KR20220143101A - 시중 장치 - Google Patents
시중 장치 Download PDFInfo
- Publication number
- KR20220143101A KR20220143101A KR1020227032230A KR20227032230A KR20220143101A KR 20220143101 A KR20220143101 A KR 20220143101A KR 1020227032230 A KR1020227032230 A KR 1020227032230A KR 20227032230 A KR20227032230 A KR 20227032230A KR 20220143101 A KR20220143101 A KR 20220143101A
- Authority
- KR
- South Korea
- Prior art keywords
- armpit support
- armpit
- pair
- support
- person
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/10—Devices for lifting patients or disabled persons, e.g. special adaptations of hoists thereto
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
- A61G5/14—Standing-up or sitting-down aids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/10—Devices for lifting patients or disabled persons, e.g. special adaptations of hoists thereto
- A61G7/104—Devices carried or supported by
- A61G7/1046—Mobile bases, e.g. having wheels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/10—Devices for lifting patients or disabled persons, e.g. special adaptations of hoists thereto
- A61G7/1049—Attachment, suspending or supporting means for patients
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nursing (AREA)
- Orthopedics, Nursing, And Contraception (AREA)
- Invalid Beds And Related Equipment (AREA)
- Rehabilitation Tools (AREA)
Abstract
Description
도 2는 동체 지지부 및 겨드랑이 지지부를 포함한 지지 부재를 후방으로부터 본 도이다.
도 3은 도 2의 III-III 단면에 나타내는 겨드랑이 지지부의 단면도이다.
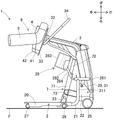
도 4는 제1 실시 형태의 시중 장치의 작용을 설명하는 도이다.
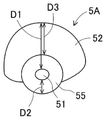
도 5는 제2 실시 형태의 겨드랑이 지지부의 후(後)부를 후방으로부터 본 도이다.
도 6은 제2 실시 형태의 시중 장치의 작용을 설명하는 도이다.
도 7은 제3 실시 형태의 시중 장치에 있어서, 제한 기구 및 조정부의 한 형태에 상당하는 제한 벨트(belt) 및 조정 버클(buckle)을 나타내는 사시도이다.
도 8은 제한 벨트 및 조정 버클의 기능을 설명하는 도이다.
도 9는 제3 실시 형태의 시중 장치의 작용을 설명하는 도이다.
도 10은 제4 실시 형태의 시중 장치의 제한 기구 및 조정부를 모식적으로 나타내는 도이다.
도 11은 각 실시 형태에 추가할 수 있는 겨드랑이 지지 어시스트(assist) 기구를 설명하는 사시도이다.
20:풋 플레이트(foot plate)
21:파이프 프레임(pipe frame)
22:조립 프레임 3:암(arm) 부재
33:베이스 플레이트(base plate)
34:핸들(handle) 4:상체 지지부
5, 5A, 5B:겨드랑이 지지부
51:심(芯) 부재 52:외주(外周) 부재
53:통상(通常) 커버 부재
54:마찰 저감 커버 부재
55:중간 부재 56:부착판
57:소정 위치 58:제한 위치
6:지지 부재
7:액츄에이터(actuator)
81:제한 벨트(belt) 82:정점 위치
83:조정 버클(buckle) 86:제한 핀(pin)
87:제한 로드(rod) 88:로드 위치 조정부
9:겨드랑이 지지 어시스트(assist) 기구
Claims (15)
- 기대와,
피시중자의 좌우의 겨드랑이를 각각 지지하는 한 벌의 겨드랑이 지지부와,
상기 기대를 기준으로 하여 한 벌의 상기 겨드랑이 지지부를 적어도 상하 방향으로 이동시키는 구동부를 구비하는 시중 장치로서,
상기 겨드랑이 지지부는, 상기 피시중자의 적어도 상기 겨드랑이 및 상완부에 접촉하는 통상 표면부와, 상기 통상 표면부보다도 작은 마찰 계수를 가지고 상기 피시중자의 옆구리부에 접촉하는 마찰 저감 표면부를 가지는 시중 장치. - 제1항에 있어서,
상기 겨드랑이 지지부는,
심 부재와,
상기 심 부재를 덮으면서 탄성 변형이 가능한 외주 부재와,
상기 외주 부재를 덮고, 상기 통상 표면부를 구성하는 통상 커버 부재와,
상기 외주 부재를 덮고, 상기 마찰 저감 표면부를 구성하는 마찰 저감 커버 부재를 가지는 시중 장치. - 제2항에 있어서,
상기 마찰 저감 커버 부재는, 상기 통상 커버 부재의 외면에 겹쳐서 배치되는 시중 장치. - 제2항 또는 제3항에 있어서,
상기 통상 커버 부재는, 그 표면이 상대적으로 거친 합성 피혁이고, 상기 마찰 저감 커버 부재는, 그 표면이 상대적으로 매끄러운 합성 수지제 시트인 시중 장치. - 제1항 내지 제4항 중 어느 한 항에 있어서,
상기 겨드랑이 지지부는,
심 부재와,
상기 심 부재를 덮으면서 탄성 변형이 가능하고, 그 중심보다도 하방에 상기 심 부재가 배치되는 외주 부재를 가지는 시중 장치. - 기대와,
피시중자의 좌우의 겨드랑이를 각각 지지하는 한 벌의 겨드랑이 지지부와,
상기 기대를 기준으로 하여, 한 벌의 상기 겨드랑이 지지부를 적어도 상하 방향으로 이동시키는 구동부를 구비하는 시중 장치로서,
상기 겨드랑이 지지부는,
심 부재와,
상기 심 부재를 덮으면서 탄성 변형이 가능하고, 그 중심보다도 하방에 상기 심 부재가 배치되는 외주 부재를 가지는 시중 장치. - 제5항 또는 제6항에 있어서,
상기 외주 부재는, 상기 심 부재를 덮는 통 형상으로 형성되고, 상측의 두께가 하측의 두께보다 큰 시중 장치. - 제5항 또는 제6항에 있어서,
상기 외주 부재는, 상기 심 부재의 상측을 덮고, 상기 심 부재의 하측을 덮지 않는 시중 장치. - 제1항 내지 제8항 중 어느 한 항에 있어서,
한 벌의 상기 겨드랑이 지지부는, 서로 접근 또는 이간하는 방향으로 요동 가능 또는 이동 가능하고,
한 벌의 상기 겨드랑이 지지부가 서로 접근하는 방향의 요동 범위 또는 이동 범위를 제한하는 제한 기구를 더 구비하는 시중 장치. - 기대와,
피시중자의 좌우의 겨드랑이를 각각 지지함과 아울러, 서로 접근 또는 이간하는 방향으로 요동 가능 또는 이동 가능한 한 벌의 겨드랑이 지지부와,
상기 기대를 기준으로 하여, 한 벌의 상기 겨드랑이 지지부를 적어도 상하 방향으로 이동시키는 구동부와,
한 벌의 상기 겨드랑이 지지부가 서로 접근하는 방향의 요동 범위 또는 이동 범위를 제한하는 제한 기구를 구비하는 시중 장치. - 제9항 또는 제10항에 있어서,
상기 겨드랑이 지지부의 소정 위치가 요동 가능하게 지지되어 있고,
상기 제한 기구는, 상기 겨드랑이 지지부의 상기 소정 위치 이외의 제한 위치와, 상기 겨드랑이 지지부와 일체적으로 이동하는 부재에 설치된 정점 위치를 묶는 제한 벨트인 시중 장치. - 제11항에 있어서,
상기 제한 벨트는, 일방의 상기 겨드랑이 지지부의 상기 제한 위치와, 타방의 상기 겨드랑이 지지부의 상기 제한 위치를 묶으면서, 상기 정점 위치에서 슬라이딩 가능하게 되접어 꺾이는 시중 장치. - 제9항 내지 제12항 중 어느 한 항에 있어서,
상기 피시중자의 체격에 응하여, 상기 제한 기구가 제한하는 상기 요동 범위 또는 상기 이동 범위를 조정하는 조정부를 더 구비하는 시중 장치. - 제11항 또는 제12항에 있어서,
상기 피시중자의 체격에 응하여 상기 제한 벨트의 길이를 조정하는 조정 버클을 더 구비하는 시중 장치. - 제1항 내지 제14항 중 어느 한 항에 있어서,
한 벌의 상기 겨드랑이 지지부에 작용하는 하향의 하중에 응하여, 한 벌의 상기 겨드랑이 지지부를 서로 접근하는 방향으로 요동 또는 이동시키는 겨드랑이 지지 어시스트 기구를 더 구비하는 시중 장치.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/019829 WO2021234827A1 (ja) | 2020-05-19 | 2020-05-19 | 介助装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20220143101A true KR20220143101A (ko) | 2022-10-24 |
| KR102822222B1 KR102822222B1 (ko) | 2025-06-17 |
Family
ID=78708420
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227032230A Active KR102822222B1 (ko) | 2020-05-19 | 2020-05-19 | 시중 장치 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP7420931B2 (ko) |
| KR (1) | KR102822222B1 (ko) |
| CN (1) | CN115484914B (ko) |
| WO (1) | WO2021234827A1 (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12036152B2 (en) | 2022-06-08 | 2024-07-16 | Kenneth G. Stewart, III | Rigid mobility device |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005192779A (ja) * | 2004-01-07 | 2005-07-21 | Sakai Medical Co Ltd | ボディホルダー |
| JP2008073485A (ja) * | 2006-09-20 | 2008-04-03 | Junko Ujihara | 松葉杖のサポート用具 |
| WO2015011838A1 (ja) * | 2013-07-26 | 2015-01-29 | 富士機械製造株式会社 | 保持具および介助ロボット |
| WO2017009946A1 (ja) * | 2015-07-14 | 2017-01-19 | 富士機械製造株式会社 | 介助ロボット |
| WO2018179294A1 (ja) | 2017-03-30 | 2018-10-04 | 株式会社Fuji | 介助装置 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2660144B2 (ja) * | 1992-10-29 | 1997-10-08 | 繁雄 石岡 | 介護用移動手段付き装置 |
| US20070074749A1 (en) * | 2005-10-05 | 2007-04-05 | Jones Kathleen M | Padding for crutches |
| US8157757B2 (en) * | 2010-03-08 | 2012-04-17 | Sastry K Ganti | Special bed to self induce body traction |
| JP2012187284A (ja) * | 2011-03-10 | 2012-10-04 | Yoshiro Nakamatsu | 抗重力縦伸歩行装置 |
| US20150182403A1 (en) * | 2013-01-18 | 2015-07-02 | Yi-Je Lim | A Mobile Robotic Lifting and Transferring System for Bariatric Patients |
| CN203790177U (zh) * | 2014-04-09 | 2014-08-27 | 曹妍妍 | 一种分体式易操作骨科护理床 |
| WO2016077658A2 (en) * | 2014-11-14 | 2016-05-19 | Coppens Daniel D | Patient transfer device and associated systems and methods |
| WO2017061151A1 (ja) * | 2015-10-06 | 2017-04-13 | 富士機械製造株式会社 | 介助装置 |
| WO2017199349A1 (ja) * | 2016-05-17 | 2017-11-23 | 富士機械製造株式会社 | 介助装置 |
| CA3024708A1 (en) * | 2016-05-27 | 2017-11-30 | Evelyn & Bobbie, LLC | Garment frame, support structure, casing, and housing |
| CN109219573B (zh) * | 2016-06-28 | 2021-08-06 | 株式会社久保田 | 辅助套装 |
| JP6767566B2 (ja) * | 2017-03-31 | 2020-10-14 | 株式会社Fuji | 介助装置 |
| AU2017406690B2 (en) * | 2017-03-31 | 2020-11-26 | Fuji Corporation | Assistance device |
| CN209827313U (zh) * | 2018-12-12 | 2019-12-24 | 广东东品美容医疗科技有限公司 | 多功能理疗床 |
| CN210189813U (zh) * | 2019-07-09 | 2020-03-27 | 萍乡学院 | 辅助站立机器人 |
| CN110974575A (zh) * | 2019-12-25 | 2020-04-10 | 首都医科大学宣武医院 | 一种行动不便的患者用辅助支撑装置及其使用方法 |
-
2020
- 2020-05-19 JP JP2022523799A patent/JP7420931B2/ja active Active
- 2020-05-19 WO PCT/JP2020/019829 patent/WO2021234827A1/ja not_active Ceased
- 2020-05-19 CN CN202080100210.1A patent/CN115484914B/zh active Active
- 2020-05-19 KR KR1020227032230A patent/KR102822222B1/ko active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005192779A (ja) * | 2004-01-07 | 2005-07-21 | Sakai Medical Co Ltd | ボディホルダー |
| JP2008073485A (ja) * | 2006-09-20 | 2008-04-03 | Junko Ujihara | 松葉杖のサポート用具 |
| WO2015011838A1 (ja) * | 2013-07-26 | 2015-01-29 | 富士機械製造株式会社 | 保持具および介助ロボット |
| WO2017009946A1 (ja) * | 2015-07-14 | 2017-01-19 | 富士機械製造株式会社 | 介助ロボット |
| WO2018179294A1 (ja) | 2017-03-30 | 2018-10-04 | 株式会社Fuji | 介助装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021234827A1 (ko) | 2021-11-25 |
| CN115484914A (zh) | 2022-12-16 |
| WO2021234827A1 (ja) | 2021-11-25 |
| JP7420931B2 (ja) | 2024-01-23 |
| KR102822222B1 (ko) | 2025-06-17 |
| CN115484914B (zh) | 2024-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1401306B1 (en) | Seats | |
| CN103097182B (zh) | 车辆用座椅及车辆用座椅的刚性设定方法 | |
| JP6714766B2 (ja) | 介助装置 | |
| WO2019111356A1 (ja) | 介助装置 | |
| JP6704508B2 (ja) | 介助装置 | |
| US8894591B2 (en) | Walking assistance device | |
| JP4919633B2 (ja) | 車椅子 | |
| JPH10151033A (ja) | 椅 子 | |
| KR20220143101A (ko) | 시중 장치 | |
| JP6923398B2 (ja) | クッションおよび車椅子 | |
| JP6898507B2 (ja) | 介助装置 | |
| WO2007080667A1 (ja) | 座席構造 | |
| KR102490709B1 (ko) | 시중 장치 | |
| JPWO2018179431A1 (ja) | 介助装置 | |
| JPWO2018179294A1 (ja) | 介助装置 | |
| JPS6122501Y2 (ko) | ||
| JPH0527090Y2 (ko) | ||
| JPH0529651Y2 (ko) | ||
| JPH0956749A (ja) | 立ち上がり補助椅子 | |
| JPH08117053A (ja) | 車輛用シートにおけるクッションパッドの支持装置 | |
| JP2013000447A (ja) | 椅子 | |
| JPWO2020208700A1 (ja) | 介助装置 | |
| JP2006325742A (ja) | 客席用シート | |
| JP2007159842A (ja) | 椅子 | |
| JPH0824074A (ja) | ランバーサポート機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20220916 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20240826 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20250423 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20250613 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20250613 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |