KR20220106576A - 색상과 깊이 영상을 이용한 신장 추정 시스템 및 그 추정방법 - Google Patents
색상과 깊이 영상을 이용한 신장 추정 시스템 및 그 추정방법 Download PDFInfo
- Publication number
- KR20220106576A KR20220106576A KR1020210009656A KR20210009656A KR20220106576A KR 20220106576 A KR20220106576 A KR 20220106576A KR 1020210009656 A KR1020210009656 A KR 1020210009656A KR 20210009656 A KR20210009656 A KR 20210009656A KR 20220106576 A KR20220106576 A KR 20220106576A
- Authority
- KR
- South Korea
- Prior art keywords
- height
- image
- depth image
- pixel
- body region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1079—Measuring physical dimensions, e.g. size of the entire body or parts thereof using optical or photographic means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0033—Features or image-related aspects of imaging apparatus, e.g. for MRI, optical tomography or impedance tomography apparatus; Arrangements of imaging apparatus in a room
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1075—Measuring physical dimensions, e.g. size of the entire body or parts thereof for measuring dimensions by non-invasive methods, e.g. for determining thickness of tissue layer
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/90—Determination of colour characteristics
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Geometry (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Abstract
Description


도 2는 본 발명에 따른 색상과 깊이 영상을 이용한 신장 추정 시스템의 제1 검출부를 나타낸 도면이다.
도 3은 상기 도 2의 제1 검출부에 의해 사람의 신체 영역이 추출된 모습을 나타낸 도면이다.
도 4는 본 발명에 다른 색상과 깊이 영상을 이용한 신장 추정 시스템의 제2 검출부를 나타낸 도면이다.
도 5는 상기 도 4의 제2 검출부에 의해 깊이 영상에서의 사람의 신체 모습을 나타낸 도면이다.
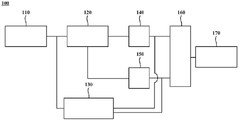
도 6은 본 발명의 색상과 깊이 영상을 이용한 신장 추정 시스템의 신장 추정 장치를 나타낸 블럭도이다.
도 7은 본 발명의 신장 추정 시스템을 이용하여 신장을 추정하는 과정을 설명하기 위한 도면이다.
도 8은 본 발명의 신장 추정 시스템을 이용하여 신장을 추정할 때 정수리 영역의 위치를 보정하는 과정을 설명하기 위한 도면이다.
도 9는 도 8의 보정이 적용된 경우와 적용되지 않은 경우에 대한 신장의 추정 결과를 비교한 도면이다.
도 10은 본 발명의 신장 추정 시스템에서 카메라와 사람의 거리에 따른 신장 추정 결과를 나타낸 도면이다.
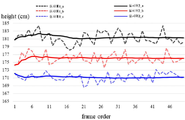
도 11은 본 발명의 신장 추정 시스템에서 사람의 움직임에 따라 신장 추정 결과를 나타낸 도면이다.
도 12는 본 발명의 색상과 깊이 영상을 이용한 신장 추정방법을 나타낸 도면이다.
도 13은 본 발명의 다른 실시예에 따른 신장 추정방법을 나타낸 도면이다.







110: 영상 촬영부
120: 모드 선택부
130: 저장부
140: 제1 검출부
150: 제2 검출부
160: 신장 추정 장치
160a: 3차원 변환부
160b: 신장 계산부
160c: 신장 추정부
170: 표시부
Claims (10)
- 컬러 영상과 깊이 영상을 제공하는 영상 촬영부;
상기 영상 촬영부로부터 제공되는 컬러 영상과 깊이 영상을 선택하는 모드 선택부;
상기 모드 선택부에 의해 제1 모드가 선택된 경우 컬러 영상으로부터 사람의 신체 영역을 검출하는 제1 검출부;
상기 모드 선택부에 의해 제2 모드가 선택된 경우 깊이 영상으로부터 사람의 신체 영역을 검출하는 제2 검출부;
상기 제1 검출부 또는 제2 검출부로부터 검출된 신체 영역이 포함된 영상으로부터 사람의 신장을 추정하는 신장 추정 장치를 포함하고,
상기 신장 추정 장치는,
상기 제2 검출부로부터 제공되는 검출된 신체 영역으로부터 사람의 머리 영역과 발끝 영역에 각각 대응되는 정수리 화소와 발끝 화소를 선택하고, 선택된 화소들에 대해 3차원 좌표점들로 변환하는 3차원 변환부;
상기 3차원 변환부에서 제공된 3차원 좌표점들에 기초하여 상기 선택된 화소와 이와 이웃하는 화소와의 유사도 검사를 진행하고, 유사하다고 판단되는 경우 상기 선택된 화소들을 이용하여 신장을 계산하는 신장 계산부; 및
상기 신장 계산부에서 계산된 신장을 기초로 깊이 영상 내의 사람의 신장을 추정하는 신장 추정부를 포함하는
신장 추정 시스템. - 제1항에 있어서,
상기 신장 추정 장치의 신장 계산부는,
상기 신장 추정부에서 추정한 신장에 기초하여 상기 깊이 영상을 구성하는 복수의 깊이 이미지 프레임들 중 n번째 깊이 이미지 프레임에 대하여 n개의 추정된 신장들에 대한 누적 평균값을 계산한 후, 계산된 누적 평균값으로 n번째 깊이 이미지 프레임에 대한 추정된 신장을 보정하는
신장 추정 시스템. - 영상 촬영부;
상기 영상 촬영부로부터 제공되는 컬러 영상과 깊이 영상을 선택하는 모드 선택부;
상기 모드 선택부에 의해 제1 모드가 선택된 경우 컬러 영상으로부터 사람의 신체 영역을 검출하는 제1 검출부;
상기 모드 선택부에 의해 제2 모드가 선택된 경우 깊이 영상으로부터 사람의 신체 영역을 검출하는 제2 검출부; 및
상기 제1 검출부 또는 제2 검출부로부터 검출된 신체 영역이 포함된 영상으로부터 사람의 신장을 추정하는 신장 추정 장치를 포함하는 신장 추정 시스템을 이용한 신장 추정방법에 있어서,
컬러 영상과 깊이 영상을 제공받는 단계;
신장 추정을 위해 사용할 영상이 컬러 영상인 경우에는 제1모드, 깊이 영상인 경우에는 제2모드로 구분되고, 제1 및 제2 모드 중 어느 하나의 모드를 선택하는 단계;
상기 제2 모드를 선택한 경우, 상기 깊이 영상으로부터 신체 영역을 검출하는 단계;
상기 검출된 신체 영역의 정수리 화소와 발끝 화소를 검출하는 단계;
상기 검출된 정수리 화소와 발끝 화소를 3차원 좌표점으로 변환하는 단계;
상기 변환된 3차원 좌표점들에 대해 화소 유사도를 검사하는 단계;
상기 변환된 3차원 좌표점들에 대해 화소 유사도가 있는 것으로 판단된 경우,
상기 변환된 3차원 좌표점들을 이용하여 두 좌표점 사이의 길이를 계산하는 단계; 및
상기 계산된 길이를 깊이 영상이 사람의 신장으로 추정하는 단계를 포함하는
신장 추정방법. - 제3항에 있어서,
상기 깊이 영상으로부터 신체 영역을 검출하는 단계는,
상기 깊이 영상을 구성하는 깊이 이미지의 화소들에 대해 수학식(1)에 따라 이진화 변환을 진행하여 이진화 이미지를 생성하는 단계를 포함하는
..............수학식(1)
(여기서 db(x,y)와 d(x,y)는 각각 배경 깊이 이미지와 깊이 영상의 이미지의 화소 위치에서의 깊이 값이고, Tb는 이진화 임계값이다.)
신장 추정방법. - 제4항에 있어서,
상기 검출된 신체 영역의 정수리 화소와 발끝 화소를 검출하는 단계는,
상기 이진화 이미지에서 검출된 신체 영역에 대해 사람의 머리 영역과 대응되는 정수리 화소와 사람의 발 영역과 대응되는 발끝 화소를 검출하는
신장 추정방법. - 제4항에 있어서,
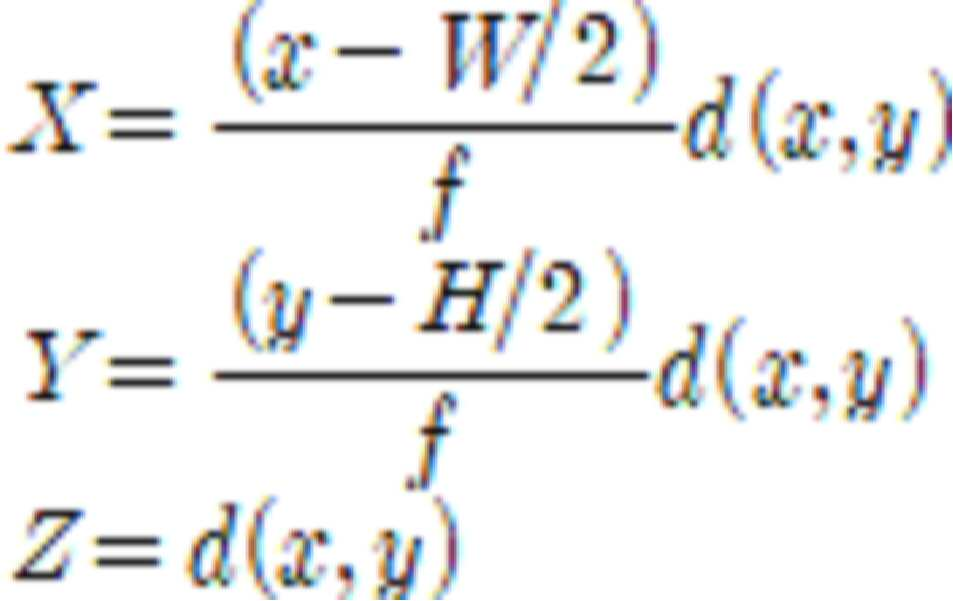
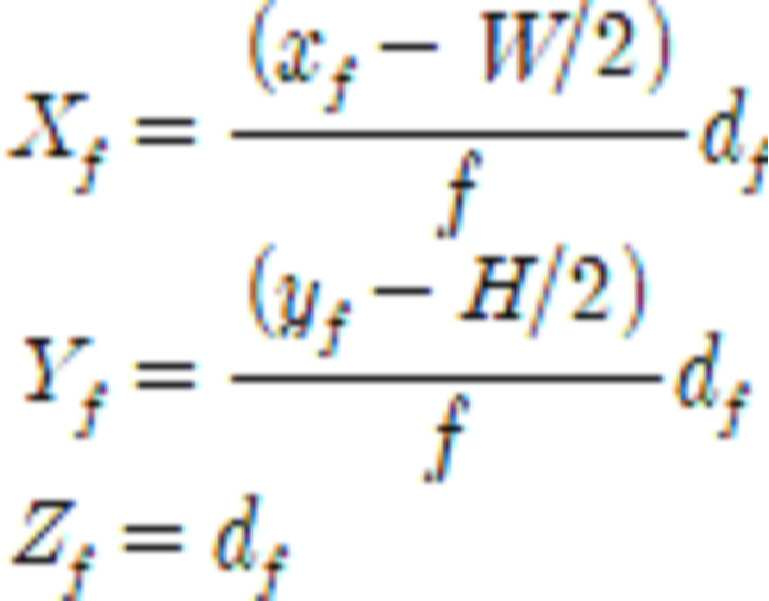
상기 검출된 정수리 화소와 발끝 화소를 3차원 좌표점으로 변환하는 단계는,
상기 정수리 화소와 발끝 화소에 대응되는 2차원 좌표점을 각각 P(x_h, y_h)와 P(x_f, y_f)라 할 때, 수학식(2)에 의해 3차원 좌표점들로 변환하는
..................수학식(2)
(여기서, f는 깊이 카메라의 초점 거리이며, W와 H는 깊이 화면의 폭과 높이이다)
신장 추정방법. - 제6항에 있어서,
상기 변환된 3차원 좌표점들에 대해 화소 유사도를 검사하는 단계는,
상기 검출된 정수리 화소를 중심으로 좌측, 우측 및 하단 방향으로 r 화소 내에 위치한 화소들에 대한 아래 수학식(6)에 의해 분산도()를 계산하고, 계산된 분산도( )의
)의 가 기 설정된 임계값(
가 기 설정된 임계값( )보다 작은 값을 가지면 정수리 화소와 이웃하는 화소들은 유사하다고 판단하는
)보다 작은 값을 가지면 정수리 화소와 이웃하는 화소들은 유사하다고 판단하는
................수학식(6)
신장 추정방법. - 제7항에 있어서,
상기 계산된 분산도()의 가 기 설정된 임계값(
가 기 설정된 임계값( )보다 큰 경우에는 정수리 화소와 이웃하는 화소들은 유사하지 않다고 판단하여 검출된 정수리 화소를 폐기하고 상기 이진화 이미지의 검출된 신체 영역에서 새로운 정수리 화소를 선택하는
)보다 큰 경우에는 정수리 화소와 이웃하는 화소들은 유사하지 않다고 판단하여 검출된 정수리 화소를 폐기하고 상기 이진화 이미지의 검출된 신체 영역에서 새로운 정수리 화소를 선택하는
신장 추정방법. - 제7항에 있어서,
상기 정수리 화소와 이웃하는 화소들은 유사하다고 판단하는 경우에는 상기 변환된 3차원 좌표점들을 이용하여 아래 수학식(5)에 의해 깊이 영상 내의 사람에 대한 추정 신장을 계산하는
..........................수학식(5)
신장 추정방법. - 제9항에 있어서,
상기 깊이 영상을 구성하는 복수의 깊이 이미지 프레임들에 대해 각각의 추정 신장을 계산하고, n번째 깊이 이미지 프레임에 대해 n개의 추정 신장들에 대한 누적 평균값을 계산하여 상기 n번째 깊이 이미지 프레임에 대한 추정 신장을 계산된 누적 평균값으로 보정하는
신장 추정방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210009656A KR102538116B1 (ko) | 2021-01-22 | 2021-01-22 | 색상과 깊이 영상을 이용한 신장 추정 시스템 및 그 추정방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210009656A KR102538116B1 (ko) | 2021-01-22 | 2021-01-22 | 색상과 깊이 영상을 이용한 신장 추정 시스템 및 그 추정방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20220106576A true KR20220106576A (ko) | 2022-07-29 |
| KR102538116B1 KR102538116B1 (ko) | 2023-05-26 |
Family
ID=82606590
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210009656A Active KR102538116B1 (ko) | 2021-01-22 | 2021-01-22 | 색상과 깊이 영상을 이용한 신장 추정 시스템 및 그 추정방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102538116B1 (ko) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116831560A (zh) * | 2023-05-12 | 2023-10-03 | 青岛大学 | 一种基于骨骼关键点识别的人体身高检测方法 |
| KR20240081641A (ko) * | 2022-11-30 | 2024-06-10 | 인하대학교 산학협력단 | 인물 인식을 이용하여 성장 일기를 생성하는 방법 및 시스템 |
| CN119632542A (zh) * | 2024-11-25 | 2025-03-18 | 佛山市顺德区昌兴健康管理有限公司 | 一种自适应调整高精度身体特征测量系统 |
| CN120431157A (zh) * | 2025-07-07 | 2025-08-05 | 杭州云栖智慧视通科技有限公司 | 无参照物下基于视频分析的行人身高估计方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007323572A (ja) * | 2006-06-05 | 2007-12-13 | Nec Corp | 物体検出装置、物体検出方法および物体検出プログラム |
| KR20150081773A (ko) * | 2014-01-07 | 2015-07-15 | 디노플러스 (주) | 인체 관절 정보를 이용한 신장 측정장치 및 그 방법 |
| KR101878095B1 (ko) | 2017-02-07 | 2018-07-12 | 동의대학교 산학협력단 | 전방의 깊이 영상을 이용한 사람의 키 추정 방법 및 장치 |
-
2021
- 2021-01-22 KR KR1020210009656A patent/KR102538116B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007323572A (ja) * | 2006-06-05 | 2007-12-13 | Nec Corp | 物体検出装置、物体検出方法および物体検出プログラム |
| KR20150081773A (ko) * | 2014-01-07 | 2015-07-15 | 디노플러스 (주) | 인체 관절 정보를 이용한 신장 측정장치 및 그 방법 |
| KR101878095B1 (ko) | 2017-02-07 | 2018-07-12 | 동의대학교 산학협력단 | 전방의 깊이 영상을 이용한 사람의 키 추정 방법 및 장치 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240081641A (ko) * | 2022-11-30 | 2024-06-10 | 인하대학교 산학협력단 | 인물 인식을 이용하여 성장 일기를 생성하는 방법 및 시스템 |
| CN116831560A (zh) * | 2023-05-12 | 2023-10-03 | 青岛大学 | 一种基于骨骼关键点识别的人体身高检测方法 |
| CN119632542A (zh) * | 2024-11-25 | 2025-03-18 | 佛山市顺德区昌兴健康管理有限公司 | 一种自适应调整高精度身体特征测量系统 |
| CN120431157A (zh) * | 2025-07-07 | 2025-08-05 | 杭州云栖智慧视通科技有限公司 | 无参照物下基于视频分析的行人身高估计方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102538116B1 (ko) | 2023-05-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102538116B1 (ko) | 색상과 깊이 영상을 이용한 신장 추정 시스템 및 그 추정방법 | |
| US10701332B2 (en) | Image processing apparatus, image processing method, image processing system, and storage medium | |
| CN109076198B (zh) | 基于视频的对象跟踪遮挡检测系统、方法和设备 | |
| US10573018B2 (en) | Three dimensional scene reconstruction based on contextual analysis | |
| Weinzaepfel et al. | Learning to detect motion boundaries | |
| US9245344B2 (en) | Method and apparatus for acquiring geometry of specular object based on depth sensor | |
| RU2426172C1 (ru) | Способ и система выделения данных об изображении объекта переднего плана на основе данных о цвете и глубине | |
| EP3300022B1 (en) | Image processing apparatus, image processing method, and program | |
| KR102214934B1 (ko) | 단항 신뢰도 및 쌍별 신뢰도 학습을 통한 스테레오 매칭 장치 및 방법 | |
| JP6276519B2 (ja) | 人数計測装置および人物動線解析装置 | |
| JP6554169B2 (ja) | 物体認識装置及び物体認識システム | |
| US8805065B2 (en) | Image processing apparatus and image processing method | |
| US9727974B2 (en) | System for video super resolution using semantic components | |
| US20160253579A1 (en) | Image processing apparatus, image processing method, and storage medium | |
| EP3503030A1 (en) | Method and apparatus for generating a three-dimensional model | |
| JP7159384B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| KR20220024494A (ko) | 사람의 단안 깊이 추정을 위한 방법 및 시스템 | |
| KR100953076B1 (ko) | 객체 또는 배경 분리를 이용한 다시점 정합 방법 및 장치 | |
| EP2977932B1 (en) | Image processing apparatus, image processing method and image processing program | |
| KR20140045854A (ko) | 단일객체에 대한 기울기를 추정하는 영상을 감시하는 장치 및 방법 | |
| KR20160037643A (ko) | 객체 인식을 위한 객체 후보영역 설정방법 및 장치 | |
| KR20170081808A (ko) | 깊이 영상에서의 객체 검출 시스템 및 방법 | |
| US20160035107A1 (en) | Moving object detection | |
| US10593044B2 (en) | Information processing apparatus, information processing method, and storage medium | |
| CN117078735B (zh) | 身高检测方法、系统、电子设备和存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-5-5-R10-R17-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |