.
일 실시예에서, 본 발명에 따른 장치, 특히 하우징은 운송 보트의 단부 위치를 기계적으로 고정하기 위한 고정 정지부를 포함할 수 있다. 접촉 요소, 보다 구체적으로 접촉 요소의 상단은, 검출될 운송 보트의 방향으로 연결 요소의 초기 위치에서 보았을 때 미리 결정된 거리만큼 고정 정지부를 넘어 외측으로 연장될 수 있다. 또한, 접촉 요소, 보다 구체적으로 접촉 요소의 상단은, 연결 요소가 검출될 운송 보트의 방향에서 보는 바와 같은 검출 위치에 있을 때, 고정 정지부와 최대로 일렬로 또는 뒤에 있을 수 있다. 접촉 요소의 상단은 스프링 장착부에서 멀어지는 방향으로 가장 멀리 이격된 접촉 요소의 지점을 나타낼 수 있다. 회전 접촉 롤러의 경우 상단은 항상 스프링 장착부에서 멀어지는 방향으로 가장 멀리 떨어져 있는 롤러의 지점을 나타내는 것으로 이해해야 된다.
운송 보트의 단부 위치를 기계적으로 고정하기 위한 고정 정지부는, 예를 들어 연결 요소가 검출 위치에 도달했음에도 불구하고 검출 장치가 아무 것도 검출하지 못하고, 신호를 생성하지 못하며 및/또는 검출위치에 유지하는 경우와 같이 오작동이 발생한 경우, 바이어스에 대한 운송 보트의 이동이 고정 정지부에 의해 제한되도록 한다. 또한 운송 보트는 고정 정지부를 따라 슬라이딩할 수 있으며, 비록 검출가 제한적이지만 프로세스를 반드시 중단할 필요는 없다. 이는 중복 구현된 설비에서 특히 유리할 수 있다.
미리 결정된 거리는, 예를 들어 최대 1cm, 바람직하게는 최대 7mm, 바람직하게는 최대 5mm, 더욱 바람직하게는 최대 3mm일 수 있다. 운송 보트가 고정 정지부에 접촉하여 오작동이 발생하는 경우 운송 보트의 위치가 미미하게 변경될 뿐이므로 거리가 짧을수록 유리하다.
추가 실시예에서, 하우징은 단부면을 갖는 슬리브형 단부 섹션을 가질 수 있고, 상기 단부면은 고정 정지부를 형성한다. 따라서 고정 정지부는 고리형 단면적을 가질 수 있다. 예를 들어, 슬리브형 단부 섹션은 스프링 장착 및 검출 장치의 구성요소가 배열된 하우징의 나머지 부분보다 벽이 더 얇을 수 있다. 특히, 슬리브형 단부 섹션은 스프링 장착부로부터 멀어지는 방향으로 플랜지로부터 연장될 수 있다.
본 발명에 따른 장치의 일 실시예에서, 검출 장치는 비접촉 센서 및/또는 위치 스위치, 특히 기계적 리미트 스위치(limit switch)를 포함할 수 있다. 따라서, 검출 장치는 하나 이상의 동일하거나 상이한 센서를 포함할 수 있다. 센서(들)는 하우징에 배열된 연결 요소의 위치를 검출하기 위해 하우징에 통합되고 정렬될 수 있다.
예를 들어, 비접촉 센서는 유도 센서(inductive sensor)일 수 있다. 이것은 (예를 들어, 경사를 포함하는) 접촉 요소로부터 멀어지는 연결 요소의 단부 섹션이 유도 센서의 측정 필드로 이동할 때 검출 위치의 도달을 검출할 수 있다. 검출 위치는 유도 센서 또는 그 측정 필드의 배열과 그에 대한 연결 요소의 배열에 의해 정의될 수 있다.
기계적 리미트 스위치는 하우징에 통합되고 정렬될 수 있어 연결 요소를 이동함으로써 작동되고, 그에 따라 접촉 요소로부터 멀리 떨어진 연결 요소의 단부 섹션의 경사가 기계적 리미트 스위치와 접촉하게 한다. 기계적 리미트 스위치는 완전히 작동되지 않으며 경사가 충분히 멀리 변위될 때까지 검출 위치에 도달하는 것을 검출하는 것으로 이해애햐 한다. 예를 들어, 기계적 리미트 스위치는 완전히 작동되지 않고, 경사를 포함하는 연결 요소의 단부 부분이 기계적 리미트 스위치를 지나 변위될 때까지, 검출 위치의 도달을 검출하여 기계적 리미트 스위치가 단부 부분에 인접한 연결 요소의 부분과 접촉한다.
유도 센서와 기계식 리미트 스위치 모두 마모가 적으며, 진공 또는 장치에 스트레스를 주는 기타 환경 조건이 있는 공간에서 사용하기에 적합하지만, 여전히 장치의 안정적인 작동을 제공한다.
본 발명은 또한 운송 보트를 검출하고 안내하기 위한 시스템에 관한 것이다. 이 시스템은 전술한 유형의 적어도 하나의 장치와 이동 또는 회수 방향으로 이동되는 적어도 하나의 운송 보트를 포함한다. 적어도 하나의 운송 보트는 리세스을 포함 및/또는 돌출부를 포함하는 장치를 향하는 표면에서 평면일 수 있다. 시스템은 전술한 유형의 동일하거나 상이한 멀티플 장치를 포함할 수 있음을 이해해야 한다. 또한, 시스템은 복수의 운송 보트를 포함할 수 있다.
시스템의 다른 실시예에서, 적어도 하나의 장치는 적어도 하나의 운송 보트의 운동 방향에 직교하도록 배열될 수 있다. 예를 들어, 적어도 하나의 장치는 적어도 하나의 운송 보트의 하측과 접촉할 수 있다.
이와 달리 또는 추가적으로, 전술한 유형의 적어도 하나 이상의 장치는 적어도 하나의 운송 보트의 운동 방향으로 배열될 수 있다. 예를 들어, 적어도 하나의 장치는 이동 방향에서 보았을 때 운송 보트의 측면 또는 전면 단부면과 접촉하게 될 수 있다.
시스템의 일 실시예에서, 적어도 하나의 장치는 이동 방향에 영향을 미치지 않거나, 운송 보트의 이동 방향을 변경하도록, 예를 들어 90°로 편향시키도록 적어도 하나의 운송 보트의 이동 경로에 배열될 수 있다. 따라서 적어도 하나의 장치 또한 그 위치를 검출하는 동안 적어도 하나의 운송 보트를 안내하는 역할을 할 수 있다.
추가 실시예에서, 시스템은 컨트롤러를 포함할 수 있다. 검출 장치는 연결 요소에 의해 각각의 검출 위치에 도달하는 것을 검출하면 대응하는 신호를 생성하여 컨트롤러에 전송하도록 구성될 수 있다. 컨트롤러는 시스템에서 장치의 위치 또는 운송 보트의 기하학과 같은 시간적 파라미터 및/또는 저장된 파라미터와 관련하여 상기 신호를 설정하고, 그로부터 운송 보트의 위치를 정확하게 결정하도록 적응될 수 있다. 또한, 결정된 운송 보트의 위치 또는 검출 장치로부터 수신된 신호에 따라, 컨트롤러는 운송 보트가 이동하는 이동 속도를 조정할 수 있다.
본 발명은 또한 운송 보트를 검출하는 방법에 관한 것이다. 특히, 상기 방법은 전술한 유형의 장치 또는 시스템에 의해 수행될 수 있다. 이 방법은 다음 단계를 포함한다.
- 운송 보트에 의해 접촉 요소에 접촉하는 단계,
- 접촉 요소에 연결된 스프링 장착 연결 요소를 초기 위치에서 검출 위치까지의 바이어스에 대해 편향시키는 단계,
- 검출 장치를 사용하여 연결 요소에 의한 검출 위치의 도달을 검출하는 단계.
초기 위치에서 검출 위치까지의 바이어스에 대한, 접촉 요소에 연결된 스프링 장착 연결 요소의 편향은 운송 보트에 의한 접촉 요소의 접촉에 의해 발생하는 것으로 이해되어야 한다.
이 방법은 스프링 장착에 의해 야기된 바이어스로 인해 연결 요소(및 이에 연결된 접촉 요소)를 검출 위치에서 초기 위치로 다시 시프트하는 단계를 더 포함할 수 있다. 접촉 요소와 운송 보트 사이에 더 이상 접촉이 없으면 시프팅 백(shifting back)이 발생할 수 있다.
전술한 단계뿐만 아니라 전술한 설명에서 비롯된 다른 단계는 반복되고, 복수 회 수행될 수 있다.
비록 일부 양태 및 특징은 운송 보트를 검출하기 위한 장치에 대해서만 설명되었지만, 이러한 양태 및 특징은 운송 보트를 검출하기 위한 시스템 및/또는 방법에 필요한 수정을 가할 수 있으며, 그 반대의 경우도 마찬가지이다.
본 발명의 실시예는 첨부된 개략도를 참조하여 아래에서 더 상세히 설명된다. 이들 도면은 다음과 같다.
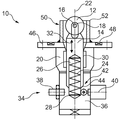
도 1은 본 발명의 실시예에 따르는 운송 보트 검출 장치의 측단면도이고,
도 2는 운송 보트에 대한 장치의 제1 배열을 도시한 본 발명에 따른 시스템의 실시예의 단순화된 측면도이며.
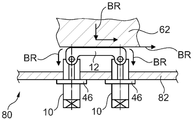
도 3은 운송 보트에 대한 장치의 제2 배열을 도시한 본 발명에 따른 시스템의 다른 실시예의 단순화된 평면도이고.
도 4는 운송 보트에 대한 장치의 제3 배열을 도시한 본 발명에 따른 시스템의 또 다른 실시예의 단순화된 평면도이다.
도 1은 본 발명의 실시예에 따르는 운송 보트 검출 장치의 측단면도이고,
도 2는 운송 보트에 대한 장치의 제1 배열을 도시한 본 발명에 따른 시스템의 실시예의 단순화된 측면도이며.
도 3은 운송 보트에 대한 장치의 제2 배열을 도시한 본 발명에 따른 시스템의 다른 실시예의 단순화된 평면도이고.
도 4는 운송 보트에 대한 장치의 제3 배열을 도시한 본 발명에 따른 시스템의 또 다른 실시예의 단순화된 평면도이다.
도면에서 동일한 참조 부호는 동일하거나 유사한 요소를 나타낸다.
도 1은 운송 보트(도 1에 도시되지 않음)와 접촉하기 위한 접촉 요소(12)를 갖는 장치(10)의 실시예를 도시한다. 도시된 예에서, 접촉 요소(12)는 접촉 롤러로서 형성된다. 접촉 요소(12)는 장치(10)의 연결 요소(14)의 상단에 회전 가능하게 부착되는 방식으로 장치에 연결된다. 이를 위해, 볼트(16)가 접촉 요소(12) 및 연결 요소(14)의 관련 보어를 통과한다. 이 볼트(16)는 장치(10)의 하우징(20)에 형성된 각각의 슬롯 구멍(18)의 양쪽에서 종료된다. 서로 마주하는 슬롯 구멍(도 1에는 하나의 슬롯 구멍(18)만 표시됨) 내에서의 볼트(16)의 양 단부의 배열 때문에, 접촉 요소(12) 및 이에 연결된 연결 요소(14)는 연결 요소(14)의 길이방향의 축(22)에 대해 하우징(20)에 회전 가능하게 고정된다.
연결 요소(14)는 샤프트의 형태이고 금속 헬리컬 스프링(24)에 의해 하우징(20)에 장착된 스프링이다. 이를 위해 헬리컬 스프링(24)은 연결 요소(14)의 리세스(26)의 섹션에 수용된다. 접촉 요소(12)로부터 멀어지는 쪽을 향한 연결 요소(14)의 단부로부터 시작하여, 리세스(26)는 접촉 요소(12)의 방향으로 위쪽으로 연장된다. 헬리컬 스프링(24)의 하단 섹션은 내부 하우징 정지부(28)에 대해 지지된다. 헬리컬 스프링(24)은 연결 요소(14) 및 이에 연결된 접촉 요소(12)를 도 1에 도시된 초기 위치로 바이어스시킨다. 이 초기 위치에서, 접촉 요소(12)는 어떠한 운송 보트와도 접촉하지 않는다.
연결 요소(14)는 하우징(20) 내부에서 원통형 하우징(20)과 실질적으로 동축으로 배열되고 이중 화살표(32)로 도시된 바와 같이 하우징(20)의 가이드(30)를 통해 길이방향의 축(22)을 따라 선형으로 변위 가능하게 안내된다. 볼트(16)의 단부가 지지된 슬롯 구멍(18)은, 회전 방지 장치에도 불구하고 이중 화살표(32) 방향으로 연결 요소(14) 및 접촉 요소(12)의 변위가 가능한지 확인한다. 도시된 예에서, 접촉 요소(12) 및 연결 요소(14)의 어셈블리의 이론상 최대 변위 가능성은 슬롯 구멍(18)의 상단 및 하단과 이들 단부에 대한 볼트(16)의 접합부에 의해 각각 결정된다.
접촉 요소(12) 및 연결 요소(14)는 상호 연결에 의해 공동으로 변위될 수 있다. 이 변위는 운송 보트(도 1에 도시되지 않음)와 접촉 요소(12)의 접촉이 초기 위치에서 검출 위치까지 헬리컬 스프링(24)에 의한 바이어스에 대해 연결 요소(14)의 편향을 유발하는 방식으로 수행된다.
도 1에서 더 볼 수 있는 바와 같이, 장치는 검출 위치에 도달하는 연결 요소(14)를 검출하도록 구성된 검출 장치(34)를 포함한다. 검출 장치(34)는 하우징(20)의 하부 영역에 배열된다. 도시된 실시예에서, 하우징(20)의 하부 영역은 슬리브 또는 포트(36)의 형태이다. 이 포트(36)는 가이드(30)를 포함하는 하우징(20)의 인접 영역에 고정 및 밀봉되어 연결된다.
도시된 실시예에서, 검출 장치(34)는 2개의 센서, 즉 비접촉 유도 센서(38) 및 기계적 리미트 스위치(40)를 포함한다. 다른 실시예에서, 검출 장치는 단지 하나의 센서 또는 동일한 유형의 2개의 센서를 포함할 수 있는 것으로 이해되어야 한다. 또한, 검출 장치는 2 이상의 센서를 포함할 수 있다.
유도 센서(38)는 이러한 방식으로 외부에서 포트(36)에 부착되고, 기계적 리미트 스위치(40)는, 연결 요소(14)가 미리 결정된 검출 위치에 도달할 때, 접촉 요소(12)로부터 멀어지는 쪽을 향하는 연결 요소(14)의 단부 섹션(42)이 2개의 센서(38, 40)에 의해 검출되는 방식으로, 포트(36)에 통합된다. 도시된 실시예에서, 접촉 요소로부터 떨어져 있는 연결 요소(14)의 단부 섹션(42)은 연결 요소(14)를 폐쇄하는 모따기(chamfer)의 형상을 갖는다. 따라서, 단부 섹션(42)은 도시된 경사부(44)를 포함한다.
도 1에서 알 수 있는 바와 같이, 유도 센서(38)는 단부 섹션(42) 또는 경사부(44)가 유도 센서(38)의 측정 필드로 이동할 때, 연결 요소(14)의 검출 위치의 도달을 검출할 수 있다. 또한, 기계적 리미트 스위치(40)는 연결 요소(14)를 변위시킴으로써 작동될 수 있고, 그에 따라 경사부(44)가 기계적 리미트 스위치(40)와 접촉하게 한다.
접촉 요소(12)를 통한 연결 요소(14)의 초기 위치로부터 검출 위치까지의 변위는 바이어스에 대해 그 위치로 움직이는 운송 보트에 의해 야기되기 때문에, 운송 보트의 위치가 검출될 수 있다. 예를 들어, 전체 시스템에서 장치(10)의 정확한 위치는 이러한 목적을 위해 알려질 수 있다. 이를 위해, 도 1에 도시된 장치(10)는 하우징(20)에 구비된 플랜지(46)를 통해 설비 벽에 연결되거나 연결될 수 있다. 보다 정확하게, 장치(10)는 나사로 고정되거나, 예를 들어 플랜지(46)를 통해 설비 벽에 나사로 고정될 수 있다. 설비와 장치(10) 사이의 긴밀한 연결을 보장하기 위해, 예를 들어 리세스에 배열된 O-링의 형태로 플랜지(46)에 원주 실(circumferential seal)(48)이 제공된다.
연결 요소(14)가 미리 결정된 검출 위치에 도달하는 것을 검출하면, 검출 장치(34)는 대응하는 신호를 생성하여 컨트롤러(미도시)로 전송할 수 있다. 컨트롤러는 이 신호를 전체 시스템에서 장치(10)의 위치 또는 운송 보트의 기하학적 구조와 같은 시간적 파라미터 및/또는 저장된 파라미터와 관련시키고, 그것을 이용하여 운송 보트의 위치를 정확하게 결정할 수 있다. 또한, 사전에 결정된 운송 보트의 위치에 따라, 또는 검출 장치(34)로부터 수신된 신호에 따라, 제어 시스템은 운송 보트가 이동하는 이동 속도를 변경할 수 있다.
전체 시스템 또는 오작동 발생시 수행되는 프로세스의 안전성을 증가시키기 위해, 도시된 장치(10)에는 운송 보트의 단부 위치를 기계적으로 고정하기 위한 고정 정지부(fixed stop)(52)가 구비된다. 이를 위해, 하우징(20)은 고정 정지부를 형성하는 단부면(52)을 갖는 슬리브 형상의 상단부 섹션(50)을 포함한다. 운송 보트의 단부 위치를 기계적으로 고정하기 위한 고정 정지부(52)는, 예를 들어 연결 요소(14)가 검출 위치에 도달 및/또는 연결 요소(14)가 유지되어 있음에도 불구하고 검출 장치(34)가 신호를 생성하지 않는 경우, 바이어스에 대한 운송 보트의 움직임이 고정 정지부(52)에 의해 제한될 수 있도록 해 준다. 더욱이, 운송 보트는 고정 정지부(52)를 따라 슬라이드할 수 있어, 비록 검출이 제한적이라 하더라도 프로세스가 반드시 중단될 필요는 없다.
도시된 실시예에서는 연결 요소(14)의 초기 위치(도 1)에서, 접촉 요소(12)의 상단부는 약 3mm의 미리 결정된 거리만큼 고정 정지부(52)를 넘어 바깥쪽으로 돌출한다. 연결 요소(14)의 검출 위치(미도시)에서, 접촉 요소(12)의 상단부는 고정 정지부(52)와 최대로 일직선 상에 있다.
도 2는 장치(10) 및 2개의 상호 연결된 운송 보트(62, 64)를 포함하는 시스템(60)의 실시예를 도시한다. 도 2에 도시된 배열에서, 장치(10)는 그 아래에 있는 운송 보트(62, 64)의 운동 방향(BR)에 수직으로 배열된다.
도시된 예에서, 운송 보트(62, 64)는 그 하측에 리세스(66)를 포함한다. 운송 보트(62, 64)의 하측이 장치(10)의 접촉 요소(12)와 접촉하는 한, 연결 요소(14)는 운송 보트(62, 64)에 의해 가해지는 힘으로 인해 검출 위치에 있게 된다. 접촉 요소(12)가 리세스(66)의 영역에 진입하자마자, 연결 요소(14)는 헬리컬 스프링에 의해 가해지는 바이어스로 인해 초기 위치로 이동한다. 검출 장치(34)가 더 이상 신호를 생성하지 않거나 검출 위치를 검출하지 않기 때문에, 검출 위치로부터 초기 위치로의 이러한 변화는 제어 시스템에 의해 검출된다. 이에 따라 두 운송 보트의 정확한 위치를 검출할 수 있다.
도 3은 2개의 장치(10)와 2개의 상호 연결된 운송 보트(62, 64)를 갖는 시스템(70)의 다른 실시예를 도시한다. 이 예에서, 2개의 장치(10)는 운송 보트(62, 64)의 운동 방향(BR)으로 배열된다. 그 결과, 2개의 장치(10) 또는 이들의 접촉 요소는 2개의 운송 보트(62, 64)의 전방의 전방 단부면과 접촉하게 된다. 이 접촉은 두 장치(10)의 각각의 연결 요소를 초기 위치에서 검출 위치로 변위시켜 운송 보트(62, 64)의 위치를 검출할 수 있다. 동시에, 장치(10)는 운송 보트(62, 64)를 안내하기 위한 역할, 보다 정확하게는 그들의 이동 방향(BR)을 90°만큼 편향시키기 위한 역할을 한다.
도 4는 2개의 장치(10) 및 운송 보트(62)를 포함하는 시스템(80)의 다른 실시예를 도시한다. 장치(10)는 각각의 하우징에 제공된 플랜지(46)를 통해 설비 벽(82)에 연결된다. 도 4의 예에서, 두 개의 장치(10)는 또한 운송 보트(62)의 운동 방향(BR)으로 배열된다. 그 결과, 2개의 장치(10) 또는 이들의 접촉 요소는 운송 보트(62)의 측면 단부면과 접촉하게 된다. 이 접촉은 두 장치(10)의 각각의 연결 요소를 초기 위치에서 검출 위치로 변위시켜 운송 보트의 위치를 검출할 수 있다.
동시에, 또한 이 실시예에서, 장치(10)는 운송 보트(62)를 안내하는 역할을 하며, 보다 정확하게는 그 이동 방향(BR)을 90°만큼 편향시킨다. 도 3에 따른 예와 대조적으로, 2개의 장치(10)는 접촉 요소(12)로서 공통 슬라이드 바를 포함한다. 슬라이드 바는 운송 보트(62)가 슬라이드 바의 2개의 실질적으로 직교하는 축을 따라 슬라이드 되도록 한다. 이것은 슬라이드 바와 접촉하는 운송 보트(62)가 두 개의 다른 방향(도 4에서, 이미지의 평면 밖, 이미지의 평면 안, 오른쪽, 또는 왼쪽)의 운동방향에 대해 90°편향되도록 한다.
또한, 전술한 실시예의 추가 조합, 예를 들어 시스템(60, 70 및/또는 80)의 상이한 조합이 가능한 것으로 이해되어야 한다.
10: 장치
12: 접촉 요소
14: 연결 요소 16: 볼트
18: 슬롯 구멍(slotted hole) 20: 하우징
22: 연결 요소의 길이방향의 축 24: 헬리컬 스프링
26: 연결 요소 리세스 28: 하우징 정지부
30: 가이드 32: 변위 방향
34: 검출장치 36: 포트
38: 유도 센서 40: 기계적 리미트 스위치
42: 연결 요소의 단부 섹션 44: 경사부
46: 플랜지 48: 시일(seal)
50: 하우징의 상단부 섹션 52: 고정 정지부
60: 제1 실시예의 시스템 62, 64: 운송 보트(transport boat)
66: 운송 보트 리세스 70: 제2 실시예의 시스템
80: 제3 실시예의 시스템 82: 설비 벽
BR: 이동 방향
14: 연결 요소 16: 볼트
18: 슬롯 구멍(slotted hole) 20: 하우징
22: 연결 요소의 길이방향의 축 24: 헬리컬 스프링
26: 연결 요소 리세스 28: 하우징 정지부
30: 가이드 32: 변위 방향
34: 검출장치 36: 포트
38: 유도 센서 40: 기계적 리미트 스위치
42: 연결 요소의 단부 섹션 44: 경사부
46: 플랜지 48: 시일(seal)
50: 하우징의 상단부 섹션 52: 고정 정지부
60: 제1 실시예의 시스템 62, 64: 운송 보트(transport boat)
66: 운송 보트 리세스 70: 제2 실시예의 시스템
80: 제3 실시예의 시스템 82: 설비 벽
BR: 이동 방향
Claims (15)
- 운송 보트(62, 64)를 검출하기 위한 장치(10)로서,
상기 운송 보트(62, 64)와 접촉하는 접촉 요소(12); 및
상기 장치(10)의 하우징(20)에 탄성적으로 장착되어 초기 위치로 바이어스되고, 상기 하우징(20)의 가이드(30)를 통해 선형으로 변위 가능하게 안내되는 연결 요소(14)를 포함하고,
상기 접촉 요소(12)는 스프링 장착 연결 요소(14)에 연결되고, 상기 운송 보트(62, 64)와 상기 접촉 요소(12)의 접촉이, 상기 초기 위치에서 검출 위치까지의 상기 바이어스에 대해 상기 연결 요소(14)의 편향을 유발하는 방식으로, 상기 연결 요소와 함께 변위 가능하며,
상기 장치(10)는 상기 연결 요소(14)에 의한 상기 검출 위치의 도달을 검출하는 검출 장치(34)를 포함하는 장치(10).
- 제1 항에 있어서,
상기 접촉 요소(12)는 상기 연결 요소(14)의 제1 단부에 회전 가능하게 장착된 슬라이드 바 또는 접촉 롤러인 장치(10).
- 제1 항 또는 제2 항에 있어서,
상기 접촉 요소(12) 및 상기 접촉 요소에 연결된 상기 연결 요소(14)는 상기 접촉 요소(12)에 의해 상기 하우징(20)에 회전가능하게 고정 배열되며,
상기 연결 요소(14) 및 상기 하우징(20)은 볼트(16)를 통해 상호 연결되고, 상기 볼트(16)는 상기 접촉 요소(12) 및 상기 연결 요소(14)의 보어(bore)를 통해 연장되며, 상기 하우징(20)의 각 관련된 슬롯 구멍(18) 내의 대향 단부에서 변위가능하게 수용되는 장치(10).
- 제1 항 내지 제3 항 중 어느 한 항에 있어서,
상기 연결 요소(14)는 샤프트인 장치(10).
- 제1항 내지 제4항 중 어느 한 항에 있어서,
상기 연결 요소(14)는 스프링 요소(24)의 적어도 일부가 수용되는 리세스(26)를 갖는 장치(10).
- 제1 항 내지 제5 항 중 어느 한 항에 있어서,
상기 연결 요소(14)는 상기 접촉 요소(12)로부터 멀어지는 방향을 향하는 단부 섹션(42)을 포함하고, 상기 단부 섹션은 상기 접촉 요소(14)가 상기 검출 위치에 도달할 때 상기 검출 장치(34)에 의해 검출되는 장치(10).
- 제6 항에 있어서,
상기 접촉 요소(12)로부터 멀어지는 방향을 향하는 상기 연결 요소(14)의 단부 섹션(42)은 경사부(44)를 포함하는 장치(10).
- 제1 항 내지 제7 항 중 어느 한 항에 있어서,
상기 하우징(20)은 실질적으로 원통형 형상을 갖는 장치(10).
- 제1 항 내지 제8 항 중 어느 한 항에 있어서,
상기 하우징(20)은 플랜지(46)를 포함하고, 상기 플랜지(46)에 의해 상기 장치(10)가 관련 설비의 진공 대상 부분에 밀봉 방식으로 연결 가능하거나 연결되는 장치(10).
- 제1 항 내지 제9 항 중 어느 한 항에 있어서,
상기 운송 보트(62, 64)의 단부 위치를 기계적으로 고정하는 고정 정지부(52)를 더 포함하고,
상기 접촉 요소(12)는 감지될 상기 운송 보트(62, 64) 방향에서 상기 연결 요소(14)의 초기 위치에 있으며,
상기 접촉 요소(12)는 미리 결정된 거리만큼 상기 고정 정지부(52)를 넘어 외측으로 돌출하고,
상기 접촉 요소(12)는, 상기 연결 요소(14)가 검출될 상기 운송 보트(62, 64)의 방향에서 보아 상기 검출 위치에 있을 때, 상기 고정 정지부(52)와 최대로 일직선이 되는 장치(10).
- 제10 항에 있어서,
상기 미리 결정된 거리는 최대 1 cm, 바람직하게는 최대 7 mm, 바람직하게는 최대 5 mm, 보다 바람직하게는 최대 3 mm인 장치(10).
- 제10 항 또는 제11 항에 있어서,
상기 하우징(20)은 상기 고정 정지부(52)를 형성하는 단부면을 갖는 슬리브형 단부 섹션(50)을 포함하는 장치(10).
- 제1항 내지 제12항 중 어느 한 항에 있어서,
상기 검출 장치(34)는 비접촉 센서(38) 및/또는 기계적 제한 스위치(40)를 포함하는 장치(10).
- 제1 항 내지 제13 항 중 어느 한 항에 따른 적어도 하나의 장치(10), 및 적어도 하나의 운송 보트(62, 64)를 포함하며, 상기 운송 보트(62, 64)를 검출하고 안내하기 위한 시스템(60, 70, 80).
- 운송 보트(62, 64)를 검출하는 방법으로서,
상기 운송 보트(62, 64)를 통해 접촉 요소(12)와 접촉하는 단계;
초기 위치에서 검출 위치까지의 바이어스에 대해 상기 접촉 요소(12)에 연결된 스프링 장착 연결 요소(14)를 편향시키는 단계; 및
검출 장치(34)를 통해 상기 연결 요소(14)에 의한 검출 위치의 도달을 검출하는 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102019102590.7A DE102019102590A1 (de) | 2019-02-01 | 2019-02-01 | Vorrichtung, System und Verfahren zum Erkennen von Transportbooten |
| DE102019102590.7 | 2019-02-01 | ||
| PCT/EP2020/051381 WO2020156882A1 (de) | 2019-02-01 | 2020-01-21 | Vorrichtung, system und verfahren zum erkennen von transportbooten |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20210120007A true KR20210120007A (ko) | 2021-10-06 |
| KR102786706B1 KR102786706B1 (ko) | 2025-03-27 |
Family
ID=69185609
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020217025043A Active KR102786706B1 (ko) | 2019-02-01 | 2020-01-21 | 운송 보트를 검출하는 장치, 시스템 및 방법 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20220084699A1 (ko) |
| EP (1) | EP3895182B1 (ko) |
| KR (1) | KR102786706B1 (ko) |
| CN (1) | CN113474847B (ko) |
| DE (1) | DE102019102590A1 (ko) |
| WO (1) | WO2020156882A1 (ko) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1450384A1 (fr) * | 2003-02-20 | 2004-08-25 | Peugeot Citroen Automobiles S.A. | Dispositif de détection et véhicule correspondant |
| US20150096870A1 (en) * | 2013-10-04 | 2015-04-09 | Schneider Electric Industries Sas | Limit switch |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE961263C (de) * | 1952-02-10 | 1957-04-04 | Deutsche Edelstahlwerke Ag | Vorrichtung an kontinuierlich arbeitenden Waermeoefen zur Anzeige der Lage des auszufahrenden Gutes |
| US3590177A (en) * | 1969-06-13 | 1971-06-29 | Buchanan Electrical Prod Corp | Limit switch |
| GB1349642A (en) * | 1971-12-11 | 1974-04-10 | Plessey Co Ltd | Telephone instruments |
| JPH0718660B2 (ja) * | 1988-12-29 | 1995-03-06 | 株式会社クボタ | 焼結皿挟持装置 |
| KR101076737B1 (ko) * | 2005-05-03 | 2011-10-26 | 주식회사 월드전자기술 | 진공압력스위치 |
| FR2892556B1 (fr) * | 2005-10-24 | 2008-01-25 | Cogema | Dispositif de remplissage de nacelle avec des pastilles de combustible nucleaire et procede de remplissage mettant en oeuvre un tel dispositif |
| FR2896034A1 (fr) * | 2006-01-10 | 2007-07-13 | Cogema | Dispositif de separation de sabots de frittage |
| DE202007002012U1 (de) * | 2007-02-12 | 2007-06-06 | SHAN HO ELECTRIC CO., LTD., Lu Chou City | Kontaktloser Endschalter |
| DE102007013916B4 (de) * | 2007-03-20 | 2011-06-22 | Feinmess Suhl GmbH, 98527 | Konturenmessvorrichtung |
| CN207019473U (zh) * | 2017-06-29 | 2018-02-16 | 北京天仁道和新材料有限公司 | 一种导向机构、推送装置及烧结设备 |
| CN108302938A (zh) * | 2017-12-28 | 2018-07-20 | 中核北方核燃料元件有限公司 | 一种uo2烧结芯块自动上料装置 |
-
2019
- 2019-02-01 DE DE102019102590.7A patent/DE102019102590A1/de not_active Withdrawn
-
2020
- 2020-01-21 US US17/425,317 patent/US20220084699A1/en active Pending
- 2020-01-21 EP EP20701457.2A patent/EP3895182B1/de active Active
- 2020-01-21 KR KR1020217025043A patent/KR102786706B1/ko active Active
- 2020-01-21 CN CN202080011776.7A patent/CN113474847B/zh active Active
- 2020-01-21 WO PCT/EP2020/051381 patent/WO2020156882A1/de not_active Ceased
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1450384A1 (fr) * | 2003-02-20 | 2004-08-25 | Peugeot Citroen Automobiles S.A. | Dispositif de détection et véhicule correspondant |
| US20150096870A1 (en) * | 2013-10-04 | 2015-04-09 | Schneider Electric Industries Sas | Limit switch |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220084699A1 (en) | 2022-03-17 |
| EP3895182B1 (de) | 2024-05-01 |
| EP3895182A1 (de) | 2021-10-20 |
| WO2020156882A1 (de) | 2020-08-06 |
| DE102019102590A1 (de) | 2020-08-06 |
| KR102786706B1 (ko) | 2025-03-27 |
| CN113474847B (zh) | 2025-04-18 |
| CN113474847A (zh) | 2021-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| FI4146437T3 (fi) | Salpajärjestelmä väänninkoneeseen | |
| US6960974B2 (en) | Magnetoresistive smart switch | |
| US11167936B2 (en) | Conveyance system for conveying object carriers | |
| CN104380050A (zh) | 用于变速器的齿轮接合机构以及相关方法 | |
| WO2014145629A1 (en) | Connector system with connection sensor | |
| CN102901424A (zh) | 测头 | |
| CN210084863U (zh) | 一种agv叉车 | |
| KR20210120007A (ko) | 운송 보트를 검출하는 장치, 시스템 및 방법 | |
| EP4034842B1 (en) | Displacement measuring arrangement with a hall sensor and a magnet | |
| US11045895B2 (en) | Position sensing a location pin in a welding electrode | |
| US4636699A (en) | Industrial robot control system | |
| CN104595682B (zh) | 工作台防撞装置及具有它的压力机 | |
| CN106956906B (zh) | 具有放大机构的智能跑偏开关及其监测方法 | |
| CN108151770B (zh) | 封装磁体位置开关 | |
| CN107830232B (zh) | 阀附接件、阀和用于控制阀的方法 | |
| CN111056285A (zh) | 工件输送装置 | |
| US12092208B2 (en) | Actuating device for an automated manual transmission | |
| US9789562B1 (en) | Position sensing a location pin in a welding electrode | |
| KR102239666B1 (ko) | 워크피스 위치 결정 장치 | |
| JP3548604B2 (ja) | スタッドボルトの方向判別方法及び方向判別装置 | |
| CN117795301A (zh) | 流体压力检测器 | |
| US20260016053A1 (en) | Electromagnetically shiftable positive engagement clutch and method for position determination | |
| KR100863056B1 (ko) | 프레스판넬 이송용 핑거툴 장치 | |
| US20250341238A1 (en) | Electromagnetically shiftable positive engagement clutch | |
| JP7422975B2 (ja) | プロジェクションナットの供給ロッド装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20210806 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20240822 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20250223 |
|
| PG1601 | Publication of registration |