이하, 첨부한 도면을 참조하여 본 개시의 실시예에 대해 상세히 설명한다.
도 1은 본 개시의 예시적 실시예에 따른 전자 장치(10)를 나타내는 블록도이다. 전자 장치(10)는 전기적 에너지를 사용하여 목적하는 기능을 수행하도록 구성된 임의의 장치를 지칭할 수 있고, 전기(electrical) 시스템으로 지칭될 수 있다. 예를 들면, 전자 장치(10)는 반도체 공정에 의해서 제조되는 반도체 칩일 수도 있고, 기판(board) 및 기판에 장착된(mounted) 적어도 하나의 반도체 칩을 포함하는 모듈일 수도 있으며, 상호 통신하는 2이상의 모듈들로 구성될 수도 있다. 또한, 전자 장치(10)는, 모바일 폰과 같이 독립적으로 사용되는 단위일 수도 있고, 자동차 등과 같은 전체 시스템의 부품일 수도 있다. 도 1에 도시된 바와 같이, 전자 장치(10)는 제어기(11), 램프 생성기(13), 모니터링 회로(15), 및 메인 회로(17)를 포함할 수 있다.
제어기(11)는 전자 장치(10)를 전반적으로 제어할 수 있다. 예를 들어, 제어기(11)는 전자 장치(10)에 포함된 기능부들을 각각 제어하는 제어 신호들을 출력함으로써 전자 장치(10)가 설계된 목적에 따른 기능을 제공할 수 있다.
예시적인 실시예에 따르면, 제어기(11)는 램프 생성기(13)를 제어할 수 있다. 예를 들어, 제어기(11)는 램프 생성기(13)에서 생성되는 신호의 진폭, 듀티 비(Duty Ratio), 인가 시간 등을 제어하기 위한 제어 신호(CTR)를 램프 생성기(13)에 제공함으로써, 전자 장치(10)에 요구되는 램프 신호(RMP)가 각 기능부가 설계된 목적에 적합하게 제공되도록 제어할 수 있다.
예시적인 실시예에 따르면, 제어기(11)가 생성하는 제어 신호(CTR)는 전원 신호, 프리셋 신호, 리셋 신호, 모니터링 신호, 및/또는 파워 다운 신호 등을 포함할 수 있다. 도 3 및 도 6을 통하여 전원 신호(PWR), 프리셋 신호(PRST), 리셋 신호(RST), 모니터링 신호(MNT), 및 파워 다운 신호(PD)가 설명될 것이다.
제어기(11)는 중앙 처리 장치(Central Procesing Unit; CPU), 산술 및 논리 연산, 비트 쉬프트 등을 수행하는 ALU(Arithmetic Logic Unit), DSP(Digital Signal Processor), 마이크로프로세서(microprocessor), ASIC(Application Specific Integrated Circuit), 컨트롤 로직(control logic) 등으로 구현될 수 있으나, 이에 제한되지 않음은 이해될 것이다. 일부 실시예들에서, 제어기(11)는 복수의 논리 게이트들로 구성된 스테이트 머신을 포함할 수도 있고, 프로세서 및 프로세서에 의해서 실행되는 명령어들(instructions)을 저장하는 메모리를 포함할 수도 있다.
램프 생성기(13)는 일정한 기울기를 가지며 점차적으로 증가하거나 감소하는 램프 신호(RMP)를 생성할 수 있다. 예시적인 실시예에 따르면, 램프 생성기(13)는 제어 신호(CTR)에 응답하여 특정한 기울기, 램핑 시간, 램핑 개시 전압 레벨, 및/또는 램핑 종료 전압 레벨 등을 가지는 램프 신호(RMP)를 생성할 수 있다. 램프 생성기(13)는 디지털-아날로그 컨버터 등과 같은 복잡한 구조로 구현되거나, 도 4a 및 도 4b를 참조하여 후술되는 바와 같이 단순한 구조로 구현됨으로써 램프 신호(RMP)를 생성할 수 있다.
램프 신호(RMP)는 일정한 크기로 점진적으로 상승하거나 하강하는 신호이다. 객체를 센싱하거나, 아날로그 신호를 디지털화하는 기능을 제공할 수 있는 전자 장치(10)는, 램프 신호(RMP)를 생성함으로써 센싱된 객체에 대한 신호 또는 데이터를 샘플링할 수 있고, 아날로그 형태의 샘플링된 신호 또는 데이터는 디지털 정보로 변환될 수 있다.
램프 신호(RMP)는 리셋을 위한 리셋 램핑 구간, 및 신호를 센싱하기 위한 신호 램핑 구간을 포함할 수 있다. 예를 들어, 램프 신호(RMP)가 상관 이중 샘플링(Correlated Double Sampling; CDS)에 이용되는 경우, 램프 신호(RMP)는 리셋 램핑 구간, 및 신호 램핑 구간을 순차적으로 가질 수 있다.
램프 신호(RMP)가 가지는 하나의 램핑 구간, 또는 순차적으로 가지는 리셋 램핑 구간 및 신호 램핑 구간은 하나의 단위로서 처리될 수 있다. 예시적인 실시예에 따르면, 램프 신호(RMP)가 상관 이중 샘플링을 위해 이용되는 경우, 하나의 램핑 구간을 가지는 램프 신호(RMP), 또는 리셋 램핑 구간 및 신호 램핑 구간을 순차적으로 가지는 램프 신호(RMP)는 하나의 이미지 프레임에 대한 샘플링을 위해 이용될 수 있다. 이미지 프레임에 대한 샘플링은 로우마다 수행될 수 있다. 예를 들어, 전자 장치(10)는 램프 신호(RMP)의 램핑 구간을 이용하여 이미지 프레임중 제1 로우(row)에 대한 샘플링을 수행한 후, 다시 새로운 램핑 구간을 이용하여 이미지 프레임 중 제2 로우에 대한 샘플링을 수행할 수 있다. 이미지 프레임에 대한 샘플링은 로우의 최상단에서부터 최하단까지 순차적으로(row-by-row) 수행될 수 있으나, 이에 제한되지는 않는다.
메인 회로(17)는 전자 장치(10)가 제공하는 기능들 중 적어도 하나 또는 전자 장치(10)가 제공하는 주 기능을 제공하도록 설계될 수 있다. 메인 회로(17)는 전자 장치(10)가 제공하는 기능을 출력 신호(OUT)로서 외부에 출력할 수 있다. 예를 들면, 메인 회로(17)는 아날로그 필터, 증폭기 등과 같은 아날로그 회로를 포함할 수도 있고, 디지털 신호를 처리하는 디지털 회로를 포함할 수도 있으며, 아날로그-디지털 변환기나 디지털-아날로그 변환기와 같이 혼성(mixed) 신호를 처리하는 회로를 포함할 수도 있다.
본 개시의 예시적인 실시예에 따르면, 메인 회로(17)는 램프 신호(RMP)에 기반하여 데이터를 검출함으로써 미리 정의된 기능을 수행할 수 있다. 예를 들어, 메인 회로(17)는 램프 신호(RMP)에 기초하여 데이터에 대해 상관 이중 샘플링(CDS)을 수행하는 CDS 회로일 수 있거나, CDS 기능을 포함하는 아날로그-디지털 컨버팅(Analog-Digital Converting) 회로일 수 있다. 이 외에도, 메인 회로(17)는 일정한 기울기를 가지며 점진적으로 상승하거나 하강하는 램프 신호(RMP)를 이용하여 다양한 기능을 제공할 수 있다. 본 개시의 예시적인 실시예에 따르면, 메인 회로(17)는 램프 신호(RMP)의 기울기가 변동되더라도 정상 동작할 수 있는 허용 범위, 또는 정상 동작 범위를 가질 수 있고, 허용 범위는 메인 회로(17)의 기능마다 서로 상이할 수 있다.
이하에서, 메인 회로(17)로는 램프 생성기(13)로부터 생성된 램프 신호(RMP)에 기초하여 전자 장치(10)가 제공하는 주 기능을 제공하는 회로로서 설명될 수 있으나, 본 개시의 예시적 실시예들이 이에 제한되지 아니하는 점은 이해될 것이다
메인 회로(17)는, 전자 장치(10)의 제조시 발생한 불량, 램프 생성기(13) 등 메인 회로(17)에 신호를 제공하는 다른 기능부의 에이징(aging)에 따른 열화, 전자 장치(10)의 외부로부터 가해진 충격 등에 기인하여, 설계된 기능을 정상적으로 수행하지 못할 수 있다. 메인 회로(17)로 제공되는 신호(예를 들어, 램프 신호(RMP))가 정상적이지 않는 경우, 전자 장치(10)는 물론 전자 장치(10)를 포함하는 시스템의 오류를 유발할 수 있다. 예를 들면, 전자 장치(10)가 자동차에 포함되어 주행(예컨대, 자율 주행)에 필요한 기능을 수행하는 경우, 전자 장치(10)의 오류는 심각한 문제를 유발할 수 있다.
메인 회로(17)(또는 전자 장치(10))의 기능적 오류에 대처하기 위하여, 국제 표준(international standard)이 정의될 수 있고, 전자 장치(10)는 해당 국제 표준을 준수할 것이 요구될 수 있다. 예를 들면, ISO26262는 국제 표준화 기구(International Standard Organization; ISO)에 의해서 규정된 것으로서, 자동차 기능 안정성(Road vehicles - Functional safety)으로 명명될 수 있다.
ISO26262는 자동차에 탑재되는 E/E(electrical and/or electronic) 시스템의 기능적 안정성을 위하여 을 달성하기 위한 전반적인 개발 프로세스에 대한 다양한 요건들을 정의할 수 있다. 예를 들어, ISO26262는 자동차 안전 무결성 수준 (Automotive Safety Integrity Level; ASIL) 조건의 충족을 요구할 수 있다. 자동차 안전 무결성 수준(ASIL)은 차량 위험 사건의 위험 요소로서 노출성, 부상 정도, 및 조작 가능성 3 개를 기준으로 위험도 평가를 수행하며, 각 위험 요소들마다 정의된 점수의 합산을 통해 ASIL 등급이 결정된다. 즉, ISO26262의 ASIL 조건 충족을 위해, 예컨대 메인 회로(17)를 상시 모니터링하는 구성요소인 모니터링 회로(15)의 탑재가 요구될 수 있다.
모니터링 회로(15)는 메인 회로(17)에 제공되는 신호의 정상 여부를 모니터링할 수 있다. 예를 들면, 도 1에 도시된 바와 같이, 모니터링 회로(15)는 램프 생성기(13)로부터 출력되는 램프 신호(RMP)가 정상 범위 내에서 동작하는지 모니터링할 수 있고, 그 결과로서 검증 신호(VFY)를 생성할 수 있다. 예를 들어, 램프 신호(RMP)가 정상적으로 동작하지 아니하는 경우, 모니터링 회로는 검증 신호(VFY)로서 불량을 나타내는 플래그를 생성할 수 있다. 예를 들어, 램프 신호(RMP)가 정상적으로 동작하는 경우, 모니터링 회로는 검증 신호(VFY)로서 정상을 나타내는 플래그를 생성할 수 있다.
제어기(11)는 검증 신호(VFY)의 플래그를 확인하고, 메인 회로(17)에 제공되는 신호가 불량임에 따라 해당 신호에 기초한 동작 모드를 중단할 수 있다. 예시적인 실시예에 따르면, 제어기(11)는 검증 신호(VFY)로서 불량 플래그를 수신함에 따라 램프 신호(RMP)가 정상 범위 내에서 동작하지 않음을 확인할 수 있다. 그에 따라, 제어기(11)는 램프 신호(RMP)에 기반하여 동작하는 메인 회로(17)의 동작 모드를 중단시킬 수 있다. 예를 들면, 전자 장치(10)는 차량의 자율 주행 기능을 제공할 수 있고, 메인 회로(17)는 램프 신호(RMP)에 기반하여 상관 이중 샘플링(Correlated Double Sampling; CDS)을 수행하는 이미지 센서, 또는 이미지 센서의 리드아웃 회로일 수 있다. 제어기(11)는 램프 신호(RMP)가 정상 범위 외임을 나타내는 검증 신호(VFY)를 수신할 수 있고, 이에 따라 차량의 자율 주행 모드를 수동 주행 모드로 전환함으로써, 전자 장치(10)의 사용자는 안전이 확보될 수 있다.
일부 실시예들에서, 도 1에 도시된 바와 상이하게, 검증 신호(VFY)는 전자 장치(10) 내부에 제공되는 대신, 외부로 출력될 수도 있다. 이에 따라, 외부로 출력되는 검증 신호(VFY) 에 기초하여 전자 장치(10)가 정상적으로 동작하지 아니하는 경우 필요한 후속 조치가 적절하게 취해질 수 있다.
본 개시의 예시적인 실시예에 따르면, 모니터링 회로(15)는 미분기를 포함할 수 있다. 예를 들어, 모니터링 회로(15)는 일정한 기울기로 점진적으로 상승하거나 하강하는 램프 신호(RMP)를 시간에 대해 미분함으로써 램프 신호(RMP)가 정상 범위 내에서 메인 회로(17)에 제공되는 지를 즉각적으로 모니터링할 수 있다. 미분기를 포함하는 모니터링 회로(15)의 구현에 관하여는 도 2 및 도 3을 참조하여 후술될 것이다.
전술된 바와 같이, 전자 장치(10)가 차량에 적용될 경우, 전자 장치(10)의 적절한 기능을 위한 각종 신호가 정상 범위 내에서 제공되지 않는 경우, 차량의 특성상 사용자의 안전에 중대한 문제를 초래할 수 있으므로, 전자 부품의 이상 동작은 즉각적으로 검출될 필요가 있다. 본 개시의 예시적 실시예에 따른 모니터링 회로는 전자 장치(10)의 기능을 제공하기 위한 다른 기능부(예를 들어, 램프 생성기(13))를 정확하게 모니터링함으로써, 전자 장치(10)의 신뢰도를 향상시킬 수 있다. 또한, 본 개시의 예시적 실시예에 따른 모니터링 회로는 전자 장치(10)에 발생한 불량를 즉각적으로 확인하고 불량이 발생한 기능부를 사용하는 동작 모드를 중단함으로써 시스템 사용자의 안전을 도모할 수 있다.
도 2는 본 개시의 예시적인 실시예에 따른 모니터링 회로(100)를 나타내는 블록도이다. 이하에서, 도 2에 대한 설명 중 상호 중복되는 내용은 생략될 것이다.
도 2를 도 1과 함께 참조하면, 모니터링 회로(100)는 미분기(110), 기준 생성기(130), 상한 비교기(150), 하한 비교기(170), 및 판별기(190)를 포함할 수 있다.
미분기(110)는 램프 신호(RMP) 및 미분 기준값(REF_D)에 기초하여 램프 신호(RMP)에 대한 미분 연산을 수행할 수 있고, 그 결과로서 미분 출력(DO)을 생성할 수 있다.
예시적인 실시예에 따르면, 미분기(110)는 램프 신호(RMP)를 시간에 대해 미분할 수 있다. 예를 들어, 미분기(110)는 일정한 기울기를 가지며 점진적으로 상승하거나 점진적으로 하강하는 전압(또는 전류) 신호인 램프 신호(RMP)를 시간에 대해 미분 연산을 수행할 수 있다. 미분기(110)는 일정한 기울기로 하강 램핑 또는 상승 램핑하는 램프 신호를 미분함으로써 램프 신호(RMP)의 기울기 값을 포함하는 미분 출력(DO)을 생성할 수 있다. 미분 출력(DO)은 상한 비교기(150) 및 하한 비교기(170)에 제공될 수 있다.
예시적인 실시예에 따르면, 기준 생성기(130)는 미분기(110)에 미분 연산을 수행하기 위한 미분 기준값(REF_D)을 제공할 수 있다. 예를 들어, 미분기(110)는 연산 증폭기(OP-AMP)의 형태로 구현될 수 있고, 이 때 미분기(110)는 미분 대상 신호(즉, 램프 신호(RMP))와, 미분 대상 신호에 대한 연산을 위한 기준값을 2 개의 입력 단자를 통해 수신할 수 있다. 본 개시에서는 설명의 편의를 위해 미분기(110)가 연산 증폭기의 형태로 구현됨을 예시하였으나, 본 개시의 기술적 사상이 달성하려는 목적을 위해, 미분기(110)는 다양한 아날로그 회로, 디지털 회로, 또는 각각의 조합에 따른 혼성 회로의 형태로 유사한 기능을 제공할 수 있음이 이해되어야 한다.
기준 생성기(130)는, 미분 기준값(REF_D) 외에도, 상한 기준값(REF_U) 및 하한 기준값(REF_L)을 생성할 수 있다. 도 2에 도시되지는 않았으나, 기준 생성기(130)는 제어기(도 1, 11)로부터의 제어 신호에 기초하여 전자 장치(도 1, 10)의 구동에 필요한 각종 기준 신호들을 생성할 수 있다. 예를 들어, 기준 생성기(130)는 일정한 크기를 가지는 전압(또는 전류) 신호를 생성할 수 있고, 일정한 주기로 토글링하는 클럭 신호를 생성할 수도 있다.
상한 기준값(REF_U) 및 하한 기준값(REF_L)은 미리 결정될 수 있다. 예시적인 실시예에 따르면, 상한 기준값(REF_U) 및 하한 기준값(REF_L)은 전자 장치(10)의 제조 과정에서 미리 설정되거나, 사용자에 의해 미리 정의되거나, 메모리(미도시)에 저장된 레지스터를 참조함으로써 미리 결정된 특정한 값일 수 있다. 기준 생성기(130)는 미리 결정된 상한 기준값(REF_U) 및 하한 기준값(REF_L)에 부합하도록 기준 신호들을 생성할 수 있다. 다시 말해, 기준 생성기(130)는 기준 신호들 각각의 진폭(Magnitude)이 상한 기준값(REF_U) 또는 하한 기준값(REF_L)과 실질적으로 근접하도록 기준 신호들을 생성하고, 이를 다른 기능부(예를 들어, 상한 비교기(150) 및 하한 비교기(170))에 제공할 수 있다.
상한 비교기(150)는 미분 출력(DO) 및 상한 기준값(REF_U)을 비교하고, 비교 결과로서 제2 비교 출력(CO2)을 생성할 수 있다. 하한 비교기(170)는 미분 출력(DO) 및 하한 기준값(REF_L)을 비교하고, 비교 결과로서 제2 비교 출력(CO2)을 생성할 수 있다. 제1 비교 출력(CO1) 및 제2 비교 출력(CO2)은 판별기(190)로 제공될 수 있다.
예시적인 실시예에 따르면, 상한 비교기(150) 및 하한 비교기(170)는 연산 증폭기의 형태로 구현될 수 있고, 2 개의 입력 단자로 제공되는 두 신호를 서로 비교할 수 있다. 예를 들어, 상한 비교기(150)는 상한 기준값(REF_U)에서 미분 출력(DO)의 크기를 뺄셈하고, 그 결과를 제1 비교 출력(CO1)으로서 출력할 수 있고, 하한 비교기(170)는 미분 출력(DO)의 크기에서 하한 기준값(REF_L)을 뺄셈할 수 있으나, 본 개시의 기술적 사상은 설명된 연산 방식에 제한되지는 않는다. 본 개시에서는 설명의 편의를 위해 미분기(110)가 연산 증폭기의 형태로 구현됨을 예시하였으나, 본 개시의 기술적 사상이 달성하려는 목적을 위해, 미분기(110)는 다양한 아날로그 회로, 디지털 회로, 또는 각각의 조합에 따른 혼성 회로의 형태로 유사한 기능을 제공할 수 있음이 이해되어야 한다.
전자 장치(10)에 포함되는 전자 부품, 또는 메인 회로(도 1, 17)는 램프 신호(RMP)의 기울기가 변동되더라도 정상 동작할 수 있는 허용 범위(또는 정상 동작 범위)를 가질 수 있고, 허용 범위는 전자 부품, 또는 메인 회로(17)가 제공하는 기능마다 서로 상이할 수 있다. 예를 들어, 메인 회로(17)에서 이용되는 램프 신호(RMP)는 최적의 동작을 위한 권장 기울기, 및 램프 신호(RMP)의 기울기가 일부 변동되더라도 정상적으로 메인 회로(17)의 기능을 제공할 수 있는 허용 범위가 미리 결정될 수 있다.
본 개시의 예시적인 실시예에 따르면, 상한 기준값(REF_U)은 전자 부품에 요구되는 램프 신호(RMP)의 기울기 변동에 대한 허용 범위 중 상한에 상응할 수 있으며, 하한 기준값(REF_L)은 전자 부품에 요구되는 램프 신호(RMP)의 기울기 변동에 대한 허용 범위 중 하한에 상응할 수 있다. 예를 들어, 상한 기준값(REF_U)은 램프 신호(RMP)의 권장 기울기의 2배와 실질적으로 동일할 수 있고, 하한 기준값(REF_L)은 램프 신호(RMP)의 권장 기울기의 1/2배와 실질적으로 동일할 수 있다. 그러나, 예시된 수치(2배, 및 1/2배)는 설명의 편의를 위해 특정된 것이고, 본 개시의 기술적 사상은 기재된 수치에 제한되지 않고 상한 기준값(REF_U)은 권장 기울기의 1.5배 또는 3배인 등 메인 회로(17)의 적절한 동작을 위해 가변될 수 있음이 이해되어야 한다.
판별기(190)는 상한 비교기(150) 및 하한 비교기(170)로부터 제공되는 제1 비교 출력(CO1) 및 제2 비교 출력(CO2)에 기초하여 램프 신호(RMP)의 불량 여부를 판별할 수 있다. 예시적인 실시예에 따르면, 판별기(190)는 제1 비교 출력(CO1)의 신호 레벨에 기초하여 램프 신호(RMP)가 상한 기준값(REF_U)을 상회하였는지 판별할 수 있고, 제2 비교 출력(CO2)의 신호 레벨에 기초하여 램프 신호(RMP)가 하한 기준값(REF_L)을 하회하였는지 판별할 수 있다. 예를 들어, 전술된 바와 같이 제1 비교 출력(CO1)이 상한 기준값(REF_U)에서 미분 출력(DO)의 크기를 뺄셈한 것이라면, 판별기(190)는 제1 비교 출력(CO1)의 값이 양수임에 따라 램프 신호의 기울기가 상한 기준값(REF_U)을 초과하지 않는 정상 범위 내의 동작임을 판별할 수 있고, 제1 비교 출력(CO1)의 값이 음수임에 따라 램프 신호의 기울기가 상한 기준값(REF_U)을 초과하는 불량 동작임을 판별할 수 있다. 유사하게, 전술된 바와 같이 제2 비교 출력(CO2)이 미분 출력(DO)의 크기에서 하한 기준값(REF_L)을 뺄셈한 것이라면, 판별기(190)는 제2 비교 출력(CO2)의 값이 양수임에 따라 램프 신호의 기울기가 하한 기준값(REF_L)에 미달하지 않는 정상 범위 내의 동작임을 판별할 수 있고, 제2 비교 출력(CO2)의 값이 음수임에 따라 램프 신호의 기울기가 상한 기준값(REF_U)에 미달하는 불량 동작임을 판별할 수 있다. 판별기(190)에 관하여는 도 3 및 도 5를 통해 보다 자세히 설명될 것이다.
판별기(190)는 불량 여부를 판별한 결과로서 검증 신호(VFY)를 생성할 수 있다. 예시적인 실시예에 따르면, 검증 신호(VFY)는 램프 신호(RMP)의 불량 여부(또는 정상 여부)를 나타낼 수 있다. 예를 들어, 검증 신호(VFY)는 램프 신호(RMP)가 불량일 경우, 불량 플래그를 포함할 수 있고, 램프 신호(RMP)가 정상일 경우, 정상 플래그를 포함할 수 있다. 본 개시의 예시적인 실시예에 따르면, 검증 신호(VFY)는 전자 장치(10)를 총괄하는 제어기(예를 들어, 도 1의 제어기(11))로 제공됨으로써, 램프 신호(RMP)에 기반한 전자 장치(10)의 기능을 유지하거나, 중단시킬 수 있다. 예를 들어, 불량 플래그를 포함하는 검증 신호(VFY)는 자율 주행 차량의 ECU(Electronic Control Unit), CPU(Central Processing Unit), 또는 주행 제어기로 제공됨으로써 차량의 자율 주행 모드를 중단시킬 수 있다.
도 3은 본 개시의 예시적인 실시예에 따른 모니터링 회로(200)를 보다 상세히 나타내는 회로도이다.
도 3을 도 2와 함께 참조하면, 모니터링 회로(200)는 미분기(210), 기준 생성기(230), 상한 비교기(250), 하한 비교기(270), 및 판별기(290)를 포함할 수 있다. 이하에서, 도 3에 대한 설명 중 도 1 및 도 2와 상호 중복되는 내용은 생략될 것이다.
미분기(210)가 연산 증폭기의 조합으로 구현되는 실시예에 따르면, 미분기(210)는 앰프(AMP), 저항(RD) 및 커패시터(CD)를 포함할 수 있다. 앰프(AMP)는 양의 입력 단자, 및 음의 입력 단자를 통해 입력 신호들을 수신할 수 있고, 앰프(AMP)의 바디(Body)에는 전원 신호(PWR)가 공급될 수 있다. 전원 신호(PWR)가 턴-온(즉, 로직 하이로 천이) 됨에 따라 앰프(AMP)의 동작이 개시될 수 있다.
앰프(AMP)의 음의 입력 단자(negative terminal)에는 커패시터(CD) 및 저항(RD)이 접속(Coupled)될 수 있다. 예시적인 실시예에 따르면, 커패시터(CD)의 다른 일 단에 램프 신호(도 2, RMP)로서 램프 전압(VRAMP)이 인가될 수 있으며, 저항(RD)의 다른 일 단에는 앰프(AMP)의 출력 단자가 접속될 수 있다.
앰프(AMP)의 양의 입력 단자(positive terminal)에는 기준 생성기(230)로부터 생성되는 제0 기준 전압(VREF0)이 인가될 수 있다. 제0 기준 전압(VREF0)은 도 2의 미분 기준값(REF_D)에 상응하는 일정한 전압 레벨을 가지는 전압 신호일 수 있다.
본 개시의 예시적인 실시예에 따르면, 앰프(AMP)의 양의 입력 단자와 음의 입력 단자 사이에, 프리셋 신호(PRST)에 의해 개폐되는 스위치가 연결될 수 있다. 예를 들어, 도 3을 참조하면 앰프(AMP)의 양의 입력 단자와 음의 입력 단자 사이에 스위치의 예시적 구현예인 트랜지스터(TR)의 소스 단 및 드레인 단이 각각 연결될 수 있으며, 트랜지스터(TR)의 게이트 단에는 프리셋 신호(PRST)가 인가될 수 있다.
프리셋 신호(PRST)가 스위치(예를 들어, 트랜지스터(TR))을 턴-온 시킨다면, 앰프(AMP)의 양의 입력 단자와 음의 입력 단자는 단락될 수 있고, 앰프(AMP)의 입력단을 통해 인가되는 전압은 양의 입력 단자와 음의 입력 단자에서 모두 동일할 수 있다. 예시적인 실시예에 따르면, 실질적으로 연산 증폭기로 구현될 수 있는 앰프(AMP)는 양의 입력 단자를 통해 인가된 전압과 음의 입력 단자를 통해 인가된 전압의 차이를 이득(GAIN)만큼 증폭시켜 출력할 수 있다. 양의 입력 단자와 음의 입력 단자에 실질적으로 동일한 전압이 인가된다면, 앰프(AMP)의 전달 컨덕턴스(transconductance; gm)는 상대적으로 매우 높아질 수 있고, 따라서 램프 전압(VRAMP)의 인가에 따른 신호의 과도 상태(transient state)는 비교적 빠르게 안정화될 수 있다. 프리셋 신호(PRST)의 턴-온에 따라 미분기(210)가 빠르게 안정되는 동작은 프리셋 동작이라고 지칭될 수 있고, 프리셋 신호(PRST)의 턴-온되는 구간은 프리셋 구간이라고 지칭될 수 있다. 프리셋 구간에 대하여는 도 6를 통하여 보다 상세히 설명될 것이다.
미분기(210)는 입력 단자를 통해 수신된 램프 전압(VRAMP)을 시간에 대해 미분함으로써 램프 전압(VRAMP)의 기울기를 산출하고, 기울기에 상응하는 전압 레벨을 가지는 미분 출력 전압(VDO)을 생성할 수 있다. 미분 출력 전압(VDO)은 상한 비교기(250) 및 하한 비교기(270)에 제공될 수 있다.
기준 생성기(230)는 제0 기준 전압(VREF0), 제1 기준 전압(VREF1) 및 제2 기준 전압(VREF2)을 생성할 수 있다. 예시적인 실시예에 따르면, 제0 기준 전압(VREF0)은 전술된 바와 같이 앰프(AMP)에 제공될 수 있으며, 제1 기준 전압(VREF1)은 상한 비교기(250)에 제공될 수 있고, 제2 기준 전압(VREF2)은 하한 비교기(270)에 제공될 수 있다. 기준 생성기(230)의 일 단을 통해 전원 신호(PWR)가 공급될 수 있다.
상한 비교기(250) 및 하한 비교기(270)는 어느 하나의 입력 단자를 통해 미분 출력 전압(VDO)을 수신하고, 다른 하나의 입력 단자를 통해 제1 기준 전압(VREF1) 또는 제2 기준 전압(VREF2)을 수신할 수 있다. 예를 들어, 상한 비교기(250)는 양의 입력 단자를 통해 제1 기준 전압(VREF1)을 제공받고, 음의 입력 단자를 통해 미분 출력 전압(VDO)을 제공받을 수 있다. 상한 비교기(250)는 제1 기준 전압(VREF1)과 미분 출력 전압(VDO)에 대한 차 연산을 수행하고, 그 결과로서 제1 비교 출력 전압(VCO1)을 생성할 수 있다. 유사하게, 하한 비교기(270)는 양의 입력 단자를 통해 제2 기준 전압(VREF2)을 제공받고, 음의 입력 단자를 통해 미분 출력 전압(VDO)을 제공받을 수 있다. 하한 비교기(270)는 미분 출력 전압(VDO)과 제2 기준 전압(VREF2)에 대한 차 연산을 수행하고, 그 결과로서 제2 비교 출력 전압(VCO2)을 생성할 수 있다. 상한 비교기(250) 및 하한 비교기(270) 각각의 바디에는 전원 신호(PWR)가 공급될 수 있다. 전원 신호(PWR)가 턴-온(즉, 로직 하이로 천이) 됨에 따라 상한 비교기(250) 및 하한 비교기(270)의 동작이 개시될 수 있다.
전원 신호(PWR)가 턴-온(즉, 로직 하이로 천이) 됨에 따라 판별기(290)의 동작이 개시될 수 있다. 또한, 판별기(290)의 일 단자를 통해 리셋 신호(RST)가 인가될 수 있다. 리셋 신호(RST)가 턴-온 됨에 따라, 제1 비교 출력 전압(VCO1) 및 제2 비교 출력 전압(VCO2)에 대한 판별 동작이 개시될 수 있다.
판별기(290)는 제1 비교 출력 전압(VCO1) 및 제2 비교 출력 전압(VCO2)을 수신하고, 램프 전압(VRAMP)의 불량 여부를 판별할 수 있다. 예시적인 실시예에 따르면, 판별기(290)는 제1 비교 출력 전압(VCO1)이 기준값보다 큼을 확인하고 램프 전압(VRAMP)이 정상임을 판별할 수 있으며, 제1 비교 출력 전압(VCO1)이 기준값보다 작음을 확인하고 램프 전압(VRAMP)이 불량임을 판별할 수 있다. 유사하게, 판별기(290)는 제2 비교 출력 전압(VCO2)이 기준값보다 큼을 확인하고 램프 전압(VRAMP)이 정상임을 판별할 수 있으며, 제2 비교 출력 전압(VCO2)이 기준값보다 작음을 확인하고 램프 전압(VRAMP)이 불량임을 판별할 수 있다. 예를 들어, 기준값은 0일 수 있으나, 전자 장치(10)가 사용되는 환경, 조건, 사용자의 설정, 초기값 등에 따라 가변될 수 있다.
판별기(290)의 일 단자를 통해 모니터링 신호(MNT)가 인가될 수 있다. 모니터링 신호(MNT)가 턴-온된 구간 동안, 판별기(290)는 제1 비교 출력 전압(VCO1) 및/또는 제2 비교 출력 전압(VCO2)에 기초한 램프 전압(VRAMP)의 판별 동작에 대한 결과를 출력할 수 있다. 예를 들어, 판별기(290)는 모니터링 신호(MNT)가 턴-온된 구간 동안, 램프 전압(VRAMP)에 대한 정상 여부를 판별하고, 판별 결과로서 검증 신호(VFY)를 생성하고 출력할 수 있다. 모니터링 신호(MNT)가 턴-온된 구간은 모니터링 구간이라고 지칭될 수 있다. 모니터링 구간에 관하여는 도 6을 통하여 보다 상세히 설명될 것이다.
예시적인 실시예에 따르면, 판별기(290)는 모니터링 구간 동안, 제1 비교 출력 전압(VCO1) 또는 제2 비교 출력 전압(VCO2) 중 어느 하나가 기준값보다 작음에 따라 램프 전압(VRAMP)이 불량임을 판별하고, 불량 플래그를 포함하는 검증 신호(VFY)를 생성할 수 있다. 예시적인 실시예에 따르면, 판별기(290)는 제1 비교 출력 전압(VCO1) 및 제2 비교 출력 전압(VCO2) 모두가 기준값보다 큼에 따라 램프 전압(VRAMP)이 정상임을 판별하고, 정상 플래그를 포함하는 검증 신호(VFY)를 생성할 수 있다.
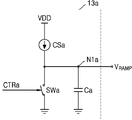
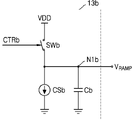
도 4a, 도 4b, 및 도 4c는 본 개시의 예시적 실시예들에 따른 램프 생성기(230a 또는 230b)의 예시들을 나타내는 회로도들이다. 구체적으로, 도 4a의 회로도는 점진적으로 상승하는 램프 전압(VRAMP)을 생성하는 램프 생성기(13a)를 나타내고, 도 4b는 점진적으로 하강하는 램프 전압(VRAMP)을 생성하는 램프 생성기(13b)를 나타낸다. 도 4c는 점진적으로 상승하거나 하강하는 램프 전압(VRAMP)을 생성하는 램프 생성기(13c)를 나타낸다. 도 4a, 도 4b, 및 도 4c의 램프 생성기(13a, 13b, 또는 13c)는 도 1의 램프 생성기(13)의 예시적 구현예일 수 있으며, 이하에서, 도 4a, 도 4b, 및 도 4c에 대한 설명 중 상호 중복되는 내용은 생략될 것이다.
도 4a를 참조하면, 램프 생성기(13a)는 전류원(CSa), 스위치(SWa) 및 캐패시터(Ca)를 포함할 수 있다. 전류원(CSa)은 양의 공급 전압(VDD)으로부터 제1 노드(N1a)에 일정한 전류를 제공할 수 있다. 스위치(SWa) 및 캐패시터(Ca)는 제1 노드(N1a) 및 접지 노드 사이에서 병렬 연결될 수 있다. 스위치(SWa)는 제어 신호(CTRa)에 따라 온(on)되거나 오프(off)될 수 있고, 일부 실시예들에서 제어 신호(CTRa)에 의해서 제어되는 트랜지스터를 포함할 수 있다. 예를 들면, 스위치(SWa)는 활성화된 제어 신호(CTRa)에 응답하여 오프될 수 있는 한편, 비활성화된 제어 신호(CTRa)에 응답하여 온될 수 있다. 이에 따라, 정상 모드에서 전류원(CSa)이 제공하는 전류는, 스위치(SWa)를 통해 접지 노드로 흐를 수 있고, 제1 노드(N1a)의 전압, 즉 램프 전압(VRAMP)은 접지 전위와 근사적으로 일치할 수 있다. 다른 한편으로, 전류원(CSa)이 제공하는 전류는 캐패시터(Ca)에 제공될 수 있고, 캐패시터(Ca)가 충전됨으로써 램프 전압(VRAMP)은 접지 전위로부터 점진적으로 상승할 수 있다. 시험 모드에서 램프 전압(VRAMP)의 기울기는 전류원(CSa)이 제공하는 전류 및 캐패시터(Ca)의 캐패시턴스에 의존할 수 있다.
도 4b를 참조하면, 램프 생성기(13b)는 전류원(CSb), 스위치(SWb) 및 캐패시터(Cb)를 포함할 수 있다. 전류원(CSb) 및 캐패시터(Cb)는 제1 노드(N1b) 및 접지 노드 사이에서 병렬 연결될 수 있다. 전류원(CSb)은 제1 노드(N1b)로부터 접지 노드로 일정한 전류를 인출(drain)할 수 있다. 스위치(SWb)는 제2 제어 신호(CTRb)에 따라 양의 공급 전압(VDD)을 제1 노드(N1b)에 선택적으로 인가할 수 있다. 예를 들면, 스위치(SWb)는 활성화된 제어 신호(CTRb)에 응답하여 오프될 수 있는 한편, 비활성화된 제어 신호(CTRb)에 응답하여 온될 수 있다. 이에 따라, 정상 모드에서 전류원(CSb)은 양의 공급 전압(VDD)으로부터 전류를 인출할 수 있고, 제1 노드(N1b)의 전압, 즉 램프 전압(VRAMP)은 양의 공급 전압(VDD)과 근사적으로 일치할 수 있다. 다른 한편으로, 전류원(CSb)은 캐패시터(Cb)로부터 전류를 인출할 수 있고, 캐패시터(Cb)가 방전됨으로써 램프 전압(VRAMP)은 양의 공급 전압(VDD)으로부터 점진적으로 하강할 수 있다. 시험 모드에서 램프 전압(VRAMP)의 기울기는 전류원(CSb)이 인출하는 전류 및 캐패시터(Cb)의 캐패시턴스에 의존할 수 있다. 이하에서, 램프 생성기는, 도 4a의 램프 생성기(13a)와 같이, 점진적으로 상승하는 램프 전압(VRAMP)을 생성하는 것으로 가정되나, 본 개시의 예시적 실시예들이 이에 제한되지 아니하며 점진적으로 하강하는 램프 전압(VRAMP)에도 유사하게 적용될 수 있는 점은 이해될 것이다.
도 4c는 전류원(CSc), 스위치(SWc), 및 저항(Rc)을 포함할 수 있다. 전류원(CSc)은 양의 공급 전압(VDD)으로부터 제1 노드(N1c) 또는 제2 노드(N2c)에 일정한 전류를 제공할 수 있다. 일부 실시예들에서 제어 신호(CTRc)에 의해서 제어되는 트랜지스터를 포함할 수 있으며, 트랜지스터는 제어 신호(CTRc)에 의해 개폐될 수 있다. 스위치(SWc)는 제어 신호(CTRc)에 따라 제1 노드(N1c)를 통해 저항(Rc)에 접속되거나, 제1 노드(N1c)를 통해 그라운드(즉, 접지 노드)에 직접 연결될 수 있다. 예를 들면, 스위치(SWc)는 활성화된 제어 신호(CTRc)에 응답하여 저항(Rc)에 연결될 수 있고, 비활성화된 제어 신호(CTRc)에 응답하여 그라운드에 직접 연결될 수 있으며, 활성화 또는 비활성화 제어 신호(CTRc)는 서로 반대의 소자에 연결될 수도 있다.
램프 생성기(13c)는 전류원(CSc), 및 스위치(SWc)를 복수 개 포함할 수 있다. 예시적인 실시예에서, 스위치(SWc)가 순차적으로 활성화됨에 따라 전류원(CSc)는 저항(Rc)에 연결될 수 있고, 램프 생성기(13c)는 점진적으로 상승하는 램프 전압(VRAMP)를 생성할 수 있다. 예시적인 실시예에서, 스위치(SWc)가 순차적으로 비활성화됨에 따라 전류원(CSc)는 접지 노드(그라운드)에 연결될 수 있고, 램프 생성기(13c)는 점진적으로 하강하는 램프 전압(VRAMP)를 생성할 수 있다. 예를 들어, 램프 생성기(13c)에 전류원(CSc), 및 스위치(SWc)가 N개 포함된 경우, N개의 스위치(SWc)가 모두 제2 노드(N2c)에 연결됨으로써 램프 생성기(13c)는 0V(Volt)의 램프 전압(VRAMP)을 출력할 수 있고, 1개의 스위치(SWc)는 제1 노드(N1c)에, (N-1)개의 스위치(SWc)는 제2 노드(N2c)에 연결됨으로써 램프 생성기(13c)는 제1 레벨을 가지는 램프 전압(VRAMP)을 출력할 수 있으며, N개의 스위치(SWc)가 모두 제1 노드(N1c)에 연결됨으로써 램프 생성기(13c)는 제N 레벨을 가지는 램프 전압(VRAMP)을 출력할 수 있다(상승 램핑). 설명된 스위치 연결의 반대 순서를 통해 하강 램핑하는 램프 전압(VRAMP)이 생성됨은 이해될 것이다. 도 5는 본 개시의 예시적 실시예에 따른 판별기(290)의 회로도이다. 도 5의 판별기(290)는 도 3의 판별기(290)를 디지털 로직으로 구현한 예시적 실시예이고, 상호 배치되지 않는 범위 내에서 중복되는 설명은 생략된다.
판별기(290)는 적어도 하나의 논리 게이트 및 플립 플롭(flip-flop), 및/또는 논리 게이트와 플립 플롭들의 조합으로 구현될 수 있다. 예를 들어, 판별기(290)는 제1 게이트(291), 제2 게이트(292), 제3 게이트(293), 제4 게이트(294), 제1 플립 플롭(295), 제2 플립 플롭(296) 및 제5 게이트(297)의 조합으로 설계될 수 있다. 예를 들어, 제1 게이트(291) 및 제5 게이트(297)는 OR 게이트이고, 제2 내지 제4 게이트(292, 293, 294)는 AND 게이트이며, 제1 플립 플롭(295) 및 제2 플립 플롭(296)은 D-플립 플롭일 수 있으나, 반드시 이에 제한되는 것은 아니다. 이하에서는 설명의 편의를 위해 언급된 논리 게이트 및 플립 플롭으로 판별기(290)가 구현되는 것으로 가정될 것이다.
제1 게이트(291)의 입력 단자로 리셋 신호(RST) 및 파워 다운 신호(PD)가 입력될 수 있다. 파워 다운 신호(PD)는 판별기(290)를 포함하는 전자 시스템(예를 들어, 도 1의 전자 장치(10))이 목적하는 기능을 수행하는 전력 공급 신호이다. 램프 신호(RMP)가 하나의 램핑 구간, 또는 리셋 램핑 구간 및 신호 램핑 구간을 순차적으로 가지는 경우, 전원 신호(PWR)는 하나의 램핑 구간 동안 특정 기능을 제공하도록 각 기능부에 전원을 공급하는 신호임에 비해, 파워 다운 신호(PD)는 어느 하나의 램핑 구간에 대한 전력 공급이 아닌, 전자 시스템이 목적하는 기능을 제공하기 위해 전자 시스템의 구동 시간 동안 전력을 전자 시스템, 또는 각 기능 부에 제공하는 신호인 점에서, 양자는 구분될 수 있다. 제1 게이트(291)의 논리 연산 결과는 제1 플립 플롭(295) 및 제2 플립 플롭(296)으로 제공될 수 있다.
제2 게이트(292)의 입력 단자로 모니터링 신호(MNT) 및 전원 신호(PWR)가 입력될 수 있다. 모니터링 신호(MNT)는 판별기(290)의 판별 동작에 대한 결과를 출력시킬 수 있다. 제2 게이트(292)의 논리 연산 결과는 제3 및 제4 게이트(293, 294) 에 공통적으로 제공될 수 있다.
제3 게이트(293)의 입력 단자로, 제1 기준값(REF1) 및 제2 게이트(292)의 논리 연산 결과가 입력될 수 있다. 예를 들어, 제1 기준값(REF1)은 도 3의 제1 기준 전압(VREF1)에 상응할 수 있다. 유사하게, 제4 게이트(294)의 입력 단자로, 제2 기준값(REF2) 및 제2 게이트(292)의 논리 연산 결과가 입력될 수 있다. 예를 들어, 제2 기준값(REF2)은 도 3의 제2 기준 전압(VREF2)에 상응할 수 있다. 제3 게이트(293)의 논리 연산 결과는 제1 플립 플롭(295)으로 제공될 수 있으며, 제4 게이트(294)의 논리 연산 결과는 제2 플립 플롭(296)으로 제공될 수 있다.
제1 플립 플롭(295) 및 제2 플립 플롭(296)은 지연형(DELAY) 플립 플롭인 D-플립 플롭으로 구현될 수 있고, 이에 따라 입력 단자(D), 리셋 단자(R), 클럭 단자(CLK), 출력 단자(Q)를 포함할 수 있다.
도 5를 참조하면, 제1 플립 플롭(295)의 입력 단자(D)에는 전원 전압(VDD)이 제공될 수 있고, 리셋 단자(R)에는 제1 게이트(291)의 논리 연산 결과가 제공될 수 있고, 클럭 단자(CLK)에는 제3 게이트(293)의 논리 연산 결과가 제공될 수 있으며, 출력 단자(Q)로부터 제1 플립 플롭(295)의 논리 연산 결과가 출력될 수 있다. 유사하게, 제2 플립 플롭(296)의 입력 단자(D)에는 전원 전압(VDD)이 제공될 수 있고, 리셋 단자(R)에는 제1 게이트(291)의 논리 연산 결과가 제공될 수 있고, 클럭 단자(CLK)에는 제4 게이트(294)의 논리 연산 결과가 제공될 수 있으며, 출력 단자(Q)로부터 제2 플립 플롭(296)의 논리 연산 결과가 출력될 수 있다.
제5 게이트(297)의 입력 단자로 제1 플립 플롭(295) 및 제2 플립 플롭(296) 각각의 논리 연산 결과가 입력될 수 있다. 제5 게이트(297)는 논리 연산 결과로서, 검증 신호(VFY)를 출력할 수 있다.
도 6은 본 개시의 예시적 실시예에 따라 전자 장치(10)의 동작의 예시를 나타내는 타이밍도이다. 구체적으로, 도 6의 타이밍도는 램프 신호(RMP)를 모니터링하는 도 3의 모니터링 회로(200)의 동작의 예시를 나타낸다. 이하에서, 도 6은 도 1 및 도 3을 참조하여 설명될 것이다.
모니터링 회로(200)는 램프 생성기(도 1, 13)로부터 제공되는 램프 신호(RMP)의 기울기를 검출할 수 있다. 모니터링 회로(200)는 내부에서 생성하는 기준값들(예를 들어, 미분 기준값(REF_D), 상한 기준값(REF_U) 및 하한 기준값(REF_L))에 기반하여 램프 신호의 정상 여부(또는 불량 여부)를 판별할 수 있으며, 내부 신호로서 미분 출력(DO), 및 비교 출력들(CO1, CO2)을 생성할 수 있고, 판별의 결과로서 검증 신호(VFY)를 생성하고 이를 외부로 출력할 수 있다. 예를 들어, 검증 신호(VFY)는 전자 장치(10)의 제어기(11)로 제공됨으로써, 램프 신호(RMP)에 기반한 전자 장치(10)의 동작 모드를 중단시킬 수 있다. 모니터링 회로(200)는 외부로부터 제공되는 파워 다운 신호(PD), 전원 신호(PWR), 프리셋 신호(PRST), 리셋 신호(RST), 및/또는 모니터링 신호(MNT)에 기반하여 램프 신호(RMP)의 미분 연산, 비교 동작의 개시, 및/또는 비교 결과의 출력을 수행할 수 있다.
램프 신호(RMP)는 전압(또는 전류) 신호로 구현될 수 있다. 램프 신호(RMP)는 일정한 전압 레벨(예를 들어, 제2 램프 전압(VRAMP2))을 유지하다가 특정 시점에서부터 점진적으로 감소하거나 증가할 수 있고, 목표 레벨에 도달함에 따라 다시 종전의 일정한 레벨(예를 들어, 제2 램프 전압(VRAMP2))로 회귀하거나, 또는 미리 결정된 다른 레벨(예를 들어, 제1 램프 전압(VRAMP1))로 천이할 수 있다. 예시적인 실시예에 따르면, 램프 신호(RMP)는 상관 이중 샘플링(CDS)에 이용될 수 있고, 이 경우 램프 신호(RMP)는 센싱 정보를 초기화하기 위한 리셋 램핑 구간, 및 샘플링을 수행함으로써 센싱 정보를 생성하는 신호 램핑 구간을 가질 수 있다. 예를 들어, CDS에 이용되는 램프 신호(RMP)는 하나의 처리 주기(cycle)마다 2 개의 램핑 구간을 가질 수 있다. 도 6에서는 램프 신호(RMP)가 하나의 램핑 구간만을 포함하는 것으로 도시되었으나, 램프 신호(RMP)가 CDS에 이용되는 경우에는 리셋 램핑 구간, 또는 신호 램핑 구간 중 어느 하나의 구간이 예시된 것으로 이해될 수 있다.
파워 다운 신호(PD)는 모니터링 회로(200)를 구성하는 각 기능부들에 전원을 공급할 수 있다. 파워 다운 신호(PD)가 턴-다운되면 모니터링 회로(200)를 포함하는 전자 장치(도 1, 10)가 동작을 개시할 수 있고, 파워 다운 신호(PD)가 턴-온되면 모니터링 회로(200)를 포함하는 전자 장치(도 1, 10)의 동작은 중단될 수 있다. 본 개시에서, 램프 신호(RMP)의 공급, 및 모니터링 회로(200)의 램프 신호(RMP) 모니터링을 위해 파워 다운 신호(PD)는 턴-다운 된 상태라고 가정된다.
전원 신호(PWR)는 램프 신호(RMP)의 하나의 램핑 구간 동안에 턴-온될 수 있고, 램프 신호(RMP)의 불량 여부를 모니터링을 위해 모니터링 회로(200)의 각 구성을 동작시키는 동작 신호, 또는 전원 공급 신호로 이용될 수 있다. 일 예시로서, 전원 신호(PWR)는 시점 t18에서 턴-오프될 수 있고, 램프 신호(RMP)의 하나의 램핑 구간 동안의 모니터링 동작은 종료될 수 있다. 다음 램프 신호의 램핑 구간 모니터링을 위해서는, 전원 신호(PWR)의 턴-온이 요구될 수 있다.
시점 t11에서 전원 신호(PWR)가 턴-온 됨에 따라, 램프 신호(RMP)는 제1 램프 전압(VRAMP1)에서 제2 램프 전압(VRAMP2)으로 천이할 수 있다. 그러나, 이는 예시적인 실시예에 불과하고, 램프 신호(RMP)의 전압 레벨은 전원 신호(PWR)의 턴-온 전후로 동일할 수도 있다.
시점 t11에서 전원 신호(PWR)가 턴-온 됨에 따라, 미분기(210), 상한 비교기(250) 및 상한 비교기(270)에 전원이 공급될 수 있고, 미분 출력(DO), 제1 비교 출력(CO1) 미 제2 비교 출력(CO2)이 연속적으로 생성될 수 있다. 예를 들어, 램프 신호(RMP)가 제2 램프 전압(VRAMP2)을 유지함에 따라, 램프 신호(RMP)의 시간에 대한 전압 변화량은 점진적으로 감소할 수 있다.
미분 출력(DO)은 제1 및 제2 기준값(REF1, REF2) 사이로 정의되는 범위(R0) 내에 있을 것이 요구될 수 있다. 이와 같은 미분 출력(DO)의 전압 레벨을 모니터링하기 위하여, 모니터링 회로(200)는 제1 범위(R1)에 포함되는 제1 기준 전압(VREF1)을 상한으로서 사용하고, 제2 범위(R2)에 포함되는 제2 기준 전압(VREF2)을 하한으로서 사용하는 것이 요구될 수 있다. 이에 따라, 판별기(290)는 모니터링 회로(200)의 제1 및 제2 기준 전압(VREF1, VREF2)이 제1 및 제2 범위(R1, R2)에 각각 포함되는지 여부를 판정함으로써 램프 신호(RMP)의 불량 여부를 판별할 수 있다.
미분 출력(DO)은 제1 기준값(REF1)을 초과하는 값에서 제1 기준값(REF1)에 미달하는 값으로 강하될 수 있다. 미분 출력(DO)이 제1 기준값(REF1)과 교차하며 제1 기준값(REF1)보다 작아지는 시점에서, 제1 비교 출력(CO1)의 전압 레벨은 로직-하이 에서 로직-로우로 천이될 수 있다. 제2 비교 출력(CO2)은, 미분 출력(DO)이 제2 기준값(REF2)을 초과함에 따라, 전원 신호(PWR)의 공급 이후 로직-로우 레벨을 유지할 수 있다. 본 개시에서, 제1 기준값(REF1) 및 제2 기준값(REF2)은 특정한 전압 레벨로 설명되고 있으나, 제1 기준값(REF1) 및/또는 제2 기준값(REF2)은 일정한 전압 레벨의 범위를 포함할 수도 있다. 제1 기준값(REF1)은 제1 범위(R1)를 지칭할 수 있고, 제2 기준값(REF2)은 제2 범위(R2)를 지칭할 수 있으며, 제1 기준값(REF1) 및 제2 기준값(REF2) 각각은 미리 결정된 오차 허용 범위(예를 들어 5%)를 가질 수도 있다. 예를 들어, 미분 출력(DO)이 제1 기준값(REF1)의 1.05배의 전압 레벨을 통과함에 따라 상한 비교기(250)는 제1 비교 출력(CO1)을 턴-온할 수 있다.
시점 t12에서, 프리셋 신호(RST)가 턴-온될 수 있다. 프리셋 신호(PRST)는 미분기(210)의 양의 입력 단자와 음의 입력 단자 사이에 마련된 스위치(예를 들어, 트랜지스터(TR))의 온-오프를 제어할 수 있다. 프리셋 신호(RST)가 스위치을 턴-온 시켜 미분기(210)의 양의 입력 단자와 음의 입력 단자를 단락시킨다면, 미분기(210)의 전달 컨덕턴스는 상대적으로 매우 높아질 수 있고, 따라서 램프 전압(VRAMP)의 인가에 따른 미분 출력(DO)의 과도 상태는 비교적 빠르게 안정화될 수 있다. 도 6에서, 프리셋 신호(PRST)의 턴-온에 따라 미분기(210)가 빠르게 안정되는 동작은 프리셋 동작이라고 지칭될 수 있고, 프리셋 신호(PRST)의 턴-온되는 제1 구간(시점 t11에서 시점 t12까지)은 프리셋 구간이라고 지칭될 수 있다 시점 t13에서 프리셋 신호(RST)는 로직-로우(즉, 턴-오프)로 천이한다.
시점 t12와 시점 t13 사이에서 램프 신호(RMP)가 제2 램프 전압(VRAMP2)을 유지함에 따라, 램프 신호(RMP)의 시간에 대한 전압 변화량은 점진적으로 감소할 수 있고, 미분 출력(DO)은 제2 기준값(REF2)을 초과하는 값에서 제2 기준값(REF2)에 미달하는 값으로 강하될 수 있다. 미분 출력(DO)이 제2 기준값(REF2)과 교차하며 제2 기준값(REF2)보다 작아지는 시점에서, 제2 비교 출력(CO2)은 신호의 전압 레벨이 로직-로우에서 로직-하이로 천이될 수 있다.
시점 t12와 시점 t13 사이에서 램프 신호(RMP)가 일정하게 유지됨에 따라 미분 출력(DO)의 과도 상태는 빠르게 안정화된 후, 정상 상태(steady-state)로서 제0 기준값(REF0)에 도달할 수 있다. 제0 기준값(REF0)은 램프 신호(RMP)의 시간에 대한 전압 변화량이 실질적으로 0에 가까울 때의 미분 출력(DO) 값에 상응할 수 있다.시점 t13에서, 리셋 신호(RST)가 턴-온될 수 있다. 리셋 신호(RST)의 턴-온에 따라, 판별기(290)는 검증 신호(VFY)의 생성을 개시할 수 있다. 검증 신호(VFY)는 리셋 신호(RST)의 천이에 응답하여 턴-온될 수 있다.
본 개시에서는 검증 신호(VFY)의 로직-하이는 램프 신호(RMP)가 정상 임을, 의 로직-로우는 램프 신호(RMP)가 불량 임을 가정하나, 서로 반대의 로직 레벨을 이용하여 램프 신호(RMP)의 정상 여부를 판별할 수도 있다. 시점 t13과 시점 t14 사이에서, 리셋 신호(RST)는 다시 턴-오프될 수 있다.
시점 t14에서, 램프 신호(RMP)는 램핑을 시작할 수 있다. 예시적인 실시예에 따르면, 시점 t14에서 시점 t17까지 램프 신호(RMP)는 점진적으로 감소할 수 있으나, 이는 예시에 불과하고, 본 개시의 기술적 사상은 램프 신호(RMP)가 점진적으로 증가하는 것을 배제하지 않는다. 예시적인 실시예에 따라, 도 6에 도시된 램프 신호(RMP)의 램핑 구간은 리셋 램핑 구간, 및 신호 램핑 구간 중 어느 하나에 해당할 수 있다
시점 t14와 시점 t15 사이에서 램프 신호(RMP)가 일정한 기울기를 가짐에 따라, 미분 출력(DO)은 점진적으로 증가할 수 있다(과도 상태). 예시적인 실시예에 따르면, 미분 출력(DO)이 제2 기준값을 통과하며 제2 기준값보다 커지는 시점에서, 제2 비교 출력(CO2)의 전압 레벨은 로직-하이 에서 로직-로우로 천이될 수 있다. 제2 비교 출력(CO2)이 천이된 후, 미분 출력(DO)은 램프 신호(RMP)의 램핑 구간에 대한 기울기에 상응하는 일정 레벨에 도달할 수 있다(정상 상태).
시점 t15에서, 모니터링 신호(MNT)가 턴-온될 수 있다. 모니터링 신호(MNT)는 램프 신호(RMP)의 램핑이 시작한 시점부터 소정의 시간 후에 턴-온 됨으로써, 미분 출력(DO)을 과도 상태가 아닌 정상 상태에서 출력시킬 수 있다.
본 개시의 예시적인 실시예에 따르면, 판별기(290)는 모니터링 신호(MNT)가 턴-온됨에 따라, 검증 신호(VFY)를 출력할 수 있다. 판별기(290)는 제1 비교 출력(CO1) 및 제2 비교 출력(CO2)에 기초하여 램프 신호(RMP)의 기울기가 적정 범위(R0) 내에 위치하는지를 판별할 수 있고, 모니터링 신호(MNT)의 턴-온 시점에 판별 결과인 검증 신호(VFY)를 출력할 수 있다. 모니터링 신호(MNT)가 턴-온인 시점인 시점 t15와 시점 t16 사이는 제2 구간(모니터링 구간)이라고 지칭된다. 도 6에서는 램프 신호가 정상 범위(R0) 내에 위치함에 따라 모니터링 구간임에도 검증 신호(VFY)는 로직-하이를 유지할 수 있다. 예를 들면, 로직-하이인 검증 신호(VFY)는 램프 신호(RMP)가 정상이라고 해석될 수 있다.
본 개시에서 검증 신호(VFY)의 로직 레벨이 램프 신호(RMP)의 정상 여부를 지시하나, 본 개시의 기술적 사상은 이에 제한되지 않고, 정상 플래그 또는 불량 플래그를 생성하고 이를 출력 신호에 부착하는 실시예 등 다양한 실시예로서 정상 또는 불량 여부를 나타낼 수 있음이 이해될 수 있을 것이다.
시점 t17에서, 램프 신호(RMP)의 램핑은 종료되고, 램프 신호(RMP)는 종전의 전압 레벨(예를 들어, 제1 램프 전압(VRMP1))으로 회귀하거나, 또는 일정한 레벨(예를 들어, 제2 램프 전압(VRMP2)으로 천이할 수 있다.
시점 t18에서, 전원 신호(PWR)는 로직-로우로 천이될 수 있다. 전원 신호(PWR)가 턴-오프 됨에 따라, 모니터링 회로(200)의 각 기능부들에 공급되던 전원은 차단될 수 있고, 미분기(210), 상한 비교기(250), 상한 비교기(270) 및 판별기(290)의 동작은 중지될 수 있다. 상한 비교기(250) 및 상한 비교기(270)의 동작이 중단됨에 따라, 제1 비교 출력(CO1) 및 제2 비교 출력(CO2)은 초기 상태로 미리 설정된 로직-하이로 천이될 수 있다.
도 7은 본 개시의 예시적 실시예에 따라 전자 장치(10)의 동작의 예시를 나타내는 타이밍도이다. 도 7은 도 6의 타이밍도를 재구성한 것이므로, 도 6과 중복되는 설명은 생략된다. 도 1 및 도 3이 함께 참조된다.
시점 t21에서, 램프 전압(VRMP)을 유지하던 램프 신호(RMP)의 램핑 동작이 개시될 수 있다. 램프 신호(RMP)가 하강 램핑을 시작함에 따라, 미분 출력(DO)은 상승할 수 있다. 시점 t21과 시점 t22 사이에, 미분 출력(DO)은 제2 기준값(REF2)을 교차할 수 있으며, 미분 출력(DO)은 과도 상태일 수 있다. 모니터링 신호(MNT)는 초기값으로 로직-로우 상태를 가질 수 있으며, 검증 신호(VFY)는 초기값으로 로직-하이 상태를 가질 수 있다.
시점 t22에서, 미분 출력(DO)은 정상 상태에 도달할 수 있다. 예시적인 실시예에서, 미분 출력(DO)은 램프 신호(RMP)의 램핑 구간(t21~t26)에서의 기울기에 상응하는 전압 레벨에 도달할 수 있다. 미분 출력(DO)의 정상 상태에서의 값은 제1 기준값(REF1)보다 작고, 제2 기준값(REF2)보다 클 수 있다.
시점 t23에서, 모니터링 신호(MNT)가 턴-온 될 수 있다. 모니터링 신호(MNT)의 턴-온에 따라 검증 신호(VFY)가 생성 및 출력될 수 있다. 모니터링 신호(MNT)는 램프 신호(RMP)가 일정한 기울기를 유지할 때의 기울기를 산출하기 위해, 램프 신호(RMP)의 램핑이 시작된 후 소정의 시간 후 턴-온될 수 있다. 검증 신호(VFY)는 미분 출력(DO)이 제1 기준값(REF1)보다 작고, 제2 기준값(REF2)보다 큼에 따라 로직-하이 상태를 유지할 수 있다. 예시적인 실시예에 따라, 모니터링 회로(도 1, 15)는 램프 신호(RMP)가 정상임을 포함하는 정보를 제어기(도 1, 11)에 제공할 수 있다.
시점 t24에서, 모니터링 신호(MNT)가 턴-오프될 수 있다. 모니터링 신호(MNT)가 턴-오프됨에 응답하여, 검증 신호(VFY)의 출력은 중단될 수 있다. 모니터링 신호(MNT)는 램프 신호(RMP)가 일정한 기울기를 유지할 때의 기울기를 산출하기 위해, 램프 신호(RMP)의 램핑이 종료되기 이전에 미리 턴-오프될 수 있다.
시점 t25에서, 램프 신호(RMP)의 하강 램핑이 중단될 수 있다. 시점 t26 이후로 램프 신호(RMP)가 일정한 레벨을 유지할 수 있고, 미분 출력(DO)은 램프 신호(RMP)의 시간에 대한 전압 변화량이 거의 없음에 상응하는 전압 레벨로 다시 하강할 수 있다.
도 8a, 도 8b 및 도 8c는 본 개시의 예시적 실시예에 따라 전자 장치(10)의 동작의 예시를 나타내는 타이밍도이다. 도 8a, 도 8b 및 도 8c는 도 6의 타이밍도를 재구성한 것이다. 예시적인 실시예에서, 램프 생성기(도 1, 13)의 제조시에 결함이 발생했거나, 램프 생성기(13)에 실장된 전기적 소자에 불량이 발생하거나, 전기적 소자가 에이징에 따른 열화가 발생했거나, 전자 장치(도 1, 10)에 외부로부터 충격이 가해지는 등의 이유로 램프 신호(RMP)가 정상적으로 발생되지 않을 수 있다. 도 8a 내지 도 8c는 상기 언급된 문제로 인해 램프 신호(RMP)에 불량이 발생한 경우에 대한 실시예를 설명한다. 도 6 및 도 7과 중복되는 설명은 생략된다.
도 8a를 도 1과 함께 참조하면, 시점 t31에서, 램프 전압(VRMP)을 유지하던 램프 신호(RMP)의 램핑이 시작될 수 있다. 그러나, 램프 신호(RMP)의 기울기(실선)는, 도 7에서 도시된 램프 신호(RMP)의 기울기(점선)와 비교하여 상대적으로 작을 수 있다. 다시 말해, 램프 신호(RMP)의 램핑은 비정상적으로 느릴 수 있다. 시점 t31과 시점 t32 사이에서 램프 신호(RMP)가 하강 램핑을 시작함에 따라, 미분 출력(DO)은 상승할 수 있다(과도 상태).
시점 t32에서, 미분 출력(DO)은 정상 상태에 도달할 수 있다. 예시적인 실시예에서, 미분 출력(DO)은 램프 신호(RMP)의 램핑 구간(t31~t36)에서의 기울기에 상응하는 전압 레벨에 도달할 수 있다. 미분 출력(DO)의 정상 상태에서의 값은 제1 기준값(REF1) 및 제2 기준값(REF2)보다 작을 수 있다.
시점 t33에서, 모니터링 신호(MNT)가 턴-온 될 수 있다. 모니터링 신호(MNT)의 턴-온에 따라 검증 신호(VFY)의 변동이 시작될 수 있고, 검증 신호(VFY)가 출력될 수 있다. 모니터링 신호(MNT)가 로직-로우일 경우, 판별기(도 3, 290)는 판별 동작을 개시하지 않을 수 있고, 모니터링 신호(MNT)가 로직-하이일 경우, 판별기(290)는 검증 신호(VFY)의 생성을 개시할 수 있다.
모니터링 신호(MNT)가 로직-하이로 천이된 시점과 실질적으로 동일한 시간에, 검증 신호(VFY)는 로직-로우로 천이될 수 있다. 판별기(290)는 미분 출력(DO)이 제2 기준값보다 작음을 확인하고, 램프 신호(RMP)가 비정상(즉, 불량)임을 판별할 수 있고, 검증 신호(VFY)의 전압 레벨을 로직-하이에서 로직-로우로 변동시킬 수 있다.
생성된 검증 신호(VFY)는 외부로 출력될 수 있다. 예시적인 실시예에 따라, 모니터링 회로(도 1, 15)는 램프 신호(RMP)가 불량임을 포함하는 정보를 제어기(도 1, 11)에 제공할 수 있다. 예시적인 실시예에 따라, 제어기(11)는 검증 신호(VFY)가 로직-로우임에 따라 램프 신호(RMP)에 기반한 메인 회로(도 1, 17)의 동작을 중단시킬 수 있거나, 전자 장치(10)의 사용자에게 램프 신호(RMP)에 기반한 동작이 비정상임을 알릴 수 있다.
시점 t34에서, 모니터링 신호(MNT)가 턴-오프될 수 있다. 예시적인 실시예에 따르면, 모니터링 신호(MNT)가 턴-오프됨에 응답하더라도, 검증 신호(VFY)의 출력은 리셋 신호(RST)가 턴-온되기 전까지 유지될 수 있다. 검증 신호(VFY)는 모니터링 신호(MNT)의 턴-오프에도 출력이 유지되므로, 램프 신호(RMP)의 불량 여부 정보는 언제든 제공될 수 있다.
시점 t35에서, 램프 신호(RMP)의 하강 램핑이 중단될 수 있다. 시점 t36 이후로 램프 신호(RMP)가 일정한 레벨을 유지할 수 있고, 미분 출력(DO)은 램프 신호(RMP)의 시간에 대한 전압 변화량이 거의 없음에 상응하는 전압 레벨로 다시 하강할 수 있다.
도 8b를 도 1과 함께 참조하면, 시점 t41에서, 램프 전압(VRMP)을 유지하던 램프 신호(RMP)의 램핑이 시작될 수 있다. 그러나, 램프 신호(RMP)의 기울기(실선)는, 도 7에서 도시된 램프 신호(RMP)의 기울기(점선)와 비교하여 상대적으로 클 수 있다. 다시 말해, 램프 신호(RMP)의 램핑은 비정상적으로 빠를 수 있다. 시점 t41과 시점 t42 사이에서 램프 신호(RMP)가 하강 램핑을 시작함에 따라, 미분 출력(DO)은 상승할 수 있다(과도 상태).
시점 t42에서, 미분 출력(DO)은 정상 상태에 도달할 수 있다. 예시적인 실시예에서, 미분 출력(DO)은 램프 신호(RMP)의 램핑 구간(t41~t46)에서의 기울기에 상응하는 전압 레벨에 도달할 수 있다. 미분 출력(DO)의 정상 상태에서의 값은 제1 기준값(REF1) 및 제2 기준값(REF2)보다 클 수 있다.
시점 t43에서, 모니터링 신호(MNT)가 턴-온 될 수 있다. 모니터링 신호(MNT)의 턴-온에 따라 검증 신호(VFY)의 변동이 시작될 수 있고, 검증 신호(VFY)가 출력될 수 있다. 모니터링 신호(MNT)가 로직-로우일 경우, 판별기(290)는 판별 동작을 개시하지 않을 수 있고, 모니터링 신호(MNT)가 로직-하이일 경우, 판별기(290)는 검증 신호(VFY)의 생성을 개시할 수 있다. 모니터링 신호(MNT)가 로직-하이로 천이된 시점과 실질적으로 동일한 시간에, 판별기(290)는 미분 출력(DO)이 제1 기준값(REF1)보다 큼을 확인하고, 램프 신호(RMP)가 비정상(즉, 불량)임을 판별할 수 있다. 예시적인 실시예에서, 판별기(290)는 검증 신호(VFY)의 전압 레벨을 로직-하이에서 로직-로우로 변동시킬 수 있다.
생성된 검증 신호(VFY)는 외부로 출력될 수 있다. 예시적인 실시예에 따라, 모니터링 회로(15)는 램프 신호(RMP)가 불량임을 포함하는 정보를 제어기(11)에 제공할 수 있다. 예시적인 실시예에 따라, 제어기(11)는 검증 신호(VFY)가 로직-로우임에 따라 램프 신호(RMP)에 기반한 메인 회로(17)의 동작을 중단시킬 수 있거나, 전자 장치(10)의 사용자에게 램프 신호(RMP)에 기반한 동작이 비정상임을 알릴 수 있다.
시점 t44에서, 모니터링 신호(MNT)가 턴-오프될 수 있다. 예시적인 실시예에 따르면, 모니터링 신호(MNT)가 턴-오프됨에 응답하더라도, 검증 신호(VFY)의 출력은 리셋 신호(RST)가 턴-온되기 전까지 유지될 수 있다. 검증 신호(VFY)는 모니터링 신호(MNT)의 턴-오프에도 출력이 유지되므로, 램프 신호(RMP)의 불량 여부 정보는 언제든 제공될 수 있다.
시점 t45에서, 램프 신호(RMP)의 하강 램핑이 중단될 수 있다. 시점 t46 이후로 램프 신호(RMP)가 일정한 레벨을 유지할 수 있고, 미분 출력(DO)은 램프 신호(RMP)의 시간에 대한 전압 변화량이 거의 없음에 상응하는 전압 레벨로 다시 하강할 수 있다.
도 8c를 도 1과 함께 참조하면, 시점 t51에서, 램프 전압(VRMP)을 유지하던 램프 신호(RMP)의 램핑이 시작될 수 있다. 램프 신호(RMP)의 기울기(실선)는, 도 7에서 도시된 램프 신호(RMP)의 기울기(점선)와 비교하여 실질적으로 동일할 수 있다. 그러나, 램프 신호(RMP)는 목표 레벨까지 하강하지 못하고, 램핑 동작이 중도 종료될 수 있다. 다시 말해, 램프 신호(RMP)의 램핑 구간은 비정상적으로 짧을 수 있다. 시점 t51과 시점 t52 사이에서 램프 신호(RMP)가 하강 램핑을 시작함에 따라, 미분 출력(DO)은 상승할 수 있다(과도 상태).
시점 t52에서, 미분 출력(DO)은 정상 상태에 도달할 수 있다. 예시적인 실시예에서, 미분 출력(DO)은 램프 신호(RMP)의 램핑 구간(t51~t56)에서의 기울기에 상응하는 전압 레벨에 도달할 수 있다. 미분 출력(DO)의 정상 상태에서의 값은 제1 기준값(REF1)보다 작고, 제2 기준값(REF2)보다 클 수 있다.
시점 t53에서, 모니터링 신호(MNT)가 턴-온 될 수 있다. 모니터링 신호(MNT)가 턴-온 됨에 따라, 판별기(290)는 검증 동작을 개시할 수 있고, 생성된 검증 신호(VFY)는 외부로 출력될 수 있다. 판별기(290)는 미분 출력(DO)이 정상 동작 범위에 존재함에 따라, 램프 신호(RMP)를 정상으로 판별할 수 있다. 예시적인 실시예에서, 판별기(290)는 검증 신호(VFY)의 전압 레벨을 로직-하이로 유지할 수 있다.예시적인 실시예에 따라, 모니터링 회로(15)는 램프 신호(RMP)가 정상임을 포함하는 정보를 제어기(11)에 제공할 수 있 다.
시점 t54에서, 램프 신호(RMP)의 램핑 동작은 갑자기 중단될 수 있다. 예를 들어, 램프 생성기(13)가 외부로부터 충격을 받거나, 램프 생성기(13) 내부 회로 또는 소자가 고장이 난 경우, 램프 신호(RMP)는 적절하게 제공될 수 없다. 램프 신호(RMP)의 램핑 중단에 따라, 램프 신호(RMP)의 시간에 대한 전압 변화량은 변할 수 있고, 미분 출력(DO)은 점진적으로 감소할 수 있다.
시점 t55에서, 감소중인 미분 출력(DO)은 제2 기준값(REF2)을 교차하며 통과할 수 있다. 미분 출력(DO)이 제2 기준값(REF2)보다 작아짐에 따라, 판별기(290)는 검증 신호(VFY)를 로직-로우로 천이시킬 수 있다. 시점 t56에서 아직 모니터링 신호(MNT)는 턴-온 상태이므로, 검증 신호(VFY)는 외부로 출력될 수 있다. 예시적인 실시예에 따라, 모니터링 신호(MNT)의 턴-온 유지 시간(t54~t57)은 램프 생성기(13)의 소자 설계에 따라 결정되거나, 램프 신호(RMP)가 일정한 기울기를 가지는 램핑 구간을 적절히 판정하기 위해 램프 생성기(13)의 생산 또는 설계 단계에서 미리 설정될 수 있다. 따라서, 모니터링 신호(MNT)는 램프 신호(RMP)의 램핑이 중도에 중단됨에도 불구하고 미리 결정된 턴-온 유지 시간동안 턴-온 상태를 유지할 수 있다. 예시적인 실시예에 따라, 제어기(11)는 검증 신호(VFY)가 로직-로우임에 응답하여 램프 신호(RMP)에 기반한 메인 회로(17)의 동작을 중단시킬 수 있거나, 전자 장치(10)의 사용자에게 램프 신호(RMP)에 기반한 동작이 비정상임을 알릴 수 있다.
시점 t56에서, 미리 결정된 턴-온 유지 시간(t54~t57)이 도과됨에 따라, 모니터링 신호(MNT)가 턴-오프될 수 있다. 모니터링 신호(MNT)가 턴-오프됨에 응답하여, 검증 신호(VFY)의 출력은 중단될 수 있다.
도 9는 본 개시의 예시적 실시예에 따른 촬상 장치(20)를 나타내는 블록도이다. 촬상 장치(20)는 도 1에서 설명된 전자 장치(10)의 예시적 실시예일 수 있으다.
촬상 장치(20)는 이미지 또는 광 센싱 기능을 갖는 전자 기기에 탑재될 수 있다. 예를 들어, 촬상 장치(20)는 카메라, 스마트폰, 웨어러블 기기, 사물 인터넷(Internet of Things(IoT)) 기기, 가전 기기, 태블릿 PC(Personal Computer), PDA(Personal Digital Assistant), PMP(portable Multimedia Player), 네비게이션(navigation), 드론(drone), 첨단 운전자 보조 시스템(Advanced Drivers Assistance System; ADAS) 등과 같은 전자 기기에 탑재될 수 있다. 또한 촬상 장치(20)는 차량, 가구, 제조 설비, 도어, 각종 계측 기기 등에 부품으로서 구비되는 전자 기기에 탑재될 수 있다.
예시적 실시예에 따른 촬상 장치(20)는 촬상부(430), 이미지 센서(450) 및 프로세서(470)를 포함할 수 있다. 촬상 장치(20)는 자동 초점 검출 기능(auto focusing; 이하 AF 기능 이라고 함)을 구비할 수 있다.
촬상 장치(20)의 동작들은 프로세서(470)에 의해 제어될 수 있다. 프로세서(470)는 렌즈 구동부(433), 조리개 구동부(435), 제어부(451) 등에 각 구성 요소의 동작을 위한 제어 신호를 제공할 수 있다.
촬상부(430)는 광을 수신하는 구성 요소로서, 렌즈(431), 렌즈 구동부(433), 조리개(437), 조리개 구동부(435)를 포함할 수 있다. 렌즈(431)는 복수의 렌즈들을 구비할 수 있다.
렌즈 구동부(433)는 프로세서(470)와 초점 검출에 관한 정보를 통신할 수 있고, 프로세서(470)에서 제공된 제어 신호에 따라 렌즈(431)의 위치를 조절할 수 있다. 렌즈 구동부(433)는 렌즈(431)를 이동시킴으로써, 렌즈(431)의 위치를 조절할 수 있다. 예를 들어, 렌즈 구동부(433)는 렌즈(431)를 객체(405)로부터의 거리가 증가하는 방향 또는 감소하는 방향으로 이동시킬 수 있고, 렌즈(431)와 객체(405) 사이의 거리가 조절될 수 있다. 렌즈(431)의 위치에 따라 객체(405)에 대한 초점이 맞거나 흐려질 수 있다.
이미지 센서(450)는 입사되는 광을 이미지 신호로 변환할 수 있다. 이미지 센서(450)는 픽셀 어레이(453), 제어부(451), 신호 처리부(455) 및 모니터링 회로(457)를 포함할 수 있다. 렌즈(431) 및 조리개(437)를 투과한 광학 신호는 픽셀 어레이(453)의 수광면에 이르러 피사체의 상을 결상할 수 있다. 도 9의 모니터링 회로(457)로서 도 2의 모니터링 회로(100) 또는 도 3의 모니터링 회로(200)가 적용될 수 있으므로, 중복되는 설명은 생략된다.
픽셀 어레이(453)는 광학 신호를 전기 신호로 변환하는 CIS(Complementary Metal Oxide Semiconductor Image Sensor)일 수 있다. 이와 같은 픽셀 어레이(453)는 제어부(451)에 의해 감도 등이 조절될 수 있다. 픽셀 어레이(453)는 행열로 배치된 복수의 픽셀을 포함할 수 있으며, 복수의 픽셀 각각은 마이크로 렌즈 및 마이크로 렌즈 아래에 나란하게 배치된 적어도 두 개의 광전 변환 소자를 포함할 수 있다. 복수의 픽셀 각각은 나란하게 배치된 적어도 하나의 제1 광전 변환 소자 및 적어도 하나의 제2 광전 변환 소자를 포함할 수 있다. 픽셀은 제1 광전 변환 소자로부터 생성되는 제1 이미지 신호 또는 제2 광전 변환 소자로부터 생성되는 제2 이미지 신호를 출력할 수 있다. 또한, 픽셀은 제1 광전 변환 소자 및 제2 광전 변환 소자로부터 생성되는 합산 이미지 신호를 출력할 수 있다.
신호 처리부(455)는 픽셀 어레이(453) 상에서 인접한 서로 다른 로우(row) 및 동일한 컬럼에 배치되는 적어도 두 개의 픽셀에서 출력되는 제1 이미지 신호 및 제2 이미지 신호를 기초로, 위상차 연산에 이용되는 위상 검출 신호 쌍을 생성할 수 있다. 초점이 맞지 않을 때, 제1 이미지 신호 및 제2 이미지 신호의 위상이 상이할 수 있다. 예컨대, 제1 이미지 신호 및 제2 이미지 신호의 신호 세기가 상이할 수 있다. 초점이 맞을 때, 제1 이미지 신호 및 제2 이미지 신호의 위상이 동일할 수 있다.
신호 처리부(455)는 픽셀 어레이(453)로부터 출력되는 복수의 제1 이미지 신호 및 복수의 제2 이미지 신호를 기초로 복수의 위상 검출 신호 쌍을 생성할 수 있다. 복수의 위상 검출 신호 쌍, 또는 복수의 위상 검출 신호 쌍에 의하여 생성되는 제1 이미지 및 제2 이미지가 오토 포커싱 데이터로서 프로세서(470)로 제공될 수 있다.
프로세서(470)는 이미지 센서(450)로부터 이미지 데이터를 수신할 수 있다. 이미지 데이터는 프레임 단위의 이미지 및/또는 오토 포커싱 데이터를 포함할 수 있다. 프로세서(470)는 오토 포커싱 데이터를 이용하여 AF 기능을 위한 위상차 연산을 수행할 수 있다. 실시예에 있어서, 프로세서(470)는 오토 포커싱 데이터에 포함되는 복수의 위상 검출 신호 쌍을 기초로 위상차 연산을 수행할 수 있다. 예를 들어, 프로세서(470)는 복수의 위상 검출 신호 쌍 중 복수의 제1 위상 검출 신호를 기초로 제1 이미지를 생성하고 복수의 제2 위상 검출 신호를 기초로 제2 이미지를 생성하며, 제1 이미지와 제2 이미지 간 위상차를 산출할 수 있다.
프로세서(470)는 위상차 연산을 통해 위상 검출 신호 쌍에 포함되는 두 위상 검출 신호의 신호 세기(intensity)가 일치하는(다시 말해서 제1 이미지 및 제2 이미지의 위상이 일치하는) 초점의 위치, 초점의 방향 및/또는 객체와 이미지 센서(450) 사이의 거리 등을 구할 수 있다.
프로세서(470)는 위상차 연산 결과를 기초로 하여, 렌즈 구동부(433)가 렌즈(431)의 위치를 이동시키도록 제어하는 제어 신호를 생성하고, 제어 신호를 렌즈 구동부(433)로 출력할 수 있다.
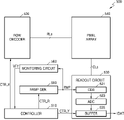
도 10은 본 개시의 예시적 실시예에 따른 이미지 센서(500)를 나타내는 블록도이다. 도 10의 이미지 센서(500)는 도 9의 이미지 센서(450)의 예시적 실시예일 수 있다.
도 10을 도 9와 함께 참조하면, 이미지 센서(500)는 제어기(510), 로우 디코더(520), 리드아웃 회로(530), 픽셀 어레이(540), 램프 생성기(550), 및 모니터링 회로(560)를 포함할 수 있다. 도 10에 도시되지는 않았으나, 이미지 센서(500)는 클럭 신호 생성기, 신호 처리기, 컬럼 디코더, 및/또는 메모리를 더 포함할 수 있음이 이해되어야 한다. 도 10의 모니터링 회로(560)로서 도 2의 모니터링 회로(100) 또는 도 3의 모니터링 회로(200)가 적용될 수 있으므로, 중복되는 설명은 생략된다.
제어기(510)는 로우 디코더(520), 리드아웃 회로(530) 및 램프 생성기(550)의 타이밍을 제어하는 제어 신호들을 제공할 수 있다. 예를 들어, 제어기(510)는 로우 디코더(520)에 행 제어 신호(CTR_X)를 제공할 수 있고, 로우 디코더(520) 는 행 제어 신호(CTR_X)에 기초하여 로우 라인들(RLs)을 통해 픽셀 어레이(540)를 행마다 센싱시킬 수 있다. 예를 들어, 제어기(510)는 리드아웃 회로(530)에 열 제어 신호(CTR_Y)를 제공할 수 있고, 리드아웃 회로(530)는 열 제어 신호(CTR_Y)에 기초하여 컬럼 라인들(CLs)을 통해 픽셀 어레이(540)로부터의 센싱 신호를 수신할 수 있다. 예를 들어, 제어기(510)는 램프 생성기(550)에 램프 신호를 제어하는 램프 제어 신호(CTR_R)를 제공할 수 있고, 램프 생성기(550)는 램프 제어 신호(CTR_R)에 기초하여 리드아웃 회로(530)의 동작을 위한 램프 신호(RMP)를 생성할 수 있다.
본 개시의 예시적인 실시예에 따르면, 제어기(510)는 모니터링 회로(560)로부터 검증 신호(VFY)를 수신함으로써, 램프 생성기(550)에서 생성된 램프 신호(RMP)의 비정상적 동작을 감지할 수 있다. 제어기(510)는 램프 신호(RMP)의 정상 범위 외의 동작, 또는 램프 생성기(550)의 불량을 판별할 수 있고, 그에 따라 램프 신호(RMP)에 기반하여 동작하는 리드아웃 회로(530)의 동작을 중단할 수 있다. 예를 들어, 리드아웃 회로(530)에서 수행되는 상관 이중 샘플링(CDS), 또는 카운팅 동작은 중단될 수 있고, 그에 따라 리드아웃 회로(530)가 생성하는 이미지 데이터(IDAT)의 출력은 중단될 수 있다.
제어기(510)는 로직 회로를 포함하는 하드웨어와 같은 처리 회로로서 구현될 수 있거나, 압축 동작을 수행하는 소프트 웨어를 실행하는 프로세서와 같이 하드웨어와 소프트웨어의 조합으로 구현 될 수 있다. 특히, 제어기(510)는 이미지 센서(500)에 포함된 중앙 처리 장치(Central Procesing Unit; CPU), 산술 및 논리 연산, 비트 쉬프트 등을 수행하는 ALU(Arithmetic Logic Unit), DSP(Digital Signal Processor), 마이크로프로세서(microprocessor), ASIC(Application Specific Integrated Circuit), 컨트롤 로직(control logic) 등으로 구현될 수 있으나, 이에 제한되지 않음은 전술된 바와 같다.
로우 디코더(520)는 제어기(510)의 제어(예를 들어, 행 제어 신호(CTR_X)) 하에, 픽셀 어레이(540)를 구동하기 위한 제어 신호들을 생성할 수 있고, 복수의 로우 라인들(RLs)을 통해 픽셀 어레이(540)의 복수의 픽셀을 행마다 구동시킬 수 있다. 복수의 로우 라인들(RLs) 각각은 행 방향으로 연장되며, 동일한 로우에 배치된 픽셀에 연결될 수 있다.
예시적인 실시예에서, 로우 디코더(520)는 픽셀 어레이(540)의 복수의 픽셀들이 동시에 또는 로우(row) 단위로 입사되는 광을 감지하도록 픽셀들을 제어할 수 있다. 또한 로우 디코더(520)는 복수의 픽셀들을 행 단위로 픽셀들을 선택하고, 선택된 픽셀들(예컨대 한 행의 픽셀들)이 생성하는 리셋 전압 및 센싱 전압을 복수의 컬럼 라인들(CLs)을 통해 출력하도록 제어할 수 있다.
픽셀 어레이(540)는 매트릭스 형태로 배열된 복수의 픽셀 및 복수의 픽셀에 접속되는 복수의 로우 라인들(RLs) 및 복수의 컬럼 라인들(CLs)을 포함할 수 있다. 예를 들어, 복수의 로우 라인들(RLs) 각각은 픽셀에 포함된 트랜지스터들 각각에 로우 디코더(520)로부터 출력되는 제어 신호들을 전송할 수 있으며, 복수의 컬럼 라인들(CLs) 각각은 픽셀 어레이(540)의 열 단위로 픽셀들의 픽셀 신호를 리드아웃 회로(530)에 전송할 수 있다. 복수의 컬럼 라인들(CLs) 각각은 컬럼 방향으로 연장되며, 동일한 컬럼에 배치된 픽셀과 리드아웃 회로(530)를 서로 연결할 수 있다.
예시적인 실시예에 따르면, 복수의 픽셀들 각각은 적어도 하나의 광전 변환 소자(또는 광 감지 소자) 및 트랜지스터를 포함할 수 있다. 광전 변환 소자는 빛을 감지하고, 감지된 빛을 광전하로 변환할 수 있다. 예를 들어, 광전 변환 소자는 무기 포토(photo) 다이오드, 유기 포토 다이오드, 페로브 스카이트 포토 다이오드, 포토 트랜지스터, 포토 게이트 또는 핀드 포토 다이오드(pinned photodiode) 등과 같이, 유기 물질 또는 무기 물질로 구성되는 광 감지 소자일 수 있다. 예시적 실시예에 있어서, 복수의 픽셀들 각각은 복수의 광전 변환 소자들을 포함할 수 있다. 트랜지스터는 광전 변환 소자에 저장된 전하를 전송시키거나, 전원 전압으로 리셋시키거나, 전하를 전기적 신호로 변환할 수 있다.
복수의 픽셀은 레드(red) 픽셀, 그린(green) 픽셀, 및 블루(blue) 픽셀을 포함할 수 있다. 레드 픽셀은, 가시광 영역 중에서 레드 영역의 파장들에 응답하여, 레드 컬러 신호에 상응하는 이미지 신호(또는 전하들)를 생성할 수 있다. 그린 픽셀은, 가시광 영역 중에서 그린 영역의 파장들에 응답하여, 그린 컬러 신호에 상응하는 이미지 신호(또는 전하들)를 생성할 수 있다. 블루 픽셀은, 가시광 영역 중에서 블루 영역의 파장들에 응답하여, 블루 컬러 신호에 상응하는 이미지 신호(또는 전하들)를 생성할 수 있다. 그러나, 이에 한정되는 것은 아니며, 복수의 픽셀은 화이트 픽셀을 더 포함할 수 있다. 다른 예로서, 복수의 픽셀은 시안(cyan) 픽셀, 옐로우(yellow) 픽셀, 마젠타(magenta) 픽셀, 또는 화이트 픽셀을 포함할 수도 있다.
복수의 픽셀 각각의 상부에는 마이크로 렌즈 및 컬러 필터가 적층될 수있으며, 복수의 픽셀의 복수의 컬러 필터가 컬러 필터 어레이를 구성할 수 있다. 컬러 필터는 마이크로 렌즈를 통해 입사되는 빛 중 특정 색상의 빛, 다시 말해서 특정 색상 영역의 파장을 투과시킬 수 있다. 픽셀에 구비되는 컬러 필터에 따라 픽셀이 감지할 수 있는 색상이 결정될 수 있다. 그러나, 이에 제한되는 것은 아니며, 실시예에 있어서, 픽셀에 구비되는 광전 변환 소자는 인가되는 전기 신호의 레벨, 예컨대 전압 레벨에 따라서, 색상 영역의 파장에 해당하는 빛을 전기적 신호로 변환할 수 있으며, 이에 따라서, 광전 변환 소자에 인가되는 전기 신호의 레벨에 따라서 픽셀이 감지할 수 있는 색상이 결정될 수도 있다.
리드아웃 회로(530)는 픽셀 어레이(540)로부터 출력된 픽셀 신호를 컬럼 라인들(CLs)을 통해 수신하고, 픽셀 신호를 처리하여 이미지 데이터(IDAT)로 출력할 수 있다. 리드아웃 회로(530)는 상관 이중 샘플링(CDS) 회로(531), 아날로그-디지털 컨버팅(ADC) 회로(533) 및 버퍼(535)를 포함할 수 있다.
상관 이중 샘플링 회로(531)는 복수의 비교기들을 포함할 수 있고, 복수의 컬럼 라인들(CLs)을 통해 픽셀 어레이(540)로부터 수신되는 픽셀 신호를 램프 생성기(550)로부터의 램프 신호(RMP)와 비교할 수 있다. 비교기는 수신되는 픽셀 신호를 버퍼링된 램프 신호(RMP)와 비교하고, 비교 결과를 로직 로우, 또는 로직 하이로 출력할 수 있다. 예시적인 실시예에서, 비교기는 램프 신호(RMP)의 레벨과 픽셀 신호의 레벨이 동일할 때, 제1 레벨(예컨대 로직-하이)에서 제2 레벨(예컨대 로직-로우)로 천이하는 비교 신호를 출력할 수 있다. 비교 신호의 레벨이 천이되는 시점은 픽셀 신호의 레벨에 따라 결정될 수 있다.
복수의 픽셀들로부터 출력되는 복수의 픽셀 신호는 각 픽셀마다 가지는 고유의 특성(예컨대, FPN(Fixed Pattern Noise) 등)에 의한 편차 및/또는 픽셀로부터 픽셀 신호를 출력하기 위한 로직(예컨대, 픽셀 내에서 광전 변환 소자에 저장된 전하를 출력하기 위한 트랜지스터들)의 특성 차이에 기인한 편차를 가질 수 있다. 이와 같이, 복수의 컬럼 라인들(CLs)을 통해 출력되는 복수의 픽셀 신호간의 편차를 보상하기 위하여, 픽셀 신호에 대하여 리셋 전압(또는 리셋 성분) 및 센싱 전압(또는 센싱 성분)를 구하고 그 차이(예컨대 전압 차이)를 유효한 신호 성분으로 추출하는 것을 상관 이중 샘플링(Correlated Double Sampling)이라고 한다. 비교기는 상관 이중 샘플링 기법이 적용된 비교 결과(예컨대 비교 출력)를 출력할 수 있다. 결과적으로, 상관 이중 샘플링 회로(531)는 상관 이중 샘플링(Correlated Double Sampling; CDS) 기법이 적용되는 비교 결과를 생성할 수 있다.
아날로그 디지털 컨버팅 회로(533)는 상관 이중 샘플링 회로(531)의 비교 결과를 디지털 데이터로 변환함으로써, 복수의 픽셀에 대응하는 픽셀값들을 로우(row) 단위로 생성 및 출력할 수 있다. 아날로그 디지털 컨버팅 회로(533)는 복수의 카운터들을 포함할 수 있다. 복수의 카운터들은 복수의 비교기들 각각의 출력에 연결되며, 비교기로부터 출력되는 비교 결과를 카운팅할 수 있다. 카운터는 리셋 신호를 센싱하는 리셋 변환 구간 및 센싱 신호를 센싱하는 이미지 변환 구간에 카운팅 클럭을 기초로 비교기로부터 출력되는 로직 하이 또는 로직 로우의 비교 결과를 카운팅할 수 있고, 카운팅 결과에 따른 디지털 데이터(예를 들어, 픽셀값)를 출력할 수 있다. 카운터는 래치 회로 및 연산 회로를 포함할 수 있다. 래치 회로는 비교기로부터 수신되는 비교 신호의 레벨이 천이되는 시점에 카운팅 클럭 신호로서 수신되는 코드 값을 래치할 수 있다. 래치 회로는 리셋 신호에 대응하는 코드 값, 예컨대 리셋 값 및 이미지 신호에 대응하는 코드 값, 예컨대 이미지 신호 값 각각을 래치할 수 있다. 연산 회로는 리셋 값과 이미지 신호 값을 연산하여, 픽셀의 리셋 레벨이 제거된 이미지 신호 값을 생성할 수 있다. 카운터는 리셋 레벨이 제거된 이미지 신호 값을 픽셀값으로서 출력할 수 있다. 그러나, 이에 제한되는 것은 아니며, 카운터는, 카운팅 클럭 신호를 기초로 카운트 값이 순차적으로 증가하는 업-카운터와 연산 회로, 또는 업/다운 카운터, 또는 비트-와이즈 인버젼 카운터(bit-wise inversion counter)로 구현될 수도 있다.
버퍼(535)는 아날로그 디지털 컨버팅 회로(533)로부터 출력되는 픽셀값을 각각 저장할 수 있다. 버퍼(535)는 각 로우마다의 디지털 데이터(예를 들어 픽셀값)을 저장할 수 있다. 예시적인 실시예에서, 버퍼(535)는 카운터로부터 출력되는 복수의 디지털 데이터들을 임시 저장한 후, 증폭하여 출력할 수 있다. 즉, 버퍼(535)는 출력 버퍼일 수 있다. 버퍼(535)는 복수의 카운터 각각으로부터 출력되는 디지털 데이터를 임시 저장한 후 차례로 또는 선택적으로 센스 앰프(미도시)로 출력할 수 있으며, 센스 앰프는 수신되는 디지털 데이터를 증폭하여 출력할 수 있다. 버퍼(535)는 제어기(510)의 제어에 따라 컬럼을 선택하는 컬럼 디코더(미도시)의 열 제어 신호(CTR_Y)에 기초하여 증폭된 이미지 데이터(IDAT)를 외부로 출력할 수 있다.
버퍼(535)는 SRAM (static random access memory), 래치(latch), 플립-플롭(flipflop), 또는 이들의 결합으로 구현될 수 있으나 이에 한정되는 것은 아니다. 예시적인 실시예에 있어서, 버퍼(535)는 메모리로서 아날로그 디지털 컨버팅 회로(533) 내부에 포함될 수도 있다.
램프 생성기(550)는 소정의 기울기를 가지며 점진적으로 증가 또는 감소하는 램프 신호(RMP)를 생성하고, 램프 신호(RMP)를 리드아웃 회로(530)에 제공할 수 있다.
모니터링 회로(560)는 램프 신호(RMP)의 기울기를 산출하고, 기울기가 정상 범위 내인지 여부에 따라 램프 신호(RMP)의 정상 여부를 판별할 수 있다. 램프 신호(RMP)의 판별 결과는 검증 신호(VFY)로서 제어기(510)로 제공될 수 있다. 본 개시의 예시적인 실시예에 따르면, 제어기(510)는 검증 신호(VFY)가 램프 신호(RMP)의 불량을 지시하는 경우, 버퍼(535)가 이미지 데이터(IDAT)의 출력을 제한하도록 열 제어 신호(CTR_Y)를 출력할 수 있고, 램프 신호(RMP)에 기반하는 리드아웃 회로(530)의 동작을 제한할 수 있으며, 이미지 데이터(IDAT)에 기반한 각종 동작 모드의 운영을 중단시킬 수 있다.
도 11은 본 개시의 예시적 실시예에 따른 이미지 센서가 적용되는 멀티 카메라 모듈을 포함하는 전자 장치의 블록도이고, 도 12는 도 11의 멀티 카메라 모듈의 상세 블록도이다.
도 11를 참조하면, 전자 장치(1000)는 카메라 모듈 그룹(1100), 애플리케이션 프로세서(1200), PMIC(1300) 및 외부 메모리(1400)를 포함할 수 있다.
카메라 모듈 그룹(1100)은 복수의 카메라 모듈(1100a, 1100b, 1100c)을 포함할 수 있다. 비록 도면에는 3개의 카메라 모듈(1100a, 1100b, 1100c)이 배치된 실시예가 도시되어 있으나, 실시예들이 이에 제한되는 것은 아니다. 몇몇 실시예에서, 카메라 모듈 그룹(1100)은 2개의 카메라 모듈만을 포함하도록 변형되어 실시될 수 있다. 또한, 몇몇 실시예에서, 카메라 모듈 그룹(1100)은 n개(n은 4 이상의 자연수)의 카메라 모듈을 포함하도록 변형되어 실시될 수도 있다.
이하, 도 12을 참조하여, 카메라 모듈(1100b)의 상세 구성에 대해 보다 구체적으로 설명할 것이나, 이하의 설명은 실시예에 따라 다른 카메라 모듈들(1100a, 1100b)에 대해서도 동일하게 적용될 수 있다.
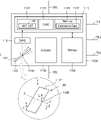
도 12을 참조하면, 카메라 모듈(1100b)은 프리즘(1105), 광학 경로 폴딩 요소(Optical Path Folding Element, 이하, ˝OPFE˝)(1110), 액츄에이터(1130), 이미지 센싱 장치(1140) 및 스토리지(1150)를 포함할 수 있다.
프리즘(1105)은 광 반사 물질의 반사면(1107)을 포함하여 외부로부터 입사되는 광(L)의 경로를 변형시킬 수 있다.
몇몇 실시예에서, 프리즘(1105)은 제1 방향(X)으로 입사되는 광(L)의 경로를 제1 방향(X)에 수직인 제2 방향(Y)으로 변경시킬 수 있다. 또한, 프리즘(1105)은 광 반사 물질의 반사면(1107)을 중심축(1106)을 중심으로 A방향으로 회전시키거나, 중심축(1106)을 B방향으로 회전시켜 제1 방향(X)으로 입사되는 광(L)의 경로를 수직인 제2 방향(Y)으로 변경시킬 수 있다. 이때, OPFE(1110)도 제1 방향(X)및 제2 방향(Y)과 수직인 제3 방향(Z)로 이동할 수 있다.
몇몇 실시예에서, 도시된 것과 같이, 프리즘(1105)의 A방향 최대 회전 각도는 플러스(+) A방향으로는 15도(degree) 이하이고, 마이너스(-) A방향으로는 15도보다 클 수 있으나, 실시예들이 이에 제한되는 것은 아니다.
몇몇 실시예에서, 프리즘(1105)은 플러스(+) 또는 마이너스(-) B방향으로 20도 내외, 또는 10도에서 20도, 또는 15도에서 20도 사이로 움직일 수 있고, 여기서, 움직이는 각도는 플러스(+) 또는 마이너스(-) B방향으로 동일한 각도로 움직이거나, 1도 내외의 범위로 거의 유사한 각도까지 움직일 수 있다.
몇몇 실시예에서, 프리즘(1105)은 광 반사 물질의 반사면(1107)을 중심축(1106)의 연장 방향과 평행한 제3 방향(예를 들어, Z방향)으로 이동할 수 있다.
OPFE(1110)는 예를 들어 m(여기서, m은 자연수)개의 그룹으로 이루어진 광학 렌즈를 포함할 수 있다. m개의 렌즈는 제2 방향(Y)으로 이동하여 카메라 모듈(1100b)의 광학 줌 배율(optical zoom ratio)을 변경할 수 있다. 예를 들어, 카메라 모듈(1100b)의 기본 광학 줌 배율을 Z라고할 때, OPFE(1110)에 포함된 m개의 광학 렌즈를 이동시킬 경우, 카메라 모듈(1100b)의 광학 줌 배율은 3Z 또는 5Z, 또는 5Z 이상의 광학 줌 배율로 변경될 수 있다.
액츄에이터(1130)는 OPFE(1110) 또는 광학 렌즈(이하, 광학 렌즈로 지칭)를 특정 위치로 이동시킬 수 있다. 예를 들어 액츄에이터(1130)는 정확한 센싱을 위해 이미지 센서(1142)가 광학 렌즈의 초점 거리(focal length)에 위치하도록 광학 렌즈의 위치를 조정할 수 있다.
이미지 센싱 장치(1140)는 이미지 센서(1142), 제어 로직(1144) 및 메모리(1146)를 포함할 수 있다. 이미지 센서(1142)는 광학 렌즈를 통해 제공되는 광(L)을 이용하여 센싱 대상의 이미지를 센싱할 수 있다.
본 개시의 예시적인 실시예에 따르면, 이미지 센서(1142)는 모니터링 회로(1143)를 포함할 수 있다. 도 12에 도시된 이미지 센서(1142)는 도 10에 도시된 이미지 센서(500)와 실질적으로 동일할 수 있고, 도 12에 도시된 모니터링 회로는 도 2의 모니터링 회로(100) 또는 도 3의 모니터링 회로(300)와 실질적으로 동일할 수 있으므로, 배치되지 않는 범위 내에서 중복되는 설명은 생략된다.
제어 로직(1144)은 카메라 모듈(1100b)의 전반적인 동작을 제어할 수 있다. 예를 들어, 제어 로직(1144)은 제어 신호 라인(CSLb)을 통해 제공된 제어 신호에 따라 카메라 모듈(1100b)의 동작을 제어할 수 있다.
메모리(1146)는 캘리브레이션 데이터(1147)와 같은 카메라 모듈(1100b)의 동작에 필요한 정보를 저장할 수 있다. 캘리브레이션 데이터(1147)는 카메라 모듈(1100b)이 외부로부터 제공된 광(L)을 이용하여 이미지 데이터를 생성하는데 필요한 정보를 포함할 수 있다. 캘리브레이션 데이터(1147)는 예를 들어, 앞서 설명한 회전도(degree of rotation)에 관한 정보, 초점 거리(focal length)에 관한 정보, 광학 축(optical axis)에 관한 정보 등을 포함할 수 있다. 카메라 모듈(1100b)이 광학 렌즈의 위치에 따라 초점 거리가 변하는 멀티 스테이트(multi state) 카메라 형태로 구현될 경우, 캘리브레이션 데이터(1147)는 광학 렌즈의 각 위치별(또는 스테이트별) 초점 거리 값과 오토 포커싱(auto focusing)과 관련된 정보를 포함할 수 있다.
스토리지(1150)는 이미지 센서(1142)를 통해 센싱된 이미지 데이터를 저장할 수 있다. 스토리지(1150)는 이미지 센싱 장치(1140)의 외부에 배치될 수 있으며, 이미지 센싱 장치(1140)를 구성하는 센서 칩과 스택된(stacked) 형태로 구현될 수 있다. 몇몇 실시예에서, 스토리지(1150)는 EEPROM(Electrically Erasable Programmable Read-Only Memory)으로 구현될 수 있으나 실시예들이 이에 제한되는 것은 아니다.
도 11과 도 12을 함께 참조하면, 몇몇 실시예에서, 복수의 카메라 모듈(1100a, 1100b, 1100c) 각각은 액츄에이터(1130)를 포함할 수 있다. 이에 따라, 복수의 카메라 모듈(1100a, 1100b, 1100c) 각각은 그 내부에 포함된 액츄에이터(1130)의 동작에 따른 서로 동일하거나 서로 다른 캘리브레이션 데이터(1147)를 포함할 수 있다.
몇몇 실시예에서, 복수의 카메라 모듈(1100a, 1100b, 1100c) 중 하나의 카메라 모듈(예를 들어, 1100b)은 앞서 설명한 프리즘(1105)과 OPFE(1110)를 포함하는 폴디드 렌즈(folded lens) 형태의 카메라 모듈이고, 나머지 카메라 모듈들(예를 들어, 1100a, 1100b)은 프리즘(1105)과 OPFE(1110)가 포함되지 않은 버티칼(vertical) 형태의 카메라 모듈일 수 있으나, 실시예들이 이에 제한되는 것은 아니다.
몇몇 실시예에서, 복수의 카메라 모듈(1100a, 1100b, 1100c) 중 하나의 카메라 모듈(예를 들어, 1100c)은 예를 들어, IR(Infrared Ray)을 이용하여 깊이(depth) 정보를 추출하는 버티컬 형태의 깊이 카메라(depth camera)일 수 있다. 이 경우, 애플리케이션 프로세서(1200)는 이러한 깊이 카메라로부터 제공받은 이미지 데이터와 다른 카메라 모듈(예를 들어, 1100a 또는 1100b)로부터 제공받은 이미지 데이터를 병합(merge)하여 3차원 깊이 이미지(3D depth image)를 생성할 수 있다.
몇몇 실시예에서, 복수의 카메라 모듈(1100a, 1100b, 1100c) 중 적어도 두 개의 카메라 모듈(예를 들어, 1100a, 1100b)은 서로 다른 관측 시야(Field of View, 시야각)를 가질 수 있다. 이 경우, 예를 들어, 복수의 카메라 모듈(1100a, 1100b, 1100c) 중 적어도 두 개의 카메라 모듈(예를 들어, 1100a, 1100b)의 광학 렌즈가 서로 다를 수 있으나, 이에 제한되는 것은 아니다.
또한, 몇몇 실시예에서, 복수의 카메라 모듈(1100a, 1100b, 1100c) 각각의 시야각은 서로 다를 수 있다. 이 경우, 복수의 카메라 모듈(1100a, 1100b, 1100c) 각각에 포함된 광학 렌즈 역시 서로 다를 수 있으나, 이에 제한되는 것은 아니다.
몇몇 실시예에서, 복수의 카메라 모듈(1100a, 1100b, 1100c) 각각은 서로 물리적으로 분리되어 배치될 수 있다. 즉, 하나의 이미지 센서(1142)의 센싱 영역을 복수의 카메라 모듈(1100a, 1100b, 1100c)이 분할하여 사용하는 것이 아니라, 복수의 카메라 모듈(1100a, 1100b, 1100c) 각각의 내부에 독립적인 이미지 센서(1142)가 배치될 수 있다.
다시 도 11를 참조하면, 애플리케이션 프로세서(1200)는 이미지 처리 장치(1210), 메모리 컨트롤러(1220), 내부 메모리(1230)를 포함할 수 있다. 애플리케이션 프로세서(1200)는 복수의 카메라 모듈(1100a, 1100b, 1100c)과 분리되어 구현될 수 있다. 예를 들어, 애플리케이션 프로세서(1200)와 복수의 카메라 모듈(1100a, 1100b, 1100c)은 별도의 반도체 칩으로 서로 분리되어 구현될 수 있다.
이미지 처리 장치(1210)는 복수의 서브 이미지 프로세서(1212a, 1212b, 1212c), 이미지 생성기(1214) 및 카메라 모듈 컨트롤러(1216)를 포함할 수 있다.
이미지 처리 장치(1210)는 복수의 카메라 모듈(1100a, 1100b, 1100c)의 개수에 대응하는 개수의 복수의 서브 이미지 프로세서(1212a, 1212b, 1212c)를 포함할 수 있다.
각각의 카메라 모듈(1100a, 1100b, 1100c)로부터 생성된 이미지 데이터는 서로 분리된 이미지 신호 라인(ISLa, ISLb, ISLc)를 통해 대응되는 서브 이미지 프로세서(1212a, 1212b, 1212c)에 제공될 수 있다. 예를 들어, 카메라 모듈(1100a)로부터 생성된 이미지 데이터는 이미지 신호 라인(ISLa)을 통해 서브 이미지 프로세서(1212a)에 제공되고, 카메라 모듈(1100b)로부터 생성된 이미지 데이터는 이미지 신호 라인(ISLb)을 통해 서브 이미지 프로세서(1212b)에 제공되고, 카메라 모듈(1100c)로부터 생성된 이미지 데이터는 이미지 신호 라인(ISLc)을 통해 서브 이미지 프로세서(1212c)에 제공될 수 있다. 이러한 이미지 데이터 전송은 예를 들어, MIPI(Mobile Industry Processor Interface)에 기반한 카메라 직렬 인터페이스(CSI; Camera Serial Interface)를 이용하여 수행될 수 있으나, 실시예들이 이에 제한되는 것은 아니다.
한편, 몇몇 실시예에서, 하나의 서브 이미지 프로세서가 복수의의 카메라 모듈에 대응되도록 배치될 수도 있다. 예를 들어, 서브 이미지 프로세서(1212a)와 서브 이미지 프로세서(1212c)가 도시된 것처럼 서로 분리되어 구현되는 것이 아니라 하나의 서브 이미지 프로세서로 통합되어 구현되고, 카메라 모듈(1100a)과 카메라 모듈(1100c)로부터 제공된 이미지 데이터는 선택 소자(예를 들어, 멀티플렉서) 등을 통해 선택된 후, 통합된 서브 이미지 프로세서에 제공될 수 있다.
각각의 서브 이미지 프로세서(1212a, 1212b, 1212c)에 제공된 이미지 데이터는 이미지 생성기(1214)에 제공될 수 있다. 이미지 생성기(1214)는 이미지 생성 정보(Generating Information) 또는 모드 신호(Mode Signal)에 따라 각각의 서브 이미지 프로세서(1212a, 1212b, 1212c)로부터 제공된 이미지 데이터를 이용하여 출력 이미지를 생성할 수 있다.
구체적으로, 이미지 생성기(1214)는 이미지 생성 정보 또는 모드 신호에 따라, 서로 다른 시야각을 갖는 카메라 모듈들(1100a, 1100b, 1100c)로부터 생성된 이미지 데이터 중 적어도 일부를 병합(merge)하여 출력 이미지를 생성할 수 있다. 또한, 이미지 생성기(1214)는 이미지 생성 정보 또는 모드 신호에 따라, 서로 다른 시야각을 갖는 카메라 모듈들(1100a, 1100b, 1100c)로부터 생성된 이미지 데이터 중 어느 하나를 선택하여 출력 이미지를 생성할 수 있다.
몇몇 실시예에서, 이미지 생성 정보는 줌 신호(zoom signal or zoom factor)를 포함할 수 있다. 또한, 몇몇 실시예에서, 모드 신호는 예를 들어, 유저(user)로부터 선택된 모드에 기초한 신호일 수 있다.
이미지 생성 정보가 줌 신호(줌 팩터)이고, 각각의 카메라 모듈(1100a, 1100b, 1100c)이 서로 다른 관측 시야(시야각)를 갖는 경우, 이미지 생성기(1214)는 줌 신호의 종류에 따라 서로 다른 동작을 수행할 수 있다. 예를 들어, 줌 신호가 제1 신호일 경우, 카메라 모듈(1100a)로부터 출력된 이미지 데이터와 카메라 모듈(1100c)로부터 출력된 이미지 데이터를 병합한 후, 병합된 이미지 신호와 병합에 사용하지 않은 카메라 모듈(1100b)로부터 출력된 이미지 데이터를 이용하여, 출력 이미지를 생성할 수 있다. 만약, 줌 신호가 제1 신호와 다른 제2 신호일 경우, 이미지 생성기(1214)는 이러한 이미지 데이터 병합을 수행하지 않고, 각각의 카메라 모듈(1100a, 1100b, 1100c)로부터 출력된 이미지 데이터 중 어느 하나를 선택하여 출력 이미지를 생성할 수 있다. 하지만 실시예들이 이에 제한되는 것은 아니며, 필요에 따라 이미지 데이터를 처리하는 방법은 얼마든지 변형되어 실시될 수 있다.
몇몇 실시예에서, 이미지 생성기(1214)는 복수의 서브 이미지 프로세서(1212a, 1212b, 1212c) 중 적어도 하나로부터 노출 시간이 상이한 복수의 이미지 데이터를 수신하고, 복수의 이미지 데이터에 대하여 HDR(high dynamic range) 처리를 수행함으로서, 다이나믹 레인지가 증가된 병합된 이미지 데이터를 생성할 수 있다.
카메라 모듈 컨트롤러(1216)는 각각의 카메라 모듈(1100a, 1100b, 1100c)에 제어 신호를 제공할 수 있다. 카메라 모듈 컨트롤러(1216)로부터 생성된 제어 신호는 서로 분리된 제어 신호 라인(CSLa, CSLb, CSLc)를 통해 대응되는 카메라 모듈(1100a, 1100b, 1100c)에 제공될 수 있다.
복수의 카메라 모듈(1100a, 1100b, 1100c) 중 어느 하나는 줌 신호를 포함하는 이미지 생성 정보 또는 모드 신호에 따라 마스터(master) 카메라(예를 들어, 1100b)로 지정되고, 나머지 카메라 모듈들(예를 들어, 1100a, 1100c)은 슬레이브(slave) 카메라로 지정될 수 있다. 이러한 정보는 제어 신호에 포함되어, 서로 분리된 제어 신호 라인(CSLa, CSLb, CSLc)를 통해 대응되는 카메라 모듈(1100a, 1100b, 1100c)에 제공될 수 있다.
줌 팩터 또는 동작 모드 신호에 따라 마스터 및 슬레이브로서 동작하는 카메라 모듈이 변경될 수 있다. 예를 들어, 카메라 모듈(1100a)의 시야각이 카메라 모듈(1100b)의 시야각보다 넓고, 줌 팩터가 낮은 줌 배율을 나타낼 경우, 카메라 모듈(1100b)이 마스터로서 동작하고, 카메라 모듈(1100a)이 슬레이브로서 동작할 수 있다. 반대로, 줌 팩터가 높은 줌 배율을 나타낼 경우, 카메라 모듈(1100a)이 마스터로서 동작하고, 카메라 모듈(1100b)이 슬레이브로서 동작할 수 있다.
몇몇 실시예에서, 카메라 모듈 컨트롤러(1216)로부터 각각의 카메라 모듈(1100a, 1100b, 1100c)에 제공되는 제어 신호는 싱크 인에이블 신호(sync enable) 신호를 포함할 수 있다. 예를 들어, 카메라 모듈(1100b)이 마스터 카메라이고, 카메라 모듈들(1100a, 1100c)이 슬레이브 카메라인 경우, 카메라 모듈 컨트롤러(1216)는 카메라 모듈(1100b)에 싱크 인에이블 신호를 전송할 수 있다. 이러한 싱크 인에이블 신호를 제공받은 카메라 모듈(1100b)은 제공받은 싱크 인에이블 신호를 기초로 싱크 신호(sync signal)를 생성하고, 생성된 싱크 신호를 싱크 신호 라인(SSL)을 통해 카메라 모듈들(1100a, 1100c)에 제공할 수 있다. 카메라 모듈(1100b)과 카메라 모듈들(1100a, 1100c)은 이러한 싱크 신호에 동기화되어 이미지 데이터를 애플리케이션 프로세서(1200)에 전송할 수 있다.
몇몇 실시예에서, 카메라 모듈 컨트롤러(1216)로부터 복수의 카메라 모듈(1100a, 1100b, 1100c)에 제공되는 제어 신호는 모드 신호에 따른 모드 정보를 포함할 수 있다. 이러한 모드 정보에 기초하여 복수의 카메라 모듈(1100a, 1100b, 1100c)은 센싱 속도와 관련하여 제1 동작 모드 및 제2 동작 모드로 동작할 수 있다.
복수의 카메라 모듈(1100a, 1100b, 1100c)은 제1 동작 모드에서, 제1 속도로 이미지 신호를 생성(예를 들어, 제1 프레임 레이트의 이미지 신호를 생성)하여 이를 제1 속도보다 높은 제2 속도로 인코딩(예를 들어, 제1 프레임 레이트보다 높은 제2 프레임 레이트의 이미지 신호를 인코딩)하고, 인코딩된 이미지 신호를 애플리케이션 프로세서(1200)에 전송할 수 있다. 이때, 제2 속도는 제1 속도의 30배 이하일 수 있다.
애플리케이션 프로세서(1200)는 수신된 이미지 신호, 다시 말해서 인코딩된 이미지 신호를 내부에 구비되는 메모리(1230) 또는 애플리케이션 프로세서(1200) 외부 메모리(1400)에 저장하고, 이후, 메모리(1230) 또는 외부 메모리(1400)로부터 인코딩된 이미지 신호를 독출하여 디코딩하고, 디코딩된 이미지 신호에 기초하여 생성되는 이미지 데이터를 디스플레이할 수 있다. 예컨대 이미지 처리 장치(1210)의 복수의 서브 프로세서들(1212a, 1212b, 1212c) 중 대응하는 서브 프로세서가 디코딩을 수행할 수 있으며, 또한 디코딩된 이미지 신호에 대하여 이미지 처리를 수행할 수 있다.
복수의 카메라 모듈(1100a, 1100b, 1100c)은 제2 동작 모드에서, 제1 속도보다 낮은 제3 속도로 이미지 신호를 생성(예를 들어, 제1 프레임 레이트보다 낮은 제3 프레임 레이트의 이미지 신호를 생성)하고, 이미지 신호를 애플리케이션 프로세서(1200)에 전송할수 있다. 애플리케이션 프로세서(1200)에 제공되는 이미지 신호는 인코딩되지 않은 신호일 수 있다. 애플리케이션 프로세서(1200)는 수신되는 이미지 신호에 대하여 이미지 처리를 수행하거나 또는 이미지 신호를 메모리(1230) 또는 외부 메모리(1400)에 저장할 수 있다.
PMIC(1300)는 복수의 카메라 모듈(1100a, 1100b, 1100c) 각각에 전력, 예컨대 전원 전압을 공급할 수 있다. 예를 들어, PMIC(1300)는 애플리케이션 프로세서(1200)의 제어 하에, 전원 신호 라인(PSLa)을 통해 카메라 모듈(1100a)에 제1 전력을 공급하고, 전원 신호 라인(PSLb)을 통해 카메라 모듈(1100b)에 제2 전력을 공급하고, 전원 신호 라인(PSLc)을 통해 카메라 모듈(1100c)에 제3 전력을 공급할 수 있다.
PMIC(1300)는 애플리케이션 프로세서(1200)로부터의 전력 제어 신호(PCON)에 응답하여, 복수의 카메라 모듈(1100a, 1100b, 1100c) 각각에 대응하는 전력을 생성하고, 또한 전력의 레벨을 조정할 수 있다. 전력 제어 신호(PCON)는 복수의 카메라 모듈(1100a, 1100b, 1100c)의 동작 모드 별 전력 조정 신호를 포함할 수 있다. 예를 들어, 동작 모드는 저전력 모드(low power mode)를 포함할 수 있으며, 이때, 전력 제어 신호(PCON)는 저전력 모드로 동작하는 카메라 모듈 및 설정되는 전력 레벨에 대한 정보를 포함할 수 있다. 복수의 카메라 모듈(1100a, 1100b, 1100c) 각각에 제공되는 전력들의 레벨은 서로 동일하거나 또는 서로 상이할 수 있다. 또한, 전력의 레벨은 동적으로 변경될 수 있다.
도 13은 본 개시의 예시적인 실시예에 따른 전자 장치의 동작 방법을 나타내는 흐름도이다. 도 1 및 도 3이 도 13과 함께 참조된다.
단계 S11에서, 전자 장치는 모니터링 회로를 인에이블할 수 있다. 예를 들어, 전자 장치(도 1, 10)은 모니터링 회로(도 1, 15)를 인에이블할 수 있다. 모니터링 회로는 전원이 공급됨으로써 인에이블될 수 있다. 예를 들어, 모니터링 회로(도 3, 200)에 공급되는 전원 신호(PWR)가 턴-온됨으로써 모니터링 회로(200)의 각 구성들은 인에이블될 수 있다.
단계 S13에서, 전자 장치는 미분기를 프리셋할 수 있다. 예를 들어, 전자 장치(10)는 미분기(도 3, 210)에 공급되는 프리셋 신호(PRST)를 턴-온 함으로써 미분기(210)를 프리셋할 수 있다. 미분기(210)가 프리셋됨에 따라, 앰프(도 3, AMP)의 전달 컨덕턴스는 높아질 수 있고, 미분기(210)의 과도 상태는 빠르게 안정될 수 있다.
단계 S15에서, 전자 장치는 판별기를 리셋할 수 있다. 예를 들어, 전자 장치(10)는 판별기(도 3, 290)에 공급되는 리셋 신호(RST)를 턴-온 함으로써 판별기(290)를 리셋시킬 수 있다. 판별기(290)가 리셋됨에 따라, 제1 비교 출력 전압(VCO1) 및/또는 제2 비교 출력 전압(VCO2)의 판별 동작이 시작될 수 있다.
단계 S17에서, 전자 장치는 램프 신호를 모니터링할 수 있다. 예를 들어, 전자 장치(10)는 램프 전압(도 3, VRAMP)의 기울기를 산출한 결과인 미분 출력 전압(VDO)을 생성하고, 미분 출력 전압(VDO)이 제1 기준 전압(VREF1) 또는 제2 기준 전압(VREF2)의 범위 내에 있는지를 판별할 수 있다. 전자 장치는 램프 신호를 모니터링한 결과를 출력하기 위해 모니터링 신호(MNT)를 생성할 수 있다.
단계 S19에서, 전자 장치는 검증 신호를 생성할 수 있다. 예를 들어, 전자 장치는 모니터링 신호(MNT)의 턴-온 구간 동안에, 검증 신호(VFY)를 출력할 수 있다. 검증 신호(VFY)는 제어기로 제공될 수 있다. 예를 들어, 제어기(도 1, 11)는 램프 신호(RMP)의 로직 레벨에 기초하여 램프 신호(RMP)의 불량 여부를 확인할 수 있고, 램프 신호(RMP)가 불량인 경우, 램프 신호(RMP)에 기반한 전자 장치의 동작을 중단시킬 수 있거나, 램프 신호(RMP)의 불량을 사용자에게 알릴 수 있다.
도 14는 본 개시의 예시적인 실시예에 따른 전자 장치의 동작 방법을 나타내는 흐름도이다. 도 14의 흐름도는 도 13의 동작을 각종 신호들의 관점에서 설명한다. 도 1 및 도 3이 도 14와 함께 참조된다.
단계 S21에서, 전원 신호(PWR)가 턴-온 될 수 있다. 전원 신호(PWR)의 턴-온에 따라, 모니터링 회로(도 3, 200)의 각 구성들에 전원이 공급될 수 있다.
단계 S23에서, 프리셋 신호(PRST)가 턴-온될 수 있다. 예시적인 실시예에서, 프리셋 신호(PRST)가 로직-하이로 천이됨에 따라 미분기(도 3210)의 입력 단자는 단락될 수 있고, 앰프(도 3, AMP)의 입력 전압이 실질적으로 동일해짐에 따라 앰프(AMP) 전달 컨덕턴스는 상승하여 과도 상태가 빠르게 안정될 수 있다. 예시적인 실시예에 따르면, 프리셋 신호(PRST)는, 전원 신호(PWR)의 턴-온 후에 턴-온될 수 있다.
단계 S25에서, 리셋 신호(RST)가 턴-온될 수 있다. 예시적인 실시예에서, 리셋 신호(RST)가 로직-하이로 천이됨에 따라 판별기(도 3, 290)는 제1 비교 출력 전압(VCO1) 및/또는 제2 비교 출력 전압(VCO2)의 판별 동작을 개시할 수 있다. 예시적인 실시예에 따르면, 리셋 신호(RST)는, 프리셋 신호(PRST)의 턴-온 후에 턴-온될 수 있으나, 이에 제한되지는 않으며 프리셋 신호(PRST)의 턴-온 전에 턴-온될 수도 있다.
단계 S27에서, 모니터링 신호(MNT)가 턴-온 될 수 있다. 예시적인 실시예에서, 모니터링 신호(MNT)의 턴-온에 따라, 제1 비교 출력 전압(VCO1) 및/또는 제2 비교 출력 전압(VCO2)의 판별 결과인 검증 신호(VFY)가 출력될 수 있다. 예시적인 실시예에 따라, 모니터링 신호(MNT)의 턴-온 유지 시간은 미리 결정될 수 있다. 예시적인 실시예에 따르면, 모니터링 신호(MNT)는, 리셋 신호(RST)의 턴-온 후에 턴-온될 수 있다.
도 15는 본 개시의 예시적인 실시예에 따른 모니터링 회로의 동작 방법을 나타내는 흐름도이다. 도 15의 흐름도는 도 13의 동작을 기능적 관점에서 설명한다. 도 1 및 도 3이 도 15와 함께 참조된다.
단계 S31에서, 모니터링 회로는 램프 신호를 수신할 수 있다. 예시적인 실시예에 따르면, 모니터링 회로(도 1, 15는 램프 생성기(도 1, 13)로부터 램프 신호(RMP)를 수신할 수 있다.
단계 S33에서, 모니터링 회로는 램프 신호의 기울기를 모니터링할 수 있다. 예시적인 실시예에 따르면, 모니터링 회로(도 3, 200)는 램프 전압(도 3, VRAMP)의 기울기를 산출할 수 있고, 산출 결과를 미분 출력 전압(VDO)으로서 출력할 수 있다.
단계 S35에서, 모니터링 회로는 기울기의 범위가 정상 범위 내인지를 판별할 수 있다. 예시적인 실시예에 따르면, 모니터링 회로(200)는 산출된 기울기에 상응하는 전압 레벨과 제1 기준 전압(VREF1) 및 제2 기준 전압(VREF2) 각각을 비교할 수 있다. 예를 들어, 모니터링 회로(200)는 미분 출력 전압(VDO)이 제1 기준 전압(VREF1) 또는 제2 기준 전압(VREF2)의 범위 내에 있는지를 판별할 수 있다. 예를 들어, 판별기(도 3, 290)는 제1 비교 출력 전압(VCO1) 및/또는 제2 비교 출력 전압(VCO2)이 양수인지 음수인지를 확인할 수 있다.
단계 S37에서, 모니터링 회로는 플래그를 생성할 수 있다. 예시적인 실시예에 따르면, 모니터링 회로(200)는 검증 신호(VFY)의 일 실시예로서 램프 신호(RMP)의 정상 또는 불량 여부를 나타내는 플래그를 생성할 수 있다.
도 16은 도 15의 단계 S35 및 단계 S37을 보다 상세히 설명하는 흐름도이다.
단계 S33 이후인 단계 S310에서, 램프 신호의 기울기(SLOPE)가 제1 기준값(REF1)보다 큰지 판별될 수 있다. 기울기가 제1 기준값보다 크지 않다면(NO) 단계 S330이 수행되고, 기울기가 제1 기준값보다 크다면(YES) 단계 S370이 수행된다.
단계 S330에서, 램프 신호의 기울기(SLOPE)가 제2 기준값(REF2)보다 작은지 판별될 수 있다. 기울기가 제2 기준값보다 작지 않다면(NO) 단계 S350이 수행되고, 기울기가 제2 기준값보다 작다면(YES) 단계 S370이 수행된다.
단계 S350에서, 정상 플래그가 생성될 수 있다. 예시적인 실시예에서, 판별기(도 3, 290)는 램프 신호(RMP)의 기울기가 제1 기준값(REF1)보다 작고 제2 기준값(REF2)보다 큼에 따라 램프 신호(RMP)가 정상임을 나타내는 정상 플래그를 생성할 수 있다.
단계 S370에서, 정상 플래그가 생성될 수 있다. 예시적인 실시예에서, 판별기(도 3, 290)는 램프 신호(RMP)의 기울기가 제1 기준값(REF1)보다 크거나, 제2 기준값(REF2)보다 작음에 따라 램프 신호(RMP)가 불량임을 나타내는 불량 플래그를 생성할 수 있다.
도 17은 본 개시의 예시적 실시예에 따른 전자 장치(30)를 도시하는 블록도이다. 도 17을 참조하면, 전자 장치(30)에는 프로세서(31), 메모리(32), 스토리지 장치(33), 이미지 센서(34), 입출력 장치(35) 및 전원 공급기(36)를 포함할 수 있으며, 각 구성은 버스를 통해 서로 통신할 수 있다. 도 17의 이미지 센서(34)로서 도 10의 이미지 센서(500)가 적용될 수 있고, 중복되는 설명은 생략된다.
프로세서(31)는 전자 장치(30)의 동작에 필요한 특정 계산들 또는 태스크(task)들을 수행할 수 있다. 메모리(32) 및 스토리지 장치(33)는 전자 장치(30)의 동작에 필요한 데이터를 저장할 수 있다. 예를 들어, 프로세서(31)는 마이크로프로세서(micro-processor), CPU(central processing unit), AP(application processor) 등을 포함하고, 메모리(32)는 휘발성 메모리 및/또는 비휘발성 메모리를 포함하며, 스토리지 장치(33)는 SSD(solid state drive), HDD(hard disk drive), CD-ROM 등을 포함할 수 있다.
입출력 장치(35)는 키보드, 키패드, 마우스 등과 같은 입력 수단 및 프린터, 디스플레이와 같은 출력 수단을 포함할 수 있다. 전원 공급기(36)는 전자 장치(30)의 동작에 필요한 동작 전압을 공급할 수 있다.
도 18은 본 개시의 예시적 실시예에 따른 전자 장치(40)를 도시하는 블록도이다.
도 18을 참조하면, 본 개시의 예시적 실시예에 따른 전자 장치(40)는 이미지 센서(41), 이미지 신호 처리기(Image Signal Processor; ISP)(42), 애플리케이션 프로세서(AP)(43), 디스플레이 장치(44), 워킹 메모리(45), 스토리지 장치(46), 유저 인터페이스(47) 및 무선 송수신부(48)를 포함할 수 있다. 도 10의 이미지 센서(500)가 도 17의 이미지 센서(41)로 동작할 수 있으므로 중복되는 설명은 생략된다.
이미지 센서(41)는 수신되는 광 신호를 기초로 이미지 데이터, 예컨대 원시 이미지 데이터를 생성하고 이진 데이터를 이미지 신호 처리기(42)에 제공할 수 있다. 이미지 신호 처리기(42)는 이미지에 관한 디지털 데이터인 이미지 데이터(IDAT)의 데이터 형식을 변경하는 이미지 처리(예컨대 베이어 패턴의 이미지 데이터(IDAT)를 YUV 또는 RGB 형식으로 변경), 노이즈 제거, 밝기 조정, 선명도(sharpness) 조정 등의 화질 향상을 위한 이미지 처리 등을 수행할 수 있다. 예시적인 실시예에서, 이미지 신호 처리기(42)는 화이트 밸런싱(white balancing), 디노이징(denoising), 디모자이킹(demosaicking), 렌즈 쉐이딩(lenz shading), 및 감마 보정(gamma corrections), 모서리 검출(Edge Detection), 선명도 개선(Edge Enhancement), 노이즈 저감 처리, 게인 조정, 파형 정형화 처리, 보간(Interpolation) 처리, 에지 강조 처리, 비닝(Binning) 등 이미지 데이터(IDAT)의 왜곡을 제거하고 알고리즘 성능을 높이기 위한 사전 처리 작업을 수행할 수 있다. 이미지 신호 처리기(42)에서 전-처리가 됨에 따라, 이미지 데이터(IDAT)의 사후 처리 속도는 향상될 수 있다. 예시적인 실시예에서, 이미지 신호 처리기(42)는 공간 효율성을 위해 이미지 센서(41) 외부에 구비될 수 있고, 처리 속도의 향상을 위해 이미지 센서(41)의 내부에 포함될 수도 있다. 본 개시에서는 설명의 편의를 위해 이미지 신호 처리기(42)가 애플리케이션 프로세서(43)와 별도의 구비되는 것으로 설명되었으나, 이에 제한되지는 않는다. 예를 들어, 이미지 신호 처리기(42)는 별도의 하드웨어 또는 하드웨어와 소프트웨어의 결합으로 구성되지 않고, 애플리케이션 프로세서(43)의 하부 구성으로서 존재할 수도 있다.
애플리케이션 프로세서(43)는 전자 장치(40)의 전반적인 동작을 제어하며 응용 프로그램, 운영 체제 등을 구동하는 시스템 온 칩(SoC)으로 제공될 수 있다. 애플리케이션 프로세서(43)는 이미지 신호 처리기(42)의 동작을 제어할 수 있으며, 이미지 신호 처리기(42)에서 생성되는 변환된 이미지 데이터를 디스플레이 장치(44)에 제공하거나 또는 스토리지 장치(46)내에 저장할 수 있다.
워킹 메모리(45)는 애플리케이션 프로세서(43)가 처리 또는 실행하는 프로그램들 및/또는 데이터를 저장할 수 있다. 스토리지 장치(46)는 NND 플래시, 저항성 메모리 등의 비휘발성 메모리 장치로 구현될 수 있으며, 예컨대 스토리지 장치(46)는 메모리 카드(MMC, eMMC, SD, micro SD) 등으로 제공될 수 있다. 스토리지 장치(46)는 이미지 신호 처리기(42)의 이미지 처리 동작을 제어하는 실행 알고리즘에 대한 데이터 및/또는 프로그램을 저장할 수 있으며, 이미지 처리 동작이 수행될 때 데이터 및/또는 프로그램이 워킹 메모리(45)로 로딩될 수 있다. 예를 들어, 워킹 메모리(45) 또는 스토리지 장치(46)는 비휘발성 메모리로서 ROM (Read Only Memory), 플래시 메모리, PRAM (Phase-change RAM), MRAM (Magnetic RAM), RRAM (Resistive RAM), FRAM (Ferroelectric RAM) 등을 포함할 수 있고, 휘발성 메모리로서 SRAM(Static RAM), DRAM(Dynamic RAM)을 포함할 수 있으나, 상기 나열된 예시에 제한되지 않는다.
유저 인터페이스(47)는 키보드, 커튼 키 패널, 터치 패널, 지문 센서, 마이크 등 사용자 입력을 수신할 수 있는 다양한 장치들로 구현될 수 있다. 유저 인터페이스(47)는 사용자 입력을 수신하고, 수신된 사용자 입력에 대응하는 신호를 애플리케이션 프로세서(43)에 제공할 수 있다. 무선 송수신부(48)는 모뎀(48_1), 트랜스시버(48_2), 및 안테나(48_3)를 포함할 수 있다.
도 19는 램프 신호(RMP)를 이용하는 차량(50)을 도시하는 블록도이다.
도 19의 차량(50)은 도 1의 전자 장치(10)의 일 구현예일 수 있다. 또는, 차량(50)은 전자 장치(10)를 포함하는 전자 시스템을 이용해 구동될 수 있다.
본 개시의 예시적인 실시예에 따르면, 차량(50)은 자율 주행 모드를 지원할 수 있다. 자율 주행 모드는 본 개시에서 설명된 전자 장치(10)를 이용하여 지원될 수 있다. 이하, 차량(50)은 램프 신호(RMP)를 이용하여 대상을 센싱하고, 샘플링할 수 있거나, 램프 신호(RMP)에 기반한 다양한 전자적 기능을 제공할 수 있다. 본 개시에서 설명된 전자 장치, 이미지 센서 및 모니터링 회로에 대한 설명은 도 19의 차량(50)에 모두 적용될 수 있는 것으로 이해될 수 있다.
도 19를 참조하면, 램프 신호(RMP)를 이용하는 차량(50)은 이미지 센서(51), 유저 인터페이스(52), LIDAR(LIght Detection And Ranging) 센서(53), RADAR(RAdio Detection And Ranging) 센서(54), NPU(Neural Processing Unit)(55), CPU(56), ECU(57)를 포함할 수 있고, ECU(3000)는 스티어링 휠(58) 및 엔진(59)으로부터 차량의 조향 각 및 차량의 속력을 제공받을 수 있다. 이 외에도, 도시되지는 않았으나 차량(50)은 통신 모듈, 입출력 모듈, 보안 모듈, 전력 제어 장치 등을 더 포함할 수 있으며, 또한 다양한 종류의 제어 장치를 더 포함할 수 있다.
본 개시의 예시적 실시예에 따르면, 차량(50)은 센서들(예를 들어, 이미지 센서(51), 라이다 센서(53), 및/또는 레이더 센서(54))을 통해 획득한 외부 환경에 관한 정보를 이용하여 객체를 검출할 수 있다. 센서들(51, 53, 54)은 객체를 촬상하고, 객체와의 거리를 측정하여 프로세서들(예를 들어, CPU(56), NPU(55) 및 ECU(57))로 전송할 수 있다. 센서들(51, 53, 54)이 객체를 검출하기 위해, 램프 신호(RMP)가 이용될 수 있다. 램프 신호(RMP)는 일정한 크기로 점진적으로 상승하거나 하강하는 신호를 제공함으로써, 센싱된 객체에 대한 신호 또는 데이터를 샘플링할 수 있고, 아날로그 형태의 샘플링된 신호 또는 데이터는 디지털 정보로 변환될 수 있다. 언급된 센서들 외에도, ToF(Time of Flight) 센서, 초음파 센서, 적외선 센서, 지자기 센서(Magnetic sensor), 위치 센서(예컨대, GPS), 가속력 센서(Acceleration sensor), 기압 센서, 온/습도 센서, 근접 센서 및 자이로스코프 센서 등이 더 이용될 수도 있다. 각 센서들의 기능은 그 명칭으로부터 당업자가 직관적으로 추론할 수 있으므로, 구체적인 설명은 생략하기로 한다.
이미지 센서(51)는 이미지 또는 광 센싱 제공할 수 있으며, 예를 들어, CMOS(Complementary metal-oxide-semiconductor) 이미지 센서일 수 있다. 이미지 센서(51)는 객체에 관한 영상 또는 시각 정보를 획득할 수 있다. 예를 들어, 이미지 센서(51)는 차량의 전방에 부착되어 주행 영상을 촬상하거나, 차량의 전방에 위치한 객체와의 거리 등을 측정할 수 있다. 이미지 센서(51)가 부착되는 위치는 이에 한정되지 않고, 다양한 위치에 부착되어 객체의 관한 정보를 획득하려는 소기의 목적을 달성할 수 있다.
이미지 센서(51)는 차량(50) 주변 환경을 촬상할 수 있다. 차량(50)은 차량 주변을 360도 전 방향으로 촬상하기 위해 적어도 두 개의 이미지 센서들을 포함할 수 있다. 일 실시예에서 이미지 센서(51)에는 광각 렌즈가 구비될 수도 있다. 일 실시예에서, 차량의 전면, 후면, 좌측면, 우측면 네 개의 이미지 센서들이 차량(50)에 포함될 수 있으며, 이에 제한되지 않고 단일한 이미지 센서(51)로 차량 주변 환경을 촬상할 수도 있다. 이미지 센서(51)는 차량 주변 환경을 연속적으로 촬상함으로써 차량(50)에 차량 주변 환경에 대한 정보를 연속적으로 제공할 수 있다.
이미지 센서(51)에서 센싱된 이미지는 CPU(56) 및/또는 NPU(55)에서 처리될 수 있다. CPU(56)는 센싱된 이미지를 움직임 기반 방식으로 처리함으로써 객체를 검출할 수 있고, NPU(55)는 센싱된 이미지를 형태 기반 방식으로 처리함으로써 객체를 검출할 수 있다. 이미지 센서(51)는 차량의 전면에 부착되어 차량 전방의 외부 환경을 센싱할 수 있으나, 이에 한정되지는 않고 차량의 다양한 면에 부착되어 외부 환경을 센싱할 수 있다.
유저 인터페이스(52)는 차량의 계기판, 주행 정보를 나타내는 디스플레이, 네이게이션, 공조 장치 등 운전석 또는 조수석 등에 포함된 다양한 전자 장치 및 기계 장치를 포함할 수 있다.
LIDAR 센서(53)는 레이저 펄스를 발사하고, 대상 물체에서 레이저가 반사되는 것을 다시 수신하여 물체까지의 거리를 측정할 수 있다. LIDAR 센서(53)는 일반적으로 레이저, 스캐너, 수신기, 위치 확인 시스템을 포함할 수 있다. 레이저에는 대체로 600~1000nm(namo meter) 파장대의 빛이 사용되나, 용도에 따라 다를 수 있다. 스캐너는 센싱되는 주변 환경을 스캔하여 주변 환경에 대한 정보를 신속하게 획득할 수 있고, 복수 개의 거울을 이용한 여러 형태의 스캐너가 존재할 수 있다. 수신기는 대상 물체에 반사된 레이저 펄스를 수신하고, 레이저 펄스에서 광자를 감지하고 증폭할 수 있다. 위치 확인 시스템은 3차원 영상을 구현하기 위해 수신기가 구비된 장치의 위치 좌표와 방향을 확인할 수 있다. LIDAR 센서(53) 및 RADAR 센서(54)는 유효 측정 거리에 따라 구분될 수 있다.
RADAR 센서(54)는 전자기파를 발사하고, 대상 물체에서 전자기파가 반사되는 것을 다시 수신하여 물체까지의 거리를 측정하거나, 물체를 식별하고, 물체의 위치 및 이동 속력 등을 측정할 수 있다. RADAR 센서(54)는 송신부와 수신부를 포함할 수 있다. 송신부는 전자기파를 발생시키고 출력할 수 있고, 수신부는 대상 물체에서 반사되는 반향파를 수신하여 신호를 처리할 수 있다. RADAR 센서(53)에는 송신 및 수신이 하나의 안테나를 통해 이루어질 수 있으나, 이에 제한되는 것은 아니다. RADAR 센서(54)에 쓰이는 전자기파의 주파수 대역은 전파 대역(Radio wave) 또는 마이크로파 대역(Micro wave)이나, 목적에 따라 변경될 수 있다. 일 실시예에서, LIDAR 센서(53) 및 RADAR 센서(54)는 차량과 관심 객체간의 상대적 위치 관계의 판단을 보조하기 위해 차량에 부착될 수 있다. RADAR 센서(54)는 롱 레이더 센서, 숏 레이더 센서로 구분될 수 있다.
NPU(55)는 입력 데이터를 수신하고 인공 신경망을 이용하여 연산을 수행하며, 연산 결과를 기초로 출력 데이터를 제공할 수 있다. NPU(55)는 동시다발적인 행렬 연산에 최적화된 프로세서일 수 있고, 여러 개의 연산을 실시간으로 처리할 수 있으며, 축적된 데이터를 기반으로 스스로 학습하여 최적의 값을 도출해낼 수 있다. NPU(55)는 동시다발적인 행렬 연산에 최적화되어 여러 개의 연산을 실시간으로 처리할 수 있고, 축적된 데이터를 기반으로 스스로 학습하여 현재 주행 파라미터에서의 극대값(local-maximum)을 도출해낼 수 있다.
예시적인 실시예에서, NPU(55)는 딥-러닝 방식의 알고리즘을 수행하기 위해 특화된 프로세서일 수 있다. 예를 들어, NPU(55)는 딥-러닝 방식의 알고리즘을 수행하기 위해 특화된 프로세서일 수 있다. 예를 들어, NPU(55)는 CNN(Convolution Neural Network), R-CNN(Region with Convolution Neural Network), RPN(Region Proposal Network), RNN(Recurrent Neural Network), Fully Convolutional Network, LSTM(Long Short-Term Memory) Network, Classification Network 등 다양한 종류의 네트워크에 기초한 연산 처리가 가능하다. 다만, 이에 한정되지는 않으며 인간의 신경망을 모사한 다양한 종류의 연산 처리가 가능하다.
NPU(55)는 이미지 센서(51)로부터 주행 영상을 수신할 수 있고, 주행 영상을 기초하여 형태 기반의 객체 검출을 수행할 수 있다. NPU(55)는 복수의 객체들이 가지는 특징(feature)을 추출하고, 축적된 데이터를 기반으로 스스로 학습함으로써 주행 영상에서 복수의 객체들 각각을 구분할 수 있다. 예를 들어, NPU(55)는 축적된 데이터를 학습 자료로 삼아 결정된 특징을 바탕으로, 단일 주행 영상에서도 차량, 보행자, 신호등, 차선 등 주행 시의 판단 기준이 되는 객체들을 추출할 수 있다.
CPU(56)는 차량(50)의 전반적인 동작을 제어한다. CPU(56)는 하나의 프로세서 코어(Single Core)를 포함하거나, 복수의 프로세서 코어들(Multi-Core)을 포함할 수 있다. CPU(56)는 메모리에 저장된 프로그램들 및/또는 데이터를 처리 또는 실행할 수 있다. 예를 들어, CPU(56)는 메모리에 저장된 프로그램들을 실행함으로서, NPU(55) 및 ECU(57)의 기능을 제어할 수 있다.
CPU(56)는 ECU(57)로부터 조향 각 및 차량 속력을 획득할 수 있다. 조향 각(Steering Angle)은 운전자의 스티어링 휠(Steering Wheel)(58) 조작에 의해 결정되고, 조향 제어 장치의 동작을 관장하는 ECU(57)에서 처리되어 CPU(56)에 제공될 수 있다. 차량 속력은 운전자의 페달링(예를 들어, 엑셀러레이터의 작동), 엔진(59)의 회전 속력, 휠 센서에서 측정된 바퀴 속력 중 적어도 어느 하나에 기초하여 측정될 수 있고, 차량의 속력을 관장하는 ECU(57)에서 처리되어 CPU(56)에 제공될 수 있다.
또한, CPU(56)는 차량과 주변 차량과의 상대적 위치 관계를 판단하고, 정해진 주행 계획에 따라 주변 차량과의 일정한 거리를 유지하기 위한 정속 주행을 위해 엔진(59)의 회전 수를 유지하는 명령을 발행할 수 있고, 차량과 주변 차량이 임계 거리 이하인 경우, 또는 주변 차량의 끼어들기 상황(cut-in objec)시 회피 기동을 수행하기 위해 스티어링 휠(58)을 좌우로 조절하여 조향 각을 변경하는 명령을 발행할 수 있다. 도 19에서는 스티어링 휠(58) 및 엔진(59)이 조향 각 및 차량 속력과 관련된 구성으로 개시되었으나, 이에 국한되지 않고 다양한 차량의 부품들을 통해 조향 각 및 차량 속력이 결정될 수 있다.
CPU(56)는 주행 영상에서 움직임 기반 방식의 객체 검출을 수행할 수 있다. 움직임 기반 방식은 시간의 흐름에 따라 객체의 움직임 정도를 검출하여 상대적인 움직임을 판단하는 방법이다. 주행 영상은 이미지 센서(51)를 통해 프레임마다 연속적으로 획득될 수 있다. 예를 들어, 각 프레임은 60fps(frame per second)의 속력으로 촬상될 수 있고, 그에 따라 CPU(56)는 1/60초 마다 획득된 이미지 프레임간의 움직임을 시간에 흐름에 따라 검출 할 수 있다. 움직임 기반 방식에는 객체의 움직임 벡터의 분포를 의미하는 옵티컬 플로우(Optical Flow) 등이 포함될 수 있다.
CPU(56)는 이미지 센서(51) 외에도, LIDAR 센서(53) 및 RADAR 센서(54)로부터 획득되는 객체와의 거리를 보조적으로 활용하여 차량의 주행 상태를 안정적으로 유지할 수 있다. 또한, CPU(56)는 운전자의 유저 인터페이스(52) 조작에 따라 차량 내외부의 상태를 조절하는 명령을 발행할 수 있다.
ECU(57)는 차량의 동작 전반 또는 동작의 일부를 제어하도록 마련되는 전자 제어 장치일 수 있다. ECU(57)는, CAN(Controller Area Network) 다중화 버스(CAN multiplexing bus)를 통해 연소 기관의 작동, 하나 이상의 전기 모터의 작동, 그리고 반-자동 기어 박스(semi-automatic gearbox(SAGB)) 또는 자동 기어 박스(automatic gearbox(AGB)), 그 밖의 운전자의 제어에 따른 차량의 파라미터들에 따라 차량 작동을 제어할 수 있다
ECU(57)는 차량의 엔진, 조향 제어 장치의 엑츄에이터, 변속 제어 시스템, 잠김 방지 브레이크 시스템(Anti-lock Brake System), 에어백 제어 시스템 등을 컴퓨터로 전자적으로 제어할 수 있고, 엔진의 회전 속력 또는 휠 센서에서 측정된 바퀴 속력에 기반하여 차량의 속력을 차량(50)에 제공할 수 있으며, 조향 제어 장치로부터 차량의 조향 각을 차량(50)에 제공할 수 있다.
예시적인 실시예에 따르면, ECU(57)는 CPU(56) 및 NPU(55)에서 발행된 명령에 기초하여 스티어링 휠(58) 및 엔진(59)의 상태를 조절할 수 있다. 일 실시예에서, ECU(57)는 CPU(56) 및 NPU(55)에서 발행된 명령에 따라 차량을 가속 또는 감속할 수 있고, 가/감속을 위해 엔진(59)에 엔진 회전 속력을 증가/감소 시키는 신호를 제공할 수 있다. 또한 ECU(57)는 정해진 주행 계획에 따라 주변 차량과의 거리가 임계 거리 이하인 경우, 또는 주변 차량의 끼어들기 상황(cut-in objec)시 회피 기동을 위해 스티어링 휠(58)을 좌우로 변경할 수 있다.
본 개시의 예시적인 실시예에 따르면, CPU(56) 또는 ECU(57)는 램프 신호(RML)의 불량을 확인하고, 차량(50)의 자율 주행 모드에서 벗어날 수 있다. 예를 들어, CPU(56) 또는 ECU(57)는 이미지 센서(51)에 기반한 자율 주행 모드로 운행 중, 램프 신호(RMP)의 불량을 확인할 수 있고, 즉시 자율 주행 모드에서 운전자에 의한 수동 주행 모드로 변경함으로써 사용자의 안전을 도모할 수 있다. 예를 들어, 차량(50)은 램프 신호(RMP)의 불량을 확인하고, 램프 신호(RMP)에 기반한 주행 보조 기능을 중단할 수 있고, 이로써 운전자 또는 사용자의 안전은 확보될 수 있다.
ECU(57)는 CPU(56)와 별도로 차량에 구비되는 것으로 도면에 도시되었으나, 이에 한정되지 않고 ECU(57)의 차량 제어 기능은 CPU(56) 내부에 포함된 채로 함께 수행될 수 있으며, 이 경우, CPU(56)는 적어도 두 개의 프로세서 코어들(Multi-core)을 구비한 것으로 이해될 수 있다. 도 19에서, ECU(57)는 CPU(56)와 별도의 구성인 것으로 도시되었으나, 이에 제한되지 않고 CPU(56)의 내부에 존재할 수 있다.
도 19에 도시되지는 않았으나, 차량(50)은 통신 모듈을 더 포함할 수 있다. 통신 모듈은 데이터를 차량(50)의 외부로 전송하거나, 외부로부터의 데이터를 수신할 수 있다. 예컨대, 통신 모듈은 차량(50)의 외부 대상과 통신을 수행할 수 있다. 이 경우 통신 모듈은 V2X(Vehicle to Everthing) 방식으로 통신을 수행할 수 있다. 예컨대, 통신 모듈은 V2V(Vehicle to Vehicle), V2I(Vehicle to Infra), V2P(Vehile to Pedestrian) 및 V2N(Vehicle to Nomadic Devices) 방식으로 통신을 수행할 수 있다. 그러나 이에 제한되지 않으며, 통신 모듈은 공지된 다양한 통신 방식에 의해 데이터를 전송 및 수신할 수 있다. 예컨대, 통신 모듈은 예를 들면, 3G, 4G(LTE), 5G, Wi-Fi, 블루투스, BLE(Bluetooth Low Energy), Zigbee, NFC(Near Field Communication), 초음파를 통한 통신 방법 등에 의해 통신을 수행할 수 있으며, 근거리 통신, 원거리 통신을 모두 포함할 수 있다.
이상에서와 같이 도면과 명세서에서 예시적인 실시예들이 개시되었다. 본 명세서에서 특정한 용어를 사용하여 실시예들을 설명되었으나, 이는 단지 본 개시의 기술적 사상을 설명하기 위한 목적에서 사용된 것이지 의미 한정이나 청구범위에 기재된 본 개시의 범위를 제한하기 위하여 사용된 것은 아니다. 그러므로 본 기술분야의 통상의 지식을 가진 자라면 이로부터 다양한 변형 및 균등한 타 실시예가 가능하다는 점을 이해할 것이다. 따라서, 본 개시의 진정한 기술적 보호범위는 첨부된 청구범위의 기술적 사상에 의해 정해져야 할 것이다.