KR20220121976A - 하이브리드 차량의 배터리 soc 제어 장치 및 방법 - Google Patents
하이브리드 차량의 배터리 soc 제어 장치 및 방법 Download PDFInfo
- Publication number
- KR20220121976A KR20220121976A KR1020210025999A KR20210025999A KR20220121976A KR 20220121976 A KR20220121976 A KR 20220121976A KR 1020210025999 A KR1020210025999 A KR 1020210025999A KR 20210025999 A KR20210025999 A KR 20210025999A KR 20220121976 A KR20220121976 A KR 20220121976A
- Authority
- KR
- South Korea
- Prior art keywords
- soc
- battery soc
- battery
- destination
- processor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/13—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/12—Controlling the power contribution of each of the prime movers to meet required power demand using control strategies taking into account route information
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2045—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed for optimising the use of energy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/13—Maintaining the SoC within a determined range
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/15—Control strategies specially adapted for achieving a particular effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/62—Vehicle position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/62—Vehicle position
- B60L2240/622—Vehicle position by satellite navigation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/64—Road conditions
- B60L2240/642—Slope of road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/10—Driver interactions by alarm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/16—Driver interactions by display
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
- B60L2260/52—Control modes by future state prediction drive range estimation, e.g. of estimation of available travel distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
- B60L2260/58—Departure time prediction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0002—Automatic control, details of type of controller or control system architecture
- B60W2050/0004—In digital systems, e.g. discrete-time systems involving sampling
- B60W2050/0005—Processor details or data handling, e.g. memory registers or chip architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/24—Energy storage means
- B60W2710/242—Energy storage means for electrical energy
- B60W2710/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y04—INFORMATION OR COMMUNICATION TECHNOLOGIES HAVING AN IMPACT ON OTHER TECHNOLOGY AREAS
- Y04S—SYSTEMS INTEGRATING TECHNOLOGIES RELATED TO POWER NETWORK OPERATION, COMMUNICATION OR INFORMATION TECHNOLOGIES FOR IMPROVING THE ELECTRICAL POWER GENERATION, TRANSMISSION, DISTRIBUTION, MANAGEMENT OR USAGE, i.e. SMART GRIDS
- Y04S10/00—Systems supporting electrical power generation, transmission or distribution
- Y04S10/12—Monitoring or controlling equipment for energy generation units, e.g. distributed energy generation [DER] or load-side generation
- Y04S10/126—Monitoring or controlling equipment for energy generation units, e.g. distributed energy generation [DER] or load-side generation the energy generation units being or involving electric vehicles [EV] or hybrid vehicles [HEV], i.e. power aggregation of EV or HEV, vehicle to grid arrangements [V2G]
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Power Engineering (AREA)
- Sustainable Energy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Secondary Cells (AREA)
Abstract
Description
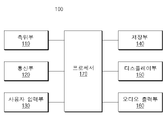
도 2는 본 발명의 일 실시 예에 따른 배터리 SOC 제어 장치의 블록구성도를 도시한다.
도 3은 본 발명의 일 실시 예에 따른 하이브리드 차량의 배터리 SOC 제어 방법을 도시한 흐름도이다.
도 4는 본 발명의 실시 예들에 따른 경로 설정 화면을 도시한 도면이다.
도 5는 본 발명의 실시 예들에 따른 배터리 SOC 설정 화면을 도시한 도면이다.
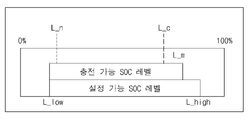
도 6은 본 발명의 실시 예들에 따른 설정 가능한 SOC 범위를 표시한 예시도이다.
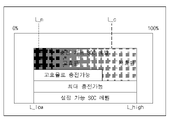
도 7은 본 발명의 실시 예들에 따른 충전 가능한 SOC 범위를 표시한 예시도이다.
도 8은 본 발명의 실시 예들에 따른 충전 효율이 반영된 충전 가능 SOC 범위 표시 화면을 도시한 예시도이다.
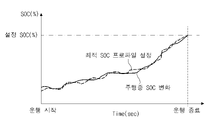
도 9는 본 발명의 실시 예들에 따른 충전 프로파일을 도시한 그래프이다.
도 10은 본 발명의 제1 실시 예에 따른 배터리 SOC 변화를 도시한 그래프이다.
도 11은 본 발명의 제2 실시 예에 따른 배터리 SOC 변화를 도시한 그래프이다.
도 12는 본 발명의 실시 예들에 따른 SOC 밸런스 레벨 기반 배터리 SOC 제어에 따른 배터리 SOC 변화를 도시한 그래프이다.
도 13은 본 발명의 제3 실시 예에 따른 배터리 SOC 변화를 도시한 그래프이다.
도 14는 본 발명의 제4 실시 예에 따른 배터리 SOC 변화를 도시한 그래프이다.
도 15는 본 발명의 제5 실시 예에 따른 배터리 SOC 변화를 도시한 그래프이다.
도 16은 본 발명의 실시 예들에 따른 엔진 출력의 일 예를 도시한 그래프이다.
도 17은 본 발명의 실시 예들에 따른 엔진 출력의 다른 일 예를 도시한 그래프이다.
도 18은 본 발명의 실시 예들에 따른 배터리 SOC 제어 방법을 실행하는 컴퓨팅 시스템을 보여주는 블록도이다.
Claims (22)
- 적어도 하나의 프로세서를 포함하고,
상기 프로세서는,
목적지가 설정되면 SOC 설정 기능을 활성화하여 차량의 운행 종료 시 배터리 SOC를 설정하고,
설정된 배터리 SOC가 고효율로 충전 가능한 SOC 이하인지를 확인하고,
상기 설정된 배터리 SOC가 고효율로 충전 가능한 SOC 이하이면, 상기 차량이 목적지 도착 시 배터리 SOC가 상기 설정된 배터리 SOC에 도달하도록 배터리 SOC 제어를 수행하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 장치.
- 청구항 1에 있어서,
상기 프로세서는,
상기 SOC 설정 기능을 활성화하며 설정 가능한 SOC 범위 및 목적지까지 주행 시 충전 가능한 SOC 범위를 디스플레이 화면에 표시하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 장치.
- 청구항 1에 있어서,
상기 프로세서는,
상기 SOC 설정 기능 활성화 시 저장부에 저장된 SOC 설정 이력을 참조하여 상기 운행 종료 시 배터리 SOC를 자동으로 설정하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 장치.
- 청구항 1에 있어서,
상기 고효율로 충전 가능한 SOC는,
상기 목적지까지 엔진을 최적효율점(OOL)로 운전하는 경우 예상되는 배터리 SOC인 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 장치.
- 청구항 1에 있어서,
상기 고효율로 충전 가능한 SOC는,
상기 목적지까지의 주행 거리가 기준 거리 이상인 경우 설정 가능 최대 SOC로 설정되는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 장치.
- 청구항 5에 있어서,
상기 기준 거리는,
상기 목적지와 상기 차량의 현재 위치의 고도 정보에 근거하여 가변되는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 장치.
- 청구항 1에 있어서,
상기 프로세서는,
상기 설정된 배터리 SOC가 SOC 밸런스 레벨을 초과하는 경우, 주행 경로 정보를 활용하여 충전 프로파일을 설정하고, 설정된 충전 프로파일을 바탕으로 엔진 운전점을 제어하여 배터리를 충전하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 장치.
- 청구항 1에 있어서,
상기 프로세서는,
현재 배터리 SOC가 상기 설정된 배터리 SOC보다 낮은 경우, 주행 부하가 낮을 때 EV 모드로의 주행 모드 전환을 금지하고 엔진을 최적효율점에서 운전하여 주행에 필요한 에너지를 제외한 나머지 에너지로 배터리를 충전하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 장치.
- 청구항 1에 있어서,
상기 프로세서는,
현재 배터리 SOC가 상기 설정된 배터리 SOC보다 높은 경우, 상기 설정된 배터리 SOC를 SOC 밸런스 레벨로 설정하여 배터리 SOC가 상기 설정된 배터리 SOC에 수렴하도록 제어하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 장치.
- 청구항 9에 있어서,
상기 프로세서는,
상기 설정된 배터리 SOC가 기정해진 기준 SOC 이상으로 설정된 경우, SOC 밸런스 레벨을 상기 설정된 배터리 SOC 보다 낮게 설정하여 배터리 SOC 제어를 수행하고, 상기 차량이 목적지에 근접하면 상기 설정된 배터리 SOC까지 배터리를 충전하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 장치.
- 청구항 1에 있어서,
상기 프로세서는,
상기 설정된 배터리 SOC가 기정해진 기준 SOC 이상으로 설정된 경우, SOC 밸런스 레벨을 상기 설정된 배터리 SOC 보다 낮게 설정하여 배터리 SOC 제어를 수행하고, 배터리 SOC가 상기 SOC 밸런스 레벨에 도달하면 배터리 SOC가 상기 SOC 밸런스 레벨을 기준으로 스윙하도록 제어하고, 상기 차량이 목적지에 근접하면 상기 설정된 배터리 SOC까지 배터리를 충전하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 장치.
- 목적지가 설정되면 SOC 설정 기능을 활성화하여 차량의 운행 종료 시 배터리 SOC를 설정하는 단계;
상기 설정된 배터리 SOC가 고효율로 충전 가능한 SOC 이하인지를 확인하는 단계; 및
상기 설정된 배터리 SOC가 고효율로 충전 가능한 SOC 이하이면, 상기 차량이 목적지 도착 시 배터리 SOC가 상기 설정된 배터리 SOC에 도달하도록 배터리 SOC 제어를 수행하는 단계를 포함하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 방법.
- 청구항 12에 있어서,
상기 배터리 SOC를 설정하는 단계는,
상기 SOC 설정 기능 활성화 시 설정 가능한 SOC 범위 및 목적지까지 주행 시 충전 가능한 SOC 범위를 디스플레이 화면에 표시하는 단계를 포함하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 방법.
- 청구항 12에 있어서,
상기 배터리 SOC를 설정하는 단계는,
상기 SOC 설정 기능 활성화 시 저장부에 저장된 SOC 설정 이력을 참조하여 상기 운행 종료 시 배터리 SOC를 자동으로 설정하는 단계를 더 포함하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 방법.
- 청구항 12에 있어서,
상기 설정된 배터리 SOC가 고효율로 충전 가능한 SOC 이하인지를 확인하는 단계는,
상기 목적지까지 엔진을 최적효율점(OOL)로 운전하는 경우 예상되는 배터리 SOC를 상기 고효율로 충전 가능한 SOC로 설정하는 단계를 포함하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 방법.
- 청구항 12에 있어서,
상기 설정된 배터리 SOC가 고효율로 충전 가능한 SOC 이하인지를 확인하는 단계는,
상기 목적지까지의 주행 거리가 기준 거리 이상인 경우 상기 고효율로 충전 가능한 SOC를 설정 가능 최대 SOC로 설정하는 단계를 더 포함하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 방법.
- 청구항 16에 있어서,
상기 기준 거리는,
상기 목적지와 상기 차량의 현재 위치의 고도 정보에 근거하여 가변되는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 방법.
- 청구항 12에 있어서,
상기 배터리 SOC 제어를 수행하는 단계는,
상기 설정된 배터리 SOC가 SOC 밸런스 레벨을 초과하는 경우, 주행 경로 정보를 활용하여 충전 프로파일을 설정하는 단계; 및
상기 설정된 충전 프로파일을 바탕으로 엔진 운전점을 제어하여 배터리를 충전하는 단계를 포함하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 방법.
- 청구항 12에 있어서,
상기 배터리 SOC 제어를 수행하는 단계는,
현재 배터리 SOC가 상기 설정된 배터리 SOC보다 낮은 경우, 주행 부하가 낮을 때 EV 모드로의 주행 모드 전환을 금지하고 엔진을 최적효율점에서 운전하여 주행에 필요한 에너지를 제외한 나머지 에너지로 배터리를 충전하는 단계를 포함하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 방법.
- 청구항 12에 있어서,
상기 배터리 SOC 제어를 수행하는 단계는,
현재 배터리 SOC가 상기 설정된 배터리 SOC보다 높은 경우, 상기 설정된 배터리 SOC를 SOC 밸런스 레벨로 설정하여 배터리 SOC가 상기 설정된 배터리 SOC에 수렴하도록 제어하는 단계를 포함하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 방법.
- 청구항 20에 있어서,
상기 배터리 SOC 제어를 수행하는 단계는,
상기 설정된 배터리 SOC가 기정해진 기준 SOC 이상으로 설정된 경우, SOC 밸런스 레벨을 상기 설정된 배터리 SOC 보다 낮게 설정하여 배터리 SOC 제어를 수행하는 단계; 및
상기 차량이 목적지에 근접하면 상기 설정된 배터리 SOC까지 배터리를 충전하는 단계를 더 포함하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 방법.
- 청구항 12에 있어서,
상기 배터리 SOC 제어를 수행하는 단계는,
상기 설정된 배터리 SOC가 기정해진 기준 SOC 이상으로 설정된 경우, SOC 밸런스 레벨을 상기 설정된 배터리 SOC 보다 낮게 설정하여 배터리 SOC 제어를 수행하는 단계;
상기 배터리 SOC가 상기 SOC 밸런스 레벨에 도달하면 배터리 SOC가 상기 SOC 밸런스 레벨을 기준으로 스윙하도록 제어하는 단계; 및
상기 차량이 목적지에 근접하면 상기 설정된 배터리 SOC까지 배터리를 충전하는 단계를 포함하는 것을 특징으로 하는 하이브리드 차량의 배터리 SOC 제어 방법.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210025999A KR20220121976A (ko) | 2021-02-25 | 2021-02-25 | 하이브리드 차량의 배터리 soc 제어 장치 및 방법 |
| US17/391,652 US12503007B2 (en) | 2021-02-25 | 2021-08-02 | Device and method for controlling state of charge of battery of hybrid vehicle |
| CN202110928857.XA CN114954423A (zh) | 2021-02-25 | 2021-08-13 | 用于控制混合动力车辆的电池的荷电状态的装置和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210025999A KR20220121976A (ko) | 2021-02-25 | 2021-02-25 | 하이브리드 차량의 배터리 soc 제어 장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220121976A true KR20220121976A (ko) | 2022-09-02 |
Family
ID=82901532
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210025999A Ceased KR20220121976A (ko) | 2021-02-25 | 2021-02-25 | 하이브리드 차량의 배터리 soc 제어 장치 및 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12503007B2 (ko) |
| KR (1) | KR20220121976A (ko) |
| CN (1) | CN114954423A (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20250109462A (ko) | 2024-01-10 | 2025-07-17 | 주식회사 현대케피코 | 하이브리드 차량의 배터리 충전 제어 방법 및 장치 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230041491A (ko) * | 2021-09-17 | 2023-03-24 | 현대자동차주식회사 | 차량 전원 관리 장치 및 방법 |
| JP7544084B2 (ja) * | 2022-02-09 | 2024-09-03 | トヨタ自動車株式会社 | 車両 |
| JP7740176B2 (ja) * | 2022-09-13 | 2025-09-17 | トヨタ自動車株式会社 | 情報処理装置が実行する方法 |
| CN115431837B (zh) * | 2022-10-09 | 2025-06-06 | 北京亿华通科技股份有限公司 | 一种燃料电池车辆能量管理控制方法及燃料电池车辆 |
| EP4659998A4 (en) * | 2023-02-08 | 2026-04-08 | Shenzhen Yinwang Intelligent Technology Co Ltd | CONTROL METHOD AND DEVICE, AND VEHICLE |
| CN116135630B (zh) * | 2023-03-31 | 2026-02-24 | 重庆赛力斯凤凰智创科技有限公司 | 露营模式控制方法、装置及增程式电动汽车 |
| KR20240162708A (ko) * | 2023-05-09 | 2024-11-18 | 현대자동차주식회사 | 전기차에서 배터리 전력상태 정보를 이용한 내비게이션 장치 및 방법 |
| CN116945971B (zh) * | 2023-06-19 | 2026-03-27 | 成都赛力斯科技有限公司 | 电池电量自适应调节方法、装置、计算机设备和存储介质 |
| TWI870993B (zh) * | 2023-09-01 | 2025-01-21 | 三陽工業股份有限公司 | 油電混合車輛之電池保護方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7849944B2 (en) * | 2007-06-12 | 2010-12-14 | Ut-Battelle, Llc | Self-learning control system for plug-in hybrid vehicles |
| CN101468610B (zh) * | 2007-12-28 | 2011-03-30 | 比亚迪股份有限公司 | 一种用于混合动力车辆的充电控制装置及其方法 |
| WO2013044357A1 (en) * | 2011-09-26 | 2013-04-04 | Magna E-Car Systems Of America, Inc. | Control strategies for state of charge of battery pack for electric vehicle with range extender |
| JP6172008B2 (ja) * | 2014-03-24 | 2017-08-02 | トヨタ自動車株式会社 | ハイブリッド車両 |
| KR101655609B1 (ko) | 2014-12-11 | 2016-09-07 | 현대자동차주식회사 | 하이브리드 자동차의 배터리 충전 상태 제어 장치 및 방법 |
| FR3070346B1 (fr) | 2017-08-30 | 2021-01-01 | Renault Sas | Procede de gestion de l'etat de charge d'un vehicule hybride |
| US10844824B2 (en) * | 2018-02-13 | 2020-11-24 | Ford Global Technologies, Llc | System and method for a range extender engine of a hybrid electric vehicle |
| JP7056385B2 (ja) | 2018-05-31 | 2022-04-19 | トヨタ自動車株式会社 | 電動車両 |
| KR102569895B1 (ko) | 2018-06-25 | 2023-08-23 | 현대자동차주식회사 | 하이브리드 자동차 및 그를 위한 주행 제어 방법 |
| US10836371B1 (en) * | 2019-10-11 | 2020-11-17 | Ford Global Technologies, Llc | Battery saving controls associated with mobile generator use of a vehicle |
-
2021
- 2021-02-25 KR KR1020210025999A patent/KR20220121976A/ko not_active Ceased
- 2021-08-02 US US17/391,652 patent/US12503007B2/en active Active
- 2021-08-13 CN CN202110928857.XA patent/CN114954423A/zh active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20250109462A (ko) | 2024-01-10 | 2025-07-17 | 주식회사 현대케피코 | 하이브리드 차량의 배터리 충전 제어 방법 및 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220266716A1 (en) | 2022-08-25 |
| US12503007B2 (en) | 2025-12-23 |
| CN114954423A (zh) | 2022-08-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20220121976A (ko) | 하이브리드 차량의 배터리 soc 제어 장치 및 방법 | |
| KR101765641B1 (ko) | 마일드 하이브리드 차량의 엔진 시동 제어 장치 및 방법 | |
| US11285936B2 (en) | Control device for hybrid vehicle | |
| US10730504B2 (en) | Vehicle and method for controlling the vehicle | |
| US20100324765A1 (en) | Vehicle equipped with power storage device and temperature control method of power storage device | |
| US20140180512A1 (en) | Location-based vehicle powertrain regulation system | |
| WO2010140305A1 (ja) | 動力発生源制御装置 | |
| JP6965809B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6897528B2 (ja) | ハイブリッド車両の制御装置 | |
| US10737685B2 (en) | Hybrid vehicle and control device mounted thereon | |
| CN106740825B (zh) | 用于控制能够以燃料经济模式操作的车辆的方法和系统 | |
| US20200130669A1 (en) | Communication control device, communication system, method of controlling communication | |
| US20230359419A1 (en) | Intelligent heads up display | |
| US10583827B2 (en) | Hybrid vehicle and control device mounted thereon | |
| US10604159B2 (en) | Display device | |
| US11355943B2 (en) | Battery management apparatus for vehicle and method of the same | |
| US10821842B2 (en) | Electric vehicle | |
| US11597373B2 (en) | Hybrid vehicle drive support plan according to route and air conditioning power consumption | |
| US20210078568A1 (en) | Hybrid vehicle | |
| JP2006211859A (ja) | 車両の制御装置 | |
| US20250214565A1 (en) | Hybrid electric vehicle, control method for hybrid electric vehicle, power supply mode setting system, and power supply mode setting method | |
| JP2022015399A (ja) | 車両の制御装置 | |
| US20250067567A1 (en) | In-vehicle control device | |
| US20250198778A1 (en) | Information processing device and information processing method | |
| US20260116369A1 (en) | Hybrid vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D21 | Rejection of application intended |
Free format text: ST27 STATUS EVENT CODE: A-1-2-D10-D21-EXM-PE0902 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13 | Pre-grant limitation requested |
Free format text: ST27 STATUS EVENT CODE: A-2-3-E10-E13-LIM-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11 | Amendment of application requested |
Free format text: ST27 STATUS EVENT CODE: A-2-2-P10-P11-NAP-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| B15 | Application refused following examination |
Free format text: ST27 STATUS EVENT CODE: N-2-6-B10-B15-EXM-PE0601 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| E13 | Pre-grant limitation requested |
Free format text: ST27 STATUS EVENT CODE: A-2-3-E10-E13-LIM-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11 | Amendment of application requested |
Free format text: ST27 STATUS EVENT CODE: A-2-2-P10-P11-NAP-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |