KR20220134883A - 맵 생성 방법, 이를 이용한 로봇 원격 제어 방법 및 시스템 - Google Patents
맵 생성 방법, 이를 이용한 로봇 원격 제어 방법 및 시스템 Download PDFInfo
- Publication number
- KR20220134883A KR20220134883A KR1020210040111A KR20210040111A KR20220134883A KR 20220134883 A KR20220134883 A KR 20220134883A KR 1020210040111 A KR1020210040111 A KR 1020210040111A KR 20210040111 A KR20210040111 A KR 20210040111A KR 20220134883 A KR20220134883 A KR 20220134883A
- Authority
- KR
- South Korea
- Prior art keywords
- robot
- node
- information
- nodes
- zone
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/383—Indoor data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0221—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving a learning process
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2101/00—Details of software or hardware architectures used for the control of position
- G05D2101/10—Details of software or hardware architectures used for the control of position using artificial intelligence [AI] techniques
- G05D2101/15—Details of software or hardware architectures used for the control of position using artificial intelligence [AI] techniques using machine learning, e.g. neural networks
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
도 3은 본 발명에 따른 로봇 원격 제어 방법 및 시스템에서, 로봇에서 수집되는 영상 및 로봇의 현재 위치를 추정하는 방법을 설명하기 위한 개념도이다.
도 4는 로봇의 경로 설정에 활용되는 지도 정보를 나타내는 개념도이다.
도 5는 본 발명에 따른 노드맵 설정 방법을 설명하기 위한 흐름도이다.
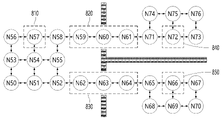
도 6a, 도 6b, 도 6c, 도 6d 및 도 6e는 본 발명에 따른 노드맵 설정 방법을 나타내는 개념도들이다.
도 7a는 본 발명에 따른 노드맵을 활용하여 로봇의 이동 경로를 설정하는 일 실시 예를 설명하기 위한 흐름도이다.
도 7b 및 7c는 본 발명에 따른 노드맵을 활용하여 로봇의 이동 경로를 설정하는 일 실시 예를 설명하기 위한 개념도들이다.
도 8a, 8b, 8c는 본 발명의 일 실시 예에 따른 클러스터링 방법을 나타내는 개념도이다.
도 9a 및 9b는 본 발명의 일 실시 예에 따른 가상 벽 생성 방법을 나타내는 개념도이다.
Claims (21)
- 대상 공간에서 로봇의 이동 경로를 제공하기 위한 맵을 생성하는 방법에 대한 것으로서,
기 설정된 노드 할당 기준에 근거하여, 상기 대상 공간에 대응되도록, 복수의 노드를 할당하는 단계;
상기 대상 공간에 포함된 설비를 기준으로, 상기 복수의 노드에 대해 클러스터링(clustering)을 수행하는 단계;
상기 클러스터링의 수행 결과에 근거하여, 상기 대상 공간을 상기 복수의 노드 중 적어도 하나를 포함하는 복수의 구역으로 구분하는 단계; 및
상기 복수의 노드 및 상기 복수의 구역 간의 구역 연결 정보를 포함하는 상기 대상 공간에 대한 맵을 생성하는 단계를 포함하는 것을 특징으로 하는 맵 생성 방법. - 제1항에 있어서,
상기 구역 연결 정보는,
상기 복수의 구역 중 서로 이웃한 제 1 구역 및 제2 구역에 각각 포함된 노드들에 대한 정보인 것을 특징으로 하는 맵 생성 방법. - 제2항에 있어서,
상기 구역 연결 정보는,
상기 제1 구역에 포함된 노드들 중 상기 제2 구역과 가장 가깝게 배치된 제1 노드의 노드 정보 및
상기 제2 구역에 포함된 노드들 중 상기 제1 구역과 가장 가깝게 배치된 제2 노드의 노드 정보인 것을 특징으로 하는 맵 생성 방법. - 제1항에 있어서,
상기 복수의 노드 각각은,
상기 복수의 노드 각각이 상기 설비와 관련 있는지 여부에 따라, 제1 노드 타입 및 제2 노트 타입 중 어느 하나의 노드 타입을 갖는 것을 특징으로 하는 맵 생성 방법. - 제4항에 있어서,
상기 복수의 노드를 할당하는 단계에서는,
상기 맵에서, 상기 설비가 위치한 곳과 대응되는 영역에 상기 제1 노드 타입을 갖는 적어도 하나의 노드를 할당하고,
상기 설비가 위치한 곳과 대응되지 않는 영역에, 상기 제2 노드 타입을 갖는 적어도 하나의 노드를 할당하는 것을 특징으로 하는 맵 생성 방법. - 제5항에 있어서,
상기 설비가 위치한 곳과 대응되는 영역은,
상기 대상 공간에서 상기 설비가 위치한 특정 지점 및 상기 로봇이 상기 설비를 통과하기 위하여 필수적으로 경유해야 하는 특정 영역 중 적어도 하나와 대응되는 영역인 것을 특징으로 하는 맵 생성 방법. - 제5항에 있어서,
상기 클러스터링을 수행하는 단계에서는,
상기 복수의 노드 중 상기 제1 노드 타입의 노드들이 포함되도록 클러스터링을 수행하여, 상기 제1 노드 타입의 노드들이 포함된 제1 타입의 구역을 특정하고,
상기 복수의 노드 중 상기 제1 타입의 구역에 포함되지 않는 노드들이 포함된 제2 타입의 구역을 특정하는 것을 특징으로 하는 맵 생성 방법. - 제7항에 있어서,
상기 클러스터링을 수행하는 단계에서는,
상기 복수의 노드 중 서로 다른 노드 타입의 노드들이 서로 이웃할 때까지 클러스터링을 수행하는 것을 특징으로 하는 맵 생성 방법. - 제1항에 있어서,
상기 로봇의 목적지 정보를 수신하는 것에 응답하여, 상기 복수의 구역들 중 상기 목적지까지의 이동 경로에 대응되는 적어도 하나의 구역을 추출하고,
상기 추출된 구역에 대한 구역 정보 및 상기 추출된 구역들 간의 구역 연결 정보를 포함하는 이동 경로를 생성하는 단계를 더 포함하는 것을 특징으로 하는 맵 생성 방법. - 제9항에 있어서,
상기 생성된 이동 경로를 따라 이동하는 상기 로봇의 위치를 모니터링하는 단계; 및
모니터링 결과, 상기 로봇이 상기 추출된 구역 중 특정 구역 주변에 위치하는 경우, 상기 특정 구역 내에서 상기 로봇의 이동을 위한 상세 이동 경로를 생성하는 단계를 더 포함하는 것을 특징으로 하는 맵 생성 방법. - 제10항에 있어서,
상기 특정 구역이 상기 설비가 포함된 구역인 경우, 상기 설비의 상태 정보에 근거하여, 상기 상세 이동 경로가 생성되는 것을 특징으로 하는 맵 생성 방법. - 로봇의 이동 경로를 생성하여 로봇을 원격으로 제어하는 방법에 있어서,
상기 로봇의 목적지에 대한 정보를 수신하는 단계;
복수의 구역을 포함하는 맵을 이용하여, 상기 복수의 구역 중 상기 로봇이 상기 목적지에 도달하기 위하여 경유해야 하는 적어도 하나의 경유 구역을 특정하는 단계;
상기 경유 구역을 연결하는 구역 경로를 생성하는 단계; 및
상기 로봇의 이동 정도에 따라, 상기 경유 구역 중 특정 구역에 대한 세부 경로를 생성하는 단계를 포함하는 로봇 원격 제어 방법. - 제12항에 있어서,
상기 맵은 상기 복수의 구역 각각에 포함된 복수의 노드를 포함하고,
상기 세부 경로는,
상기 특정 구역에 포함된 적어도 하나의 노드에 대한 정보를 포함하는 것을 특징으로 하는 로봇 원격 제어 방법. - 제13항에 있어서,
상기 로봇이, 상기 경유 구역 및 상기 특정 구역에 포함된 적어도 하나의 노드를 따라 이동하도록 상기 로봇의 주행을 제어하는 단계를 더 포함하는 것을 특징으로 하는 로봇 원격 제어 방법. - 제14항에 있어서,
상기 세부 이동 경로의 생성 시점은, 상기 로봇이 상기 경유 구역 중 어느 구역에 위치했는지에 근거하여 결정되는 것을 특징으로 하는 로봇 원격 제어 방법. - 제14항에 있어서,
상기 세부 경로는 특정 구역에 포함된 특정 설비와 관련된 설비 정보 및 상기 특정 설비와 관련된 서버로부터 수신한 정보 중 적어도 하나에 기반하여 설정되는 것을 특징으로 하는 로봇 원격 제어 방법. - 제14항에 있어서,
상기 경유 구역은 상기 로봇과 다른 로봇에 할당된 이동 경로, 상기 맵에 포함된 복수의 구역 각각에 대한 설비 정보, 상기 로봇에 할당된 임무 및 상기 복수의 구역 각각의 혼잡도 중 적어도 하나에 기반하여 특정되는 것을 특징으로 하는 로봇 원격 제어 방법. - 제17항에 있어서,
상기 경유 구역은 상기 로봇에 할당된 임무에 대응하는 설비 정보를 포함하는 구역이 포함되도록 특정되는 것을 특징으로 하는 로봇 원격 제어 방법. - 제17항에 있어서,
동일한 설비와 관련된 구역이 복수 개인 경우, 상기 경유 구역은 상기 복수개의 구역 각각의 혼잡도에 기반하여 상기 복수개의 구역 중 일부만 포함하도록 특정되는 것을 특징으로 하는 로봇 원격 제어 방법. - 전자기기에서 하나 이상의 프로세스에 의하여 실행되며, 컴퓨터로 판독될 수 있는 기록매체에 저장 가능한 프로그램으로서,
상기 프로그램은,
로봇의 목적지에 대한 정보를 수신하는 단계;
복수의 구역 및 상기 복수의 구역 각각에 포함된 복수의 노드를 포함하는 맵을 이용하여, 상기 복수의 구역 중 상기 로봇이 상기 목적지에 도달하기 위하여 경유해야 하는 적어도 하나의 경유 구역을 특정하는 단계;
상기 경유 구역을 연결하는 구역 경로를 생성하는 단계; 및
상기 로봇의 이동 정도에 따라, 상기 경유 구역 중 특정 구역에 대한 세부 경로를 생성하는 단계를 수행하도록 하는 명령어들을 포함하고,
상기 세부 경로는,
상기 특정 구역에 포함된 적어도 하나의 노드에 대한 정보를 포함하는 것을 특징으로 하는 컴퓨터로 판독될 수 있는 기록매체에 저장 가능한 프로그램. - 로봇의 이동 경로를 생성하는 로봇을 원격으로 제어하는 시스템에 있어서,
로봇의 목적지에 대한 정보를 수신하는 통신부; 및
복수의 구역 및 상기 복수의 구역 각각에 포함된 복수의 노드를 포함하는 맵을 이용하여, 상기 복수의 구역 중 상기 로봇이 상기 목적지에 도달하기 위하여 경유해야 하는 적어도 하나의 경유 구역을 특정하고,
상기 경유 구역을 연결하는 구역 경로를 생성하고,
상기 로봇의 이동 정도에 따라, 상기 경유 구역 중 특정 구역에 대한 세부 경로를 생성하는 제어부를 포함하고,
상기 세부 경로는,
상기 특정 구역에 포함된 적어도 하나의 노드에 대한 정보를 포함하는 것을 특징으로 로봇 원격 제어 시스템.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210040111A KR102671223B1 (ko) | 2021-03-29 | 2021-03-29 | 맵 생성 방법, 이를 이용한 로봇 원격 제어 방법 및 시스템 |
| KR1020210081075A KR102675760B1 (ko) | 2021-03-29 | 2021-06-22 | 실내 공간에 배치된 설비를 이용하는 복수의 로봇이 주행하는 건물 |
| KR1020240076170A KR20240093425A (ko) | 2021-03-29 | 2024-06-12 | 맵 생성 방법, 이를 이용한 로봇 원격 제어 방법 및 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210040111A KR102671223B1 (ko) | 2021-03-29 | 2021-03-29 | 맵 생성 방법, 이를 이용한 로봇 원격 제어 방법 및 시스템 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210081075A Division KR102675760B1 (ko) | 2021-03-29 | 2021-06-22 | 실내 공간에 배치된 설비를 이용하는 복수의 로봇이 주행하는 건물 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20220134883A true KR20220134883A (ko) | 2022-10-06 |
| KR102671223B1 KR102671223B1 (ko) | 2024-06-03 |
Family
ID=83597026
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210040111A Active KR102671223B1 (ko) | 2021-03-29 | 2021-03-29 | 맵 생성 방법, 이를 이용한 로봇 원격 제어 방법 및 시스템 |
| KR1020210081075A Active KR102675760B1 (ko) | 2021-03-29 | 2021-06-22 | 실내 공간에 배치된 설비를 이용하는 복수의 로봇이 주행하는 건물 |
| KR1020240076170A Ceased KR20240093425A (ko) | 2021-03-29 | 2024-06-12 | 맵 생성 방법, 이를 이용한 로봇 원격 제어 방법 및 시스템 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210081075A Active KR102675760B1 (ko) | 2021-03-29 | 2021-06-22 | 실내 공간에 배치된 설비를 이용하는 복수의 로봇이 주행하는 건물 |
| KR1020240076170A Ceased KR20240093425A (ko) | 2021-03-29 | 2024-06-12 | 맵 생성 방법, 이를 이용한 로봇 원격 제어 방법 및 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (3) | KR102671223B1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102626500B1 (ko) * | 2022-12-30 | 2024-01-18 | 한국로봇융합연구원 | 로봇 청소 시스템 및 오염물 확산 맵을 통한 오염물 추정 방법 |
| KR102626501B1 (ko) * | 2022-12-30 | 2024-01-18 | 한국로봇융합연구원 | 로봇 청소 시스템 및 오염물 확산 맵을 통한 오염량 산출 방법 |
| WO2025015765A1 (zh) * | 2023-07-19 | 2025-01-23 | 浙江白马科技有限公司 | 机器人路径规划方法、装置、电子设备及介质 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102573512B1 (ko) * | 2022-11-09 | 2023-09-04 | 주식회사 클로봇 | 이동 로봇을 엘리베이터에 탑승시키기 위한 방법 및 서버 |
| WO2024257464A1 (ja) * | 2023-06-14 | 2024-12-19 | 村田機械株式会社 | 経路生成システム |
| CN119610142B (zh) * | 2025-02-14 | 2025-05-13 | 徐州思润智能科技有限公司 | 一种智能化特种机器人便携式图数一体遥控系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS532016B2 (ko) * | 1972-07-17 | 1978-01-24 | ||
| KR20190003124A (ko) * | 2017-06-30 | 2019-01-09 | 엘지전자 주식회사 | 이동 로봇의 동작 방법 |
| JP2019139097A (ja) * | 2018-02-13 | 2019-08-22 | 日本電信電話株式会社 | ネットワークデータ生成装置、ネットワークデータ生成方法、およびプログラム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5302016B2 (ja) * | 2009-01-15 | 2013-10-02 | 株式会社日立製作所 | 空間情報管理システム、及び地図情報サーバ装置、並びに、プログラム |
| KR102281588B1 (ko) * | 2019-07-08 | 2021-07-26 | 씨제이올리브네트웍스 주식회사 | 운송 로봇의 실내자율주행 시스템 |
-
2021
- 2021-03-29 KR KR1020210040111A patent/KR102671223B1/ko active Active
- 2021-06-22 KR KR1020210081075A patent/KR102675760B1/ko active Active
-
2024
- 2024-06-12 KR KR1020240076170A patent/KR20240093425A/ko not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS532016B2 (ko) * | 1972-07-17 | 1978-01-24 | ||
| KR20190003124A (ko) * | 2017-06-30 | 2019-01-09 | 엘지전자 주식회사 | 이동 로봇의 동작 방법 |
| JP2019139097A (ja) * | 2018-02-13 | 2019-08-22 | 日本電信電話株式会社 | ネットワークデータ生成装置、ネットワークデータ生成方法、およびプログラム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102626500B1 (ko) * | 2022-12-30 | 2024-01-18 | 한국로봇융합연구원 | 로봇 청소 시스템 및 오염물 확산 맵을 통한 오염물 추정 방법 |
| KR102626501B1 (ko) * | 2022-12-30 | 2024-01-18 | 한국로봇융합연구원 | 로봇 청소 시스템 및 오염물 확산 맵을 통한 오염량 산출 방법 |
| WO2025015765A1 (zh) * | 2023-07-19 | 2025-01-23 | 浙江白马科技有限公司 | 机器人路径规划方法、装置、电子设备及介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102675760B1 (ko) | 2024-06-14 |
| KR20240093425A (ko) | 2024-06-24 |
| KR20220135138A (ko) | 2022-10-06 |
| KR102671223B1 (ko) | 2024-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102675760B1 (ko) | 실내 공간에 배치된 설비를 이용하는 복수의 로봇이 주행하는 건물 | |
| KR102489722B1 (ko) | 엘리베이터의 최적 대기 위치에 탑승하는 로봇이 주행하는 건물 | |
| KR20240131309A (ko) | 로봇 주행 제어 방법 및 시스템 | |
| JP2019508665A (ja) | 半自律的モバイルロボットのナビゲーティング | |
| KR102650059B1 (ko) | 로봇 친화형 건물, 로봇 및 건물을 주행하는 멀티-로봇 제어 시스템 | |
| KR102315361B1 (ko) | 실내 공간을 주행하는 로봇의 동작을 평가하는 건물 | |
| KR102489723B1 (ko) | 로봇 원격 제어 방법 및 시스템 | |
| US12449823B1 (en) | Method and system for loading trays in delivery robots within a multi-story building | |
| KR102486153B1 (ko) | 장애물에 유연하게 대처하는 로봇이 주행하는 건물 | |
| KR102513728B1 (ko) | 로봇 원격 제어 방법 및 시스템 | |
| KR102484770B1 (ko) | 로봇의 통신 장애 복구 방법 및 시스템 | |
| KR20230171826A (ko) | 로봇 친화형 건물, 로봇 운용을 위한 맵 생성 방법 및 시스템 | |
| KR102691154B1 (ko) | 공간의 혼잡도에 기반하여 이동 경로가 제어되는 로봇이 주행하는 건물 | |
| KR102462635B1 (ko) | 실내 공간을 주행하는 로봇의 동작을 평가하는 건물 | |
| KR102494840B1 (ko) | 네트워크 장애 상황에 강인한 로봇이 주행하는 건물 | |
| KR102485644B1 (ko) | 통신 지연에 강인한 로봇이 주행하는 건물 | |
| KR102891425B1 (ko) | 로봇 친화형 건물, 건물을 주행하는 로봇 제어 방법 및 시스템 | |
| KR102913734B1 (ko) | 로봇 친화형 건물, 건물을 주행하는 로봇 제어 방법 및 시스템 | |
| JP2022040060A (ja) | ロボット管制方法及びシステム | |
| KR102706696B1 (ko) | 로봇 친화형 건물, 건물을 주행하는 로봇 제어 방법 및 시스템 | |
| KR102821092B1 (ko) | 로봇 친화형 건물, 건물을 주행하는 로봇 제어 방법 및 시스템 | |
| KR102950480B1 (ko) | 로봇 제어 방법 및 시스템 | |
| KR20260019413A (ko) | 계층적 공간 정보 기반의 지도 제공 시스템 | |
| JP2025121591A (ja) | 情報処理システム、情報処理方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PA0107 | Divisional application |
St.27 status event code: A-0-1-A10-A18-div-PA0107 St.27 status event code: A-0-1-A10-A16-div-PA0107 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R14-asn-PN2301 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |