KR20220162042A - 경로 결정 방법, 경로 결정 시스템, 및 경로 결정 프로그램 - Google Patents
경로 결정 방법, 경로 결정 시스템, 및 경로 결정 프로그램 Download PDFInfo
- Publication number
- KR20220162042A KR20220162042A KR1020220052058A KR20220052058A KR20220162042A KR 20220162042 A KR20220162042 A KR 20220162042A KR 1020220052058 A KR1020220052058 A KR 1020220052058A KR 20220052058 A KR20220052058 A KR 20220052058A KR 20220162042 A KR20220162042 A KR 20220162042A
- Authority
- KR
- South Korea
- Prior art keywords
- work
- path
- candidate
- route
- work vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0219—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory ensuring the processing of the whole working surface
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/0278—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using satellite positioning signals, e.g. GPS
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0234—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons
- G05D1/0236—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/617—Safety or protection, e.g. defining protection zones around obstacles or avoiding hazards
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/007—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow
- A01B69/008—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow automatic
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0016—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement characterised by the operator's input device
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0223—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving speed control of the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
- G05D1/024—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0253—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means extracting relative motion information from a plurality of images taken successively, e.g. visual odometry, optical flow
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0255—Control of position or course in two dimensions specially adapted to land vehicles using acoustic signals, e.g. ultra-sonic singals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0257—Control of position or course in two dimensions specially adapted to land vehicles using a radar
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/028—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using a RF signal
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/0285—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using signals transmitted via a public communication network, e.g. GSM network
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/226—Communication links with the remote-control arrangements
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/242—Means based on the reflection of waves generated by the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/243—Means capturing signals occurring naturally from the environment, e.g. ambient optical, acoustic, gravitational or magnetic signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/246—Arrangements for determining position or orientation using environment maps, e.g. simultaneous localisation and mapping [SLAM]
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/644—Optimisation of travel parameters, e.g. of energy consumption, journey time or distance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/648—Performing a task within a working area or space, e.g. cleaning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/65—Following a desired speed profile
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01M—CATCHING, TRAPPING OR SCARING OF ANIMALS; APPARATUS FOR THE DESTRUCTION OF NOXIOUS ANIMALS OR NOXIOUS PLANTS
- A01M7/00—Special adaptations or arrangements of liquid-spraying apparatus for purposes covered by this subclass
- A01M7/0089—Regulating or controlling systems
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2101/00—Details of software or hardware architectures used for the control of position
- G05D2101/10—Details of software or hardware architectures used for the control of position using artificial intelligence [AI] techniques
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/15—Specific applications of the controlled vehicles for harvesting, sowing or mowing in agriculture or forestry
-
- G05D2201/0201—
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Electromagnetism (AREA)
- Environmental Sciences (AREA)
- Optics & Photonics (AREA)
- Soil Sciences (AREA)
- Mechanical Engineering (AREA)
- Acoustics & Sound (AREA)
- Pest Control & Pesticides (AREA)
- Zoology (AREA)
- Wood Science & Technology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Insects & Arthropods (AREA)
- Computing Systems (AREA)
- Mathematical Physics (AREA)
- Theoretical Computer Science (AREA)
- Guiding Agricultural Machines (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
(과제) 작업 차량이 작업지의 표토를 상하게 하는 일 없이 자동 주행하면서 작업을 행하는 것이 가능한 목표 경로를 결정하는 경로 결정 방법, 경로 결정 시스템, 및 경로 결정 프로그램을 제공하는 것.
(해결 수단) 경로 결정 방법은 포장(F)에 있어서 복수 열로 배치된 작물 열(Vr)에 대해서 산포 작업을 행하면서 소정 열 순서로 자동 주행하는 작업 차량(10)을 주행시키는 목표 경로(R)의 후보인 복수의 후보 경로(r1~r3)를 생성하는 것과, 복수의 후보 경로(r1~r3) 중으로부터 선택되는 제 1 후보 경로를 목표 경로(R)로서 결정하는 것을 실행한다.
(해결 수단) 경로 결정 방법은 포장(F)에 있어서 복수 열로 배치된 작물 열(Vr)에 대해서 산포 작업을 행하면서 소정 열 순서로 자동 주행하는 작업 차량(10)을 주행시키는 목표 경로(R)의 후보인 복수의 후보 경로(r1~r3)를 생성하는 것과, 복수의 후보 경로(r1~r3) 중으로부터 선택되는 제 1 후보 경로를 목표 경로(R)로서 결정하는 것을 실행한다.
Description
본 발명은 복수 열로 배치된 작업 대상물에 대해서 소정 작업을 행하면서 자동 주행하는 작업 차량의 목표 경로를 결정하는 경로 결정 방법, 경로 결정 시스템, 및 경로 결정 프로그램에 관한 것이다.
포장, 농원 등의 작업지에 심어진 작물에 대해서 약액을 산포하면서 목표 경로를 자동 주행하는 작업 차량이 알려져 있다(예를 들면, 특허문헌 1 참조). 상기 목표 경로는, 예를 들면 작물이 배열되는 복수의 열(작물 열)에 있어서 열마다 상기 열의 양 끝점을 연결함으로써 생성된다.
작업 차량은 생성된 상기 목표 경로를 자동 주행하기 때문에 작업을 행할 때마다 매회 동일한 장소를 주행한다. 이 때문에 작업지에 있어서 작업 차량이 주행한 부분의 표토를 상하게 해버리는 문제가 발생한다.
본 발명의 목적은 작업 차량이 작업지의 표토를 상하게 하는 일 없이 자동 주행하면서 작업을 행하는 것이 가능한 목표 경로를 결정하는 경로 결정 방법, 경로 결정 시스템, 및 경로 결정 프로그램에 관한 것이다.
본 발명에 의한 경로 결정 방법은 작업지에 있어서 복수 열로 배치된 작업 대상물에 대해서 소정 작업을 행하면서 소정 열 순서로 자동 주행하는 작업 차량을 주행시키는 목표 경로의 후보인 복수의 후보 경로를 생성하는 것과, 상기 복수의 후보 경로 중으로부터 선택되는 제 1 후보 경로를 상기 목표 경로로서 결정하는 것을 실행하는 방법이다.
본 발명에 의한 경로 결정 시스템은 생성 처리부와 결정 처리부를 구비한다. 상기 생성 처리부는 작업지에 있어서 복수 열로 배치된 작업 대상물에 대해서 소정 작업을 행하면서 소정 열 순서로 자동 주행하는 작업 차량을 주행시키는 목표 경로의 후보인 복수의 후보 경로를 생성한다. 상기 결정 처리부는 상기 복수의 후보 경로 중으로부터 선택되는 제 1 후보 경로를 상기 목표 경로로서 결정한다.
본 발명에 의한 경로 결정 프로그램은 작업지에 있어서 복수 열로 배치된 작업 대상물에 대해서 소정 작업을 행하면서 소정 열 순서로 자동 주행하는 작업 차량을 주행시키는 목표 경로의 후보인 복수의 후보 경로를 생성하는 것과, 상기 복수의 후보 경로 중으로부터 선택되는 제 1 후보 경로를 상기 목표 경로로서 결정하는 것을 1 또는 복수의 프로세서로 실행시키기 위한 프로그램이다.
(발명의 효과)
본 발명에 의하면 작업 차량이 작업지의 표토를 상하게 하는 일 없이 자동 주행하면서 작업을 행하는 것이 가능한 목표 경로를 결정하는 경로 결정 방법, 경로 결정 시스템, 및 경로 결정 프로그램을 제공할 수 있다.
도 1은 본 발명의 실시형태에 의한 자동 주행 시스템의 전체 구성을 나타내는 모식도이다.
도 2는 본 발명의 실시형태에 의한 자동 주행 시스템의 구성을 나타내는 블록도이다.
도 3은 본 발명의 실시형태에 의한 작업 차량을 좌전방측으로부터 본 외관도이다.
도 4A는 본 발명의 실시형태에 의한 작업 차량을 좌측으로부터 본 좌측면의 외관도이다.
도 4B는 본 발명의 실시형태에 의한 작업 차량을 우측으로부터 본 우측면의 외관도이다.
도 4C는 본 발명의 실시형태에 의한 작업 차량을 배면측으로부터 본 배면의 외관도이다.
도 5는 본 발명의 실시형태에 의한 작물 열의 일례를 나타내는 도면이다.
도 6은 본 발명의 실시형태에 의한 목표 경로의 일례를 나타내는 도면이다.
도 7A는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 7B는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 7C는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 7D는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 7E는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 7F는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 8은 본 발명의 실시형태에 의한 후보 경로의 일례를 나타내는 도면이다.
도 9는 본 발명의 실시형태에 의한 경로 정보의 일례를 나타내는 도면이다.
도 10은 본 발명의 실시형태에 의한 자동 주행 시스템에 의해 실행되는 자동 주행 처리의 수순의 일례를 나타내는 플로우 차트이다.
도 2는 본 발명의 실시형태에 의한 자동 주행 시스템의 구성을 나타내는 블록도이다.
도 3은 본 발명의 실시형태에 의한 작업 차량을 좌전방측으로부터 본 외관도이다.
도 4A는 본 발명의 실시형태에 의한 작업 차량을 좌측으로부터 본 좌측면의 외관도이다.
도 4B는 본 발명의 실시형태에 의한 작업 차량을 우측으로부터 본 우측면의 외관도이다.
도 4C는 본 발명의 실시형태에 의한 작업 차량을 배면측으로부터 본 배면의 외관도이다.
도 5는 본 발명의 실시형태에 의한 작물 열의 일례를 나타내는 도면이다.
도 6은 본 발명의 실시형태에 의한 목표 경로의 일례를 나타내는 도면이다.
도 7A는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 7B는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 7C는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 7D는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 7E는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 7F는 본 발명의 실시형태에 의한 기준 후보 경로의 생성 방법을 설명하기 위한 도면이다.
도 8은 본 발명의 실시형태에 의한 후보 경로의 일례를 나타내는 도면이다.
도 9는 본 발명의 실시형태에 의한 경로 정보의 일례를 나타내는 도면이다.
도 10은 본 발명의 실시형태에 의한 자동 주행 시스템에 의해 실행되는 자동 주행 처리의 수순의 일례를 나타내는 플로우 차트이다.
이하의 실시형태는 본 발명을 구체화한 일례이며, 본 발명의 기술적 범위를 한정하는 것은 아니다.
[자동 주행 시스템(1)]
도 1 및 도 2에 나타내는 바와 같이 본 발명의 실시형태에 의한 자동 주행 시스템(1)은 작업 차량(10)과, 조작 단말(20)과, 서버(30)와, 기지국(40)과, 위성(50)을 포함하고 있다. 작업 차량(10), 조작 단말(20), 및 서버(30)는 통신망(N1)을 통해 통신 가능하다. 예를 들면, 작업 차량(10) 및 조작 단말(20)은 휴대 전화 회선망, 패킷 회선망, 또는 무선 LAN을 통해 통신 가능하다. 또한, 작업 차량(10) 및 조작 단말(20) 각각과 서버(30)는 휴대 전화 회선망, 패킷 회선망, 또는 무선 LAN을 통해 통신 가능하다.
본 실시형태에서는 작업 차량(10)이 포장(F)에 심어진 작물(V)(도 5 참조)에 약액, 물 등을 산포하는 산포 작업을 행하는 차량일 경우를 예로 들어 설명한다. 포장(F)은 본 발명의 작업지의 일례이며, 포장(F)은, 예를 들면 포도원, 사과원 등의 과수원이다. 작물(V)은 본 발명의 작업 대상물의 일례이며, 작물(V)은, 예를 들면 포도의 과수이다. 상기 산포 작업은 본 발명의 소정 작업의 일례이며, 상기 산포 작업은, 예를 들면 작물(V)에 약액, 물 등의 산포물을 산포하는 작업이다. 다른 실시형태로서 작업 차량(10)은 제초 작업을 행하는 차량, 잎 베기 작업를 행하는 차량, 수확 작업을 행하는 차량이어도 좋다. 상기 제초 작업 및 상기 수확 작업은 본 발명의 소정 작업의 일례이다.
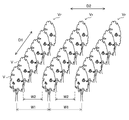
작물(V)은 포장(F)에 있어서 소정 간격으로 복수 열로 배치되어 있다. 구체적으로는 도 5에 나타내는 바와 같이 복수의 작물(V)은 소정 방향(D1 방향)으로 직선형상으로 심어져 있으며, 직선형상으로 배열되는 복수의 작물(V)을 포함하는 작물 열(Vr)을 구성한다. 도 5에는 3개의 작물 열(Vr)을 예시하고 있다. 각 작물 열(Vr)은 열 방향(D2 방향)으로 소정 간격(w1)으로 배치되어 있다. 이웃하는 작물 열(Vr)의 간격(w2)의 영역(공간)은 작업 차량(10)이 D1 방향으로 주행하면서 작물(V)에 대해서 산포 작업을 행하는 작업 통로가 된다.
또한, 작업 차량(10)은 미리 설정된 목표 경로(R)를 따라 자동 주행(자율 주행)하는 것이 가능하다. 예를 들면, 도 6에 나타내는 바와 같이 작업 차량(10)은 작업 개시 위치(S)로부터 작업 종료 위치(G)까지 작업 경로(R1)(작업 경로(R1a~R1f)) 및 이동 경로(R2)를 포함하는 목표 경로(R)를 따라 자동 주행한다. 작업 경로(R1)는 작업 차량(10)이 작물(V)에 대해서 산포 작업을 행하는 직선형상의 경로이며, 이동 경로(R2)는 작업 차량(10)이 산포 작업을 행하지 않고 작물 열(Vr) 사이를 이동하는 경로이다. 이동 경로(R2)에는, 예를 들면 선회 경로 및 직진 경로가 포함된다. 도 6에 나타내는 예에서는 포장(F)에 있어서 작물 열(Vr1~Vr11)로 이루어지는 작물(V)이 배치되어 있다. 도 6에서는 작물(V)이 심어져 있는 위치(작물 위치)를 「Vp」로 나타내고 있다. 또한, 도 6의 포장(F)을 주행하는 작업 차량(10)은 차체(100)가 도어형의 형상을 갖고 있으며(도 4C 참조), 1개의 작물 열(Vr)을 걸터타고 주행하면서 상기 작물 열(Vr)의 작물(V) 및 상기 작물 열(Vr)에 인접하는 작물 열(Vr)에 대해서 약액을 산포한다. 예를 들면, 도 6에 나타내는 바와 같이 작업 차량(10)이 작물 열(Vr5)을 걸터타고 주행할 경우 작업 차량(10)의 좌측 차체(좌측부(100L))가 작물 열(Vr4, Vr5) 사이의 작업 통로를 주행하고, 작업 차량(10)의 우측 차체(우측부(100R))가 작물 열(Vr5, Vr6) 사이의 작업 통로를 주행하고, 또한 작물 열(Vr4, Vr5, Vr6)의 작물(V)에 대해서 약액을 산포한다.
또한, 작업 차량(10)은 소정 열 순서로 자동 주행을 행한다. 예를 들면, 작업 차량(10)은 작물 열(Vr1)을 걸터타고 주행하고, 이어서 작물 열(Vr3)을 걸터타고 주행하고, 이어서 작물 열(Vr5)을 걸터타고 주행한다. 이와 같이 작업 차량(10)은 미리 설정된 작물 열(Vr)의 순번에 따라 자동 주행을 행한다. 또한, 작업 차량(10)은 작물 열(Vr)의 배열순으로 1열마다 주행해도 좋고, 복수 열 간격으로 주행해도 좋다.
위성(50)은 GNSS(Global Navigation Satellite System) 등의 위성 측위 시스템을 구성하는 측위 위성이며, GNSS 신호(위성 신호)를 송신한다. 기지국(40)은 위성 측위 시스템을 구성하는 기준점(기준국)이다. 기지국(40)은 작업 차량(10)의 현재 위치를 산출하기 위한 보정 정보를 작업 차량(10)에 송신한다.
작업 차량(10)에 탑재되는 측위 장치(16)는 위성(50)으로부터 송신되는 GNSS 신호를 이용해서 작업 차량(10)의 현재 위치(위도, 경도, 고도) 및 현재 방위 등을 산출하는 측위 처리를 실행한다. 구체적으로는 측위 장치(16)는 2대의 수신기(안테나(164) 및 기지국(40))가 수신하는 측위 정보(GNSS 신호 등)와 기지국(40)에서 생성되는 보정 정보에 의거하여 작업 차량(10)을 측위하는 RTK(Real Time Kinematic) 방식 등을 이용해서 작업 차량(10)을 측위한다. 상기 측위 방식은 주지의 기술이기 때문에 상세한 설명은 생략한다.
이하, 자동 주행 시스템(1)을 구성하는 각 구성 요소의 상세에 대해서 설명한다.
[작업 차량(10)]
도 3은 작업 차량(10)을 좌전방측으로부터 본 외관도이다. 도 4A는 작업 차량(10)을 좌측으로부터 본 좌측면의 외관도이며, 도 4B는 작업 차량(10)을 우측으로부터 본 우측면의 외관도이며, 도 4C는 작업 차량(10)을 배면측으로부터 본 배면의 외관도이다.
도 1~도 4에 나타내는 바와 같이 작업 차량(10)은 차량 제어 장치(11), 기억부(12), 주행 장치(13), 산포 장치(14), 통신부(15), 측위 장치(16), 카메라 장치(17), 장해물 검출 장치(18) 등을 구비한다. 차량 제어 장치(11)는 기억부(12), 주행 장치(13), 산포 장치(14), 측위 장치(16), 카메라 장치(17), 장해물 검출 장치(18) 등에 전기적으로 접속되어 있다. 또한, 차량 제어 장치(11) 및 측위 장치(16)는 무선 통신 가능이어도 좋다.
통신부(15)는 작업 차량(10)을 유선 또는 무선으로 통신망(N1)에 접속하고, 통신망(N1)을 통해 조작 단말(20), 서버(30) 등의 외부 기기와의 사이에서 소정 통신 프로토콜에 따라 데이터 통신을 실행하기 위한 통신 인터페이스이다.
기억부(12)는 각종 정보를 기억하는 HDD(Hard Disk Drive) 또는 SSD(Solid State Drive) 등의 불휘발성의 기억부이다. 기억부(12)에는 차량 제어 장치(11)에 후술하는 자동 주행 처리(도 10 참조)를 실행시키기 위한 자동 주행 프로그램 등의 제어 프로그램이 기억되어 있다. 예를 들면, 상기 자동 주행 프로그램은 CD 또는 DVD 등의 컴퓨터 판독 가능한 기록 매체에 비일시적으로 기록되어 있으며, 소정 판독 장치(도시하지 않음)에서 판독되어 기억부(12)에 기억된다. 또한, 상기 자동 주행 프로그램은 서버(예를 들면, 서버(30))로부터 통신망(N1)을 통해 작업 차량(10)에 다운로드되어 기억부(12)에 기억되어도 좋다. 또한, 기억부(12)에는 조작 단말(20)에 있어서 생성되는 목표 경로(R)의 데이터가 기억된다. 예를 들면, 목표 경로(R)의 데이터는 조작 단말(20)로부터 서버(30)에 송신되고, 서버(30)로부터 작업 차량(10)에 전송되어 기억부(12)에 기억된다.
차량 제어 장치(11)는 CPU, ROM, 및 RAM 등의 제어 기기를 갖는다. 상기 CPU는 각종 연산 처리를 실행하는 프로세서이다. 상기 ROM은 상기 CPU에 각종 연산 처리를 실행시키기 위한 BIOS 및 OS 등의 제어 프로그램이 미리 기억되는 불휘발성의 기억부이다. 상기 RAM은 각종 정보를 기억하는 휘발성 또는 불휘발성의 기억부이며, 상기 CPU가 실행하는 각종 처리의 일시 기억 메모리(작업 영역)로서 사용된다. 그리고 차량 제어 장치(11)는 상기 ROM 또는 기억부(12)에 미리 기억된 각종 제어 프로그램을 상기 CPU에서 실행함으로써 작업 차량(10)을 제어한다.
차량 제어 장치(11)는 작업 차량(10)의 주행을 제어한다. 구체적으로는 차량 제어 장치(11)는 측위 장치(16)에 의해 측위되는 작업 차량(10)의 위치를 나타내는 위치 정보에 의거하여 목표 경로(R)를 따라 작업 차량(10)을 자동 주행시킨다. 예를 들면, 상기 측위 상태가 RTK 측위 가능한 상태로 되어 조작 단말(20)의 조작 화면에 있어서 오퍼레이터가 스타트 버튼을 압하하면 조작 단말(20)은 작업 개시 지시를 작업 차량(10)에 출력한다. 차량 제어 장치(11)는 조작 단말(20)로부터 상기 작업 개시 지시를 취득하면 측위 장치(16)에 의해 측위되는 작업 차량(10)의 위치를 나타내는 위치 정보에 의거하여 작업 차량(10)의 자동 주행을 개시시킨다. 이것에 의해 작업 차량(10)은 목표 경로(R)를 따라 자동 주행을 개시하고, 상기 작업 통로에 있어서 산포 장치(14)에 의한 산포 작업을 개시한다.
또한, 차량 제어 장치(11)는 조작 단말(20)로부터 주행 정지 지시를 취득하면 작업 차량(10)의 자동 주행을 정지시킨다. 예를 들면, 조작 단말(20)의 조작 화면에 있어서 오퍼레이터가 스톱 버튼을 압하하면 조작 단말(20)은 상기 주행 정지 지시를 작업 차량(10)에 출력한다. 차량 제어 장치(11)는 조작 단말(20)로부터 상기 주행 정지 지시를 취득하면 작업 차량(10)의 자동 주행을 정지시킨다. 이것에 의해 작업 차량(10)은 자동 주행을 정지하고, 산포 장치(14)에 의한 산포 작업을 정지한다.
작업 차량(10)은 포장(F)에 있어서 복수 열로 나란히 심어진 작물(V)(과수)을 걸터타고 주행하는 도어형의 차체(100)를 구비한다. 도 4C에 나타내는 바와 같이 차체(100)는 좌측부(100L)와, 우측부(100R)와, 좌측부(100L) 및 우측부(100R)를 접속하는 접속부(100C)에 의해 도어형으로 형성되어 있으며, 좌측부(100L), 우측부(100R), 및 접속부(100C)의 내측에 작물(V)의 통과를 허용하는 공간(100S)이 확보된다.
차체(100)의 좌측부(100L) 및 우측부(100R) 각각의 하단부에는 크롤러(101)가 설치되어 있다. 좌측부(100L)에는 엔진(도시하지 않음), 배터리(도시하지 않음) 등이 설치되어 있다. 우측부(100R)에는 산포 장치(14)의 저류 탱크(14A)(도 4B 참조) 등이 설치되어 있다. 이와 같이 차체(100)의 좌측부(100L) 및 우측부(100R)에 구성 부품을 나누어 배치함으로써 작업 차량(10)은 좌우의 밸런스의 균형화 및 저중심화가 도모되어 있다. 그 결과, 작업 차량(10)은 포장(F)의 사면 등을 안정적으로 주행할 수 있다.
주행 장치(13)는 작업 차량(10)을 주행시키는 구동부이다. 주행 장치(13)는 엔진, 크롤러(101) 등을 구비한다.
좌우의 크롤러(101)는 정유압식 무단 변속 장치에 의한 독립 변속이 가능한 상태로 엔진으로부터의 동력에 의해 구동된다. 이것에 의해 차체(100)는 좌우의 크롤러(101)가 전진 방향으로 등속 구동됨으로써 전진 방향으로 직진하는 전진 상태가 되고, 좌우의 크롤러(101)가 후진 방향으로 등속 구동됨으로써 후진 방향으로 직진하는 후진 상태가 된다. 또한, 차체(100)는 좌우의 크롤러(101)가 전진 방향으로 부등속 구동됨으로써 전진하면서 선회하는 전진 선회 상태가 되고, 좌우의 크롤러(101)가 후진 방향으로 부등속 구동됨으로써 후진하면서 선회하는 후진 선회 상태가 된다. 또한, 차체(100)는 좌우 어느 한쪽의 크롤러(101)가 구동 정지된 상태로 다른 쪽의 크롤러(101)가 구동됨으로써 피벗 선회(신지(信地) 선회) 상태가 되고, 좌우의 크롤러(101)가 전진 방향과 후진 방향으로 등속 구동됨으로써 스핀 선회(초신지 선회) 상태가 된다. 또한, 차체(100)는 좌우의 크롤러(101)가 구동 정지됨으로써 주행 정지 상태가 된다. 또한, 좌우의 크롤러(101)는 전동 모터에 의해 구동되는 전동식으로 구성되어 있어도 좋다.
도 4C에 나타내는 바와 같이 산포 장치(14)는 약액 등을 저류하는 저류 탱크(14A), 약액 등을 압송하는 산포용 펌프(도시하지 않음), 산포용 펌프를 구동하는 전동식의 산포 모터(도시하지 않음), 차체(100)의 배부(背部)에 있어서 종 방향 자세로 좌우에 2개씩 병렬로 구비된 산포관(14B), 각 산포관(14B)에 3개씩 구비된 합계 12개의 산포 노즐(14C), 약액 등의 산포량 및 산포 패턴을 변경하는 전자 제어식의 밸브 유닛(도시하지 않음), 및 이들을 접속하는 복수의 산포용 배관(도시하지 않음) 등을 구비하고 있다.
각 산포 노즐(14C)은 대응하는 산포관(14B)에 상하 방향으로 위치 변경 가능하게 부착되어 있다. 이것에 의해 각 산포 노즐(14C)은 이웃하는 산포 노즐(14C)과의 간격 및 산포관(14B)에 대한 높이 위치를 산포 대상물(작물(V))에 따라 변경할 수 있다. 또한, 각 산포 노즐(14C)은 차체(100)에 대한 높이 위치 및 좌우 위치를 산포 대상물에 따라 변경 가능하게 부착되어 있다.
또한, 산포 장치(14)에 있어서 각 산포관(14B)에 설치되는 산포 노즐(14C)의 수량은 작물(V)의 종류, 각 산포관(14B)의 길이 등에 따라 여러 가지의 변경이 가능하다.
도 4C에 나타내는 바와 같이 복수의 산포 노즐(14C) 중 최좌단의 산포관(14B)에 설치된 3개의 산포 노즐(14C)은 차체(100)의 좌측 외방에 위치하는 작물(Va)을 향해 약액을 좌측 방향으로 산포한다. 복수의 산포 노즐(14C) 중 최좌단의 산포관(14B)에 인접하는 좌내측의 산포관(14B)에 설치된 3개의 산포 노즐(14C)은 차체(100)에 있어서의 좌우 중앙의 공간(100S)에 위치하는 작물(Vb)을 향해 약액을 우측 방향으로 산포한다. 복수의 산포 노즐(14C) 중 최우단의 산포관(14B)에 설치된 3개의 산포 노즐(14C)은 차체(100)의 우측 외방에 위치하는 작물(Vc)을 향해 약액을 우측 방향으로 산포한다. 복수의 산포 노즐(14C) 중 최우단의 산포관(14B)에 인접하는 우내측의 산포관(14B)에 설치된 3개의 산포 노즐(14C)은 공간(100S)에 위치하는 작물(Vb)을 향해 약액을 좌측 방향으로 산포한다.
상기 구성에 의해 산포 장치(14)에 있어서는 차체(100)의 좌측부(100L)에 설치된 2개의 산포관(14B)과 6개의 산포 노즐(14C)이 좌측의 산포부(14L)로서 기능한다. 또한, 차체(100)의 우측부(100R)에 설치된 2개의 산포관(14B)과 6개의 산포 노즐(14C)이 우측의 산포부(14R)로서 기능한다. 그리고 좌우의 산포부(14L, 14R)는 차체(100)의 배부에 있어서 좌우 방향으로의 산포가 가능한 상태로 좌우의 산포부(14L, 14R) 사이에 작물(Vb)의 통과(공간(100S))를 허용하는 좌우 간격을 두고 배치되어 있다.
산포 장치(14)에 있어서 산포부(14L, 14R)에 의한 산포 패턴에는 산포부(14L, 14R) 각각이 좌우의 양 방향으로 약액을 산포하는 4방향 산포 패턴과, 산포부(14L, 14R)에 의한 산포 방향이 한정된 방향 한정 산포 패턴이 포함된다. 상기 방향 한정 산포 패턴에는 산포부(14L)가 좌우의 양 방향으로 약액을 산포하고, 또한 산포부(14R)가 좌측 방향으로만 약액을 산포하는 좌측 3방향 산포 패턴과, 산포부(14L)가 우측 방향으로만 약액을 산포하고, 또한 산포부(14R)가 좌우의 양 방향으로 약액을 산포하는 우측 3방향 산포 패턴과, 산포부(14L)가 우측 방향으로만 약액을 산포하고, 또한 산포부(14R)가 좌측 방향으로만 약액을 산포하는 2방향 산포 패턴과, 산포부(14L)가 좌측 방향으로만 산포하고, 또한 산포부(14R)가 약액을 산포하지 않는 좌측 1방향 산포 패턴과, 산포부(14R)가 우측 방향으로만 산포하고, 또한 산포부(14L)가 약액을 산포하지 않는 우측 1방향 산포 패턴이 포함된다.
차체(100)에는 측위 장치(16)로부터 취득하는 측위 정보 등에 의거하여 차체(100)를 포장(F)의 목표 경로(R)에 따라 자동 주행시키는 자동 주행 제어부, 엔진에 관한 제어를 행하는 엔진 제어부, 정유압식 무단 변속 장치에 관한 제어를 행하는 HST(Hydro-Static Transmission) 제어부, 및 산포 장치(14) 등의 작업 장치에 관한 제어를 행하는 작업 장치 제어부 등이 탑재되어 있다. 각 제어부는 마이크로 컨트롤러 등이 탑재된 전자 제어 유닛, 마이크로 컨트롤러의 불휘발성 메모리(예를 들면, 플래시 메모리 등의 EEPROM)에 기억된 각종 정보 및 제어 프로그램 등에 의해 구축되어 있다. 불휘발성 메모리에 기억된 각종 정보에는 사전에 생성된 목표 경로(R) 등이 포함되어도 좋다. 본 실시형태에서는 각 제어부를 총칭해서 「차량 제어 장치(11)」라고 한다(도 2 참조).
측위 장치(16)는 측위 제어부(161), 기억부(162), 통신부(163), 및 안테나(164) 등을 구비하는 통신 기기이다. 안테나(164)는 차체(100)의 천장부(접속부(100C))의 전방 및 후방에 설치되어 있다(도 3 참조). 또한, 차체(100)의 천장부에는 작업 차량(10)의 주행 상태를 표시하는 표시등(102) 등이 설치되어 있다(도 3 참조). 또한, 측위 장치(16)에는 상기 배터리가 접속되어 있으며, 측위 장치(16)는 상기 엔진의 정지중에도 가동 가능하다.
통신부(163)는 측위 장치(16)를 유선 또는 무선으로 통신망(N1)에 접속하고, 통신망(N1)을 통해 기지국(40) 등의 외부 기기와의 사이에서 소정 통신 프로토콜에 따른 데이터 통신을 실행하기 위한 통신 인터페이스이다.
안테나(164)는 위성으로부터 발신되는 전파(GNSS 신호)를 수신하는 안테나이다. 안테나(164)가 작업 차량(10)의 전방 및 후방에 설치되어 있기 때문에 작업 차량(10)의 현재 위치를 고정밀도로 측위할 수 있다.
측위 제어부(161)는 1 또는 복수의 프로세서와, 불휘발성 메모리 및 RAM 등의 기억 메모리를 구비하는 컴퓨터 시스템이다. 기억부(162)는 측위 제어부(161)에 측위 처리를 실행시키기 위한 제어 프로그램 및 측위 정보, 이동 정보 등의 데이터를 기억하는 불휘발성 메모리 등이다. 측위 제어부(161)는 안테나(164)가 위성(50)으로부터 수신하는 GNSS 신호에 의거하여 소정 측위 방식(RTK 방식 등)에 의해 작업 차량(10)의 현재 위치를 측위한다.
장해물 검출 장치(17)는 차체(100)의 전방 좌측에 설치된 라이더 센서(171L)와, 차체(100)의 전방 우측에 설치된 라이더 센서(171R)를 구비한다(도 3 참조). 각 라이더 센서는, 예를 들면 라이더 센서가 조사한 레이저 광이 측거점에 도달하여 되돌아오기까지의 왕복 시간에 의거하여 측거점까지의 거리를 측정하는 TOF(Time Of Flight) 방식에 의해 라이더 센서로부터 측정 범위의 각 측거점(측정 대상물)까지의 거리를 측정한다.
라이더 센서(171L)는 차체(100)의 전방 좌측의 소정 범위가 측정 범위로 설정되어 있으며, 라이더 센서(171R)는 차체(100)의 전방 우측의 소정 범위가 측정 범위로 설정되어 있다. 각 라이더 센서는 측정한 각 측거점까지의 거리, 각 측거점에 대한 주사각(좌표) 등의 측정 정보를 차량 제어 장치(11)에 송신한다.
또한, 장해물 검출 장치(17)는 차체(100)의 전방측에 설치된 좌우의 초음파 센서(172F)(도 3 참조)와, 차체(100)의 후방측에 설치된 좌우의 초음파 센서(172R)(도 4A 및 도 4B 참조)를 구비한다. 각 초음파 센서는 초음파 센서가 발신한 초음파가 측거점에 도달하여 되돌아오기까지의 왕복 시간에 의거하여 측거점까지의 거리를 측정하는 TOF 방식에 의해 초음파 센서로부터 측정 대상물까지의 거리를 측정한다.
전방 좌측의 초음파 센서(172F)는 차체(100)의 전방 좌측의 소정 범위가 측정 범위로 설정되어 있으며, 전방 우측의 초음파 센서(172F)는 차체(100)의 전방 우측의 소정 범위가 측정 범위로 설정되어 있으며, 후방 좌측의 초음파 센서(172R)는 차체(100)의 후방 좌측의 소정 범위가 측정 범위로 설정되어 있으며, 후방 우측의 초음파 센서(172R)는 차체(100)의 후방 우측의 소정 범위가 측정 범위로 설정되어 있다. 각 초음파 센서는 측정한 측정 대상물까지의 거리와 측정 대상물의 방향을 포함하는 측정 정보를 차량 제어 장치(11)에 송신한다.
또한, 장해물 검출 장치(17)는 차체(100)의 전방측에 설치된 좌우의 접촉 센서(173F)(도 3 참조)와, 차체(100)의 후방측에 설치된 좌우의 접촉 센서(173R)(도 4A 및 도 4B 참조)를 구비한다. 차체(100)의 전방측의 접촉 센서(173F)는 접촉 센서(173F)에 장해물이 접촉한 경우에 장해물을 검출한다. 차체(100)의 후방측의 접촉 센서(173R)의 전방(작업 차량(10)의 후방측)에는 산포 장치(14)가 설치되어 있으며, 접촉 센서(173R)는 산포 장치(14)에 대해서 장해물이 접촉한 경우에 산포 장치(14)가 후방(작업 차량(10)의 전방측)으로 이동함으로써 장해물을 검출한다. 각 접촉 센서는 장해물을 검출한 경우에 검출 신호를 차량 제어 장치(11)에 송신한다.
차량 제어 장치(11)는 장해물 검출 장치(17)로부터 취득하는 장해물에 관한 측정 정보에 의거하여 작업 차량(10)이 장해물에 충돌할 가능성이 있을 경우에 장해물을 회피하는 회피 처리를 실행한다.
상기 구성에 의해 작업 차량(10)을 목표 경로(R)를 따라 고정밀도로 자동 주행시킬 수 있음과 아울러, 산포 장치(14)에 의한 약액 등의 산포 작업을 적정하게 행할 수 있다.
상술한 작업 차량(10)의 구성은 본 발명의 작업 차량의 일구성예이며, 본 발명은 상술한 구성에 한정되지 않는다. 상술한 작업 차량(10)은 제 1 작물 열(Vr)을 걸터타고 주행하면서 상기 제 1 작물 열(Vr)과, 상기 제 1 작물 열(Vr)의 좌우 방향 각각의 제 2 작물 열(Vr)에 산포물을 산포하는 산포 작업을 행하는 것이 가능한 차량이다. 다른 실시형태로서 작업 차량(10)은 차체(100)가 도어형의 형상이 아니라, 차체(100) 전체가 작물 열(Vr) 사이(작업 통로)를 주행하는 통상의 형상이어도 좋다. 이 경우 작업 차량(10)은 작물 열(Vr)을 걸터타지 않고 각 작업 통로를 순서대로 자동 주행한다. 또한, 산포 장치(14)는 1개의 산포부를 구비하고, 좌우의 양 방향으로 약액을 산포하는 산포 패턴과, 좌측 방향으로만 약액을 산포하는 산포 패턴과, 우측 방향으로만 약액을 산포하는 산포 패턴을 스위칭하여 산포 작업을 행한다.
[조작 단말(20)]
도 2에 나타내는 바와 같이 조작 단말(20)은 제어부(21), 기억부(22), 조작 표시부(23), 및 통신부(24) 등을 구비하는 정보 처리 장치이다. 조작 단말(20)은 태블릿 단말, 스마트폰 등의 휴대 단말로 구성되어도 좋다.
통신부(24)는 조작 단말(20)을 유선 또는 무선으로 통신망(N1)에 접속하고, 통신망(N1)을 통해 1 또는 복수의 작업 차량(10), 서버(30) 등의 외부 기기와의 사이에서 소정 통신 프로토콜에 따른 데이터 통신을 실행하기 위한 통신 인터페이스이다.
조작 표시부(23)는 각종 정보를 표시하는 액정 디스플레이 또는 유기 EL 디스플레이와 같은 표시부와, 조작을 받아들이는 터치 패널, 마우스, 또는 키보드와 같은 조작부를 구비하는 유저 인터페이스이다. 오퍼레이터는 상기 표시부에 표시되는 조작 화면에 있어서 상기 조작부를 조작해서 각종 정보(후술하는 작업 차량 정보, 포장 정보, 작업 정보 등)를 등록하는 조작을 행하는 것이 가능하다. 또한, 오퍼레이터는 상기 조작부를 조작해서 작업 차량(10)에 대한 작업 개시 지시, 주행 정지 지시 등을 행하는 것이 가능하다. 또한, 오퍼레이터는 작업 차량(10)으로부터 떨어진 장소에 있어서 조작 단말(20)에 표시되는 주행 궤적, 차체(100)의 주위 화상에 의해 포장(F) 내를 목표 경로(R)에 따라 자동 주행하는 작업 차량(10)의 주행 상태, 작업 상황, 및 주위의 상황을 파악하는 것이 가능하다.
기억부(22)는 각종 정보를 기억하는 HDD 또는 SSD 등의 불휘발성의 기억부이다. 기억부(22)에는 제어부(21)에 후술하는 자동 주행 처리(도 10 참조)를 실행시키기 위한 자동 주행 프로그램 등의 제어 프로그램이 기억되어 있다. 예를 들면, 상기 자동 주행 프로그램은 CD 또는 DVD 등의 컴퓨터 판독 가능한 기록 매체에 비일시적으로 기록되어 있으며, 소정 판독 장치(도시하지 않음)에서 판독되어 기억부(22)에 기억된다. 또한, 상기 자동 주행 프로그램은 서버(도시하지 않음)로부터 통신망(N1)을 통해 조작 단말(20)에 다운로드되어 기억부(22)에 기억되어도 좋다.
제어부(21)는 CPU, ROM, 및 RAM 등의 제어 기기를 갖는다. 상기 CPU는 각종 연산 처리를 실행하는 프로세서이다. 상기 ROM은 상기 CPU에 각종 연산 처리를 실행시키기 위한 BIOS 및 OS 등의 제어 프로그램이 미리 기억되는 불휘발성의 기억부이다. 상기 RAM은 각종 정보를 기억하는 휘발성 또는 불휘발성의 기억부이며, 상기 CPU가 실행하는 각종 처리의 일시 기억 메모리(작업 영역)로서 사용된다. 그리고 제어부(21)는 상기 ROM 또는 기억부(22)에 미리 기억된 각종 제어 프로그램을 상기 CPU에서 실행함으로써 조작 단말(20)을 제어한다.
도 2에 나타내는 바와 같이 제어부(21)는 설정 처리부(211), 생성 처리부(212), 출력 처리부(213) 등의 각종 처리부를 포함한다. 또한, 제어부(21)는 상기 CPU에서 상기 제어 프로그램에 따른 각종 처리를 실행함으로써 상기 각종 처리부로서 기능한다. 또한, 일부 또는 전부의 상기 처리부가 전자 회로로 구성되어 있어도 좋다. 또한, 상기 제어 프로그램은 복수의 프로세서를 상기 처리부로서 기능시키기 위한 프로그램이어도 좋다.
설정 처리부(211)는 작업 차량(10)에 관한 정보(이하, 작업 차량 정보라고 한다)와, 포장(F)에 관한 정보(이하, 포장 정보라고 한다)와, 작업(여기에서는 산포 작업)에 관한 정보(이하, 작업 정보라고 한다)를 설정해서 등록한다.
상기 작업 차량 정보의 설정 처리에 있어서 설정 처리부(211)는 작업 차량(10)의 기종, 작업 차량(10)에 있어서 안테나(164)가 부착되어 있는 위치, 작업기(여기에서는 산포 장치(14))의 종류, 작업기의 사이즈 및 형상, 작업기의 작업 차량(10)에 대한 위치, 작업 차량(10)의 작업중의 차속 및 엔진 회전수, 작업 차량(10)의 선회중의 차속 및 엔진 회전수 등의 정보에 대해서 오퍼레이터가 조작 단말(20)에 있어서 등록하는 조작을 행함으로써 상기 정보를 설정한다. 본 실시형태에서는 작업기의 정보로서 산포 장치(14)에 관한 정보가 설정된다.
상기 포장 정보의 설정 처리에 있어서 설정 처리부(211)는 포장(F)의 위치 및 형상, 작업을 개시하는 작업 개시 위치(S) 및 작업을 종료하는 작업 종료 위치(G)(도 6 참조), 작업 방향 등의 정보에 대해서 오퍼레이터가 조작 단말(20)에 있어서 등록하는 조작을 행함으로써 상기 정보를 설정한다. 또한, 작업 방향이란 포장(F)으로부터 헤드랜드 등의 비작업 영역을 제외한 영역인 작업 영역에 있어서 산포 장치(14)로 산포 작업을 행하면서 작업 차량(10)을 주행시키는 방향을 의미한다.
포장(F)의 위치 및 형상의 정보는, 예를 들면 오퍼레이터가 작업 차량(10)을 수동에 의해 포장(F)의 외주를 따라 1둘레 주회 주행시키고, 그 때의 안테나(164)의 위치 정보의 추이를 기록함으로써 자동적으로 취득할 수 있다. 또한, 포장(F)의 위치 및 형상은 조작 단말(20)에 지도를 표시시킨 상태로 오퍼레이터가 조작 단말(20)을 조작해서 상기 지도상의 복수의 점을 지정함으로써 얻어진 다각형에 의거하여 취득할 수도 있다. 취득된 포장(F)의 위치 및 형상에 의해 특정되는 영역은 작업 차량(10)을 주행시키는 것이 가능한 영역(주행 영역)이다.
상기 작업 정보의 설정 처리에 있어서 설정 처리부(211)는 작업 정보로서 작업 차량(10)이 헤드랜드에 있어서 선회할 경우에 스킵하는 작업 경로의 수인 스킵 수, 헤드랜드의 폭 등을 설정 가능하게 구성되어 있다.
생성 처리부(212)는 상기 각 설정 정보에 의거하여 작업 차량(10)을 자동 주행시키는 경로인 목표 경로(R)를 생성한다. 목표 경로(R)는, 예를 들면 작업 개시 위치(S)로부터 작업 종료 위치(G)까지의 경로이다(도 6 참조). 도 6에 나타내는 목표 경로(R)는 작물(V)이 심어진 영역에 있어서 작물(V)에 대해서 약액을 산포하는 직선형상의 작업 경로(R1)와, 산포 작업을 행하지 않고 작물 열(Vr) 사이를 이동하는 이동 경로(R2)를 포함한다.
구체적으로는 생성 처리부(212)는 목표 경로(R)의 후보인 복수의 후보 경로를 생성한다. 우선, 생성 처리부(212)는 상기 각 설정 정보와 작물(V)이 배치되는 위치에 의거하여 1개의 기준 후보 경로(r1)를 생성한다.
기준 후보 경로(r1)의 생성 방법의 일례에 대해서 도 7A~도 7F를 사용해서 설명한다. 도 7A~도 7F에는 작물 열(Vr)을 모식적으로 나타내고 있다. 우선, 오퍼레이터는 작업 차량(10)을 수동에 의해 작물 열(Vr)의 외주를 따라 주행시킨다(도 7A 참조). 작업 차량(10)은 주행중에 각 작물 열(Vr)의 일방측(도 7A의 하측)의 끝점(E1)과 타방측(도 7A의 상측)의 끝점(E2)을 검출하고, 각 끝점(E1, E2)의 위치 정보(좌표)를 취득한다. 또한, 끝점(E1, E2)은 이미 심어진 작물(V)의 위치이어도 좋고, 앞으로 심을 예정인 작물(V)의 위치를 나타내는 목표물의 위치이어도 좋다. 생성 처리부(212)는 작업 차량(10)으로부터 각 끝점(E1, E2)의 위치 정보(좌표)를 취득한다.
이어서, 도 7B에 나타내는 바와 같이 생성 처리부(212)는 복수의 끝점(E1)을 제 1 그룹(G1)으로 해서 그룹화하고, 복수의 끝점(E2)을 제 2 그룹(G2)으로 해서 그룹화한다. 이어서, 도 7C에 나타내는 바와 같이 생성 처리부(212)는 제 1 그룹(G1)에 포함되는 끝점(E1)끼리의 간격(w1)(열 간격)과, 제 2 그룹(G2)에 포함되는 끝점(E2)끼리의 간격(w2)(열 간격)을 산출한다. 또한, 생성 처리부(212)는 제 1 그룹(G1)에 포함되는 모든 끝점(E1)을 연결하는 직선(L1)과, 제 2 그룹(G2)에 포함되는 모든 끝점(E2)을 연결하는 직선(L2)을 생성하고, 직선(L1, L2) 각각의 기울기를 산출한다. 생성 처리부(212)는 열 사이(w1, w2)와 직선(L1, L2)의 기울기에 의거하여 제 1 그룹(G1) 및 제 2 그룹(G2) 각각에 있어서의 끝점(E1, E2)의 결락의 유무를 판정하고, 결락이 발생되어 있을 경우에 결락 개소에 가상점(Ev)을 삽입하여 결락된 끝점(E1, E2)을 보완한다. 도 7C에는 제 1 그룹(G1)에 2개의 가상점(Ev)을 삽입해서 제 2 그룹(G2)에 1개의 가상점(Ev)을 삽입한 예를 나타내고 있다.
이어서, 도 7D에 나타내는 바와 같이 생성 처리부(212)는 제 1 그룹(G1)의 각 끝점(E1)과 제 2 그룹(G2)의 각 끝점(E2)의 대향하는 끝점(E1, E2)끼리를 연결하는 직선(L3)을 생성한다. 이어서, 도 7E에 나타내는 바와 같이 생성 처리부(212)는 각 직선(L3)의 평균적인 기울기를 산출하고, 산출한 기울기를 갖는 기준선(L4)을 생성한다. 이어서, 생성 처리부(212)는 제 1 그룹(G1)의 각 끝점(E1)에 대해서 제 2 그룹(G2)의 각 끝점(E2)을 페어링하는 제 1 페어링 처리와, 제 2 그룹(G2)의 각 끝점(E2)에 대해서 제 1 그룹(G1)의 각 끝점(E1)을 페어링하는 제 2 페어링 처리를 실행한다.
구체적으로는 도 7E에 나타내는 바와 같이 생성 처리부(212)는 제 1 페어링 처리에 있어서 제 1 그룹(G1)에 있어서의 임의의 끝점(E1)을 원점으로 한 기준선(L4)을 생성하고, 기준선(L4)으로부터 기준값 이내에 존재하는 제 2 그룹(G2)의 복수의 끝점(E2)을 추출하고, 추출한 복수의 끝점(E2) 중 기준선(L4)에 거리(w3)가 가장 가까운 끝점(E2)을 기준선(L4)의 원점인 끝점(E1)과 페어링한다. 생성 처리부(212)는 제 1 페어링 처리를 제 1 그룹(G1)의 모든 끝점(E1)에 대해서 실행한다. 또한, 생성 처리부(212)는 제 2 페어링 처리에 있어서 제 2 그룹(G2)의 각 끝점(E2)을 원점으로 해서 제 1 페어링 처리와 마찬가지의 처리를 제 2 그룹(G2)의 모든 끝점(E2)에 대해서 실행한다. 생성 처리부(212)는 제 1 페어링 처리 및 제 2 페어링 처리를 실행한 후 각 페어링 처리의 페어링 결과가 동일한지의 여부를 판정하고, 페어링 결과가 동일한 경우에 페어링이 성공했다고 판정한다. 페어링이 성공하면 생성 처리부(212)는 도 7F에 나타내는 바와 같이 페어링한 끝점(E1, E2)을 연결하는 복수의 직선(L5)을 기준 후보 경로(r1)로서 생성한다.
이와 같이 생성 처리부(212)는 각 작물 열(Vr)에 있어서의 상기 작물 열(Vr)의 양 끝점(E1, E2)을 연결함으로써 기준 후보 경로(r1)를 생성한다. 기준 후보 경로(r1)의 생성 방법은 상술한 방법에 한정되지 않는다.
생성 처리부(212)는 기준 후보 경로(r1)를 생성하면 기준 후보 경로(r1)에 의거하여 다른 후보 경로를 생성한다. 구체적으로는 생성 처리부(212)는 기준 후보 경로(r1)에 대해서 소정 거리만큼 오프셋함으로써 다른 후보 경로를 생성한다. 예를 들면, 도 8에 나타내는 바와 같이 생성 처리부(212)는 기준 후보 경로(r1)에 대해서 X1(㎝)만큼 우측 방향으로 오프셋한 후보 경로(r2)와, 기준 후보 경로(r1)에 대해서 X1(㎝)만큼 좌측 방향으로 오프셋한 후보 경로(r3)를 생성한다. 상기 소정 거리는 미리 설정된 허용 범위 내의 값이며, 작업 차량(10) 및 작업기(산포 장치(14)) 각각의 종별 및 사이즈, 작물 열(Vr)의 간격(w1)(도 5 참조), 작업 통로의 간격(w2)(도 5 참조), 및 포장(F)의 경사 각도 중 적어도 어느 하나에 의거하여 설정된다. 또한, 상기 허용 범위는 작업 차량(10) 및 작업기(산포 장치(14)) 각각의 종별 및 사이즈, 작물 열(Vr)의 간격(w1), 작업 통로의 간격(w2), 및 포장(F)의 경사 각도 등에 의거하여 설정된다. 예를 들면, 상기 허용 범위가 ±5㎝로 설정되어 있을 경우 생성 처리부(212)는 기준 후보 경로(r1)에 대해서 ±5㎝의 오프셋량을 설정한다. 즉, 생성 처리부(212)는 기준 후보 경로(r1)에 대해서 5㎝만큼 우측 방향으로 오프셋한 후보 경로(r2)와, 기준 후보 경로(r1)에 대해서 5㎝만큼 좌측 방향으로 오프셋한 후보 경로(r3)를 생성한다. 또한, 우측 방향(+방향)의 오프셋량과, 좌측 방향(-방향)의 오프셋량이 서로 상이한 값으로 설정되어도 좋다.
또한, 상기 소정 거리는 상기 허용 범위 내에 있어서 난수를 사용해서 설정되어도 좋다. 예를 들면, 생성 처리부(212)는 -1.0~+1.0의 범위로 정규화된 난수를 생성하고, 생성한 난수를 상기 허용 범위의 최대값(상기 예에서는 5㎝)에 승산해서 산출된 값을 상기 소정 거리로서 설정한다. 이와 같이 생성 처리부(212)는 상기 오프셋량을 설정할 때마다 난수를 사용해서 랜덤한 오프셋량을 설정해도 좋다.
기준 후보 경로(r1)가 목표 경로(R)로서 설정된 경우에는 작업 차량(10)은 도 8의 실선으로 나타내는 경로를 자동 주행하고, 후보 경로(r2)가 목표 경로(R)로서 설정된 경우에는 작업 차량(10)은 도 8의 점선으로 나타내는 경로를 자동 주행하고, 후보 경로(r3)가 목표 경로(R)로서 설정된 경우에는 작업 차량(10)은 도 8의 1점 쇄선으로 나타내는 경로를 자동 주행한다.
또한, 도 8에 나타내는 바와 같이 생성 처리부(212)는 작업 경로(R1)가 되는 기준 후보 경로(r1)에 접속하는 이동 경로(R2)(도 8의 실선 경로)에 포함되는 선회 경로의 선회 개시 위치(c11)와, 작업 경로(R1)가 되는 후보 경로(r2)에 접속하는 이동 경로(R2)(도 8의 점선 경로)에 포함되는 선회 경로의 선회 개시 위치(c21)와, 작업 경로(R1)가 되는 후보 경로(r3)에 접속하는 이동 경로(R2)(도 8의 1점 쇄선 경로)에 포함되는 선회 경로의 선회 개시 위치(c31)를 서로 상이한 위치로 설정해도 좋다. 마찬가지로 생성 처리부(212)는 작업 경로(R1)가 되는 기준 후보 경로(r1)에 접속하는 이동 경로(R2)(도 8의 실선 경로)에 포함되는 선회 경로의 선회 종료 위치(c12)와, 작업 경로(R1)가 되는 후보 경로(r2)에 접속하는 이동 경로(R2)(도 8의 점선 경로)에 포함되는 선회 경로의 선회 종료 위치(c22)와, 작업 경로(R1)가 되는 후보 경로(r3)에 접속하는 이동 경로(R2)(도 8의 1점 쇄선 경로)에 포함되는 선회 경로의 선회 종료 위치(c32)를 서로 상이한 위치로 설정해도 좋다. 이것에 의해 작업 차량(10)은 작물 열(Vr)의 끝점 주변에 있어서의 작업지의 표토를 상하게 하는 일 없이 자동 주행하면서 작업을 행할 수 있다.
또한, 도 8에 나타내는 바와 같이 생성 처리부(212)는 작업 경로(R1)가 되는 기준 후보 경로(r1)에 접속하는 이동 경로(R2)(도 8의 실선 경로)에 포함되는 직진 경로(r0)와, 작업 경로(R1)가 되는 후보 경로(r2)에 접속하는 이동 경로(R2)(도 8의 점선 경로)에 포함되는 직진 경로(r0)와, 작업 경로(R1)가 되는 후보 경로(r3)에 접속하는 이동 경로(R2)(도 8의 1점 쇄선 경로)에 포함되는 직진 경로(r0)를 동일한 위치에 공통된 경로로서 설정해도 좋다. 이동 경로(R2)에 있어서는 작업 차량(10)은 작물(V)이 심어져 있지 않은 영역을 주행하기 때문에 표토를 상하게 해도 문제 없이 공통된 경로를 주행할 수 있다. 이것에 의해 작업 차량(10)이 선회 주행중 어느 위치를 주행할지 오퍼레이터는 파악하는 것이 가능해져 안전성을 향상시킬 수 있다.
또한, 제어부(21)는 도 8에 나타내는 후보 경로(r1~r3)의 정보를 조작 단말(20)에 표시시켜도 좋다. 예를 들면, 제어부(21)는 후보 경로(r1~r3) 각각을 서로 상이한 표시 상태로 조작 단말(20)에 표시시킨다. 이것에 의해 오퍼레이터는 조작 단말(20)에 있어서 후보 경로(r1~r3)를 용이하게 파악할 수 있다. 또한, 제어부(21)는 후보 경로(r1~r3) 중 작업 차량(10)이 전회 주행한 주행 경로를 시인 가능하게 표시시켜도 좋다. 이것에 의해 오퍼레이터는 조작 단말(20)에 있어서 작업 차량(10)이 전회 주행한 주행 경로 및 금회 선택해야 하는 후보 경로를 용이하게 파악할 수 있다.
이상과 같이 생성 처리부(212)는 목표 경로(R)의 후보가 되는 복수의 후보 경로를 생성한다. 상기 예에서는 생성 처리부(212)는 기준 후보 경로(r1)와 후보 경로(r2, r3)를 생성한다. 생성 처리부(212)는 생성한 복수의 후보 경로를 기억부(22)에 기억해도 좋다.
출력 처리부(213)는 생성 처리부(212)가 생성한 복수의 후보 경로를 서버(30)에 출력한다. 상기 예에서는 출력 처리부(213)는 기준 후보 경로(r1)와 후보 경로(r2, r3)를 포함하는 후보 경로의 경로 데이터를 서버(30)에 출력한다. 또한, 출력 처리부(213)는 상기 복수의 후보 경로의 경로 데이터를 작업 차량(10)에 출력해도 좋다.
제어부(21)는 상술한 처리에 추가하여 각종 정보를 조작 표시부(23)에 표시시키는 처리를 실행한다. 예를 들면, 제어부(21)는 작업 차량 정보, 포장 정보, 작업 정보 등을 등록하는 등록 화면, 후보 경로를 생성하는 조작 화면, 작업 차량(10)에 자동 주행을 개시시키는 조작 화면, 작업 차량(10)의 주행 상태 등을 표시하는 표시 화면 등을 조작 표시부(23)에 표시시킨다.
또한, 제어부(21)는 오퍼레이터로부터 각종 조작을 받아들인다. 구체적으로는 제어부(21)는 오퍼레이터로부터 작업 차량(10)에 작업을 개시시키는 작업 개시 지시, 자동 주행중의 작업 차량(10)의 주행을 정지시키는 주행 정지 지시 등을 받아들인다. 제어부(21)는 상기 각 지시를 받아들이면 상기 각 지시를 작업 차량(10)에 출력한다.
작업 차량(10)의 차량 제어 장치(11)는 조작 단말(20)로부터 작업 개시 지시를 취득하면 작업 차량(10)의 자동 주행 및 작업을 개시시킨다. 또한, 차량 제어 장치(11)는 조작 단말(20)로부터 주행 정지 지시를 취득하면 작업 차량(10)의 자동 주행 및 작업을 정지시킨다.
또한, 조작 단말(20)은 서버(30)가 제공하는 농업 지원 서비스의 웹 사이트(농업 지원 사이트)에 통신망(N1)을 통해 액세스 가능이어도 좋다. 이 경우 조작 단말(20)은 제어부(21)에 의해 브라우저 프로그램이 실행됨으로써 서버(30)의 조작용 단말로서 기능하는 것이 가능하다.
[서버(30)]
도 2에 나타내는 바와 같이 서버(30)는 제어부(31), 기억부(32), 조작 표시부(33), 및 통신부(34) 등을 구비하는 서버 장치이다. 또한, 서버(30)는 1대의 컴퓨터에 한정되지 않고, 복수 대의 컴퓨터가 협동해서 동작하는 컴퓨터 시스템이어도 좋다. 또한, 서버(30)에서 실행되는 각종 처리를 1 또는 복수의 프로세서가 분산해서 실행해도 좋다.
통신부(34)는 서버(30)를 유선 또는 무선으로 통신망(N1)에 접속하고, 통신망(N1)을 통해 1 또는 복수의 작업 차량(10), 1 또는 복수의 조작 단말(20) 등의 외부 기기와의 사이에서 소정 통신 프로토콜에 따른 데이터 통신을 실행하기 위한 통신 인터페이스이다.
조작 표시부(33)는 각종 정보를 표시하는 액정 디스플레이 또는 유기 EL 디스플레이와 같은 표시부와, 조작을 받아들이는 터치 패널, 마우스, 또는 키보드와 같은 조작부를 구비하는 유저 인터페이스이다.
기억부(32)는 각종 정보를 기억하는 HDD 또는 SSD 등의 불휘발성의 기억부이다. 기억부(32)에는 제어부(31)에 후술하는 자동 주행 처리(도 10 참조)를 실행시키기 위한 자동 주행 프로그램 등의 제어 프로그램이 기억되어 있다. 예를 들면, 상기 자동 주행 프로그램은 CD 또는 DVD 등의 컴퓨터 판독 가능한 기록 매체에 비일시적으로 기록되어 있으며, 소정 판독 장치(도시하지 않음)에서 판독되어 기억부(32)에 기억된다. 또한, 상기 자동 주행 프로그램은 다른 서버(도시하지 않음)로부터 통신망(N1)을 통해 서버(30)에 다운로드되어 기억부(32)에 기억되어도 좋다.
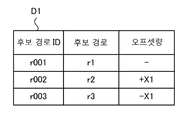
또한, 기억부(32)에는 조작 단말(20)로부터 출력되는 후보 경로의 경로 정보(D1)가 기억된다. 도 9에는 경로 정보(D1)의 위치를 나타내고 있다. 경로 정보(D1)에는 후보 경로마다 대응하는 「경로 ID」, 「후보 경로명」, 「오프셋량」 등의 정보가 포함된다. 상기 경로 ID는 후보 경로의 식별 정보이며, 상기 후보 경로명은 후보 경로의 명칭이다. 상기 오프셋량은 기준 후보 경로(r1)에 대한 오프셋량을 나타내는 정보이다. 도 9에는 기준 후보 경로(r1)(후보 경로 ID: 「r001」), 후보 경로(r2)(후보 경로 ID: 「r002」), 및 후보 경로(r3)(후보 경로 ID: 「r003」)에 관한 정보가 등록되어 있다. 각 후보 경로의 경로 데이터는 상기 경로 ID에 연관 지어져 기억부(32)에 기억된다.
또한, 기억부(32)에는 작업 차량(10)마다 상기 작업 차량(10)에 대응하는 경로 정보(D1)가 기억되어도 좋다. 예를 들면, 기억부(32)에 작업 차량(10A)에 대응하는 경로 정보(D1)와, 작업 차량(10B)에 대응하는 경로 정보(D1)가 기억되어도 좋다.
제어부(31)는 CPU, ROM, 및 RAM 등의 제어 기기를 갖는다. 상기 CPU는 각종 연산 처리를 실행하는 프로세서이다. 상기 ROM은 상기 CPU에 각종 연산 처리를 실행시키기 위한 BIOS 및 OS 등의 제어 프로그램이 미리 기억되는 불휘발성의 기억부이다. 상기 RAM은 각종 정보를 기억하는 휘발성 또는 불휘발성의 기억부이며, 상기 CPU가 실행하는 각종 처리의 일시 기억 메모리(작업 영역)로서 사용된다. 그리고 제어부(31)는 상기 ROM 또는 기억부(32)에 미리 기억된 각종 제어 프로그램을 상기 CPU에서 실행함으로써 서버(30)를 제어한다.
도 2에 나타내는 바와 같이 제어부(31)는 취득 처리부(311), 결정 처리부(312), 전송 처리부(313) 등의 각종 처리부를 포함한다. 또한, 제어부(31)는 상기 CPU에서 상기 제어 프로그램에 따른 각종 처리를 실행함으로써 상기 각종 처리부로서 기능한다. 또한, 일부 또는 전부의 상기 처리부가 전자 회로로 구성되어 있어도 좋다. 또한, 상기 제어 프로그램은 복수의 프로세서를 상기 처리부로서 기능시키기 위한 프로그램이어도 좋다.
취득 처리부(311)는 작업 차량(10) 및 조작 단말(20)로부터 각종 정보를 취득한다. 예를 들면, 취득 처리부(311)는 조작 단말(20)로부터 유저 정보, 포장 정보, 작업 예정 정보, 후보 경로 정보 등을 취득한다. 또한, 취득 처리부(311)는 작업 차량(10)으로부터 작업 실적 등의 정보를 취득한다. 예를 들면, 취득 처리부(311)는 조작 단말(20)로부터 상기 후보 경로의 경로 데이터를 취득하면 상기 후보 경로에 관한 경로 정보(D1)(도 9 참조)와 경로 데이터를 기억부(32)에 기억한다.
결정 처리부(312)는 작업 차량(10)을 자동 주행시키는 목표 경로(R)를 결정한다. 구체적으로는 결정 처리부(312)는 복수의 후보 경로 중으로부터 선택되는 후보 경로(본 발명의 제 1 후보 경로)를 목표 경로(R)로서 결정한다.
예를 들면, 결정 처리부(312)는 전회의 작업 시에 선택한 후보 경로와는 상이한 후보 경로를 선택해서 목표 경로(R)로 결정한다. 예를 들면, 작업 차량(10)이 전회의 작업 시에 후보 경로(r1)를 목표 경로(R)로서 자동 주행 및 산포 작업을 행한 경우에 금회의 작업에 있어서 결정 처리부(312)는 경로 정보(D1)에 등록된 복수의 후보 경로(r1~r3) 중으로부터 후보 경로(r2) 또는 후보 경로(r3)를 선택해서 목표 경로(R)로 결정한다. 여기에서 금회의 작업에 있어서 결정 처리부(312)가 후보 경로(r2)를 선택한 경우에는 차회의 작업에서는 결정 처리부(312)는 후보 경로(r1) 또는 후보 경로(r3)를 선택해서 목표 경로(R)로 결정한다.
이와 같이 결정 처리부(312)는 작업마다 복수의 후보 경로 중으로부터 전회의 작업 시에 선택한 후보 경로와는 상이한 후보 경로를 랜덤하게 선택해서 목표 경로(R)로 결정한다.
다른 실시형태로서 결정 처리부(312)는 유저(오퍼레이터)가 선택한 후보 경로를 목표 경로(R)로 결정해도 좋다. 예를 들면, 조작 단말(20)에 있어서 오퍼레이터가 후보 경로(r1~r3) 중으로부터 소망의 후보 경로를 선택하면 결정 처리부(312)는 오퍼레이터가 선택한 후보 경로를 목표 경로(R)로 결정한다. 또한, 조작 단말(20)은 후보 경로의 선택 화면에 과거(예를 들면, 전회)의 목표 경로(R)의 정보(주행 실적)를 표시시켜도 좋다. 이것에 의해 오퍼레이터는 전회의 작업 등 과거의 작업에 있어서 작업 차량(10)이 주행한 경로를 파악할 수 있다. 또한, 결정 처리부(312)는 전회의 작업 시에 선택된 후보 경로를 제외한 후보 경로 중으로부터 유저의 선택 조작을 받아들여도 좋다. 또한, 결정 처리부(312)는 과거의 주행 실적에 의거하여 복수의 후보 경로 중 주행 빈도가 낮은 후보 경로를 우선적으로 선택 화면에 표시시키거나, 복수의 후보 경로를 주행 빈도가 낮은 순서대로 선택 화면에 표시시키거나 해도 좋다.
다른 실시형태로서 결정 처리부(312)는 포장(F)의 표토(토양)의 상태에 의거하여 선택한 후보 경로를 목표 경로(R)로 결정해도 좋다. 예를 들면, 작업 차량(10)이 카메라(도시하지 않음)를 구비하고, 결정 처리부(312)는 전회의 작업 시에 상기 카메라가 촬상한 표토의 화상에 의거하여 금회의 작업의 후보 경로를 선택한다. 예를 들면, 결정 처리부(312)는 상기 화상을 해석한 결과, 후보 경로(r2)의 표토가 손상되어 있다(거칠어져 있다)고 판단한 경우에는 금회의 작업에 있어서 후보 경로(r1) 또는 후보 경로(r3)를 선택해서 목표 경로(R)로 결정한다. 또한, 예를 들면 결정 처리부(312)는 상기 화상을 해석한 결과, 후보 경로(r3)의 표토가 손상되어 있다고 판단한 경우에는 금회의 작업에 있어서 후보 경로(r1) 또는 후보 경로(r2)를 선택해서 목표 경로(R)로 결정한다. 또한, 결정 처리부(312)는 전회의 작업 시에 선택된 후보 경로의 정보와, 현재의 표토의 상태에 의거하여 후보 경로를 선택해서 목표 경로(R)로 결정해도 좋다. 상기 실시형태에 의한 작업 차량(10)에는 장해물 검출 장치(17) 및 상기 카메라가 병설되어도 좋다.
상기와 같이 본 발명의 제 1 후보 경로는 전회의 작업 시에 선택된 후보 경로와는 상이한 후보 경로이어도 좋고, 유저가 선택한 후보 경로이어도 좋고, 포장(F)의 표토 상태에 의거하여 선택되는 후보 경로이어도 좋다.
또한, 결정 처리부(312)는 조작 단말(20)로부터 자동 주행을 개시하는 지시(작업 개시 지시)를 취득한 경우에 목표 경로(R)를 결정하는 처리를 실행해도 좋다.
전송 처리부(313)는 결정 처리부(312)가 결정한 목표 경로(R)(도 6 참조)의 경로 데이터를 작업 차량(10)에 전송한다. 작업 차량(10)은 서버(30)로부터 전송되는 목표 경로(R)의 경로 데이터를 기억부(12)에 기억한다. 작업 차량(10)은 측위 장치(16)에 의해 작업 차량(10)의 현재 위치를 측위하면서 목표 경로(R)를 따라 자동 주행을 행한다.
여기에서 작업 차량(10)은 현재 위치가 포장(F) 내에 위치하고 있을 경우에 자동 주행할 수 있도록 구성되어 있으며, 현재 위치가 포장(F) 외(공도 등)에 위치하고 있을 경우에는 자동 주행할 수 없도록 구성되어 있다. 또한, 작업 차량(10)은, 예를 들면 현재 위치가 작업 개시 위치(S)와 일치하고 있을 경우에 자동 주행할 수 있도록 구성되어 있다.
작업 차량(10)은 현재 위치가 작업 개시 위치(S)와 일치하고 있을 경우에 오퍼레이터에 의해 조작 단말(20)에 있어서 스타트 버튼이 눌려 작업 개시 지시가 부여되면 차량 제어 장치(11)에 의해 자동 주행을 개시하고, 산포 장치(14)에 의한 산포 작업을 개시한다. 즉, 작업 차량(10)은 현재 위치가 작업 개시 위치(S)와 일치하고 있는 것을 조건으로 자동 주행을 허가한다. 또한, 작업 차량(10)의 자동 주행을 허가하는 조건은 상기 조건에 한정되지 않는다.
차량 제어 장치(11)는 서버(30)로부터 취득하는 목표 경로(R)에 의거하여 작업 차량(10)을 작업 개시 위치(S)로부터 작업 종료 위치(G)까지 자동 주행시킨다. 또한, 차량 제어 장치(11)는 작업 차량(10)이 작업을 종료하면 작업 종료 위치(G)로부터 포장(F)의 입구까지 자동 주행시켜도 좋다. 작업 차량(10)이 자동 주행하고 있을 경우 조작 단말(20)은 작업 차량(10)의 상태(위치, 주행 속도, 작업 상황 등)를 작업 차량(10)으로부터 수신해서 조작 표시부(23)에 표시시킬 수 있다.
다른 실시형태로서 서버(30)의 제어부(31)가 상기 기준 후보 경로를 생성하고, 또한 상기 기준 후보 경로에 의거하여 다른 후보 경로를 생성해도 좋다. 즉, 제어부(31)는 조작 단말(20)의 생성 처리부(212)의 기능을 구비해도 좋다. 또한, 다른 실시형태로서 조작 단말(20)의 제어부(21)가 상기 기준 후보 경로를 생성하고, 서버(30)의 제어부(31)가 다른 후보 경로를 생성해도 좋다.
다른 실시형태로서 조작 단말(20)이 상기 복수의 후보 경로의 경로 데이터를 작업 차량(10)에 출력하는 구성의 경우 작업 차량(10)의 차량 제어 장치(11)가 상기 복수의 후보 경로 중으로부터 선택되는 후보 경로를 목표 경로(R)로서 결정해도 좋다. 즉, 차량 제어 장치(11)는 서버(30)의 결정 처리부(312)의 기능을 구비해도 좋다. 이 경우 차량 제어 장치(11)는 조작 단말(20)로부터 작업 개시 지시를 취득하면 상기 복수의 후보 경로 중으로부터 선택되는 후보 경로를 목표 경로(R)로서 결정하고, 결정한 목표 경로(R)를 따라 자동 주행을 개시한다.
[자동 주행 처리]
이하, 도 10을 참조하면서 작업 차량(10)의 차량 제어 장치(11), 조작 단말(20)의 제어부(21), 및 서버(30)의 제어부(31)에 의해 실행되는 상기 자동 주행 처리의 일례에 대해서 설명한다.
또한, 본 발명은 상기 자동 주행 처리에 포함되는 1 또는 복수의 스텝을 실행하는 자동 주행 방법의 발명으로서 파악할 수 있다. 또한, 여기에서 설명하는 상기 자동 주행 처리에 포함되는 1 또는 복수의 스텝은 적당히 생략되어도 좋다. 또한, 상기 자동 주행 처리에 있어서의 각 스텝은 마찬가지의 작용 효과가 발생하는 범위에서 실행 순서가 상이해도 좋다. 또한, 여기에서는 차량 제어 장치(11), 제어부(21), 및 제어부(31)가 상기 자동 주행 처리에 있어서의 각 스텝을 실행할 경우를 예로 들어 설명하지만 1 또는 복수의 프로세서가 상기 자동 주행 처리에 있어서의 각 스텝을 분산해서 실행하는 자동 주행 방법도 다른 실시형태로서 생각된다. 또한, 상기 자동 주행 방법은 본 발명의 경로 결정 방법을 포함한다.
스텝(S1)에 있어서 조작 단말(20)의 제어부(21)는 각종 설정 정보를 등록한다. 구체적으로는 제어부(21)는 오퍼레이터의 설정 조작에 의거하여 작업 차량(10)에 관한 정보(작업 차량 정보)와, 포장(F)에 관한 정보(포장 정보)와, 작업에 관한 정보(작업 정보)를 설정해서 등록한다.
이어서, 스텝(S2)에 있어서 제어부(21)는 상기 각 설정 정보에 의거하여 목표 경로(R)의 후보가 되는 후보 경로를 생성한다. 예를 들면, 제어부(21)는 포장(F)에 있어서 작물(V)이 배치되는 위치에 의거하여 1개의 기준 후보 경로(r1)를 생성하고(도 7A~도 7F 참조), 기준 후보 경로(r1)에 대해서 소정 거리(+X1, -X1)만큼 오프셋함으로써 다른 후보 경로(r2, r3)를 생성한다(도 8 참조). 제어부(21)는 생성한 복수의 후보 경로(r1~r3)의 경로 데이터를 서버(30)에 출력한다.
이어서, 스텝(S3)에 있어서 서버(30)의 제어부(31)는 조작 단말(20)로부터 출력된 경로 데이터를 취득하면 후보 경로(r1~r3)에 관한 경로 정보(D1)(도 9 참조)와 경로 데이터를 기억부(32)에 기억한다.
스텝(S4)에 있어서 제어부(31)는 복수의 후보 경로(도 8, 도 9 참조) 중으로부터 선택되는 후보 경로를 목표 경로(R)로서 결정한다. 구체적으로는 제어부(31)는 전회의 작업 시에 선택한 후보 경로와는 상이한 후보 경로를 선택해서 목표 경로(R)로 결정한다. 또한, 제어부(31)는 오퍼레이터가 선택한 후보 경로를 목표 경로(R)로 결정해도 좋다. 또한, 제어부(31)는 포장(F)의 표토 상태에 의거하여 선택한 후보 경로를 목표 경로(R)로 결정해도 좋다.
이어서, 스텝(S5)에 있어서 제어부(31)는 결정한 목표 경로(R)의 경로 데이터를 작업 차량(10)에 전송한다.
이어서, 스텝(S6)에 있어서 작업 차량(10)의 차량 제어 장치(11)는 조작 단말(20)로부터 작업 개시 지시를 취득했는지의 여부를 판정한다. 예를 들면, 오퍼레이터가 조작 단말(20)에 있어서 스타트 버튼을 압하하면 조작 단말(20)은 작업 개시 지시를 작업 차량(10)에 출력한다. 차량 제어 장치(11)가 조작 단말(20)로부터 작업 개시 지시를 취득하면(S6: Yes) 처리는 스텝(S7)으로 이행한다. 차량 제어 장치(11)는 조작 단말(20)로부터 작업 개시 지시를 취득할 때까지 대기한다(S6: No).
이어서, 스텝(S7)에 있어서 차량 제어 장치(11)는 조작 단말(20)로부터 작업 개시 지시를 취득하고, 또한 서버(30)로부터 전송된 경로 데이터를 취득하면 상기 경로 데이터에 따라 목표 경로(R)를 따라 자동 주행을 개시한다. 또한, 차량 제어 장치(11)는 서버(30)로부터 취득한 상기 경로 데이터를 기억부(12)에 기억한다. 이것에 의해 작업 차량(10)은, 예를 들면 도 6에 나타내는 바와 같이 작업 개시 위치(S)로부터 자동 주행을 개시하고, 목표 경로(R)를 따라 작물 열(Vr1~Vr11)의 작물(V)에 약액을 산포하면서 작업 종료 위치(G)까지 자동 주행한다.
이어서, 스텝(S8)에 있어서 차량 제어 장치(11)는 작업 차량(10)이 작업을 종료했는지의 여부를 판정한다. 차량 제어 장치(11)는 작업 차량(10)의 위치가 작업 종료 위치(G)에 일치할 경우에 작업을 종료했다고 판정한다. 작업 차량(10)이 작업을 종료한 경우(S8: Yes) 상기 자동 주행 처리는 종료한다. 차량 제어 장치(11)는 작업 차량(10)이 작업을 종료할 때까지 스텝(S8)의 처리를 반복해서 자동 주행을 계속한다.
또한, 스텝(S1~S4)의 처리와, 스텝(S5~S8)의 처리는 독립적으로 실행되어도 좋다. 예를 들면, 자동 주행 시스템(1)은 작업 차량(10)을 도입한 초기 설정의 단계에서 스텝(S1~S4)의 처리를 실행한다. 또한, 자동 주행 시스템(1)은 오퍼레이터가 작업 차량(10)에서 작업을 행할 때에 스텝(S5~S8)의 처리를 실행한다.
이상 설명한 바와 같이 본 실시형태에 의한 자동 주행 시스템(1)은 작업지(예를 들면, 포장(F))에 있어서 복수 열로 배치된 작업 대상물(예를 들면, 작물(V))에 대해서 소정 작업(예를 들면, 산포 작업)을 행하면서 소정 열 순서로 자동 주행하는 작업 차량(10)을 주행시키는 목표 경로(R)의 후보인 복수의 후보 경로를 생성하고, 생성한 복수의 후보 경로 중으로부터 선택되는 제 1 후보 경로를 목표 경로(R)로서 결정한다. 또한, 본 실시형태에 의한 자동 주행 방법(경로 결정 방법)은 1 또는 복수의 프로세서가 작업지(예를 들면, 포장(F))에 있어서 복수 열로 배치된 작업 대상물(예를 들면, 작물(V))에 대해서 소정 작업(예를 들면, 산포 작업)을 행하면서 소정 열 순서로 자동 주행하는 작업 차량(10)을 주행시키는 목표 경로(R)의 후보인 복수의 후보 경로를 생성하는 것(생성 처리)과, 생성한 복수의 후보 경로 중으로부터 선택되는 제 1 후보 경로를 목표 경로(R)로서 결정하는 것(결정 처리)을 실행한다.
상기 구성에 의하면 작업 차량(10)을 주행시키는 목표 경로(R)가 복수의 후보 경로 중으로부터 선택되기 때문에, 예를 들면 작업 차량(10)을 전회 주행한 장소와는 상이한 장소를 주행시킬 수 있다. 이 때문에 작업 차량(10)이 작업을 행할 때마다 매회 동일한 장소를 주행하는 것을 방지할 수 있다. 이와 같이 작업 차량(10)의 주행 장소를 고정시키지 않고 분산시킬 수 있기 때문에 포장(F)의 표토를 상하게 하는 것을 방지할 수 있다. 따라서, 작업 차량(10)이 포장(F)의 표토를 상하게 하는 일 없이 자동 주행하면서 작업을 행하는 것이 가능한 목표 경로(R)를 생성할 수 있다.
또한, 상기 구성에 의하면 1개의 기준 후보 경로(r1)를 생성함으로써 기준 후보 경로(r1)를 이용해서 1 또는 복수의 후보 경로를 생성할 수 있기 때문에 자동 주행 시스템(1)에 있어서의 경로 생성의 처리 부하의 증대를 방지할 수 있다. 또한, 자동 주행 시스템(1)은 기준 후보 경로(r1)만을 생성해 두고, 작업 개시 지시를 취득한 시점에서 다른 후보 경로를 생성해서 목표 경로(R)를 결정해도 좋다.
또한, 자동 주행 시스템(1)은 기준 후보 경로(r1)에 대해서 허용 범위 내의 오프셋량에 의거하여 다른 후보 경로(r2, r3)를 생성하기 때문에 작업 차량(10)의 주행 및 작업의 안전성을 유지해서 주행 경로를 상이하게 할 수 있다.
다른 실시형태로서 서버(30)는 기준 후보 경로(r1)에 대한 오프셋량을 결정하고, 결정한 오프셋량의 정보를 작업 차량(10)에 출력해도 좋다. 이 경우 작업 차량(10)은 서버(30)로부터 상기 오프셋량을 취득하면 기준 후보 경로(r1)에 대해서 상기 오프셋량을 추가한 경로를 목표 경로(R)로 설정해서 자동 주행을 행한다. 서버(30)는 난수에 의해 상기 오프셋량을 결정해도 좋고, 미리 설정된 복수의 오프셋량 중으로부터 전회의 작업 시와는 상이한 오프셋량을 선택해도 좋다. 이것에 의해 서버(30) 또는 작업 차량(10)은 기억하는 경로 데이터의 데이터량을 삭감할 수 있다.
상술한 실시형태에서는 조작 단말(20) 및 서버(30)가 본 발명에 의한 경로 결정 시스템에 상당하지만 본 발명에 의한 경로 결정 시스템은 조작 단말(20) 단체 또는 서버(30) 단체로 구성되어도 좋다. 또한, 본 발명에 의한 경로 결정 시스템은 조작 단말(20), 서버(30), 및 작업 차량(10) 중 1 또는 복수의 구성 요소로 구성되어도 좋다.
1: 자동 주행 시스템
10: 작업 차량
11: 차량 제어 장치 20: 조작 단말
30: 서버 40: 기지국
50: 위성 211: 설정 처리부
212: 생성 처리부 213: 출력 처리부
311: 취득 처리부 312: 결정 처리부
313: 전송 처리부 E1, E2: 끝점
F: 포장(작업지) R: 목표 경로
V: 작물(작업 대상물) Vr: 작물 열
r1: 기준 후보 경로, 후보 경로(제 1 후보 경로)
r2: 후보 경로(제 1 후보 경로) r3: 후보 경로(제 1 후보 경로)
11: 차량 제어 장치 20: 조작 단말
30: 서버 40: 기지국
50: 위성 211: 설정 처리부
212: 생성 처리부 213: 출력 처리부
311: 취득 처리부 312: 결정 처리부
313: 전송 처리부 E1, E2: 끝점
F: 포장(작업지) R: 목표 경로
V: 작물(작업 대상물) Vr: 작물 열
r1: 기준 후보 경로, 후보 경로(제 1 후보 경로)
r2: 후보 경로(제 1 후보 경로) r3: 후보 경로(제 1 후보 경로)
Claims (13)
- 작업지에 있어서 복수 열로 배치된 작업 대상물에 대해서 소정 작업을 행하면서 소정 열 순서로 자동 주행하는 작업 차량을 주행시키는 목표 경로의 후보인 복수의 후보 경로를 생성하는 것과,
상기 복수의 후보 경로 중으로부터 선택되는 제 1 후보 경로를 상기 목표 경로로서 결정하는 것을 실행하는 경로 결정 방법. - 제 1 항에 있어서,
상기 작업지에 있어서 상기 작업 대상물이 배치되는 위치에 의거하여 1개의 기준 후보 경로를 생성하고,
상기 기준 후보 경로에 대해서 소정 거리만큼 오프셋함으로써 다른 후보 경로를 생성하는 경로 결정 방법. - 제 2 항에 있어서,
상기 소정 거리는 상기 작업 차량의 종별 및 사이즈, 상기 작업 대상물의 배열 간격, 및 상기 작업지의 경사 각도 중 적어도 어느 하나에 의거하여 설정되는 경로 결정 방법. - 제 2 항 또는 제 3 항에 있어서,
상기 작업지에 있어서 상기 작업 대상물은 복수 열로 배치되어 있으며,
각 열에 있어서의 상기 열의 양 끝점을 연결함으로써 상기 기준 후보 경로를 생성하는 경로 결정 방법. - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
상기 제 1 후보 경로는 전회의 작업 시에 선택된 후보 경로와는 상이한 후보 경로인 경로 결정 방법. - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
상기 제 1 후보 경로는 유저가 선택한 후보 경로인 경로 결정 방법. - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
상기 제 1 후보 경로는 상기 작업지의 표토 상태에 의거하여 선택되는 후보 경로인 경로 결정 방법. - 제 1 항 내지 제 7 항 중 어느 한 항에 있어서,
상기 목표 경로는 상기 작업 차량이 상기 소정 작업을 행하면서 직선형상으로 주행하는 복수의 작업 경로와, 상기 작업 차량이 상기 작업 경로 사이를 이동하는 이동 경로를 포함하고,
상기 이동 경로는 상기 작업 경로에 접속하는 선회 경로와, 상기 선회 경로에 접속하는 직진 경로를 포함하고,
상기 복수의 후보 경로 각각에 대응하는 상기 작업 경로에 접속하는 상기 선회 경로의 선회 개시 위치를 서로 상이한 위치로 설정하고, 상기 복수의 후보 경로 각각에 대응하는 상기 작업 경로에 접속하는 상기 선회 경로의 선회 종료 위치를 서로 상이한 위치로 설정하는 경로 결정 방법. - 제 8 항에 있어서,
상기 복수의 후보 경로 각각에 대응하는 상기 작업 경로에 접속하는 상기 선회 경로에 접속하는 상기 직진 경로를 공통된 경로로서 설정하는 경로 결정 방법. - 제 1 항 내지 제 9 항 중 어느 한 항에 있어서,
상기 목표 경로의 경로 데이터를 상기 작업 차량에 전송하는 것을 추가로 실행하는 경로 결정 방법. - 제 1 항 내지 제 10 항 중 어느 한 항에 있어서,
상기 복수의 후보 경로를 서로 상이한 표시 양태로 유저의 조작 단말에 표시시키는 것을 추가로 실행하는 경로 결정 방법. - 작업지에 있어서 복수 열로 배치된 작업 대상물에 대해서 소정 작업을 행하면서 소정 열 순서로 자동 주행하는 작업 차량을 주행시키는 목표 경로의 후보인 복수의 후보 경로를 생성하는 생성 처리부와,
상기 복수의 후보 경로 중으로부터 선택되는 제 1 후보 경로를 상기 목표 경로로서 결정하는 결정 처리부를 구비하는 경로 결정 시스템. - 작업지에 있어서 복수 열로 배치된 작업 대상물에 대해서 소정 작업을 행하면서 소정 열 순서로 자동 주행하는 작업 차량을 주행시키는 목표 경로의 후보인 복수의 후보 경로를 생성하는 것과,
상기 복수의 후보 경로 중으로부터 선택되는 제 1 후보 경로를 상기 목표 경로로서 결정하는 것을 1 또는 복수의 프로세서로 실행시키기 위한 경로 결정 프로그램.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2021-091528 | 2021-05-31 | ||
| JP2021091528A JP7714382B2 (ja) | 2021-05-31 | 2021-05-31 | 経路決定方法、経路決定システム、及び経路決定プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220162042A true KR20220162042A (ko) | 2022-12-07 |
Family
ID=81850539
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020220052058A Pending KR20220162042A (ko) | 2021-05-31 | 2022-04-27 | 경로 결정 방법, 경로 결정 시스템, 및 경로 결정 프로그램 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220382292A1 (ko) |
| EP (1) | EP4099120A1 (ko) |
| JP (1) | JP7714382B2 (ko) |
| KR (1) | KR20220162042A (ko) |
| CN (1) | CN115480564A (ko) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12517524B2 (en) * | 2023-01-20 | 2026-01-06 | Deere & Company | Datum conversion between receiver navigation modes for guidance planning |
| EP4428648A1 (en) | 2023-03-10 | 2024-09-11 | Yanmar Holdings Co., Ltd. | Automatic traveling method, automatic traveling system and work vehicle supporting the system |
| JP7826236B2 (ja) | 2023-03-10 | 2026-03-09 | ヤンマーホールディングス株式会社 | 散布機の制御方法、散布機の制御プログラム、散布機の制御システム、及び散布機 |
| JP2025004520A (ja) * | 2023-06-26 | 2025-01-15 | 株式会社クボタ | 自動走行制御システム |
| JP2025010834A (ja) * | 2023-07-10 | 2025-01-23 | トヨタ自動車株式会社 | 走行経路管理システム |
| JP2025117599A (ja) | 2024-01-31 | 2025-08-13 | ヤンマーホールディングス株式会社 | 作業車両の制御方法、作業車両制御プログラム、作業車両制御システム及び作業車両 |
| JP2025117598A (ja) | 2024-01-31 | 2025-08-13 | ヤンマーホールディングス株式会社 | 作業車両の制御方法、作業車両制御プログラム、作業車両制御システム及び作業車両 |
| JP2025117600A (ja) | 2024-01-31 | 2025-08-13 | ヤンマーホールディングス株式会社 | 作業車両の制御方法、作業車両制御プログラム、作業車両制御システム及び作業車両 |
| JP2025117601A (ja) | 2024-01-31 | 2025-08-13 | ヤンマーホールディングス株式会社 | 作業車両の制御方法、作業車両制御プログラム、作業車両制御システム及び作業車両 |
| JP2025147387A (ja) | 2024-03-25 | 2025-10-07 | ヤンマーホールディングス株式会社 | 作業車両の走行制御方法、走行制御プログラム、走行制御システム及び作業車両 |
| JP2025147388A (ja) | 2024-03-25 | 2025-10-07 | ヤンマーホールディングス株式会社 | 作業車両の走行制御方法、走行制御プログラム、走行制御システム及び作業車両 |
| JP2025147389A (ja) | 2024-03-25 | 2025-10-07 | ヤンマーホールディングス株式会社 | 作業車両の走行制御方法、走行制御プログラム、走行制御システム及び作業車両 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021000021A (ja) | 2019-06-20 | 2021-01-07 | ヤンマーパワーテクノロジー株式会社 | 散布作業用の自動走行システム |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0543204U (ja) * | 1991-11-13 | 1993-06-11 | ヤンマー農機株式会社 | 自動操向誘導装置 |
| US6442456B2 (en) * | 2000-03-07 | 2002-08-27 | Modular Mining Systems, Inc. | Anti-rut system for autonomous-vehicle guidance |
| JP3582449B2 (ja) * | 2000-03-17 | 2004-10-27 | 日産自動車株式会社 | 車両用自動操舵装置 |
| JP4185813B2 (ja) | 2003-05-28 | 2008-11-26 | ヤンマー株式会社 | ナビゲーションシステム |
| US9020757B2 (en) * | 2012-05-11 | 2015-04-28 | Trimble Navigation Limited | Path planning autopilot |
| US9795074B2 (en) * | 2015-10-27 | 2017-10-24 | Cnh Industrial America Llc | Automatic swath generation device and methods |
| JP2017131130A (ja) * | 2016-01-26 | 2017-08-03 | 井関農機株式会社 | 農作業支援システム |
| JP6531055B2 (ja) | 2016-03-24 | 2019-06-12 | ヤンマー株式会社 | 経路生成装置 |
| CA2953477C (en) * | 2016-04-28 | 2020-06-02 | Komatsu Ltd. | Work machine management apparatus |
| JP6770839B2 (ja) * | 2016-07-08 | 2020-10-21 | 株式会社クボタ | 経路探索プログラムと、経路探索システムと、この経路探索システムを組み込んだ作業車 |
| JP6673862B2 (ja) * | 2017-03-03 | 2020-03-25 | ヤンマー株式会社 | 走行経路特定システム |
| JP6707481B2 (ja) * | 2017-03-03 | 2020-06-10 | ヤンマーパワーテクノロジー株式会社 | 作業画面表示システム |
| JP7179565B2 (ja) * | 2018-10-04 | 2022-11-29 | 株式会社クボタ | 作業車両 |
| JP7026603B2 (ja) * | 2018-11-19 | 2022-02-28 | 株式会社クボタ | 作業車の走行支援装置及び作業車 |
| JP2020201578A (ja) * | 2019-06-06 | 2020-12-17 | ヤンマーパワーテクノロジー株式会社 | 圃場管理システム |
| JP7161976B2 (ja) * | 2019-06-20 | 2022-10-27 | ヤンマーパワーテクノロジー株式会社 | 作業車両用の自動走行システム |
| US11248918B2 (en) * | 2019-08-16 | 2022-02-15 | Toyota Motor Engineering & Manufacturing North America, Inc. | Integrated training navigation system |
-
2021
- 2021-05-31 JP JP2021091528A patent/JP7714382B2/ja active Active
-
2022
- 2022-04-27 KR KR1020220052058A patent/KR20220162042A/ko active Pending
- 2022-05-16 EP EP22173459.3A patent/EP4099120A1/en active Pending
- 2022-05-26 US US17/826,010 patent/US20220382292A1/en active Pending
- 2022-05-27 CN CN202210586044.1A patent/CN115480564A/zh active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021000021A (ja) | 2019-06-20 | 2021-01-07 | ヤンマーパワーテクノロジー株式会社 | 散布作業用の自動走行システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7714382B2 (ja) | 2025-07-29 |
| JP2022183962A (ja) | 2022-12-13 |
| US20220382292A1 (en) | 2022-12-01 |
| CN115480564A (zh) | 2022-12-16 |
| EP4099120A1 (en) | 2022-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20220162042A (ko) | 경로 결정 방법, 경로 결정 시스템, 및 경로 결정 프로그램 | |
| KR20220162046A (ko) | 경로 생성 방법, 경로 생성 장치, 및 경로 생성 프로그램 | |
| JP7578543B2 (ja) | 自動走行方法、自動走行システム、及び自動走行プログラム | |
| JP2025159054A (ja) | 自動走行方法、自動走行システム、及び作業車両 | |
| US12386355B2 (en) | Route generation method, device, and program for a work vehicle operating in a narrow area | |
| KR20230071079A (ko) | 작업 관리 방법, 작업 관리 시스템, 및 작업 관리 프로그램 | |
| EP4098116A1 (en) | Spraying work method, spraying work system, and spraying work program | |
| EP4104651A1 (en) | Automatic traveling method, automatic traveling system, and automatic traveling program | |
| EP4428647B1 (en) | Automatic traveling method, automatic traveling program, automatic traveling system, and work vehicle | |
| EP4105755B1 (en) | Automatic traveling method, automatic traveling system, and automatic traveling program | |
| EP4099124B1 (en) | Automatic traveling method, automatic traveling system, and automatic traveling program | |
| JP7705738B2 (ja) | 自動走行方法、自動走行システム、及び自動走行プログラム | |
| JP2023072849A (ja) | 作業管理方法、作業管理システム、及び作業管理プログラム | |
| JP2023072848A (ja) | 作業管理方法、作業管理システム、及び作業管理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |