KR20220132753A - 굴착기에서 타겟 객체에 대한 거리를 측정하는 장치 및 그의 동작 방법 - Google Patents
굴착기에서 타겟 객체에 대한 거리를 측정하는 장치 및 그의 동작 방법 Download PDFInfo
- Publication number
- KR20220132753A KR20220132753A KR1020210037676A KR20210037676A KR20220132753A KR 20220132753 A KR20220132753 A KR 20220132753A KR 1020210037676 A KR1020210037676 A KR 1020210037676A KR 20210037676 A KR20210037676 A KR 20210037676A KR 20220132753 A KR20220132753 A KR 20220132753A
- Authority
- KR
- South Korea
- Prior art keywords
- distance
- camera
- boom
- target object
- excavator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/24—Safety devices, e.g. for preventing overload
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/10—Measuring distances in line of sight; Optical rangefinders using a parallactic triangle with variable angles and a base of fixed length in the observation station, e.g. in the instrument
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0251—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means extracting 3D information from a plurality of images taken from different locations, e.g. stereo vision
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/247—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons
- G05D1/249—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons from positioning sensors located off-board the vehicle, e.g. from cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/181—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a plurality of remote sources
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/05—Specific applications of the controlled vehicles for soil shifting, building, civil engineering or mining, e.g. excavators
-
- G05D2201/021—
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Electromagnetism (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Component Parts Of Construction Machinery (AREA)
- Operation Control Of Excavators (AREA)
Abstract
Description
도 1b는 본 개시물의 다양한 실시예들에 따른 붐 카메라를 이용하여 타겟 객체를 촬영하는 예시도이다.
도 2는 본 개시물의 다양한 실시예들에 따른 굴착기에 구비된 전자 장치의 블록도이다.
도 3은 본 개시물의 다양한 실시예들에 따른 굴착기에서 타겟 객체에 대한 거리를 측정하는 흐름도이다.
도 4는 본 개시물의 다양한 실시예들에 따른 붐 카메라의 획득 영상을 나타내는 도면이다.
도 5는 본 개시물의 다양한 실시예들에 따른 카메라에서 타겟 객체에 대한 작동 거리를 나타내는 도면이다.
도 6은 본 개시물의 다양한 실시예들에 따른 작동 거리와 카메라에서 타겟 객체까지의 실제 거리에 대한 관계를 나타내는 도면이다.
도 7a 및 도 7b는 본 개시물의 다양한 실시예들에 따른 로컬 좌표계를 나타내는 도면이다.
도 8은 본 개시물의 다양한 실시예들에 따른 붐 카메라의 획득 영상 내 버켓의 픽셀 좌표를 나타내는 도면이다.
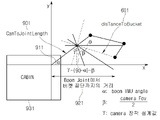
도 9는 본 개시물의 다양한 실시예들에 따른 굴착기의 붐 조인트에서 버켓까지의 거리를 나타내는 도면이다.
도면의 설명과 관련하여, 동일 또는 유사한 구성요소에 대해서는 동일 또는 유사한 참조 부호가 사용될 수 있다.


120: 상부체 122: 운전실
130: 프론트 작업 장치 131: 붐
132: 붐 실린더 133: 암
134: 암 실린더 136: 버켓 실린더
135: 버켓 140: 카메라
Claims (15)
- 굴착기에 있어서,
붐에 배치되어 타겟 객체에 대한 영상을 획득하는 카메라;
상기 붐과 상부체를 회전 가능하게 결합시키는 붐 조인트에 배치되어, 붐에 대한 경사각을 측정하는 적어도 하나의 센서; 및
상기 카메라, 및 상기 적어도 하나의 센서와 전기적으로 연결된 프로세서를 포함하며, 상기 프로세서는,
상기 카메라에서 획득된 영상을 이용하여 상기 카메라에서 상기 타겟 객체까지의 거리를 계산하고,
상기 적어도 하나의 센서로부터 상기 붐에 대한 경사각을 획득하고,
상기 카메라에서 상기 타겟 객체까지의 거리 및 상기 붐에 대한 경사각을 기반으로, 상기 붐 조인트에서 상기 타겟 객체까지의 거리를 결정하는 굴착기.
- 제1항에 있어서,
상기 타겟 객체는, 상기 굴착기의 버켓인 굴착기.
- 제2항에 있어서,
상기 프로세서는, 상기 획득된 영상에서 상기 버켓의 양 끝단의 픽셀 값들을 기반으로, 상기 버켓에 대한 너비를 측정하고,
상기 측정된 너비를 기반으로, 상기 카메라와 상기 버켓 끝단 사이의 거리를 계산하는 굴착기.
- 제3항에 있어서,
상기 프로세서는, 상기 측정된 너비와 상기 버켓의 실측 너비를 기반으로, 상기 카메라에서 상기 버켓에 대한 작동 거리를 계산하고,
상기 계산된 작동 거리를 기반으로, 상기 카메라와 상기 버켓 끝단 사이의 실제 거리를 계산하는 굴착기.
- 제4항에 있어서,
상기 프로세서는, 상기 카메라가 향하는 방향을 기반으로 로컬 좌표계를 생성하고,
상기 생성된 로컬 좌표계를 기반으로, 상기 작동 거리에 대응되는 선분과 상기 실제 거리에 대응되는 선분 사이의 각도를 계산하고,
상기 작동 거리와 상기 계산된 각도를 기반으로, 상기 실제 거리를 계산하는 굴착기.
- 제5항에 있어서,
상기 프로세서는, 상기 실제 거리, 상기 계산된 각도, 상기 카메라에서 상기 붐 조인트까지의 거리, 상기 붐에 대한 경사각, 상기 카메라의 시야각, 및 상기 붐과 상기 카메라의 시야각 중심 사이의 각도를 기반으로, 상기 붐 조인트에서 상기 버켓 끝단까지의 거리를 결정하는 굴착기.
- 제1항에 있어서,
상기 프로세서는,
상기 굴착기의 프론트 작업 장치의 작업 영역을 제한하는 가상 펜스를 설정하고,
결정된 상기 붐 조인트에서 상기 타겟 객체까지의 거리를 기반으로 상기 타겟 객체가 상기 가상 펜스 영역을 벗어나지 않도록 제어하는, 굴착기.
- 굴착기의 동작 방법에 있어서,
붐에 배치된 카메라로부터 영상을 획득하는 동작;
상기 획득된 영상을 기반으로 상기 카메라에서 타겟 객체까지의 거리를 계산하는 동작;
상기 굴착기의 붐 조인트에 배치된 적어도 하나의 센서로부터 상기 붐에 대한 경사각을 획득하는 동작; 및
상기 카메라에서 상기 타겟 객체까지의 거리와 상기 붐에 대한 경사각을 기반으로 상기 붐 조인트에서 상기 타겟 객체까지의 거리를 결정하는 동작을 포함하는 방법.
- 제8항에 있어서,
상기 타겟 객체는 상기 굴착기의 버켓인, 방법.
- 제9항에 있어서,
상기 카메라에서 상기 타겟 객체까지의 거리를 계산하는 동작은,
상기 획득된 영상에서 상기 버켓의 양 끝단의 픽셀 값들을 기반으로, 상기 버켓에 대한 너비를 측정하는 동작; 및
상기 측정된 너비를 기반으로, 상기 카메라와 상기 버켓 끝단 사이의 거리를 계산하는 동작을 포함하는 방법.
- 제10항에 있어서,
상기 카메라와 상기 버켓 끝단 사이의 거리를 계산하는 동작은,
상기 측정된 너비와 상기 버켓의 실측 너비를 기반으로, 상기 카메라에서 상기 타겟 객체에 대한 작동 거리를 계산하는 동작; 및
상기 계산된 작동 거리를 기반으로, 상기 카메라와 상기 버켓 끝단 사이의 실제 거리를 계산하는 동작을 포함하는 방법.
- 제11항에 있어서,
상기 계산된 작동 거리를 기반으로, 상기 카메라와 상기 버켓 끝단 사이의 실제 거리를 계산하는 동작은,
상기 카메라가 향하는 방향을 기반으로 생성되는 로컬 좌표계를 이용하여 상기 작동 거리에 대응되는 선분과 상기 실제 거리에 대응되는 선분 사이의 각도를 계산하는 동작; 및
상기 계산된 작동 거리와 상기 계산된 각도를 기반으로, 상기 실제 거리를 계산하는 동작을 포함하는 방법.
- 제12항에 있어서,
상기 붐 조인트에서 상기 타겟 객체까지의 거리는,
상기 실제 거리, 상기 계산된 각도, 상기 카메라에서 상기 붐 조인트까지의 거리, 상기 붐에 대한 경사각, 상기 카메라의 시야각, 및 상기 붐과 상기 카메라의 시야각 중심 사이의 각도를 기반으로 결정되는 방법.
- 제8항에 있어서, 상기 방법은,
상기 굴착기의 프론트 작업 장치의 작업 영역을 제한하는 가상 펜스를 설정하는 동작; 및
결정된 상기 붐 조인트에서 상기 타겟 객체까지의 거리를 기반으로 상기 타겟 객체가 상기 가상 펜스 영역을 벗어나지 않도록 제어하는 동작을 더 포함하는, 방법.
- 컴퓨터 판독 가능 저장 매체에 있어서,
컴퓨터 상에서 실행될 때, 제8항 내지 제14항 중 어느 하나의 항에 따른 방법을 수행하는 컴퓨터 프로그램을 포함하는 컴퓨터 판독가능 저장 매체.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210037676A KR20220132753A (ko) | 2021-03-24 | 2021-03-24 | 굴착기에서 타겟 객체에 대한 거리를 측정하는 장치 및 그의 동작 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210037676A KR20220132753A (ko) | 2021-03-24 | 2021-03-24 | 굴착기에서 타겟 객체에 대한 거리를 측정하는 장치 및 그의 동작 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220132753A true KR20220132753A (ko) | 2022-10-04 |
Family
ID=83600158
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210037676A Pending KR20220132753A (ko) | 2021-03-24 | 2021-03-24 | 굴착기에서 타겟 객체에 대한 거리를 측정하는 장치 및 그의 동작 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20220132753A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024080526A1 (ko) | 2022-10-14 | 2024-04-18 | 주식회사 엘지에너지솔루션 | 배터리 교환 스테이션 및 이의 동작 방법 |
| KR20260037406A (ko) | 2024-09-10 | 2026-03-17 | 삼성물산 주식회사 | 굴착기 양중 모니터링 시스템, 방법, 및 상기 방법을 실행시키기 위한 컴퓨터 판독 가능한 프로그램을 기록한 기록 매체 |
-
2021
- 2021-03-24 KR KR1020210037676A patent/KR20220132753A/ko active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024080526A1 (ko) | 2022-10-14 | 2024-04-18 | 주식회사 엘지에너지솔루션 | 배터리 교환 스테이션 및 이의 동작 방법 |
| KR20260037406A (ko) | 2024-09-10 | 2026-03-17 | 삼성물산 주식회사 | 굴착기 양중 모니터링 시스템, 방법, 및 상기 방법을 실행시키기 위한 컴퓨터 판독 가능한 프로그램을 기록한 기록 매체 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6987186B2 (ja) | 表示システム、建設機械、及び表示方法 | |
| KR102708684B1 (ko) | 굴삭기, 정보처리장치 | |
| EP3635185B1 (en) | An information system for a working machine | |
| JP7058569B2 (ja) | 作業機械 | |
| CN109661494B (zh) | 作业机械的检测处理装置及作业机械的检测处理方法 | |
| US11732439B2 (en) | Remote control system and main control device | |
| JP6322612B2 (ja) | 施工管理システム及び形状計測方法 | |
| WO2017061518A1 (ja) | 施工管理システム、施工管理方法、及び管理装置 | |
| CN107076555A (zh) | 作业机械的显示系统及作业机械 | |
| CN110494613A (zh) | 工作机械 | |
| US20220316188A1 (en) | Display system, remote operation system, and display method | |
| US12227922B2 (en) | Work machine | |
| JP6585697B2 (ja) | 施工管理システム | |
| WO2018179596A1 (ja) | 建設機械 | |
| CN105829616A (zh) | 作业车和倾斜角度的取得方法 | |
| AU2020212919B2 (en) | System and method for work machine | |
| KR20220132753A (ko) | 굴착기에서 타겟 객체에 대한 거리를 측정하는 장치 및 그의 동작 방법 | |
| WO2023100533A1 (ja) | 画像表示システム、遠隔操作支援システムおよび画像表示方法 | |
| JP7349947B2 (ja) | 情報処理装置、作業機械、情報処理方法、情報処理プログラム | |
| US20230339402A1 (en) | Selectively utilizing multiple imaging devices to maintain a view of an area of interest proximate a work vehicle | |
| JP6606230B2 (ja) | 形状計測システム | |
| JP7544651B2 (ja) | 建設機械 | |
| CN118215772A (zh) | 监视区域设定系统 | |
| JP2025038550A (ja) | 作業システム | |
| KR20240155643A (ko) | 건설 장비의 수치 정보 획득 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| D21 | Rejection of application intended |
Free format text: ST27 STATUS EVENT CODE: A-1-2-D10-D21-EXM-PE0902 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11 | Amendment of application requested |
Free format text: ST27 STATUS EVENT CODE: A-2-2-P10-P11-NAP-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| R11 | Change to the name of applicant or owner or transfer of ownership requested |
Free format text: ST27 STATUS EVENT CODE: A-3-3-R10-R11-ASN-PN2301 (AS PROVIDED BY THE NATIONAL OFFICE) |