KR20220143778A - 가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 - Google Patents
가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 Download PDFInfo
- Publication number
- KR20220143778A KR20220143778A KR1020227035598A KR20227035598A KR20220143778A KR 20220143778 A KR20220143778 A KR 20220143778A KR 1020227035598 A KR1020227035598 A KR 1020227035598A KR 20227035598 A KR20227035598 A KR 20227035598A KR 20220143778 A KR20220143778 A KR 20220143778A
- Authority
- KR
- South Korea
- Prior art keywords
- instrument shaft
- assembly
- actuation rod
- tension member
- actuation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000012636 effector Substances 0.000 title claims abstract description 80
- 238000000034 method Methods 0.000 claims abstract description 42
- 238000002955 isolation Methods 0.000 claims description 43
- 230000008878 coupling Effects 0.000 claims description 3
- 238000010168 coupling process Methods 0.000 claims description 3
- 238000005859 coupling reaction Methods 0.000 claims description 3
- 238000003780 insertion Methods 0.000 claims description 2
- 230000037431 insertion Effects 0.000 claims description 2
- 238000001356 surgical procedure Methods 0.000 description 19
- 230000013011 mating Effects 0.000 description 10
- 230000007246 mechanism Effects 0.000 description 8
- 238000003384 imaging method Methods 0.000 description 7
- 238000009434 installation Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 238000002405 diagnostic procedure Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000014509 gene expression Effects 0.000 description 4
- 238000013519 translation Methods 0.000 description 4
- 210000001015 abdomen Anatomy 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000001839 endoscopy Methods 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 238000002357 laparoscopic surgery Methods 0.000 description 2
- 238000002324 minimally invasive surgery Methods 0.000 description 2
- 230000008447 perception Effects 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 206010028980 Neoplasm Diseases 0.000 description 1
- 210000000683 abdominal cavity Anatomy 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 201000011510 cancer Diseases 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000002574 cystoscopy Methods 0.000 description 1
- 238000011846 endoscopic investigation Methods 0.000 description 1
- 210000001035 gastrointestinal tract Anatomy 0.000 description 1
- 238000012978 minimally invasive surgical procedure Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000002432 robotic surgery Methods 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 230000002792 vascular Effects 0.000 description 1
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2902—Details of shaft characterized by features of the actuating rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Robotics (AREA)
- Ophthalmology & Optometry (AREA)
- Surgical Instruments (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Manipulator (AREA)
Abstract
Description
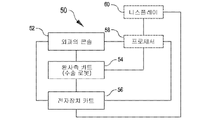
도 2는 다수의 실시예에 따른 로봇 수술 시스템을 위한 외과의 제어 콘솔의 사시도이다.
도 3은 다수의 실시예에 따른 로봇 수술 시스템 전자장치 카트의 사시도이다.
도 4는 다수의 실시예에 따른 로봇 수술 시스템을 개략적으로 도시한 도면이다.
도 5는 다수의 실시예에 따른 로봇 수술 시스템의 환자측 카트(수술 로봇)의 정면도이다.
도 6은 다수의 실시예에 따른 로봇 수술 툴을 도시한 도면이다.
도 7a 및 도 7b는 다수의 실시예에 따른, 엔드 이펙터 및 엔드 이펙터에 푸시/풀 작동력을 전달하기 위한 케이블 구동식 기구를 포함하는 수술 툴을 도시한 간략화된 개략도이다.
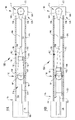
도 8은 도 7a 및 도 7b의 수술 툴의 하나의 실시예의 평면도이다.
도 9는 도 8의 수술 툴의 엔드 이펙터에 푸시/풀 작동력을 전달하기 위한 케이블 구동식 기구의 구성요소를 도시한 평면도이다.
도 10은 도 8의 수술 툴의 엔드 이펙터에 푸시/풀 작동력을 전달하기 위한 케이블 구동식 기구의 구성요소를 보여주는 확대도이다.
도 11 및 도 12는 도 8의 수술 툴의 엔드 이펙터에 푸시/풀 작동력을 전달하기 위해 케이블 구동식 기구의 케이블을 작동시키도록 작동 가능한 근위 작동 기구의 도면이다.
도 13a 및 도 13b는 다수의 실시예에 따른, 엔드 이펙터 및 엔드 이펙터에 푸시/풀 작동력을 전달하기 위한 밴드 구동식 기구를 포함하는 수술 툴을 도시한 간략화된 개략도이다.
도 14는 도 13a 및 도 13b의 수술 툴의 하나의 실시예의 평면도이다.
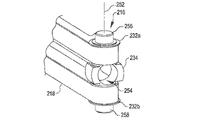
도 15 및 도 16은 도 14의 수술 툴의 엔드 이펙터에 푸시/풀 작동력을 전달하기 위한 밴드 구동식 기구의 밴드 구동식 셔틀을 도시하는 확대도이다.
도 17은 도 14의 수술 툴의 엔드 이펙터에 푸시/풀 작동력을 전달하기 위한 밴드 구동식 기구의 구동 밴드 단부 지지부를 도시한 확대도이다.
Claims (20)
- 수술 툴에 있어서,
근위 작동 어셈블리;
엔드 이펙터;
내강을 한정하는 기기 샤프트를 포함하는 기기 샤프트 어셈블리 및 내강 내로 연장되는 작동 로드를 포함하는 작동 로드 어셈블리로서, 기기 샤프트는 엔드 이펙터를 지지하고, 작동 로드는 엔드 이펙터와 구동 가능하게 연결되는, 기기 샤프트 어셈블리 및 작동 로드 어셈블리; 및
작동 로드를 근위 작동 어셈블리에 구동 가능하게 연결시키는 가요성 인장 부재로서, 근위 작동 어셈블리는 엔드 이펙터를 작동시키기 위해 엔드 이펙터를 향해 작동 로드를 이동시켜 가요성 인장 부재의 장력을 증가시키도록 작동 가능한, 가요성 인장 부재를 포함하는 것을 특징으로 하는 수술 툴. - 제 1 항에 있어서,
근위 작동 어셈블리는 작동 로드를 엔드 이펙터로부터 먼 쪽으로 이동시키기 위해 가요성 인장 부재의 장력을 증가시키도록 작동 가능한 것을 특징으로 하는 수술 툴. - 제 2 항에 있어서,
근위 작동 어셈블리는 기기 샤프트를 지지하는 근위 섀시에 대해 기기 샤프트를 회전시키도록 작동 가능하고,
작동 로드는 기기 샤프트와 함께 회전하도록 구속되고;
기기 샤프트 어셈블리는 가요성 인장 부재가 연장되어 통과하는 격리 튜브를 포함하고, 격리 튜브는 격리 튜브를 에워싸는 내강 영역으로부터 가요성 인장 부재를 격리시키는 것을 특징으로 하는 수술 툴. - 제 2 항에 있어서, 기기 샤프트 어셈블리는 가요성 인장 부재와 계면 접촉하는 풀리를 포함하는 것을 특징으로 하는 수술 툴.
- 제 4 항에 있어서, 작동 로드 어셈블리는 가요성 인장 부재가 연장되어 통과하는 구멍을 포함하는 것을 특징으로 하는 수술 툴.
- 제 1 항에 있어서, 기기 샤프트는 작동 로드 어셈블리 및 가요성 인장 부재의 내강 내로의 삽입을 수용하도록 구성 가능한 것을 특징으로 하는 수술 툴.
- 제 6 항에 있어서, 작동 로드 어셈블리는 제1 방향으로 돌출하는 제1 가이드 피처 및 제1 방향과 상이한 제2 방향으로 돌출하는 제2 가이드 피처를 포함하는 것을 특징으로 하는 수술 툴.
- 제 1 항에 있어서,
가요성 인장 부재는 구동 밴드를 포함하고;
구동 밴드는 작동 로드 어셈블리의 일부분이 연장되어 통과하는 슬롯을 포함하는 것을 특징으로 하는 수술 툴. - 제 8 항에 있어서, 기기 샤프트 어셈블리는:
작동 로드 어셈블리의 일부분이 연장되어 통과하는 구멍을 가지는 지지부 프레임; 및
지지부 프레임에 장착되고 구동 밴드와 계면 접촉하는 베어링을 포함하는 것을 특징으로 하는 수술 툴. - 제 8 항에 있어서, 작동 로드 어셈블리는 구동 밴드가 연장되어 통과하는 구동 밴드 가이드 구멍을 포함하는 것을 특징으로 하는 수술 툴.
- 수술 툴의 엔드 이펙터를 작동시키기 위한 방법에 있어서,
내강을 한정하는 기기 샤프트를 통해 엔드 이펙터를 지지하는 단계;
내강 내에서 작동 로드 어셈블리를 지지하는 단계로서, 작동 로드 어셈블리는 엔드 이펙터과 구동 가능하게 연결되는 작동 로드를 포함하는, 지지 단계; 및
엔드 이펙터를 작동시키기 위해 엔드 이펙터를 향해 작동 로드를 이동시켜 작동 로드와 연결된 가요성 인장 부재의 장력을 증가시키도록 근위 작동 어셈블리를 작동시키는 단계를 포함하는 것을 특징으로 하는 방법. - 제 11 항에 있어서, 작동 로드를 엔드 이펙터로부터 먼 쪽으로 이동시키기 위해 근위 작동 어셈블리를 작동시키는 단계를 추가로 포함하는 것을 특징으로 하는 방법.
- 제 12 항에 있어서,
기기 샤프트를 지지하는 근위 섀시에 대해 기기 샤프트 축 둘레로 기기 샤프트를 회전시키도록 근위 작동 어셈블리를 작동시키는 단계;
기기 샤프트 축 둘레로 기기 샤프트와 함께 회전하도록 작동 로드를 구속하는 단계; 및
격리 튜브를 에워싸는 내강 영역으로부터 상호 얽힘 가능한 길이 부분을 격리시키기 위해 작동 로드와 근위 작동 어셈블리 사이에 배치되는 가요성 인장 부재의 상호 얽힘 가능한 길이 부분을 격리 튜브 내에 둘러싸 넣는 단계를 추가로 포함하는 것을 특징으로 하는 방법. - 제 12 항에 있어서, 근위 작동 어셈블리는 가요성 인장 부재와 계면 접촉하는 풀리에 대한 이동의 범위에 걸쳐 작동 로드를 이동시키도록 작동되는 것을 특징으로 하는 방법.
- 제 14 항에 있어서, 가요성 인장 부재가 연장되어 통과하는 작동 로드 어셈블리 내의 가이드 구멍을 통해 가요성 인장 부재를 가이드하는 단계를 추가로 포함하는 것을 특징으로 하는 방법.
- 제 11 항에 있어서,
작동 로드 어셈블리 및 가요성 인장 부재를 기기 샤프트의 제1 부분 내로 삽입하는 단계; 및
작동 로드 어셈블리 및 가요성 인장 부재의 일부분을 기기 샤프트의 내강 내에 둘러싸 넣기 위해 기기 샤프트의 제2 부분을 기기 샤프트의 제1 부분에 결합시키는 단계를 추가로 포함하는 것을 특징으로 하는 방법. - 제 16 항에 있어서,
가요성 인장 부재와 계면 접촉하는 가이드 표면에 대한 이동의 범위에 걸쳐 작동 로드를 이동시키기 위해 근위 작동 어셈블리를 작동시키는 단계; 및
이동의 범위에 걸쳐 기기 샤프트에 대한 작동 로드의 이동을 가이드하기 위해 작동 로드의 돌출하는 가이드 피처를 기기 샤프트에 계면 접촉시키는 단계를 추가로 포함하는 것을 특징으로 하는 방법. - 제 11 항에 있어서, 가요성 인장 부재는 작동 로드가 연장되어 통과하는 슬롯을 포함하는 구동 밴드를 포함하는 것을 특징으로 하는 방법.
- 제 18 항에 있어서,
기기 샤프트를 통해 지지부 프레임을 지지하는 단계;
지지부 프레임을 통과하는 구멍 내에 작동 로드의 일부분을 수용하는 단계;
가이드 표면 축 둘레로 회전하기 위해 지지부 프레임에 장착되는 제1 베어링을 지지하는 단계로서, 구동 밴드는 제1 베어링과 계면 접촉하는, 지지 단계; 및
가이드 표면 축 둘레로 회전하기 위해 지지부 프레임에 장착되는 제2 베어링을 지지하는 단계로서, 구동 밴드는 제2 베어링과 계면 접촉하는, 지지 단계를 추가로 포함하는 것을 특징으로 하는 방법. - 제 18 항에 있어서, 구동 밴드가 연장되어 통과하는 작동 로드 어셈블리의 구동 밴드 가이드 구멍을 통해 구동 밴드를 가이드하는 단계를 추가로 포함하는 것을 특징으로 하는 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020247013256A KR102871113B1 (ko) | 2016-09-09 | 2017-09-08 | 가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662385642P | 2016-09-09 | 2016-09-09 | |
| US62/385,642 | 2016-09-09 | ||
| PCT/US2017/050760 WO2018049217A1 (en) | 2016-09-09 | 2017-09-08 | Push-pull surgical instrument end effector actuation using flexible tension member |
| KR1020197007097A KR102456414B1 (ko) | 2016-09-09 | 2017-09-08 | 가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197007097A Division KR102456414B1 (ko) | 2016-09-09 | 2017-09-08 | 가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020247013256A Division KR102871113B1 (ko) | 2016-09-09 | 2017-09-08 | 가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20220143778A true KR20220143778A (ko) | 2022-10-25 |
| KR102660671B1 KR102660671B1 (ko) | 2024-04-26 |
Family
ID=61562125
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020247013256A Active KR102871113B1 (ko) | 2016-09-09 | 2017-09-08 | 가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 |
| KR1020197007097A Active KR102456414B1 (ko) | 2016-09-09 | 2017-09-08 | 가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 |
| KR1020227035598A Active KR102660671B1 (ko) | 2016-09-09 | 2017-09-08 | 가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020247013256A Active KR102871113B1 (ko) | 2016-09-09 | 2017-09-08 | 가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 |
| KR1020197007097A Active KR102456414B1 (ko) | 2016-09-09 | 2017-09-08 | 가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11020138B2 (ko) |
| EP (3) | EP3949892B1 (ko) |
| JP (3) | JP7044760B2 (ko) |
| KR (3) | KR102871113B1 (ko) |
| CN (2) | CN109688959B (ko) |
| WO (1) | WO2018049217A1 (ko) |
Families Citing this family (104)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10076348B2 (en) | 2013-08-15 | 2018-09-18 | Intuitive Surgical Operations, Inc. | Rotary input for lever actuation |
| EP3834752B1 (en) | 2013-12-11 | 2024-03-13 | Covidien LP | Wrist and jaw assemblies for robotic surgical systems |
| US10695142B2 (en) | 2015-02-19 | 2020-06-30 | Covidien Lp | Repositioning method of input device for robotic surgical system |
| AU2016229897B2 (en) | 2015-03-10 | 2020-07-16 | Covidien Lp | Measuring health of a connector member of a robotic surgical system |
| JP6719487B2 (ja) | 2015-06-23 | 2020-07-08 | コヴィディエン リミテッド パートナーシップ | ロボット外科手術アセンブリ |
| JP6755305B2 (ja) | 2015-09-25 | 2020-09-16 | コヴィディエン リミテッド パートナーシップ | ロボット外科組立体およびその器具駆動コネクタ |
| US10973517B2 (en) | 2015-11-13 | 2021-04-13 | Intuitive Surgical Operations, Inc. | Stapler with composite cardan and screw drive |
| EP3376988B1 (en) | 2015-11-19 | 2023-08-23 | Covidien LP | Optical force sensor for robotic surgical system |
| CN108697481B (zh) | 2016-03-04 | 2021-09-21 | 柯惠Lp公司 | 用于机器人外科手术系统的逆运动学控制系统 |
| US11576562B2 (en) | 2016-04-07 | 2023-02-14 | Titan Medical Inc. | Camera positioning method and apparatus for capturing images during a medical procedure |
| US11612446B2 (en) | 2016-06-03 | 2023-03-28 | Covidien Lp | Systems, methods, and computer-readable program products for controlling a robotically delivered manipulator |
| EP3463150B1 (en) | 2016-06-03 | 2023-09-27 | Covidien LP | Control arm for robotic surgical systems |
| US20190231451A1 (en) | 2016-07-14 | 2019-08-01 | Intuitive Surgical Operations, Inc. | Geared roll drive for medical instrument |
| WO2018013313A1 (en) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Multi-cable medical instrument |
| WO2018013298A1 (en) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Geared grip actuation for medical instruments |
| CN115349951A (zh) | 2016-11-21 | 2022-11-18 | 直观外科手术操作公司 | 线缆长度持恒的医疗器械 |
| AU2018221456A1 (en) | 2017-02-15 | 2019-07-11 | Covidien Lp | System and apparatus for crush prevention for medical robot applications |
| US10357321B2 (en) | 2017-02-24 | 2019-07-23 | Intuitive Surgical Operations, Inc. | Splayed cable guide for a medical instrument |
| EP3629979A4 (en) | 2017-05-24 | 2021-02-17 | Covidien LP | PRESENCE DETECTION FOR ELECTROSURGICAL TOOLS IN A ROBOTIZED SYSTEM |
| WO2018217431A1 (en) | 2017-05-25 | 2018-11-29 | Covidien Lp | Robotic surgical system with automated guidance |
| WO2019036418A1 (en) | 2017-08-16 | 2019-02-21 | Covidien Lp | END EFFECTOR COMPRISING A WRIST SET AND A MONOPOLAR TOOL FOR ROBOTIC SURGICAL SYSTEMS |
| US11628022B2 (en) | 2017-09-05 | 2023-04-18 | Covidien Lp | Collision handling algorithms for robotic surgical systems |
| CA3085476A1 (en) | 2018-01-04 | 2019-07-11 | Covidien Lp | Systems and assemblies for mounting a surgical accessory to robotic surgical systems, and providing access therethrough |
| JP2021510327A (ja) | 2018-01-10 | 2021-04-22 | コヴィディエン リミテッド パートナーシップ | コンピュータビジョンを利用したロボット外科システムのツールの位置および状態の判定 |
| US12102403B2 (en) | 2018-02-02 | 2024-10-01 | Coviden Lp | Robotic surgical systems with user engagement monitoring |
| US11497567B2 (en) | 2018-02-08 | 2022-11-15 | Intuitive Surgical Operations, Inc. | Jointed control platform |
| US11118661B2 (en) | 2018-02-12 | 2021-09-14 | Intuitive Surgical Operations, Inc. | Instrument transmission converting roll to linear actuation |
| CN111971150A (zh) | 2018-04-20 | 2020-11-20 | 柯惠Lp公司 | 手术机器人手推车放置的系统和方法 |
| CN112105312A (zh) | 2018-07-03 | 2020-12-18 | 柯惠Lp公司 | 用于在手术程序期间检测图像退化的系统、方法和计算机可读介质 |
| EP3849456A4 (en) | 2018-09-14 | 2022-06-15 | Covidien LP | SURGICAL ROBOTIC SYSTEMS AND METHODS FOR TRACKING THE USE OF SURGICAL INSTRUMENTS THEREOF |
| EP3852667A4 (en) | 2018-09-17 | 2022-06-15 | Covidien LP | SURGICAL ROBOTIC SYSTEMS |
| EP3852669A4 (en) | 2018-09-17 | 2022-06-22 | Covidien LP | SURGICAL ROBOTIC SYSTEMS |
| EP3880102A1 (en) | 2018-11-15 | 2021-09-22 | Intuitive Surgical Operations, Inc. | Surgical instrument with sensor aligned cable guide |
| CN113015498B (zh) | 2018-11-15 | 2025-03-18 | 直观外科手术操作公司 | 将工具轴与缆绳驱动负载解除联接 |
| US11815412B2 (en) | 2018-11-15 | 2023-11-14 | Intuitive Surgical Operations, Inc. | Strain sensor with contoured deflection surface |
| CN113194847A (zh) | 2018-12-21 | 2021-07-30 | 直观外科手术操作公司 | 用于外科手术器械的致动机构 |
| WO2020131290A1 (en) | 2018-12-21 | 2020-06-25 | Intuitive Surgical Operations, Inc. | Articulation assemblies for surgical instruments |
| WO2020131685A1 (en) | 2018-12-21 | 2020-06-25 | Intuitive Surgical Operations, Inc. | Surgical instruments with switches for deactivating and/or identifying stapler cartridges |
| JP7241178B2 (ja) | 2018-12-21 | 2023-03-16 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 補強されたステープルカートリッジを有する手術器具 |
| US11576733B2 (en) | 2019-02-06 | 2023-02-14 | Covidien Lp | Robotic surgical assemblies including electrosurgical instruments having articulatable wrist assemblies |
| WO2020214258A1 (en) | 2019-04-15 | 2020-10-22 | Intuitive Surgical Operations, Inc. | Staple cartridge for a surgical instrument |
| CN113840579A (zh) | 2019-05-22 | 2021-12-24 | 柯惠Lp公司 | 手术机器人臂储存组合件和使用储存组合件更换手术机器人臂的方法 |
| CN119745453A (zh) | 2019-05-31 | 2025-04-04 | 直观外科手术操作公司 | 用于外科器械的订合钉仓 |
| CN121041038A (zh) * | 2019-06-13 | 2025-12-02 | 直观外科手术操作公司 | 用于致动张力带的带有长度守恒机构的医疗工具 |
| US11666404B2 (en) * | 2019-08-28 | 2023-06-06 | Cilag Gmbh International | Articulating including antagonistic controls for articulation and calibration |
| WO2021046752A1 (en) | 2019-09-11 | 2021-03-18 | Covidien Lp | Systems and methods for neural-network based color restoration |
| US12223629B2 (en) | 2019-09-11 | 2025-02-11 | Covidien Lp | Systems and methods for smoke-reduction in images |
| CN114502083A (zh) | 2019-10-18 | 2022-05-13 | 直观外科手术操作公司 | 具有可调节钳爪的手术器械 |
| US12350828B2 (en) | 2019-12-16 | 2025-07-08 | Covidien Lp | Surgical robotic systems including surgical instruments with articulation |
| US12256890B2 (en) | 2019-12-23 | 2025-03-25 | Covidien Lp | Systems and methods for guiding surgical procedures |
| CN113017835B (zh) * | 2019-12-25 | 2022-11-11 | 杭州术创机器人有限公司 | 用于手术工具组件的线缆张紧装置 |
| WO2021158305A1 (en) | 2020-02-04 | 2021-08-12 | Covidien Lp | Systems and methods for machine readable identification of surgical tools in-situ |
| EP4099915B1 (en) | 2020-02-06 | 2025-09-03 | Covidien LP | System and methods for suturing guidance |
| EP4110221A1 (en) | 2020-02-26 | 2023-01-04 | Covidien LP | Robotic surgical instrument including linear encoders for measuring cable displacement |
| CN115697236A (zh) | 2020-05-04 | 2023-02-03 | 直观外科手术操作公司 | 用于驱动多根缆线的具有单输入装置的医疗器械 |
| US11771422B2 (en) | 2020-05-12 | 2023-10-03 | Covidien Lp | Active roller assembly for use in articulating stapler |
| CN115484858A (zh) | 2020-05-12 | 2022-12-16 | 柯惠Lp公司 | 用于在外科手术过程期间的图像映射和融合的系统和方法 |
| USD963851S1 (en) | 2020-07-10 | 2022-09-13 | Covidien Lp | Port apparatus |
| CN112754545B (zh) * | 2020-12-19 | 2025-07-25 | 深圳市精锋医疗科技股份有限公司 | 张紧机构、手术器械、从操作设备及手术机器人 |
| EP4274492B1 (en) | 2021-01-08 | 2026-01-28 | Intuitive Surgical Operations, Inc. | Surgical instrument with linear and purse string suture staples |
| WO2022150215A1 (en) | 2021-01-08 | 2022-07-14 | Intuitive Surgical Operations, Inc. | Surgical stapling instruments |
| CN115192093B (zh) * | 2021-04-09 | 2025-08-12 | 敏捷医疗科技(苏州)有限公司 | 一种手术器械及其拆装方法 |
| US12409003B2 (en) | 2021-05-14 | 2025-09-09 | Covidien Lp | Instrument cassette assemblies for robotic surgical instruments |
| US12369998B2 (en) | 2021-05-28 | 2025-07-29 | Covidien Lp | Real time monitoring of a robotic drive module |
| US11948226B2 (en) | 2021-05-28 | 2024-04-02 | Covidien Lp | Systems and methods for clinical workspace simulation |
| CN113208736B (zh) * | 2021-05-31 | 2023-02-10 | 上海微创医疗机器人(集团)股份有限公司 | 器械驱动装置、器械末端组件、手术器械及手术机器人 |
| US12257014B2 (en) * | 2021-06-22 | 2025-03-25 | Intuitive Surgical Operations, Inc. | Devices and methods for crimp interface for cable tension sensor |
| US12029508B2 (en) | 2021-08-16 | 2024-07-09 | Cilag Gmbh International | Adjustable power transmission mechanism for powered surgical stapler |
| US12213668B2 (en) | 2021-08-16 | 2025-02-04 | Cilag Gmbh International | Firing system features for surgical stapler |
| US11986182B2 (en) | 2021-08-16 | 2024-05-21 | Cilag Gmbh International | Multi-position restraining member for sled movement |
| US11957336B2 (en) | 2021-08-16 | 2024-04-16 | Cilag Gmbh International | Proximally located firing lockout mechanism for surgical stapler |
| US12089842B2 (en) * | 2021-08-16 | 2024-09-17 | Cilag Gmbh International | Firing bailout system for powered surgical stapler |
| US12171428B2 (en) | 2021-08-16 | 2024-12-24 | Cilag Gmbh International | Firing member tracking feature for surgical stapler |
| US12011164B2 (en) | 2021-08-16 | 2024-06-18 | Cilag Gmbh International | Cartridge-based firing lockout mechanism for surgical stapler |
| US11992210B2 (en) | 2021-08-16 | 2024-05-28 | Cilag Gmbh International | Multiple-sensor firing lockout mechanism for powered surgical stapler |
| US12102321B2 (en) | 2021-08-16 | 2024-10-01 | Cilag Gmbh International | Methods of operating a robotic surgical stapler |
| US11779332B2 (en) | 2021-08-16 | 2023-10-10 | Cilag Gmbh International | Powered surgical stapler having independently operable closure and firing systems |
| US11944297B2 (en) | 2021-08-16 | 2024-04-02 | Cilag Gmbh International | Variable response motor control algorithm for powered surgical stapler |
| US12458348B2 (en) | 2021-08-16 | 2025-11-04 | Cilag Gmbh International | Deflectable firing member for surgical stapler |
| US11992209B2 (en) | 2021-08-16 | 2024-05-28 | Cilag Gmbh International | Multi-threshold motor control algorithm for powered surgical stapler |
| US12599449B2 (en) | 2021-08-20 | 2026-04-14 | Covidien Lp | Surgical robotic system with orientation setup device and method |
| US12611272B2 (en) | 2021-09-09 | 2026-04-28 | Covidien Lp | Surgical robotic system with user engagement monitoring |
| US12564457B2 (en) | 2021-09-14 | 2026-03-03 | Covidien Lp | Robotic surgical instruments |
| US12496119B2 (en) | 2021-12-06 | 2025-12-16 | Covidien Lp | Jaw member, end effector assembly, and method of manufacturing a jaw member of an electrosurgical instrument |
| CN116269573B (zh) * | 2021-12-06 | 2025-09-16 | 深圳市精锋医疗科技股份有限公司 | 外科手术器械和手术机器人 |
| US12390294B2 (en) | 2021-12-14 | 2025-08-19 | Covidien Lp | Robotic surgical assemblies including surgical instruments having articulatable wrist assemblies |
| US12433699B2 (en) | 2022-02-10 | 2025-10-07 | Covidien Lp | Surgical robotic systems and robotic arm carts thereof |
| US12548667B2 (en) | 2022-02-15 | 2026-02-10 | Covidien Lp | System and method for checking compatibility of hardware and software components in a surgical robot |
| US12479098B2 (en) | 2022-08-03 | 2025-11-25 | Covidien Lp | Surgical robotic system with access port storage |
| US12465447B2 (en) | 2022-08-25 | 2025-11-11 | Covidien Lp | Surgical robotic system with instrument detection |
| US12496728B2 (en) | 2022-10-25 | 2025-12-16 | Covidien Lp | Surgical robotic system and method for restoring operational state |
| USD1066379S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066378S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066381S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066383S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066404S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066380S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066382S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066405S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| US12599445B2 (en) | 2023-01-26 | 2026-04-14 | Covidien Lp | Surgical robotic system and method for cart power switchover |
| WO2024215716A1 (en) | 2023-04-11 | 2024-10-17 | Intuitive Surgical Operations, Inc. | Surgical stapling instruments and control systems for such instruments |
| CN121038712A (zh) | 2023-05-01 | 2025-11-28 | 直观外科手术操作公司 | 外科缝合器械的部件及其制造方法 |
| USD1087995S1 (en) | 2023-08-02 | 2025-08-12 | Covidien Lp | Surgeon display screen with a transitional graphical user interface having staple firing icon |
| USD1087135S1 (en) | 2023-08-02 | 2025-08-05 | Covidien Lp | Surgeon display screen with a graphical user interface having spent staple icon |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002543865A (ja) * | 1999-05-10 | 2002-12-24 | ブロック ロジャース サージカル インコーポレイティド | 外科器具 |
| US20030135204A1 (en) * | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| JP2010227438A (ja) * | 2009-03-27 | 2010-10-14 | Terumo Corp | 医療用器具の製造方法及び医療用器具 |
| JP2010249818A (ja) | 2009-04-20 | 2010-11-04 | Javad Gnss Inc | レーザビーム画像コントラスト増強 |
| KR20130140060A (ko) * | 2011-02-18 | 2013-12-23 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 접합 및 절단 수술 기구와 관련 방법 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5762256A (en) * | 1995-08-28 | 1998-06-09 | United States Surgical Corporation | Surgical stapler |
| US5865361A (en) * | 1997-09-23 | 1999-02-02 | United States Surgical Corporation | Surgical stapling apparatus |
| JP3745234B2 (ja) * | 2000-06-13 | 2006-02-15 | オリンパス株式会社 | 内視鏡用処置具 |
| US20030229344A1 (en) * | 2002-01-22 | 2003-12-11 | Dycus Sean T. | Vessel sealer and divider and method of manufacturing same |
| US6994708B2 (en) | 2001-04-19 | 2006-02-07 | Intuitive Surgical | Robotic tool with monopolar electro-surgical scissors |
| US7121781B2 (en) | 2003-06-11 | 2006-10-17 | Intuitive Surgical | Surgical instrument with a universal wrist |
| US7126303B2 (en) | 2003-07-08 | 2006-10-24 | Board Of Regents Of The University Of Nebraska | Robot for surgical applications |
| US7951165B2 (en) * | 2003-08-18 | 2011-05-31 | Boston Scientific Scimed, Inc. | Endoscopic medical instrument and related methods of use |
| WO2008045333A2 (en) * | 2006-10-05 | 2008-04-17 | Tyco Healthcare Group Lp | Flexible endoscopic stitching devices |
| US8870867B2 (en) * | 2008-02-06 | 2014-10-28 | Aesculap Ag | Articulable electrosurgical instrument with a stabilizable articulation actuator |
| US8011551B2 (en) * | 2008-07-01 | 2011-09-06 | Tyco Healthcare Group Lp | Retraction mechanism with clutch-less drive for use with a surgical apparatus |
| KR101868123B1 (ko) * | 2009-11-13 | 2018-06-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 곡선형 캐뉼라 수술 시스템 |
| EP2594222B1 (en) * | 2009-11-13 | 2018-10-03 | Intuitive Surgical Operations, Inc. | Surgical tool with a compact wrist |
| KR102077004B1 (ko) * | 2009-11-13 | 2020-02-13 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 여분의 닫힘 메커니즘을 구비한 단부 작동기 |
| US9877720B2 (en) * | 2010-09-24 | 2018-01-30 | Ethicon Llc | Control features for articulating surgical device |
| WO2012049623A1 (en) * | 2010-10-11 | 2012-04-19 | Ecole Polytechnique Federale De Lausanne (Epfl) | Mechanical manipulator for surgical instruments |
| JP5734631B2 (ja) | 2010-12-02 | 2015-06-17 | オリンパス株式会社 | 手術支援システム |
| CN106109017B (zh) * | 2011-05-31 | 2019-01-04 | 直观外科手术操作公司 | 机器人手术器械中的夹持力控制 |
| JP5856817B2 (ja) | 2011-11-16 | 2016-02-10 | オリンパス株式会社 | 医療用処置具およびこれを備えるマニピュレータ |
| US9125681B2 (en) * | 2012-09-26 | 2015-09-08 | Ethicon Endo-Surgery, Inc. | Detachable end effector and loader |
| EP2976188B1 (en) * | 2013-02-27 | 2019-04-24 | Olympus Corporation | Manipulator |
| US9839481B2 (en) * | 2013-03-07 | 2017-12-12 | Intuitive Surgical Operations, Inc. | Hybrid manual and robotic interventional instruments and methods of use |
| KR20160008169A (ko) * | 2013-03-14 | 2016-01-21 | 에스알아이 인터내셔널 | 컴팩트 로봇 리스트 |
| JP6153484B2 (ja) | 2014-02-24 | 2017-06-28 | オリンパス株式会社 | ワイヤ駆動装置およびマニピュレータ |
| DE112014006994T5 (de) | 2014-10-30 | 2017-06-14 | Olympus Corporation | Medizinisches Behandlungsinstrument |
| EP3232951B1 (en) * | 2014-12-19 | 2023-10-25 | DistalMotion SA | Surgical instrument with articulated end-effector |
| JP7311473B2 (ja) * | 2020-09-02 | 2023-07-19 | 株式会社神戸製鋼所 | アーク溶接方法 |
-
2017
- 2017-09-08 US US16/331,734 patent/US11020138B2/en active Active
- 2017-09-08 EP EP21183988.1A patent/EP3949892B1/en active Active
- 2017-09-08 CN CN201780054562.6A patent/CN109688959B/zh active Active
- 2017-09-08 JP JP2019510811A patent/JP7044760B2/ja active Active
- 2017-09-08 CN CN202111060942.5A patent/CN113598844B/zh active Active
- 2017-09-08 KR KR1020247013256A patent/KR102871113B1/ko active Active
- 2017-09-08 KR KR1020197007097A patent/KR102456414B1/ko active Active
- 2017-09-08 KR KR1020227035598A patent/KR102660671B1/ko active Active
- 2017-09-08 EP EP17849648.5A patent/EP3509523B1/en active Active
- 2017-09-08 EP EP23162476.8A patent/EP4218653A1/en active Pending
- 2017-09-08 WO PCT/US2017/050760 patent/WO2018049217A1/en not_active Ceased
-
2021
- 2021-05-05 US US17/308,368 patent/US20210267617A1/en active Pending
-
2022
- 2022-03-17 JP JP2022042360A patent/JP7335382B2/ja active Active
-
2023
- 2023-08-17 JP JP2023133177A patent/JP2023144088A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002543865A (ja) * | 1999-05-10 | 2002-12-24 | ブロック ロジャース サージカル インコーポレイティド | 外科器具 |
| US20030135204A1 (en) * | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| JP2010227438A (ja) * | 2009-03-27 | 2010-10-14 | Terumo Corp | 医療用器具の製造方法及び医療用器具 |
| JP2010249818A (ja) | 2009-04-20 | 2010-11-04 | Javad Gnss Inc | レーザビーム画像コントラスト増強 |
| KR20130140060A (ko) * | 2011-02-18 | 2013-12-23 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 접합 및 절단 수술 기구와 관련 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102660671B1 (ko) | 2024-04-26 |
| JP2019526333A (ja) | 2019-09-19 |
| KR102456414B1 (ko) | 2022-10-19 |
| JP2022069664A (ja) | 2022-05-11 |
| CN109688959A (zh) | 2019-04-26 |
| KR102871113B1 (ko) | 2025-10-16 |
| CN113598844A (zh) | 2021-11-05 |
| WO2018049217A1 (en) | 2018-03-15 |
| EP3949892A1 (en) | 2022-02-09 |
| CN109688959B (zh) | 2021-10-01 |
| KR20190040496A (ko) | 2019-04-18 |
| JP7335382B2 (ja) | 2023-08-29 |
| US20190201150A1 (en) | 2019-07-04 |
| JP7044760B2 (ja) | 2022-03-30 |
| KR20240058956A (ko) | 2024-05-03 |
| EP3509523A1 (en) | 2019-07-17 |
| JP2023144088A (ja) | 2023-10-06 |
| EP3509523B1 (en) | 2021-07-21 |
| EP4218653A1 (en) | 2023-08-02 |
| EP3509523A4 (en) | 2020-05-13 |
| US20210267617A1 (en) | 2021-09-02 |
| EP3949892B1 (en) | 2023-04-19 |
| US11020138B2 (en) | 2021-06-01 |
| CN113598844B (zh) | 2025-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102456414B1 (ko) | 가요성 인장 부재를 이용한 푸시-풀 수술 기기 엔드 이펙터 작동 | |
| US12402964B2 (en) | Robotic surgical stapler assembly configured to use stapler reload | |
| JP6778246B2 (ja) | しまい込めるナイフブレードを持つ手術器具 | |
| US11992287B2 (en) | Articulable medical devices having flexible wire routing | |
| CN103561667B (zh) | 机器人手术器械中的夹持力控制 | |
| KR102009224B1 (ko) | 여분의 닫힘 메커니즘을 구비한 단부 작동기 | |
| CN113194847A (zh) | 用于外科手术器械的致动机构 | |
| JP2022515163A (ja) | 補強されたステープルカートリッジを有する手術器具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| PA0104 | Divisional application for international application |
Comment text: Divisional Application for International Patent Patent event code: PA01041R01D Patent event date: 20221013 Application number text: 1020197007097 Filing date: 20190311 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20221031 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20230329 Patent event code: PE09021S01D |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Final Notice of Reason for Refusal Patent event date: 20230810 Patent event code: PE09021S02D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20240124 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20240422 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20240423 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |