KR20230077479A - 차량 및 차량의 제어방법 - Google Patents
차량 및 차량의 제어방법 Download PDFInfo
- Publication number
- KR20230077479A KR20230077479A KR1020210164790A KR20210164790A KR20230077479A KR 20230077479 A KR20230077479 A KR 20230077479A KR 1020210164790 A KR1020210164790 A KR 1020210164790A KR 20210164790 A KR20210164790 A KR 20210164790A KR 20230077479 A KR20230077479 A KR 20230077479A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- area
- movement
- danger
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/26—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic
- B60Q1/50—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/26—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic
- B60Q1/50—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking
- B60Q1/525—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking automatically indicating risk of collision between vehicles in traffic or with pedestrians, e.g. after risk assessment using the vehicle sensor data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/24—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments for lighting other areas than only the way ahead
- B60Q1/247—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments for lighting other areas than only the way ahead for illuminating the close surroundings of the vehicle, e.g. to facilitate entry or exit
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/0017—Devices integrating an element dedicated to another function
- B60Q1/0023—Devices integrating an element dedicated to another function the element being a sensor, e.g. distance sensor, camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/26—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic
- B60Q1/50—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking
- B60Q1/547—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking for issuing requests to other traffic participants; for confirming to other traffic participants they can proceed, e.g. they can overtake
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/107—Longitudinal acceleration
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
- G08G1/163—Decentralised systems, e.g. inter-vehicle communication involving continuous checking
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/11—Linear movements of the vehicle
- B60Q2300/114—Vehicle acceleration or deceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2400/00—Special features or arrangements of exterior signal lamps for vehicles
- B60Q2400/50—Projected symbol or information, e.g. onto the road or car body
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/12—Lateral speed
- B60W2520/125—Lateral acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4029—Pedestrians
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Lighting Device Outwards From Vehicle And Optical Signal (AREA)
Abstract
일 실시예에 의한 차량 및 차량의 제어 방법은, 지면으로 빛을 조사하는 표시부, 외부 단말과의 통신으로 차량의 이동신호를 수신하는 통신부, 수신된 상기 차량의 이동신호에 기초하여 상기 차량의 이동영역을 결정하고, 상기 이동영역에 포함된 위험영역 및 안전영역을 결정하고, 상기 위험영역 및 상기 안전영역에 빛을 조사하도록 표시부를 제어하는 제어부를 포함하는 차량 및 차량의 제어 방법을 제공한다.
Description
개시된 발명은 4륜 독립 구동과 조향을 위한 차량에서 차량 이동시 안전영역과 위험영역을 구분하여 표시할 수 있는 차량 및 차량의 제어방법에 관한 것이다.
기존의 차량은 2개의 모드(직진, 좌/우턴)로만 휠을 조향하기 때문에 적은 조작계만 이용하여 직관적으로 운전할 수 있다. 이에 반해 4륜 독립 조향시스템(4WS)은 각 바퀴를 독립적으로 제어 가능하므로 다양한 차량의 거동을 만들 수 있다.
4륜 독립 조향시스템은 차량의 다양한 거동을 만들 수 있지만, 그에 따라 운전자 및 보행자가 차량의 이동영역을 예측하기 어렵다.
그러므로 사고 방지 및 운전자의 운전 편의를 위해 4륜 독립 조향시스템을 갖춘 차량에서 차량의 이동영역을 결정하고 차량 주변에 이동영역을 표시할 수 있는 기술이 필요하다.
개시된 발명의 일 측면은 차량의 이동영역을 결정하고, 이동영역에 포함된 위험영역 및 안전영역을 결정하고, 위험영역 및 안전영역에 빛을 조사하여 표시할 수 있는 차량 및 차량의 제어방법을 제공하고자 한다.
일 실시예에 따른 차량은 지면으로 빛을 조사하는 표시부, 외부 단말과의 통신으로 차량의 이동신호를 수신하는 통신부, 수신된 상기 차량의 이동신호에 기초하여 상기 차량의 이동영역을 결정하고, 상기 이동영역에 포함된 위험영역 및 안전영역을 결정하고, 상기 위험영역 및 상기 안전영역에 빛을 조사하도록 표시부를 제어하는 제어부를 포함한다.
상기 제어부는, 상기 차량과 상기 외부 단말에 구비된 적어도 하나의 카메라로 상기 차량 주변의 장애물을 검출하여 상기 장애물을 회피하는 경로로 상기 이동영역을 결정할 수 있다.
상기 제어부는, 상기 차량의 횡가속도에 따라 빛 조사 영역을 달리하고, 상기 횡가속도는 상기 차량의 출발 토크 값 및 상기 차량의 제원으로 계산할 수 있다.
상기 제어부는, 상기 차량의 구동 토크 및 상기 차량의 제원으로 선회 중심점 및 이동 반경을 계산하여 상기 이동영역을 결정할 수 있다.
상기 제어부는, 상기 위험영역과 상기 안전영역을 빛의 조사색상 및 조사강도로 구분하여 이동영역을 알릴 수 있다.
상기 제어부는, 상기 위험영역을 상기 차량의 전장거리를 지름으로 하는 반원에 해당하는 제1영역과, 나머지 부분에 해당하는 제2영역으로 나누고, 상기 제2영역은 상기 차량의 출발 토크 값과 상기 차량의 제원으로 계산된 횡가속도에 따라 빛 조사 영역을 달리할 수 있다.
상기 제어부는, 상기 횡가속도가 증가하는 것에 기초하여 상기 빛 조사 영역의 반원 지름을 증가시킬 수 있다.
상기 제어부는, 상기 차량의 스티어링 휠 조작이나 턴 시그널의 방향에 기초하여 상기 이동영역을 결정할 수 있다.
상기 제어부는, 상기 차량의 휠 단차 센서로 노면의 단차를 계산하여 수평 보정 후에 상기 차량과 상기 외부 단말에 구비된 적어도 하나의 카메라로 상기 차량 주변의 장애물을 검출하여 상기 이동영역을 결정할 수 있다.
일 실시예에 의한 차량의 제어 방법은, 지면으로 빛을 조사하는 단계, 외부 단말과의 통신으로 차량의 이동신호를 수신하는 단계, 수신된 상기 차량의 이동신호에 기초하여 상기 차량의 이동영역을 결정하는 단계, 상기 이동영역에 포함된 위험영역 및 안전영역을 결정하는 단계, 상기 위험영역 및 상기 안전영역에 빛을 조사하는 단계를 포함한다.
일 실시예에 의한 차량의 제어 방법은, 상기 차량의 출발 토크 값과 상기 차량의 제원으로 계산된 횡가속도에 따라 빛 조사 영역을 달리하는 단계를 더 포함한다.
상기 차량의 이동영역을 결정하는 단계는, 상기 차량과 상기 외부 단말에 구비된 적어도 하나의 카메라로 상기 차량 주변의 장애물을 검출하여 상기 이동영역을 결정한다.
상기 차량의 이동영역을 결정하는 단계는, 상기 차량의 구동 토크 및 상기 차량의 제원으로 선회 중심점 및 이동 반경을 계산하여 상기 이동영역을 결정한다.
상기 위험영역 및 상기 안전영역에 빛을 조사하는 단계는, 상기 위험영역과 상기 안전영역을 빛의 조사색상 및 조사강도로 구분하여 이동영역을 알릴 수 있다.
상기 위험영역 및 상기 안전영역에 빛을 조사하는 단계는, 상기 위험영역을 상기 차량의 전장거리를 지름으로 하는 반원에 해당하는 제1영역과, 나머지 부분에 해당하는 제2영역으로 나누고, 상기 제2영역은 상기 차량의 출발 토크 값과 상기 차량의 제원으로 계산된 횡가속도에 따라 빛 조사 영역을 달리할 수 있다.
상기 빛 조사 영역을 달리하는 단계는, 상기 횡가속도가 증가하는 것에 기초하여 상기 빛 조사 영역의 반원 지름을 증가시킬 수 있다.
상기 위험영역 및 상기 안전영역에 빛을 조사하는 단계는, 상기 차량의 스티어링 휠 조작이나 턴 시그널의 방향에 기초하여 빛을 조사할 수 있다.
상기 차량의 이동영역을 결정하는 단계는. 상기 차량의 휠 단차 센서로 노면의 단차를 계산하여 상기 차량의 수평 보정 후에 상기 차량 주변의 장애물을 검출하여 상기 이동영역을 결정할 수 있다.
개시된 발명의 일 실시예에 따르면, 차량의 외부에서 스마트폰 화면 만으로 차량의 움직임을 예측하기 어려운 점을 보완하고, 차량의 이동영역을 쉽게 파악할 수 있다.
또한, 외부 객체가 차량의 이동영역을 쉽게 파악할 수 있고, 위험영역과 안전영역을 구분하여 표시되므로 외부 객체의 통행을 방해하지 않으면서 안전을 도모할 수 있다.
도1은 일 실시예에 의한 차량의 제어 블록도를 나타낸 도면이다.
도2는 일 실시예에 의한 차량에서 4륜 독립 구동을 위한 조향 구조를 설명한 도면이다.
도3은 일 실시예에 의한 차량에서 노면 단차 보정을 위한 차량의 구조를 나타낸 도면이다.
도4는 일 실시예에 의한 차량에서 퍼들 램프를 이용하여 이동방향을 예측하고 이동영역을 표시하는 것을 나타낸 도면이다.
도5는 일 실시예에 의한 차량에서 차량의 이동과 차량 카메라에 의한 장애물 인식 영역을 나타낸 도면이다.
도6은 일 실시예에 의한 차량에서 위험영역과 안전영역을 구분하여 표현한 도면이다.
도7은 일 실시예에 의한 차량에서 위험영역과 안전영역을 구분하고, 위험영역을 세분화한 도면이다.
도8은 일 실시예에 의한 차량에서 횡 가속도와 빛 조사 영역의 관계를 나타낸 도면이다.
도9는 일 실시예에 의한 차량에서 빛 조사 영역의 실시간 변화를 나타낸 도면이다.
도10은 일 실시예에 의한 차량이 제자리 선회하는 실시예를 나타낸 도면이다.
도11은 일 실시예에 의한 차량에서 노면 단차를 보정하는 과정에 대해 설명하는 도면이다.
도12는 일 실시예에 의한 차량의 제어 흐름도를 나타낸 도면이다.
도2는 일 실시예에 의한 차량에서 4륜 독립 구동을 위한 조향 구조를 설명한 도면이다.
도3은 일 실시예에 의한 차량에서 노면 단차 보정을 위한 차량의 구조를 나타낸 도면이다.
도4는 일 실시예에 의한 차량에서 퍼들 램프를 이용하여 이동방향을 예측하고 이동영역을 표시하는 것을 나타낸 도면이다.
도5는 일 실시예에 의한 차량에서 차량의 이동과 차량 카메라에 의한 장애물 인식 영역을 나타낸 도면이다.
도6은 일 실시예에 의한 차량에서 위험영역과 안전영역을 구분하여 표현한 도면이다.
도7은 일 실시예에 의한 차량에서 위험영역과 안전영역을 구분하고, 위험영역을 세분화한 도면이다.
도8은 일 실시예에 의한 차량에서 횡 가속도와 빛 조사 영역의 관계를 나타낸 도면이다.
도9는 일 실시예에 의한 차량에서 빛 조사 영역의 실시간 변화를 나타낸 도면이다.
도10은 일 실시예에 의한 차량이 제자리 선회하는 실시예를 나타낸 도면이다.
도11은 일 실시예에 의한 차량에서 노면 단차를 보정하는 과정에 대해 설명하는 도면이다.
도12는 일 실시예에 의한 차량의 제어 흐름도를 나타낸 도면이다.
본 명세서에 기재된 실시예와 도면에 도시된 구성은 개시된 발명의 바람직한 일 예이며, 본 출원의 출원시점에 있어서 본 명세서의 실시예와 도면을 대체할 수 있는 다양한 변형 예들이 있을 수 있다.
또한, 본 명세서의 각 도면에서 제시된 동일한 참조번호 또는 부호는 실질적으로 동일한 기능을 수행하는 부품 또는 구성요소를 나타낸다.
또한, 본 명세서에서 사용한 용어는 실시예를 설명하기 위해 사용된 것으로, 개시된 발명을 제한 및/또는 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 명세서에서, "포함하다", "구비하다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는다.
또한, 본 명세서에서 사용한 "제1", "제2" 등과 같이 서수를 포함하는 용어는 다양한 구성 요소들을 설명하는데 사용될 수 있지만, 상기 구성 요소들은 상기 용어들에 의해 한정되지는 않으며, 상기 용어들은 하나의 구성 요소를 다른 구성요소로부터 구별하는 목적으로만 사용된다. 예를 들어, 본 발명의 권리 범위를 벗어나지 않으면서 제1구성 요소는 제2구성 요소로 명명될 수 있고, 유사하게 제2 구성요소도 제1구성 요소로 명명될 수 있다. "및/또는" 이라는 용어는 복수의 관련된 기재된 항목들의 조합 또는 복수의 관련된 기재된 항목들 중의 어느 항목을 포함한다.
또한, "~부", "~기", "~블록", "~부재", "~모듈" 등의 용어는 적어도 하나의 기능이나 동작을 처리하는 단위를 의미할 수 있다. 예를 들어, 상기 용어들은 FPGA(field-programmable gate array)/ASIC(application specific integrated circuit) 등 적어도 하나의 하드웨어, 메모리에 저장된 적어도 하나의 소프트웨어 또는 프로세서에 의하여 처리되는 적어도 하나의 프로세스를 의미할 수 있다.
각 단계들에 붙여지는 부호는 각 단계들을 식별하기 위해 사용되는 것으로 이들 부호는 각 단계들 상호 간의 순서를 나타내는 것이 아니며, 각 단계들은 문맥상 명백하게 특정 순서를 기재하지 않는 이상 명기된 순서와 다르게 실시될 수 있다.
한편, 개시된 실시예들은 컴퓨터에 의해 실행 가능한 명령어를 저장하는 기록매체의 형태로 구현될 수 있다. 명령어는 프로그램 코드의 형태로 저장될 수 있으며, 프로세서에 의해 실행되었을 때, 개시된 실시예들의 동작을 수행할 수 있다. 기록매체는 컴퓨터로 읽을 수 있는 기록매체로 구현될 수 있다.
컴퓨터가 읽을 수 있는 기록매체로는 컴퓨터에 의하여 해독될 수 있는 명령어가 저장된 모든 종류의 기록 매체를 포함한다. 예를 들어, ROM(Read Only Memory), RAM(Random Access Memory), 자기 테이프, 자기 디스크, 플래쉬 메모리(160), 광 데이터 저장장치 등이 있을 수 있다.
이하에서는 첨부된 도면을 참조하여 일 측면에 의한 차량(100) 및 차량(100)의 제어 방법에 관한 실시예를 상세하게 설명하도록 한다.
도1은 일 실시예에 의한 차량(100)의 제어 블록도를 나타낸 도면이다.
도1을 참조하면, 차량(100)은 외부 및 내부 장치와 유/무선 통신을 수행하는 통신부(120), 경고를 표시하는 사용자 인터페이스(130), 차량(100)의 주변을 촬영하는 카메라(140), 지면으로 빛을 조사하는 표시부(150), 차량(100) 관련 제어를 위해 필요한 정보를 일시적 또는 비일시적으로 저장하는 메모리(160) 및 전술한 구성요소를 제어하는 제어부(110)를 포함한다.
또한 차량(100)은 제어부(110)에 의해 통신부(120)를 제어하여 스마트폰, 노트북 등의 외부 단말(200)과 무선으로 통신할 수 있다.
통신부(120)는 무선 통신 기지국을 통하여 타 차량(700) 또는 교통 인프라와 통신할 수 있으며, 무선 통신부(121)와 유선 통신부(122)로 구성될 수 있다.
통신 방식의 예를 들면, 통신부(120)는 시간 분할 다중 접속(Time Division Multiple Access: TDMA)과 부호 분할 다중 접속(Code Division Multiple Access: CDMA) 등의 제2 세대(2G) 통신 방식, 광대역 부호 분할 다중 접속(Wide Code Division Multiple Access: WCDMA)과 CDMA2000(Code Division Multiple Access 2000)과 와이브로(Wireless Broadband: Wibro)와 와이맥스(World Interoperability for Microwave Access: WiMAX) 등의 3세대(3G) 통신 방식, 엘티이(Long Term Evolution: LTE)와 와이브로 에볼류션(Wireless Broadband Evolution) 등 4세대(4G) 통신 방식을 채용할 수 있다. 통신부(120)는 5세대(5G) 통신 방식을 채용할 수도 있다.
통신부(120)는 외부 장치와 통신을 가능하게 하는 하나 이상의 구성 요소를 포함할 수 있으며, 예를 들어 근거리 통신 모듈, 유선 통신부(122) 및 무선 통신부(121) 중 적어도 하나를 포함할 수 있다.
근거리 통신 모듈은 블루투스 모듈, 적외선 통신 모듈, RFID(Radio Frequency Identification) 통신 모듈, WLAN(Wireless Local Access Network) 통신 모듈, NFC 통신 모듈, 지그비(Zigbee) 통신 모듈 등 근거리에서 무선 통신망을 이용하여 신호를 송수신하는 다양한 근거리 통신 모듈을 포함할 수 있다.
유선 통신부(122)는 캔(Controller Area Network; CAN) 통신 모듈, 지역 통신(Local Area Network; LAN) 모듈, 광역 통신(Wide Area Network; WAN) 모듈 또는 부가가치 통신(Value Added Network; VAN) 모듈 등 다양한 유선 통신부(122)뿐만 아니라, USB(Universal Serial Bus), HDMI(High Definition Multimedia Interface), DVI(Digital Visual Interface), RS-232(recommended standard232), 전력선 통신, 또는 POTS(plain old telephone service) 등 다양한 케이블 통신 모듈을 포함할 수 있다.
무선 통신부(121)는 라디오 데이터 시스템 교통 메시지 채널(Radio Data System-Traffic Message Channel, RDS-TMC), DMB(Digital Multimedia Broadcasting), 와이파이(Wifi) 모듈, 와이브로(Wireless broadband) 모듈 외에도, GSM(global System for Mobile Communication), CDMA(Code Division Multiple Access), WCDMA(Wideband Code Division Multiple Access), UMTS(universal mobile telecommunications system), TDMA(Time Division Multiple Access), LTE(Long Term Evolution) 등 다양한 무선 통신 방식을 지원하는 무선 통신부(121)를 포함할 수 있다.
무선 통신부(121)는 차량(100) 제어 신호를 수신하는 안테나 및 수신기(Receiver)를 포함하는 무선 통신 인터페이스를 포함할 수 있다. 또한, 무선 통신부(121)는 무선 통신 인터페이스를 통하여 수신한 아날로그 형태의 무선 신호를 디지털 제어 신호로 복조하기 위한 교통정보 신호 변환 모듈을 더 포함할 수 있다.
통신부(120)는 차량(100)의 방향 정보, 차량(100)의 가속 정보, 가 수집되면 수집된 데이터를 제어부(110)에 송신하거나, 제어부(110)로부터 타 차량(700)에 정보를 요청하는 제어 신호를 수신하여 타 차량(700)에 송신할 수 있다.
사용자 인터페이스(130)는 입력부(131)와 출력부(132)로 구성될 수 있다. 입력부(131)는 사용자로부터 위험영역(300) 및 안전영역(400) 표시에 관한 명령을 받아 제어부(110)에 전달할 수 있고, 출력부(132)는 사용자에게 경고 메시지나 위험영역(300) 및 안전영역(400) 표시 여부에 대한 알림을 표시할 수 있다.
사용자 인터페이스(130)는 AVN(Audio Video Navigation) 디스플레이를 포함할 수 있다. 그러나, 당해 실시예에서 사용자 명령을 받는 입력부(131)와 알림을 표시하는 출력부(132)가 반드시 AVN 디스플레이로 한정되는 것은 아니다.
사용자 인터페이스(130)는 AVN 디스플레이가 아니더라도 사용자가 명령을 입력할 수 있으면 입력부(131)가 될 수 있고, 표시된 내용을 확인할 수 있으면 경고메시지를 표시하는 출력부(132)가 될 수 있다.
예를 들어, 입력부(131)는 자동차용 음성인식 시스템(Automotive Voice Recognition System)이 될 수 있고 출력부(132)는 사운드를 출력하는 차량(100) 내부 스피커가 될 수 있다.
자동차용 음성인식 시스템은 사용자가 명령어를 음성으로 발화하는 경우 입력된 명령어를 분석하여 명령어에 상응하는 도메인을 판단하고 동작을 수행할 수 있다.
따라서, 입력부(131)가 자동차용 음성인식 시스템이 되면 사용자는 음성으로 차량(100)의 표시부(150)를 작동시키거나 작동 해제시킬 수 있다.
이 외에도 입력부(131)는, 차량(100)을 제어하기 위한 전장 시스템에 활용될 수 있으며 음성 인식을 통해 차량(100)의 공조 시스템을 제어하거나 내비게이션에 목적지를 입력할 수도 있다.
이 외에도 출력부(132)는, 차량(100)의 상태를 나타내는 정보를 표시하거나, 차량(100)의 설정을 가이드하기 위한 정보를 표시하거나, 내비게이션 화면을 표시하거나, 멀티미디어 컨텐츠를 표시하거나, 주행과 관련된 정보를 표시할 수도 있다.
카메라(140)는 차량(100) 내부에서 차량(100)의 주변을 촬영할 수 있는 위치에 적어도 하나 장착될 수 있다.
또는, 카메라(140)가 장착된 외부 단말(200)이 차량(100)과 연결되어 차량(100)의 주변을 촬영하는 카메라(140)의 기능을 수행하는 것도 가능하다. 외부 단말(200)과 차량(100)의 연결은 블루투스와 같은 무선 통신을 통해 이루어질 수도 있고, 유선 케이블을 통해 이루어질 수도 있다.
카메라(140)는 차량(100)에 장착된 빌트인 캠(DVRS, Drive Video Record System) 또는 내부에 별도로 장착되는 블랙박스일 수 있으나 이에 한정되지 않는다.
카메라(140)는 차량(100)의 주변을 촬영하여 차량(100) 주변 영상을 획득할 수 있는 이미지 장치에 해당하면 어떤 구성도 포함될 수 있다.
표시부(150)는 차량(100)의 주변에 빛을 조사하여 운전자 또는 외부 객체가 빛을 육안으로 감지할 수 있도록 하는 구성일 수 있다.
표시부(150)는 일 실시예에서 차량(100)의 사이드미러에 장착되는 퍼들램프를 포함할 수 있고, 퍼들램프는 차량(100) 사이드미러의 하부에 설치되어 도로면으로 빛을 조사하여 위험영역(300) 및 안전영역(400)을 구분하여 표시할 수 있다.
퍼들램프는 집광렌즈, 이미지 패턴, 프로젝션 렌즈를 하나의 몸체로 형성된 MLA(Micro Lens Array)를 포함하여 구성함으로써, 패키지의 크기를 축소시켜 차량(100)의 하부에 설치하기 유리하도록 구성할 수 있다.
제어부(110)는 퍼들램프의 기울기를 가변시켜 조사영역을 조절함으로써, 위험영역(300)의 변동에 따라 빛 조사 영역을 달리하는 역할을 하도록 할 수 있다.
일 실시예에 의한 차량(100)에서 퍼들램프의 기울기를 조절하는 구성은 액추에이터와 작동로드를 포함하여 구성할 수 있다.
제어부(110)는 작동로드를 길어지게 하면 퍼들램프가 하강하고, 노면과의 경사도가 완만하게 되어 조사영역이 길어지게 할 수 있다. 반대로 제어부(110)는 작동로드를 짧아지게 하면 퍼들램프가 상승하고, 노면과의 경사도를 크게 하여 조사영역이 짧아지게 할 수 있다.
이와 같이 표시부(150)가 퍼들램프로 구성될 경우, 실시예에 따라 조사 영역이 달라지도록 제어할 수 있다.
표시부(150)는 다른 실시예에서 차량(100)의 헤드램프가 포함될 수 있다.
차량(100)의 헤드램프는 차량(100)의 전방으로 빛을 조사하는 것으로 이를 통해 운전자의 전방시계를 넓은 범위로서 확보함에 따라 사고를 방지하는 안전장치 중 하나일 수 있다.
차량(100)의 헤드램프는 차량(100)의 전방시계를 확보할 뿐 아니라, 차량(100)용 픽셀라이트 헤드램프를 이용하여 자기 차량(100)의 전방쪽 지면에 콘텐츠를 표시할 수도 있다.
제어부(110)는 차량(100)의 이동영역에 대한 정보를 지면에 표시하여 외부 객체에 알릴 수 있고, 헤드램프의 조사영역을 조절함으로써, 위험영역(300)의 변동에 따라 빛 조사 영역을 달리하는 역할을 하도록 할 수 있다.
메모리(160)는 차량(100)에 구비된 카메라(140)에 의해 촬영된 차량(100) 주변의 영상을 프레임 단위로 저장하기 위해 사용될 수 있다. 또한 메모리(160)는, 외부 단말(200)에서 통신부(120)를 통해 수신된 제어 신호를 저장하기 위해 사용될 수도 있다.
메모리(160)는 S-램(Static Random Access Memory, S-RAM), D-램(Dynamic Random Access Memory, D-RAM) 등의 휘발성 메모리(160)와, 롬(Read Only Memory: ROM), 이피롬(Erasable Programmable Read Only Memory: EPROM) 등의 비휘발성 메모리(160)를 포함할 수 있다. 메모리(160)는 하나의 메모리(160) 소자를 포함하거나 또는 복수의 메모리(160) 소자들을 포함할 수 있다.
제어부(110)는 상기의 통신부(120), 사용자 인터페이스(130), 카메라(140), 표시부(150), 메모리(160)를 제어하여 도로면으로 빛을 조사하여 위험영역(300) 및 안전영역(400)을 구분하여 표시할 수 있다.
구체적으로 제어부(110)는 외부 단말(200)로부터 차량(100)의 이동에 관한 제어 신호를 입력받고, 카메라(140)로부터 획득한 영상데이터를 복수의 영상프레임으로 분석하여 이동 경로상 장애물이 존재하는지 여부를 판단할 수 있다.
제어부(110)가 장애물이 존재한다고 판단하면, 제어부(110)는 장애물이 존재하는 영역은 이동 영역에서 제외할 수 있다.
제어부(110)는 외부 단말(200)로부터 수신한 이동 신호에 기초하여 차량(100)의 이동영역을 결정할 수 있고, 이동영역을 위험영역(300)과 안전영역(400)으로 구분할 수 있다.
제어부(110)는 위험영역(300) 및 안전영역(400)이 결정되면, 표시부(150)를 제어하여 위험영역(300) 및 안전영역(400)에 빛을 조사할 수 있으며, 이에 따라 외부 객체는 차량(100)의 이동 영역을 육안으로 쉽게 식별할 수 있다.
또한 차량(100)의 운전자도 차량(100)의 다양한 거동에 의해 운전자 및 보행자(600)가 차량(100)의 이동영역을 예측하기 어려운 4륜 독립 조향시스템에서 차량(100)의 이동영역을 쉽게 예측할 수 있다.
그에 따라 보행자(600), 타 차량(700)과 같은 외부 객체와 운전자 모두가 차량(100)의 이동영역을 쉽게 예측할 수 있어, 차량(100)의 사고를 효과적으로 방지할 수 있다.
이하에서는 각 구성에 의해 차량(100)의 이동영역을 결정하고 위험영역(300)과 안전영역(400)으로 나누어 표시하는 방법에 대해 구체적으로 설명한다.
도2는 일 실시예에 의한 차량(100)에서 4륜 독립 구동을 위한 조향 구조를 설명한 도면이다.
도2를 참조하면, 차량(100)에는 차량(100)의 전방을 촬영하는 카메라(140)가 구비되어 있으며, 카메라(140)는 차량(100) 주변의 영상을 촬영하여 장애물 유무를 판단하기 위해 활용될 수 있다.
4륜 독립 구동을 위한 조향 구조를 갖춘 차량(100)은, 4개의 휠타이어(101-1, 101-2, 101-3, 101-4), 4개의 스티어링 액추에이터(102-1, 102-2, 102-3, 102-4), 4개의 스티어링 링키지(103-1, 103-2, 103-3, 103-4)를 포함할 수 있다.
4륜 독립 구동을 위한 차량(100)은 제어방식의 차이에 따라 액추에이터 등으로 리어 토를 바꾸는 능동형과 지오메트리를 통해 코너링시 횡압력에 의해 토가 변하는 수동형으로 구분할 수 있다.
일 실시예에 따른 차량(100)은 4개의 바퀴에 각각 스티어링 액추에이터(102-1, 102-2, 102-3, 102-4), 스티어링 링키지(103-1, 103-2, 103-3, 103-4)가 구비되어 있어 운전자가 직접 모든 바퀴의 조향을 제어할 수 잇는 능동형 제어일 수 있다.
각 스티어링 액추에이터(102-1, 102-2, 102-3, 102-4)는 스티어링 휠 조작에 의한 작동 에너지를 기계적인 변위로 변환하는 부품으로, 유압 액추에이터를 포함할 수 있다.
각 스티어링 링키지(103-1, 103-2, 103-3, 103-4)는 조향 연결 장치 자동차의 진행 방향을 바꾸는 장치의 하나로, 조향 기어의 운동을 바퀴로 전달하는 구성일 수 있다. 각 스티어링 링키지(103-1, 103-2, 103-3, 103-4)는 일체 차축식 현가장치에 사용되고 있는 크로스 링크식, 독립 현가장치에 사용되는 대칭 링크식, 래크와 피니언 링크식 및 센터 암식 등으로 분류될 수 있다.
이때, 일 실시예에 따른 차량(100)은 4륜 모두에 스티어링 링키지(103-1, 103-2, 103-3, 103-4)가 구비되어 있으므로, 각각 의 조향 기어의 운동을 바퀴로 전달할 수 있어서 회전반경을 줄어들고, 제자리에서 돌거나 대각선으로 움직이는 크랩워크도 가능하다.
상기 차량(100)은 4륜 독립 조향이 가능한 차량(100)이면 그 구성에 제한이 없고, 차량(100)의 이동영역을 위험영역(300)과 안전영역(400)으로 구분하여 표시하는 일 실시예에 의한 차량(100)이 될 수 있다.
도3은 일 실시예에 의한 차량(100)에서 노면 단차 보정을 위한 차량(100)의 구조를 나타낸 도면이다.
도3을 참조하면, 차량(100)의 차고를 조절하는 휠 높이 액추에이터(104-1)가 도시되어 있다.
휠 높이 액추에이터(104-1)는 모든 바퀴에 구비되어 있으며, 차량(100)이 오프로드(off road)를 달릴 때 지면으로부터의 높이를 증가시키고 차량(100)이 온로드(on road)를 달릴 때 지면으로부터의 높이를 감소시키기 위해 사용할 수 있다.
휠 높이 액추에이터(104-1)는 특히, 오프로드와 같이 지면의 높이가 불규칙한 지면에서 차량(100)의 수평을 유지하고, 회전력을 온전히 전달하기 위해 사용될 수 있다.
휠 높이 액추에이터(104-1)는 기계식과 전자식으로 나뉠 수 있으며, 휠 높이를 조절할 수 있는 구성이면 그 제한이 없다.
제어부(110)는 휠 높이 액추에이터(104-1)를 제어하여 노면이 고르지 않은 곳에서도 차량(100)의 수평을 유지할 수 있고, 그에 따라 차량(100)의 이동영역을 결정할 때 노면 상태에 대한 영향을 최소화 할 수 있다.
구체적으로, 제어부(110)는 차량(100)의 모든 휠의 휠 단차를 계산할 수 있으며, 그에 따라 휠 단차가 최소가 되는 방향으로 휠 높이 액추에이터(104-1)를 제어할 수 있다.
이때, 제어부(110)는 차량(100) 자이로 센서로 수평을 판단할 수 있고, 자이로 센서는 자이로스코프가 내재된 물체가 회전운동을 하면 생기는 회전 반발력을 측정하여 전기신호로 바꾸어 수평을 측정할 수 있다.
이에 따라 일 실시예에 의한 차량(100)은 차량(100)이 수평인 상태에서의 횡 가속도를 측정할 수 있고, 노면의 영향을 최소화 하면서 위험영역(300) 및 안전영역(400)을 표시할 수 있다.
도4는 일 실시예에 의한 차량(100)에서 퍼들 램프를 이용하여 이동방향을 예측하고 이동영역을 표시하는 것을 나타낸 도면이다.
도4이하에서는 표시부(150)를 사이드미러에 구비된 퍼들램프로 설명하였으나, 이에 제한되지 않고, 헤드램프와 같이 차량(100)의 외부로 빛을 조사할 수 있는 모든 구성이 포함될 수 있다.
도4를 참조하면, 제어부(110)는 차량(100)의 사이드미러 하단에 구비된 표시부(150)가 지면 방향으로 빛을 조사하도록 제어할 수 있다.
제어부(110)는 구동 토크 및 상기 차량(100)의 제원으로 선회 중심점 및 이동 반경을 계산할 수 있으며, 이동반경을 왼쪽 표시 영역(151-1)과 오른쪽 표시 영역(151-2)으로 구분할 수 있다.
제어부(110)는 차량(100)의 구동 토크에 비례하고 차량(100)의 무게에 반비례하는 크기로 이동반경을 계산할 수 있으며, 그에 대응하여 표시 영역(151-1, 151-2)의 크기를 정할 수 있다.
또한 제어부(110)는 차량(100)의 이동방향을 계산하고 이동방향을 화살표와 같이 외부 객체가 인식할 수 있는 방법으로 표시할 수 있다.
제어부(110)가 이동영역을 노면에 표시하는 것 만으로도 차량(100)의 외부 객체인 보행자(600)나 타 차량(700)이 육안으로 쉽게 상기 차량(100)의 이동영역을 쉽게 확인할 수 있으므로 사고를 미연에 방지하고 운전자의 운전 편의를 도모할 수 있다.
제어부(110)는 표시부(150)가 퍼들램프인 경우, 퍼들램프의 기울기를 가변시켜 조사영역을 조절함으로써, 표시 영역(151-1, 151-2)의 크기나 표시 영역(151-1, 151-2)의 위치를 변경시킬 수 있다.
또한, 표시부(150)가 헤드램프인 경우, 헤드램프의 조사영역을 조절함으로써 표시 영역(151-1, 151-2)의 크기나 표시 영역(151-1, 151-2)의 위치를 변경시킬 수 있다.
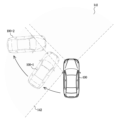
도5는 일 실시예에 의한 차량(100)에서 차량(100)의 이동과 차량(100) 카메라(140)에 의한 장애물 인식 영역을 나타낸 도면이다.
도5를 참조하면, 일 실시예에 의한 차량(100)은 4륜 독립 조향이 가능한 차량(100)이므로 도5에서와 같이 후륜 바퀴의 각도를 발생시킬 수 있어서 미끌어지듯 이동이 가능하다.
이 경우, 제어부(110)는 차량(100)에 구비된 적어도 하나의 카메라(140)를 통해 전방 또는 측후방에 위치하는 장애물을 감지할 수 있다.
도5에서의 카메라(140)는 차량(100)의 전방 영역을 촬영하는 전방 카메라(140)와 측면을 촬영하는 측면 카메라(140)로 구성되어 있으며, 각 카메라(140)는 장애물의 감지하기 위한 별도의 카메라(140)이거나 차량(100)에 구비된 서라운드 뷰 카메라 또는 전방카메라(140) 일 수 있다.
차량(100)은 전면 감지 영역(141)과 장축이 일치된 상태에서 정차하고 있으며, 이후 차량(100-1)은 화살표 방향에 따라 뒷바퀴 조향으로 왼쪽면으로 이동할 수 있다.
이후 차량(100-2)은 이동을 계속하여 왼쪽면으로 90도 가량 이동하는 이동경로를 가질 수 있다. 이 때, 제어부(110)는 차량(100)의 이동경로 상에 보행자(600)나 타 차량(700) 등의 장애물이 존재하는 경우, 측면 감지 영역(142)을 촬영하는 카메라(140)를 통해 장애물을 감지할 수 있다.
제어부(110)는 장애물이 감지되면 감지된 장애물을 회피하는 경로로 이동경로를 결정할 수 있다. 그에 따라 제어부(110)는 장애물을 회피하는 경로로 표시부(151-1, 151-2)를 제어하여 이동영역을 표시할 수 있다.
이하에서는 이동영역을 고려하여 위험영역(300)과 안전영역(400)으로 구분하여 표시하는 방법에 대하여 기술한다.
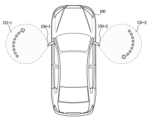
도6은 일 실시예에 의한 차량(100)에서 위험영역(300)과 안전영역(400)을 구분하여 표현한 도면이다.
도6을 참조하면, 제어부(110)는 차량(100)의 일면을 위험영역(300)으로 표시하고 다른면은 안전영역(400)으로 표시할 수 있다.
제어부(110)는 차량(100)의 이동경로 방향의 표시부(150)가 위험영역(300)을 표시하도록 제어하고, 이동경로 방향과 반대 방향의 표시부(150)가 안전영역(400)을 표시하도록 제어할 수 있다.
이때 제어부(110)는 위험영역(300)과 안전영역(400)을 구분할 수 있도록 위험영역(300)과 안전영역(400)을 빛의 조사색상 또는 조사강도로 구분할 수 있다.
제어부(110)가 위험영역(300)과 안전영역(400)을 구분하여 외부 객체인 보행자(600), 타 차량(700)이 육안으로 쉽게 확인할 수 있게 되면, 외부 객체가 차량(100)의 이동 방향을 쉽게 확인할 수 있고 이에 따라 사고의 위험을 현저하게 감소시킬 수 있다.
또한, 위험영역(300)과 근접한 보행자(600) 또는 타 차량(700)은 안전영역(400) 방향으로 진로를 변경하게 되고, 그에 따라 운전자의 다른 지시가 없더라도 보행자(600) 및 타 차량(700)과의 통행이 원활해지는 효과가 있다.
도6에서 4륜 독립 조향이 불가능한 차량(100)의 진행방향인 빗금친 영역은 보행자(600) 또는 타 차량(700)이 그 진행방향을 쉽게 예측할 수 있으나, 표시부(150)를 복수개 활용하여 전면 또는 후면에 추가적으로 위험영역(300)을 표시할 수도 있다.
도7은 일 실시예에 의한 차량(100)에서 위험영역(300)과 안전영역(400)을 구분하고, 위험영역(300)을 세분화한 도면이다.
도7(a)를 참조하면, 제어부(110)는 위험영역(300)을 제1영역(301)과 제2영역(302)으로 구분하여 표시할 수 있다.
이때 제어부(110)는 제1영역(301)과 제2영역(302)을 빛의 조사색상 또는 조사강도로 구분하여 표시할 수 있고, 제1영역(301)과 제2영역(302)이 구분될 수만 있으면 그 방법에는 제한이 없다.
제어부(110)는 제1영역(301)을 차량(100)의 횡가속도에 따라 영역 크기 및 모양이 증감될 수 있는 영역으로 설정할 수 있고, 제2영역(302)을 차량 전장 길이(500)에 기반한 고정된 영역으로 설정할 수 있다.
도7(b)를 함께 참조하면, 제2영역(302)은 차량 전장 길이(500)를 지름으로 하는 반원으로 설정될 수 있다. 제2영역(302)은 차량(100)의 전장길이를 지름으로 하므로 차량(100)의 선회 또는 이동에서 차량(100)과의 충돌을 피하기 위한 최소한의 안전거리일 수 있다.
따라서, 제어부(110)는 위험영역(300)에서 최소한의 안전거리에 해당하는 제2영역(302)을 짙은 조사색상 및 강한 조사강도로 표현하고, 제1영역(301)을 상대적으로 옅은 조사색상 및 약한 조사강도로 대비되도록 표현할 수 있다.
이에 따라 외부 객체는 제2영역(302)이 사고의 가능성이 높은 영역이고 제1영역(301)은 사고의 가능성이 낮지만 주의해야 할 영역이라고 인지하여 해당 영역을 회피할 수 있다.
도8은 일 실시예에 의한 차량(100)에서 횡 가속도와 빛 조사 영역의 관계를 나타낸 도면이다.
제어부(110)는 차량(100)의 횡가속도를 차량(100)의 출발 토크 값과 상기 차량(100)의 제원으로 계산하여 이동영역을 결정하고, 도7에서 설명한 바와 같이 위험영역(300)과 안전영역(400)으로 구분하여 표시할 수 있다.
도8(a)의 표 및 도8(b)의 그래프를 참조하면, 횡가속도가 0.3일 때 빛 조사 영역에 해당하는 위험영역(300)의 반원 지름은 0.8이고, 횡가속도가 0.6일 때 빛 조사 영역은 1.6이며, 횡가속도가 1일 때 빛 조사 영역은 2.5일 수 있다.
위의 수치는 예시적인 것이며, 제어부(110)는 횡가속도가 증가함에 따라 빛 조사 영역을 비례적으로 증가시킬 수 있다.
차량(100)의 횡가속도가 증가한다는 것은 차량(100)이 좌우방향으로 이동하는 속도가 빠르게 증가한다는 것을 의미하므로, 차량(100) 정지 단계에서 수신된 차량(100)의 이동신호에 기초한 위험영역(300)으로는 외부 객체를 충분히 보호할 수 없다.
구체적으로, 차량(100)의 횡가속도가 증가되면 차량(100)의 이동영역 상에 있는 외부 객체로의 도달 시간이 짧아짐을 의마한다. 따라서 횡가속도 증가 전에 위험영역(300) 밖에 인접해 있던 외부객체도 차량(100)의 이동에 의해 사고가 발생할 수 있으므로 위험영역(300)을 증가시킬 필요가 있다.
따라서 제어부(110)는, 차량(100)의 토크 및 차량(100)의 제원에 의해 계산된 횡가속도가 증가하면 차량(100)의 위험영역(300)에 해당하는 빛 조사 영역의 크기를 증가시키고, 횡가속도가 감소하면 차량(100)의 위험영역(300)에 해당하는 빛 조사 영역의 크기를 감소시킬 수 있다.
그에 따라 일 실시예에 의한 차량(100)은 차량(100)의 속도 증감에도 차량(100) 이동에 의한 위험영역(300) 표시의 신뢰성을 확보할 수 있다.
도9는 일 실시예에 의한 차량(100)에서 빛 조사 영역의 실시간 변화를 나타낸 도면이다.
도9(a)를 참조하면, 제어부(110)는 차량(100-1)이 정지상태에 있거나 횡가속도의 변화가 없다고 판단된 경우 위험영역(300-1)과 안전영역(400-1)의 크기가 동일하게 표시할 수 있다.
도9(b)를 참조하면, 차량(100-2)은 이동신호에 의해 도면 기준 오른쪽으로 진행하고 있어서 위험영역(300-2)의 크기가 안전영역(400-2)보다 큰 크게 표시된 것을 확인할 수 있다.
제어부(110)는 차량(100-2)이 오른쪽으로 이동하며, 횡가속도가 증가하는 경우이므로 상대적으로 안전영역(400-2) 부근에 위치한 외부 객체들은 빠르게 멀어지게 되어 안전영역(400-2)을 크게 표시할 필요가 없으므로 안전영역(400-2)의 크기를 작게 표시할수 있다.
반면에 제어부(110)는 차량(100-2)이 오른쪽으로 진행하므로 위험영역(300-2)의 크기를 증가시켜 횡가속도가 증가하기 이전보다 차량(100-2)이 빠르게 위험영역(300-2)으로 도달할 수 있음을 외부 객체에 알릴 수 있다.
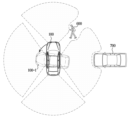
도10은 일 실시예에 의한 차량(100)이 제자리 선회하는 실시예를 나타낸 도면이다.
도10을 참조하면, 일 실시예에 의한 차량(100)은 4륜 독립 조향이 가능한 차량(100)이므로. 후륜 조향 제어에 의해 제자리 선회가 가능하다.
차량(100)이 제자리 선회를 하는 경우에도 외부 객체인 보행자(600) 또는 타 차량(700)과의 충돌이 가능하므로, 제어부(110)는 위험영역(300)과 안전영역(400)을 구분하여 표시할 필요가 있다.
제어부(110)는 위험영역(300)과 안전영역(400)을 구분하여 표시하기 위해 카메라(140)로부터 획득한 영상데이터를 복수의 영상프레임으로 분석하여 이동 경로상 장애물이 존재하는지 여부를 판단할 수 있다.
구체적으로, 차량(100)은 전면 감지 영역(141)과 장축이 일치된 상태에서 정차하고 있으며, 이후 차량(100)은 화살표 방향에 따라 뒷바퀴 조향으로 제자리 선회할 수 있다.
이후 차량(100-1)은 선회를 계속하여 왼쪽으로 90도 가량 회전하는 이동경로를 가질 수 있다. 이 때, 제어부(110)는 차량(100-1)의 이동경로 상에 보행자(600)나 타 차량(700) 등의 장애물이 존재하는 경우, 측면 감지 영역(142)을 촬영하는 카메라(140)를 통해 장애물을 감지할 수 있다.
제어부(110)는 장애물이 감지되면 감지된 장애물을 회피하는 경로로 이동경로를 결정할 수 있다. 그에 따라 제어부(110)는 장애물을 회피하는 경로로 표시부(150)를 제어하여 이동영역을 표시할 수 있다.
제어부(110)는 제자리 선회의 경우 일측면의 표시부(150)를 분할하여 회전 방향의 앞쪽 영역은 안전영역(400)으로 결정하고, 뒤쪽 영역을 위험영역(300)으로 결정할 수 있다.
구체적으로, 차량(100)을 차량(100)의 보닛을 포함하는 전면부와 트렁크를 포함하는 후면부로 나누었을때, 반시계 방향으로 회전하면 차량(100)의 왼쪽면에 위치한 외부 객체는 차량(100)의 전면부와 충돌할 위험성이 있다.
따라서, 제어부(110)는 차량(100)의 전면부와의 충돌을 방지하기 위해 차량(100)의 전면부와 가까운 영역을 위험영역(300)으로 판단하고, 차량(100)의 후면부와 가까운 영역을 안전영역(400)으로 판단할 수 있다.
그에 따라 제어부(110)는 반시계 방향으로 회전하는 차량(100)에서 왼쪽면의 표시부(150)는 차량(100)의 전면부와 가까운 영역을 위험영역(300)으로 표시하고, 오른쪽면의 표시부(150)는 차량(100)의 후면부와 가까운 영역을 위험영역(300)으로 표시할 수 있다.
도11은 일 실시예에 의한 차량(100)에서 노면 단차를 보정하는 과정에 대해 설명하는 도면이다.
도11을 참조하면, 도3에서 설명한 휠 높이 액추에이터(104-1)에 의해 차량(100)의 수평이 유지되는 것을 확인할 수 있다.
제어부(110)는 차량(100)의 모든 휠의 휠 단차를 계산할 수 있으며, 그에 따라 휠 단차가 최소가 되는 방향으로 휠 높이 액추에이터(104-1)를 제어할 수 있다.
이에 따라 일 실시예에 의한 차량(100)은 차량(100)이 수평인 상태에서의 횡 가속도를 측정할 수 있고, 노면의 영향을 최소화 하면서 위험영역(300) 및 안전영역(400)을 표시할 수 있다.
도11에 의한 차량(100)은 차량(100)의 일측면의 휠타이어(101-1)가 타측면의 휠타이어(101-1) 보다 높은 지대에 위치하고 있음을 확인할 수 있다.
제어부(110)는 각 휠타이어(101-1)가 다른 높이의 노면에 위치하더라도 휠 높이 액추에이터(104-1)를 제어하여 수평을 확보할 수 있으므로 횡가속도를 계산하여 스티어링 액추에이터(102-1), 스티어링 링키지(103-1)를 제어할 때에 오차 없이 이동영역을 결정할 수 있다.
구체적으로, 제어부(110)가 각 휠타이어(101-1)의 높이가 보정되지 않은 상태에서 횡가속도를 계산하게 되면, 평지에서의 출력 토크에 비해 횡가속도가 낮거나 높게 측정될 수 있다.
제어부(110)가 차량(100)의 출력 토크에 비해 횡가속도를 낮거나 높게 측정하여 오차를 발생시킬 경우, 표시되어야 할 위험영역(300)의 크기보다 크거나 작은 영역이 표시될 수 있다.
따라서, 제어부(110)는 위와 같은 오차를 방지하기 위해, 휠 높이 액추에이터(104-1)를 제어하여 차량(100)의 수평을 확보한 이후 위험영역(300) 및 안전영역(400)을 표시하도록 제어할 수 있다.
도12는 일 실시예에 의한 차량(100)의 제어 흐름도를 나타낸 도면이다.
도12를 참조하면, 일 실시예에 의한 차량(100)의 제어부(110)는 차량(100)에 구비된 적어도 하나의 카메라(140)를 통해 차량(100) 주변의 장애물을 인식할 수 있다(1200). 이때 차량(100)의 주변은 전면에 한정되지 않으며, 사면을 전부 포함할 수 있다.
제어부(110)는 수신된 이동신호에 기초한 이동영역에 장애물이 존재하는 것으로 판단되면 장애물을 회피하여 기동할 수 있는 회피 가능 경로를 산출할 수 있다(1210).
이후 제어부(110)는 차량(100)의 출발 토크 값과 차량(100)의 제원으로 이동영역 및 이동 횡가속도를 판단할 수 있다(1220). 이때, 이동영역은 선회영역을 포함하고, 이동 횡가속도는 선회 횡가속도를 포함한다.
제어부(110)는 횡가속도가 증가하면, 비례적으로 위험영역(300)의 빛 조사 영역의 크기를 증가시킬 수 있다(1240). 반대로 제어부(110)는 횡가속도가 감소하면, 비례적으로 위험영역(300)의 빛 조사 영역의 크기를 감소시킬 수도 있다.
제어부(110)는 위험영역(300) 및 안전영역(400)의 크기가 결정되면, 이동영역을 위험영역(300)과 안전영역(400)으로 나누어 표시할 수 있다(1250).
차량(100)의 제어 방법에 관한 구체적인 실시예는 상기의 차량(100)에 관한 실시예와 중복되므로 설명을 생략한다.
이상에서와 같이 첨부된 도면을 참조하여 개시된 실시예들을 설명하였다. 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자는 본 발명의 기술적 사상이나 필수적인 특징을 변경하지 않고도, 개시된 실시예들과 다른 형태로 본 발명이 실시될 수 있음을 이해할 것이다. 개시된 실시예들은 예시적인 것이며, 한정적으로 해석되어서는 안 된다.
100, 100-1, 100-2 : 차량,
101-1 , 101-2, 101-3, 101-4 : 휠타이어,
102-1 , 102-2, 102-3, 102-4 : 스티어링 액추에이터,
103-1 , 103-2, 103-3, 103-4 : 스티어링 링키지,
104-1 : 휠 높이 액추에이터
110 : 제어부
120 : 통신부, 121 : 무선 통신부, 122 : 유선 통신부
130 : 사용자 인터페이스, 131 : 입력부, 132 : 출력부
140 : 카메라. 141 : 전면 감지 영역, 142 : 측면 감지 영역
150 : 표시부. 151 : 표시 영역
160 : 메모리
200 : 외부 단말
300, 300-1, 300-2 : 위험영역 , 301 : 제1영역, 302 : 제2영역
400, 400-1, 400-2 : 안전영역
500 : 차량 전장 길이
600 : 보행자
700 : 타 차량
101-1 , 101-2, 101-3, 101-4 : 휠타이어,
102-1 , 102-2, 102-3, 102-4 : 스티어링 액추에이터,
103-1 , 103-2, 103-3, 103-4 : 스티어링 링키지,
104-1 : 휠 높이 액추에이터
110 : 제어부
120 : 통신부, 121 : 무선 통신부, 122 : 유선 통신부
130 : 사용자 인터페이스, 131 : 입력부, 132 : 출력부
140 : 카메라. 141 : 전면 감지 영역, 142 : 측면 감지 영역
150 : 표시부. 151 : 표시 영역
160 : 메모리
200 : 외부 단말
300, 300-1, 300-2 : 위험영역 , 301 : 제1영역, 302 : 제2영역
400, 400-1, 400-2 : 안전영역
500 : 차량 전장 길이
600 : 보행자
700 : 타 차량
Claims (18)
- 지면으로 빛을 조사하는 표시부;
외부 단말과의 통신으로 차량의 이동신호를 수신하는 통신부;
수신된 상기 차량의 이동신호에 기초하여 상기 차량의 이동영역을 결정하고, 상기 이동영역에 포함된 위험영역 및 안전영역을 결정하고, 상기 위험영역 및 상기 안전영역에 빛을 조사하도록 표시부를 제어하는 제어부;를 포함하는 차량. - 제1항에 있어서,
상기 제어부는,
상기 차량과 상기 외부 단말에 구비된 적어도 하나의 카메라로 상기 차량 주변의 장애물을 검출하여 상기 장애물을 회피하는 경로로 상기 이동영역을 결정하는 차량. - 제1항에 있어서,
상기 차량의 횡가속도에 따라 빛 조사 영역을 달리하고, 상기 횡가속도는 상기 차량의 출발 토크 값 및 상기 차량의 제원으로 계산되는 차량. - 제1항에 있어서,
상기 제어부는,
상기 차량의 구동 토크 및 상기 차량의 제원으로 선회 중심점 및 이동 반경을 계산하여 상기 이동영역을 결정하는 차량. - 제1항에 있어서,
상기 제어부는,
상기 위험영역과 상기 안전영역을 빛의 조사색상 및 조사강도로 구분하여 이동영역을 알리는 차량. - 제1항에 있어서,
상기 제어부는,
상기 위험영역을 상기 차량의 전장거리를 지름으로 하는 반원에 해당하는 제1영역과, 나머지 부분에 해당하는 제2영역으로 나누고,
상기 제2영역은 상기 차량의 출발 토크 값과 상기 차량의 제원으로 계산된 횡가속도에 따라 빛 조사 영역을 달리하는 차량. - 제6항에 있어서,
상기 제어부는,
상기 횡가속도가 증가하는 것에 기초하여 상기 빛 조사 영역의 반원 지름을 증가시키는 차량. - 제1항에 있어서,
상기 제어부는,
상기 차량의 스티어링 휠 조작이나 턴 시그널의 방향에 기초하여 상기 이동영역을 결정하는 차량. - 제1항에 있어서,
상기 제어부는,
상기 차량의 휠 단차 센서로 노면의 단차를 계산하여 수평 보정 후에 상기 차량과 상기 외부 단말에 구비된 적어도 하나의 카메라로 상기 차량 주변의 장애물을 검출하여 상기 이동영역을 결정하는 차량. - 지면으로 빛을 조사하는 단계;
외부 단말과의 통신으로 차량의 이동신호를 수신하는 단계;
수신된 상기 차량의 이동신호에 기초하여 상기 차량의 이동영역을 결정하는 단계;
상기 이동영역에 포함된 위험영역 및 안전영역을 결정하는 단계;
상기 위험영역 및 상기 안전영역에 빛을 조사하는 단계;를 포함하는 차량의 제어 방법. - 제10항에 있어서,
상기 차량의 이동영역을 결정하는 단계는,
상기 차량과 상기 외부 단말에 구비된 적어도 하나의 카메라로 상기 차량 주변의 장애물을 검출하여 상기 이동영역을 결정하는 차량의 제어 방법. - 제10항에 있어서,
상기 차량의 출발 토크 값과 상기 차량의 제원으로 계산된 횡가속도에 따라 빛 조사 영역을 달리하는 단계;
를 더 포함하는 차량의 제어 방법. - 제10항에 있어서,
상기 차량의 이동영역을 결정하는 단계는,
상기 차량의 구동 토크 및 상기 차량의 제원으로 선회 중심점 및 이동 반경을 계산하여 상기 이동영역을 결정하는 차량의 제어 방법. - 제10항에 있어서,
상기 위험영역 및 상기 안전영역에 빛을 조사하는 단계는,
상기 위험영역과 상기 안전영역을 빛의 조사색상 및 조사강도로 구분하여 이동영역을 알리는 차량의 제어 방법. - 제10항에 있어서,
상기 위험영역 및 상기 안전영역에 빛을 조사하는 단계는,
상기 위험영역을 상기 차량의 전장거리를 지름으로 하는 반원에 해당하는 제1영역과, 나머지 부분에 해당하는 제2영역으로 나누고,
상기 제2영역은 상기 차량의 출발 토크 값과 상기 차량의 제원으로 계산된 횡가속도에 따라 빛 조사 영역을 달리하는 차량의 제어 방법. - 제15항에 있어서,
상기 빛 조사 영역을 달리하는 단계는;
상기 횡가속도가 증가하는 것에 기초하여 상기 빛 조사 영역의 반원 지름을 증가시키는 차량의 제어 방법. - 제10항에 있어서,
상기 위험영역 및 상기 안전영역에 빛을 조사하는 단계는,
상기 차량의 스티어링 휠 조작이나 턴 시그널의 방향에 기초하여 빛을 조사하는 차량의 제어 방법. - 제10항에 있어서,
상기 차량의 이동영역을 결정하는 단계는.
상기 차량의 휠 단차 센서로 노면의 단차를 계산하여 상기 차량의 수평 보정 후에 상기 차량 주변의 장애물을 검출하여 상기 이동영역을 결정하는 차량의 제어 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210164790A KR20230077479A (ko) | 2021-11-25 | 2021-11-25 | 차량 및 차량의 제어방법 |
| US17/942,375 US12291143B2 (en) | 2021-11-25 | 2022-09-12 | Vehicle and method of controlling the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210164790A KR20230077479A (ko) | 2021-11-25 | 2021-11-25 | 차량 및 차량의 제어방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20230077479A true KR20230077479A (ko) | 2023-06-01 |
Family
ID=86385086
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210164790A Pending KR20230077479A (ko) | 2021-11-25 | 2021-11-25 | 차량 및 차량의 제어방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US12291143B2 (ko) |
| KR (1) | KR20230077479A (ko) |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3083334A1 (en) * | 2013-12-16 | 2016-10-26 | Blindspotit IVS | Dynamic warning system |
| ES2561133B1 (es) * | 2014-07-24 | 2016-12-01 | Alejandro Rodriguez Barros | Retrovisor exterior multifunción con dispositivo emisor laser incorporado |
| DE102014011915A1 (de) * | 2014-08-12 | 2016-02-18 | Man Truck & Bus Ag | Verfahren zur Warnung von Verkehrsteilnehmern vor möglichen Gefahrenbereichen, die durch ein Fahrzeug entstehen, das ein Fahrmanöver ausführt oder ausführen will |
| JP6738613B2 (ja) * | 2016-02-10 | 2020-08-12 | 株式会社小糸製作所 | 車両用表示システム |
| WO2018038654A1 (en) * | 2016-08-24 | 2018-03-01 | Volvo Construction Equipment Ab | A warning system for a working machine |
| US10988078B2 (en) * | 2016-11-18 | 2021-04-27 | Panasonic Intellectual Property Management Co., Ltd. | Notifying device and notifying system |
| KR102690404B1 (ko) * | 2016-12-20 | 2024-08-01 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| JP6425050B1 (ja) * | 2017-06-14 | 2018-11-21 | マツダ株式会社 | 駆動力制御方法 |
| DE102017223431B4 (de) * | 2017-12-20 | 2022-12-29 | Audi Ag | Verfahren zum Assistieren eines Fahrers eines Kraftfahrzeugs bei einem Überholvorgang; Kraftfahrzeug; sowie System |
| US10676022B2 (en) * | 2017-12-27 | 2020-06-09 | X Development Llc | Visually indicating vehicle caution regions |
| JP6987170B2 (ja) * | 2020-03-31 | 2021-12-22 | ヤマハ発動機株式会社 | 光照射装置 |
| TWI780520B (zh) * | 2020-11-19 | 2022-10-11 | 景雅琦 | 車輛轉彎多燈光投射警示裝置 |
-
2021
- 2021-11-25 KR KR1020210164790A patent/KR20230077479A/ko active Pending
-
2022
- 2022-09-12 US US17/942,375 patent/US12291143B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20230158944A1 (en) | 2023-05-25 |
| US12291143B2 (en) | 2025-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11702076B2 (en) | Cargo trailer sensor assembly | |
| KR102366659B1 (ko) | 자율-주행 차량의 이미지 캡처 디바이스가 마주치는 광의 정도를 제어하기 위한 방법들 및 시스템들 | |
| EP3324556B1 (en) | Visual communication system for autonomous driving vehicles (adv) | |
| KR102485354B1 (ko) | 차량의 차로 변경 제어 장치, 그를 포함한 시스템 및 그 방법 | |
| US10611383B2 (en) | Driver assistance apparatus for vehicle | |
| KR102201290B1 (ko) | 차량용 디스플레이 장치 및 차량 | |
| US10919528B2 (en) | Vehicle driving assistance device and vehicle | |
| KR101916993B1 (ko) | 차량용 디스플레이 장치 및 그 제어방법 | |
| EP3190005B1 (en) | Lamp for vehicle, and vehicle including the same | |
| US20180015878A1 (en) | Audible Notification Systems and Methods for Autonomous Vehhicles | |
| US20180056996A1 (en) | Driver assistance apparatus and vehicle | |
| US20130311075A1 (en) | Motorcycle and helmet providing advance driver assistance | |
| KR102807503B1 (ko) | 차량 및 그 제어방법 | |
| US11557234B1 (en) | Windshield zone dimming and augmented reality head up display | |
| KR20170083209A (ko) | 조향 장치 및 차량 | |
| KR20210152602A (ko) | 운전자 보조 장치 및 운전자 보조 방법 | |
| KR20190061395A (ko) | 무선통신을 이용한 신호등 변화 알림 장치 및 방법 | |
| EP4207102A1 (en) | Electronic device, method, and computer readable storage medium for obtaining location information of at least one subject by using plurality of cameras | |
| KR102227371B1 (ko) | 차량용 영상투사장치 및 이를 구비한 차량 | |
| KR102674597B1 (ko) | 차량 및 그 제어방법 | |
| US20210158185A1 (en) | Vehicle recommendation system and method | |
| KR20230077479A (ko) | 차량 및 차량의 제어방법 | |
| KR102913563B1 (ko) | 서버 및 그 제어 방법 | |
| KR20230020030A (ko) | 운전자 보조 장치 및 그를 가지는 차량 | |
| US12397701B2 (en) | Lighting apparatus for vehicle and control method of the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13 | Search requested |
Free format text: ST27 STATUS EVENT CODE: A-1-2-D10-D13-SRH-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |