KR20220080363A - 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어 - Google Patents
주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어 Download PDFInfo
- Publication number
- KR20220080363A KR20220080363A KR1020200169387A KR20200169387A KR20220080363A KR 20220080363 A KR20220080363 A KR 20220080363A KR 1020200169387 A KR1020200169387 A KR 1020200169387A KR 20200169387 A KR20200169387 A KR 20200169387A KR 20220080363 A KR20220080363 A KR 20220080363A
- Authority
- KR
- South Korea
- Prior art keywords
- electric wheelchair
- electric
- mecanum wheel
- mecanum
- frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 239000000725 suspension Substances 0.000 claims abstract description 11
- 230000008859 change Effects 0.000 claims abstract description 10
- 230000008878 coupling Effects 0.000 claims description 23
- 238000010168 coupling process Methods 0.000 claims description 23
- 238000005859 coupling reaction Methods 0.000 claims description 23
- 238000000034 method Methods 0.000 claims description 5
- 238000001514 detection method Methods 0.000 claims description 3
- 230000009471 action Effects 0.000 claims description 2
- 230000000149 penetrating effect Effects 0.000 claims 2
- 230000000474 nursing effect Effects 0.000 abstract description 5
- 239000013598 vector Substances 0.000 description 18
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011065 in-situ storage Methods 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/04—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/04—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven
- A61G5/041—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven having a specific drive-type
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/04—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven
- A61G5/048—Power-assistance activated by pushing on hand rim or on handlebar
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
- A61G5/1005—Wheelchairs having brakes
- A61G5/1035—Wheelchairs having brakes manipulated by wheelchair user
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
- A61G5/12—Rests specially adapted therefor, e.g. for the head or the feet
- A61G5/122—Rests specially adapted therefor, e.g. for the head or the feet for the back
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
- A61G5/12—Rests specially adapted therefor, e.g. for the head or the feet
- A61G5/124—Rests specially adapted therefor, e.g. for the head or the feet for pelvis or buttocks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
- A61G5/12—Rests specially adapted therefor, e.g. for the head or the feet
- A61G5/125—Rests specially adapted therefor, e.g. for the head or the feet for arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B19/00—Wheels not otherwise provided for or having characteristics specified in one of the subgroups of this group
- B60B19/12—Roller-type wheels
- B60B19/125—Roller-type wheels with helical projections on radial outer surface translating rotation of wheel into movement along the direction of the wheel axle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2203/00—General characteristics of devices
- A61G2203/10—General characteristics of devices characterised by specific control means, e.g. for adjustment or steering
- A61G2203/14—Joysticks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2203/00—General characteristics of devices
- A61G2203/30—General characteristics of devices characterised by sensor means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2203/00—General characteristics of devices
- A61G2203/70—General characteristics of devices with special adaptations, e.g. for safety or comfort
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
본 명세서의 일 실시예에 따른 주행성을 향상시킨 메카넘 휠이 구비된 전동휠체어는
탑승자가 착석하는 시트; 상기 시트 좌우측에 형성되고 탑승자 팔을 올려놓는 아암레스트; 탑승자의 등을 지지하는 등받이; 상기 시트, 등받이 및 배터리가 탑재되는 프레임; 상기 프레임에 회동가능하게 장착되고 탑승자 발이 거치되는 한 쌍의 발 받침대; 상기 프레임에 일단이 연결되고 상기 메카넘 휠을 지지하는 휠 지지대에 타단이 연결되는 복수개의 서스펜션;을 구비하는 메카넘 휠이 구비된 전동 휠체어에 있어서:
상기 프레임에 장착되고, 상기 배터리로부터 인가되는 전원에 의해 구동되는 복수개의 전동모터;
상기 전동모터의 회전축에 각각 연결되는 허브 외측면에 원주방향으로 복수개 장착되고, 대칭되는 롤러유닛으로 이루어지며 롤러회전축에 회전자재토록 장착되는 롤러가 임의각도로 경사지게 형성되는 메카넘 휠;
상기 전동모터 구동을 브레이크버튼을 터치 후 조이스틱 조작으로 각각 개별적으로 제어하여 전후방향 직진주행, 좌우방향 이동, 대각선방향 이동 또는 제자리에서 정역방향 전환을 제어하기 위한 조작부;
상기 전동모터에 각각 연결되고, 상기 조작부에 의해 전동 휠체어의 임의방향으로 이동 또는 방향전환하는 도중에 상기 메카넘 휠을 제동시키기 위한 제동장치;를 구비하는 것을 특징으로 하는 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어를 제공한다.
Description
도 2는 도 1에 도시된 전동 휠체어에서, 아암레스트 승강됨을 나타내는 도면,
도 3은 도 1에 도시된 전동 휠체어에서, 아암레스트 후방으로 회동됨을 나타내는 도면,
도 4는 도 1에 도시된 전동 휠체어에서, 등받이 절첩됨을 나타내는 도면,
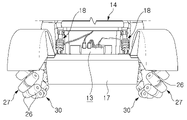
도 5는 도 1에 도시된 전동 휠체어에서, 서스펜션 및 후방 메카넘 휠의 장착됨을 나타내는 도면,
도 6은 도 1에 도시된 전동 휠체어에서, 발 받침대의 회동됨을 나타내는 도면,
도 7은 도 6에 도시된 발 받침대의 로킹 및 언로킹을 나타내는 도면,
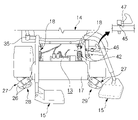
도 8은 도 1에 도시된 전동 휠체어의 도면대용 평면사진,
도 9는 도 1에 도시된 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어의 변형예를 나타나는 도면대용 평면사진,
도 10은 도 1에 도시된 전동 휠체어에서, 메카넘 휠의 롤러 도면,
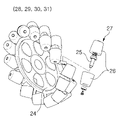
도 11은 도 1에 도시된 전동 휠체어에서, 메카넘 휠의 도면,
도 12는 도 9에 도시된 전동 휠체어에서, 메카넘 휠의 도면,
도 13은 도 1에 도시된 전동 휠체어에서, 주행 방향을 나타내는 개략적인 평면도이다.
11; 아암레스트(arm rest)
12; 등받이
13; 배터리(battery)
14; 프레임(frame)
15; 발 받침대
16; 측판(side plate)
17; 휠지지대
18; 서스펜션(suspension)
19; 제1 전동모터
20; 제2 전동모터
21; 제3 전동모터
22; 제4 전동모터
23; 회전축
24; 허브(hub)
25; 롤러회전축
26; 롤러유닛(roller unit)
27; 롤러(roller)
28; 제1 메카넘 휠(mecanum wheel)
29; 제2 메카넘 휠
30; 제3 메카넘 휠
31; 제4 메카넘 휠
32; 조작부
33; 브레이크 버튼(brake button)
34; 조이스틱(joy stick)
36; 회동부재
37; 힌지핀(hinge pin)
38; 로킹홀
39; 스토퍼(stopper)
40; 조작레버
41; 결합홀
42; 서포터(supporter)
43; 수평간
44; 로킹핀
45; 캠면
46; 핸들(handle)
47; 캠(cam)
48; 가이드면
49; 연결구
A; 전동 휠체어
B; 제동장치
Claims (9)
- 탑승자가 착석하는 시트; 상기 시트 좌우측에 형성되고 탑승자 팔을 올려놓는 아암레스트; 탑승자의 등을 지지하는 등받이; 상기 시트, 등받이 및 배터리가 탑재되는 프레임; 상기 프레임에 회동가능하게 장착되고 탑승자 발이 거치되는 한 쌍의 발 받침대; 상기 프레임에 일단이 연결되고 상기 메카넘 휠을 지지하는 휠 지지대에 타단이 연결되는 복수개의 서스펜션;을 구비하는 메카넘 휠이 구비된 전동 휠체어에 있어서:
상기 프레임에 장착되고, 상기 배터리로부터 인가되는 전원에 의해 구동되는 복수개의 전동모터;
상기 전동모터의 회전축에 각각 연결되는 허브 외측면에 원주방향으로 복수개 장착되고, 대칭되는 롤러유닛으로 이루어지며 롤러회전축에 회전자재토록 장착되는 롤러가 임의각도로 경사지게 형성되는 메카넘 휠;
상기 전동모터 구동을 브레이크버튼을 터치 후 조이스틱 조작으로 각각 개별적으로 제어하여 전후방향 직진주행, 좌우방향 이동, 대각선방향 이동 또는 제자리에서 정역방향 전환을 제어하기 위한 조작부;
상기 전동모터에 각각 연결되고, 상기 조작부에 의해 전동 휠체어의 임의방향으로 이동 또는 방향전환하는 도중에 상기 메카넘 휠을 제동시키기 위한 제동장치;를 구비하는 것을 특징으로 하는 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어. - 제1항에 있어서,
상기 프레임 일측에 장착되고, 전동 휠체어가 임의방향으로 이동하거나, 또는 방향 전환시 주변의 장애물을 검출하여 검출신호를 제어부에 전송함에 따라 전동 휠체어의 이동을 제한하여 상기 장애물로부터 탑승자를 보호하기 위한 근접센서;를 더 구비하는 것을 특징으로 하는 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어. - 제1항에 있어서,
상기 메카넘 휠은 이동 및 방향전환시 접지면적을 증대시킬 수 있도록 전,후,좌,우 전동모터의 회전축에 2열로 각각 장착되는 것을 특징으로 하는 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어. - 제1항에 있어서,
상기 아암레스트가 장착되는 측판;
상기 프레임 뒷쪽에 일단이 회동가능하게 힌지고정되고, 상기 측판 외측면에 중간측이 고정되며, 상기 프레임 앞쪽에 형성되는 수납구에 타단이 착탈가능하게 수용되는 봉 형태의 회동부재;를 구비하여,
상기 아암레스트를 힌지핀을 중심축으로 전동 휠체어 후방쪽으로 회동시킬 수 있도록 한 것을 특징으로 하는 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어. - 제4항에 있어서,
상기 수납구 일측에 전후 방향으로 관통형성되는 로킹홀;
상기 로킹홀에 로킹 또는 언로킹되도록 상기 회동부재의 타단에 반경방향으로 시프팅가능하게 형성되는 스토퍼;
상기 회동부재쪽으로 조작레버를 가압시 상기 스토퍼를 상기 로킹홀로부터 이탈시키고, 상기 조작레버로부터 외력 제거시 상기 로킹홀에 상기 스토퍼가 결합된 초기상태를 탄성바이어스하는 탄성부재;를 구비하여,
상기 회동부재 타단이 상기 수납구로부터 임의적으로 로킹해제됨을 방지하는 것을 특징으로 하는 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어. - 제1항에 있어서,
상기 프레임 앞쪽에 형성되고, 좌우방향으로 스윙되는 상기 발 받침대를 로킹시키는 결합홀이 형성되는 서포터;
상기 결합홀에 로킹 또는 언로킹되도록 상기 발 받침대의 수평간 임의위치에 승강가능하게 형성되는 로킹핀;
상기 로킹핀 상단에 형성되는 핸들;을 구비하고, 상기 핸들의 정역방향으로 회전시 상기 수평간 상면에 돌출형성된 캠면과, 이와 대응되게 상기 핸들 저면에 형성된 캠의 상호 캠작용으로 인해 상기 로킹핀을 상기 결합홀에 로킹 또는 언로킹시키는 것을 특징으로 하는 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어. - 제6항에 있어서,
상기 서포터는
상기 결합홀을 향하여 좌측 및 우측에 경사지게 형성되고, 상기 핸들 회전에 따라 상기 로킹핀이 상기 결합홀에 결합시 상기 로킹핀 하단이 슬라이딩이동되어 상기 결합홀에 결합되도록 안내하는 가이드면;을 구비하는 것을 특징으로 하는 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어. - 제1항에 있어서,
상기 서스펜션은
정역 방향으로 방향전환시 상기 회전축에 발생되는 비틀림응력(torsional stress)을 줄일 수 있도록 일단이 상기 프레임 임의위치에 고정되고 타단이 상기 서스펜션 임의위치에 고정되는 토션바(torsion bar);를 더 구비하는 것을 특징으로 하는 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어. - 제3항에 있어서,
상기 회전축에 상기 제1 내지 제4 메카넘 휠을 2열로 장착시킨 전동 휠체어를 정역방향으로 방향전환시킬 경우 상기 회전축에 발생되는 비틀림응력을 줄일 수 있도록,
상기 회전축에 장착되는 한 쌍의 허브 대향면에 형성되는 보스에 환형으로 형성되는 결합홈과 상기 결합홈과 대응되는 돌출부를 형성하여 요철결합하고, 상기 보스를 관통하는 관통공에 결합되는 체결부재에 의해 상기 허브를 체결하되, 상기 허브의 대향면에 설치되는 탄성부재의 탄성력에 의해 상기 허브를 임의거리만큼 이격시키며 상기 회전축에 발생되는 비틀림응력을 감소시킬 수 있도록 한 것을 특징으로 하는 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200169387A KR20220080363A (ko) | 2020-12-07 | 2020-12-07 | 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200169387A KR20220080363A (ko) | 2020-12-07 | 2020-12-07 | 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220080363A true KR20220080363A (ko) | 2022-06-14 |
Family
ID=81980180
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200169387A Ceased KR20220080363A (ko) | 2020-12-07 | 2020-12-07 | 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20220080363A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102457836B1 (ko) * | 2022-08-12 | 2022-10-26 | 쿠가 주식회사 | 전동식 모빌리티 |
| KR20240130162A (ko) | 2023-02-17 | 2024-08-29 | 동의대학교 산학협력단 | 장애물 감지기능을 구비한 메카넘휠 전동 휠체어 및 그 제어방법 |
-
2020
- 2020-12-07 KR KR1020200169387A patent/KR20220080363A/ko not_active Ceased
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102457836B1 (ko) * | 2022-08-12 | 2022-10-26 | 쿠가 주식회사 | 전동식 모빌리티 |
| KR20240130162A (ko) | 2023-02-17 | 2024-08-29 | 동의대학교 산학협력단 | 장애물 감지기능을 구비한 메카넘휠 전동 휠체어 및 그 제어방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8118321B2 (en) | Vehicle with central wheel drive, in particular a wheelchair or stand-up wheelchair | |
| JP6687234B2 (ja) | 移動装置 | |
| US7971893B1 (en) | Wheelchair | |
| EP1875888B1 (en) | Differential steering type motorized vehicle | |
| JPH0651473B2 (ja) | 階段昇降装置 | |
| JP2012030735A (ja) | 全方向車輪および移動装置 | |
| KR20220080363A (ko) | 주행성을 향상시킨 메카넘 휠이 구비된 전동 휠체어 | |
| JP6740190B2 (ja) | 移動装置 | |
| JP3244706B2 (ja) | モータ式車椅子 | |
| JP2019025252A5 (ko) | ||
| JP7211219B2 (ja) | 移動体 | |
| KR101514015B1 (ko) | 전동식 회전 휠체어 | |
| JP3231518U (ja) | 小型電動車両用操作装置および小型電動車両 | |
| WO2024089598A1 (en) | Omnidirectional mobility device for people with reduced motorial function | |
| JP2014073317A (ja) | 電動モビリティ | |
| JP4446484B2 (ja) | 電動車椅子 | |
| JP2014073316A (ja) | 電動モビリティ | |
| JP2001104390A (ja) | 車椅子及び車椅子用アタッチメント及び段差走行用車輪 | |
| JP2957569B1 (ja) | 足駆動ユニット付き車いす装置 | |
| JPH0671884B2 (ja) | 自走台車 | |
| JP2002035041A (ja) | 車椅子 | |
| JP2005323692A (ja) | 電動車椅子 | |
| JP2019034148A (ja) | 電動車椅子 | |
| JP3466528B2 (ja) | 車両用シート装置 | |
| JP2025145102A (ja) | 四輪駆動式車両の前輪制御機構、及び四輪駆動式車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20201207 |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20220926 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20230109 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20220926 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |