KR20240020004A - 차량 제어 장치 및 방법 - Google Patents
차량 제어 장치 및 방법 Download PDFInfo
- Publication number
- KR20240020004A KR20240020004A KR1020220097914A KR20220097914A KR20240020004A KR 20240020004 A KR20240020004 A KR 20240020004A KR 1020220097914 A KR1020220097914 A KR 1020220097914A KR 20220097914 A KR20220097914 A KR 20220097914A KR 20240020004 A KR20240020004 A KR 20240020004A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- torque
- determination unit
- power source
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/038—Limiting the input power, torque or speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/50—Control strategies for responding to system failures, e.g. for fault diagnosis, failsafe operation or limp mode
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0953—Predicting travel path or likelihood of collision the prediction being responsive to vehicle dynamic parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/188—Controlling power parameters of the driveline, e.g. determining the required power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/076—Slope angle of the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0098—Details of control systems ensuring comfort, safety or stability not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/029—Adapting to failures or work around with other constraints, e.g. circumvention by avoiding use of failed parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/035—Bringing the control units into a predefined state, e.g. giving priority to particular actuators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
- B60W2050/021—Means for detecting failure or malfunction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
- B60W2050/022—Actuator failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/029—Adapting to failures or work around with other constraints, e.g. circumvention by avoiding use of failed parts
- B60W2050/0297—Control Giving priority to different actuators or systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0657—Engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/083—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/15—Road slope, i.e. the inclination of a road segment in the longitudinal direction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/60—Traffic rules, e.g. speed limits or right of way
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2306/00—Other features of vehicle sub-units
- B60Y2306/15—Failure diagnostics
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mathematical Physics (AREA)
- Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Description
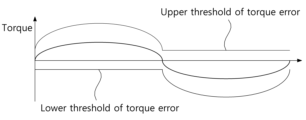
도 2는 토크 고장 판별을 위한 토크 범위를 보여주는 도면이다.
도 3은 차량 안전 제어를 위한 각종 토크 값을 보여주는 도면이다.
도 4는 본 발명의 바람직한 실시예에 따른 차량 제어 방법의 순서도이다.
110: 차량 상태 판단부
120: 주행 조건 판단부
130: 차량 제어부
Claims (12)
- 차량의 토크 이상 감지시, 상기 차량의 횡방향 및 종방향 주행 제어 상태를 판단하고, 상기 횡방향 주행 제어의 정상 상태이고, 상기 종방향 주행 제어의 고장 상태인 경우, 상기 차량의 복수의 동력원 중에서 정상 동력원을 판단하는 차량 상태 판단부;
상기 정상 동력원이 있는 경우, 차량 정보를 이용하여 사고 위험 주행 조건을 판단하는 주행 조건 판단부; 및
상기 사고 위험 주행 조건을 만족하는 경우, 타겟 안전 토크를 이용하여 차량 주행을 제어하는 차량 제어부;
를 포함하는 차량 제어 장치. - 제 1 항에 있어서,
상기 차량 상태 판단부는,
사용자의 요구 토크와 상기 차량의 토크를 이용하여 정상 토크 여부를 판단하고, 상기 차량의 토크 이상 감지시, 상기 종방향 주행 제어 및 횡방향 주행 제어와 관련한 제어기로부터 현재 상태 신호를 전달받는 것을 특징으로 하는 차량 제어 장치. - 제 2 항에 있어서,
상기 차량 상태 판단부는,
상기 현재 상태 신호를 기초로 상기 횡방향 주행 제어와 관련한 제어기의 고장 여부, 및 상기 종방향 주행 제어와 관련한 제어기의 고장 여부를 판단하는 것을 특징으로 하는 차량 제어 장치. - 제 1 항에 있어서,
상기 차량 상태 판단부는,
상기 정상 동력원이 있는 경우, 상기 정상 동력원을 이용하여 상기 차량의 파워트레인 허용 출력을 계산하는 것을 특징으로 하는 차량 제어 장치. - 제 1 항에 있어서,
상기 주행 조건 판단부는,
상기 차량이 구배 위에 위치하거나, 후방에서 다른 차량이 접근 중이거나, 또는 최저 속도 제한 구역에 위치하는 경우, 상기 사고 위험 주행 조건을 만족하는 것으로 판단하는 것을 특징으로 하는 차량 제어 장치. - 제 5 항에 있어서,
상기 차량 제어부는,
상기 횡방향 주행 제어가 불가능하거나, 상기 정상 동력원이 없거나, 또는 상기 사고 위험 주행 조건을 만족하지 않는 경우, 기설정된 최소 토크로 차량 주행을 제어하는 것을 특징으로 하는 차량 제어 장치. - 차량 상태 판단부가, 차량의 토크 이상 감지시, 상기 차량의 횡방향 및 종방향 주행 제어 상태를 판단하는 상태 판단 단계;
상기 차량 상태 판단부가, 상기 횡방향 주행 제어의 정상 상태이고, 상기 종방향 주행 제어의 고장 상태인 경우, 상기 차량의 복수의 동력원 중에서 정상 동력원을 판단하는 정상 동력원 판단 단계;
주행 조건 판단부가, 상기 정상 동력원이 있는 경우, 차량 정보를 이용하여 사고 위험 주행 조건을 판단하는 주행 조건 판단 단계; 및
차량 제어부가, 상기 사고 위험 주행 조건을 만족하는 경우, 타겟 안전 토크를 이용하여 차량 주행을 제어하는 안전 토크 제어 단계;
를 포함하는 차량 제어 방법. - 제 7 항에 있어서,
상기 상태 판단 단계 이전에, 상기 차량 상태 판단부가 사용자의 요구 토크와 상기 차량의 토크를 이용하여 정상 토크 여부를 판단하는 감지 단계; 및
상기 감지 단계 이후에 상기 차량 상태 판단부가 상기 차량의 토크 이상 감지시, 상기 차량의 종방향 주행 제어 및 횡방향 주행 제어와 관련한 제어기로부터 현재 상태 신호를 전달받는 상태 확인 단계;
를 더 포함하는 것을 특징으로 하는 차량 제어 방법. - 제 8 항에 있어서,
상기 상태 판단 단계는,
상기 현재 상태 신호를 기초로 상기 횡방향 주행 제어와 관련한 제어기의 고장 여부를 판단하는 제1 상태 판단 단계; 및
상기 현재 상태 신호를 기초로 상기 종방향 주행 제어와 관련한 제어기의 고장 여부를 판단하는 제2 상태 판단 단계;
를 포함하는 것을 특징으로 하는 차량 제어 방법. - 제 7 항에 있어서,
상기 정상 동력원 판단 단계 이후에, 상기 차량 상태 판단부가 정상 동력원이 있는 경우, 상기 정상 동력원을 이용하여 상기 차량의 파워트레인 허용 출력을 계산하는 계산 단계;
를 더 포함하는 것을 특징으로 하는 차량 제어 방법. - 제 10 항에 있어서,
상기 주행 조건 판단 단계 이후에, 상기 주행 조건 판단부가 상기 차량이 구배 위에 위치하거나, 후방에서 다른 차량이 접근 중이거나, 또는 최저 속도 제한 구역에 위치하는 경우, 상기 사고 위험 주행 조건을 만족하는 것으로 판단하는 사고 위험 판단 단계;
를 더 포함하는 것을 특징으로 하는 차량 제어 방법. - 제 11 항에 있어서,
상기 차량 제어부가 상기 횡방향 주행 제어가 불가능하거나, 상기 정상 동력원이 없거나, 또는 상기 사고 위험 주행 조건을 만족하지 않는 경우, 기설정된 최소 토크로 차량 주행을 제어하는 안전 마진 토크 제어 단계;
를 더 포함하는 것을 특징으로 하는 차량 제어 방법.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020220097914A KR102817833B1 (ko) | 2022-08-05 | 2022-08-05 | 차량 제어 장치 및 방법 |
| DE102023120617.6A DE102023120617A1 (de) | 2022-08-05 | 2023-08-03 | Fahrzeugsteuerungsvorrichtung und -verfahren zur durchführung einer drehmomentsteuerung eines fahrzeugs |
| US18/364,948 US12552397B2 (en) | 2022-08-05 | 2023-08-03 | Vehicle control apparatus and method for performing torque control of vehicle |
| CN202310982100.8A CN117508177A (zh) | 2022-08-05 | 2023-08-04 | 车辆控制装置及方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020220097914A KR102817833B1 (ko) | 2022-08-05 | 2022-08-05 | 차량 제어 장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20240020004A true KR20240020004A (ko) | 2024-02-14 |
| KR102817833B1 KR102817833B1 (ko) | 2025-06-05 |
Family
ID=89575349
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020220097914A Active KR102817833B1 (ko) | 2022-08-05 | 2022-08-05 | 차량 제어 장치 및 방법 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12552397B2 (ko) |
| KR (1) | KR102817833B1 (ko) |
| CN (1) | CN117508177A (ko) |
| DE (1) | DE102023120617A1 (ko) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102817833B1 (ko) * | 2022-08-05 | 2025-06-05 | 주식회사 현대케피코 | 차량 제어 장치 및 방법 |
| US20250058764A1 (en) * | 2023-08-14 | 2025-02-20 | GM Global Technology Operations LLC | Driver torque demand to enable coordination between vehicle torque sources |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007203883A (ja) * | 2006-02-02 | 2007-08-16 | Nissan Motor Co Ltd | 車両のフェイルセーフ走行制御システム |
| KR101063225B1 (ko) | 2008-12-05 | 2011-09-07 | 현대자동차주식회사 | 하이브리드 차량의 토크 모니터링 방법 |
| JP5692405B2 (ja) * | 2011-11-04 | 2015-04-01 | トヨタ自動車株式会社 | 車両および車両の制御方法 |
| KR101550543B1 (ko) * | 2014-06-03 | 2015-09-04 | 주식회사 현대케피코 | 림프-홈 모드 중 엔진의 출력제한치 상향 제어장치 및 이를 이용한 제어방법 |
| KR101776768B1 (ko) * | 2016-09-12 | 2017-09-19 | 현대자동차 주식회사 | 림프홈 모드에서의 마일드 하이브리드 차량 제어 방법 및 장치 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4337861B2 (ja) * | 2006-10-10 | 2009-09-30 | トヨタ自動車株式会社 | 運転制御装置および運転制御方法 |
| KR101567922B1 (ko) | 2011-04-07 | 2015-11-10 | 엘지전자 주식회사 | 전기자동차 및 그 제어방법 |
| US9457684B2 (en) * | 2014-03-26 | 2016-10-04 | Ford Global Technologies, Llc | Redundant electrical power for autonomous vehicles |
| US10549745B2 (en) | 2017-01-25 | 2020-02-04 | Ford Global Technologies, Llc | Vehicle powertrain controller and method |
| JP7088096B2 (ja) * | 2019-03-20 | 2022-06-21 | トヨタ自動車株式会社 | 車両用電池制御装置 |
| CN113246977B (zh) | 2021-07-08 | 2021-10-01 | 中汽研(天津)汽车工程研究院有限公司 | 一种基于功能安全的adas纵向控制扭矩监控装置及方法 |
| KR102817833B1 (ko) * | 2022-08-05 | 2025-06-05 | 주식회사 현대케피코 | 차량 제어 장치 및 방법 |
-
2022
- 2022-08-05 KR KR1020220097914A patent/KR102817833B1/ko active Active
-
2023
- 2023-08-03 US US18/364,948 patent/US12552397B2/en active Active
- 2023-08-03 DE DE102023120617.6A patent/DE102023120617A1/de active Pending
- 2023-08-04 CN CN202310982100.8A patent/CN117508177A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007203883A (ja) * | 2006-02-02 | 2007-08-16 | Nissan Motor Co Ltd | 車両のフェイルセーフ走行制御システム |
| KR101063225B1 (ko) | 2008-12-05 | 2011-09-07 | 현대자동차주식회사 | 하이브리드 차량의 토크 모니터링 방법 |
| JP5692405B2 (ja) * | 2011-11-04 | 2015-04-01 | トヨタ自動車株式会社 | 車両および車両の制御方法 |
| KR101550543B1 (ko) * | 2014-06-03 | 2015-09-04 | 주식회사 현대케피코 | 림프-홈 모드 중 엔진의 출력제한치 상향 제어장치 및 이를 이용한 제어방법 |
| KR101776768B1 (ko) * | 2016-09-12 | 2017-09-19 | 현대자동차 주식회사 | 림프홈 모드에서의 마일드 하이브리드 차량 제어 방법 및 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN117508177A (zh) | 2024-02-06 |
| US20240043021A1 (en) | 2024-02-08 |
| US12552397B2 (en) | 2026-02-17 |
| KR102817833B1 (ko) | 2025-06-05 |
| DE102023120617A1 (de) | 2024-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11148677B2 (en) | Vehicle, control system of vehicle, and control method of vehicle | |
| EP2858867B1 (en) | Powertrain control system and method | |
| US9610947B2 (en) | Method for lane-keeping support for automobiles | |
| US9266528B2 (en) | Control system, vehicle and method of controlling a vehicle | |
| US11458861B2 (en) | Vehicle control device | |
| US20190359221A1 (en) | Vehicle control system | |
| CN114212102B (zh) | 一种避免侧向碰撞的辅助驾驶方法、系统及装置 | |
| CN104590267A (zh) | 新能源汽车的扭矩安全控制方法 | |
| US10458356B2 (en) | Vehicle control apparatus | |
| US11390291B2 (en) | Method and device for the assisted, partially automated, highly automated, fully automated or driverless driving of a motor vehicle | |
| US20200298887A1 (en) | Vehicle, control system of vehicle, and control method of vehicle | |
| CN116331237A (zh) | 自动驾驶车辆的控制方法 | |
| US11472406B2 (en) | Vehicle control apparatus, vehicle, and vehicle control method | |
| CN111532270A (zh) | 车辆的制动力控制装置 | |
| KR102817833B1 (ko) | 차량 제어 장치 및 방법 | |
| US20130018562A1 (en) | Vehicle control device | |
| CN111661066A (zh) | 驾驶辅助装置 | |
| KR20150115667A (ko) | 자동차의 의도하지 않은 가속을 방지하기 위한 방법 및 장치 | |
| JP2011161956A (ja) | 中央制御装置 | |
| KR101712285B1 (ko) | 하이브리드 자동차 또는 전기자동차의 회생제동 제어방법 | |
| CN116661414B (zh) | 自动驾驶车辆的故障处理方法、装置、存储介质和电子设备 | |
| KR102741710B1 (ko) | 자율 주행차의 자율 주행 기능 고장 시 메인 브레이크 작동 시스템 | |
| WO2015116626A1 (en) | System and method for brake system verification | |
| CN106314429A (zh) | 行车安全辅助系统及行车安全辅助方法 | |
| CN110303893B (zh) | 车辆控制方法和装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20220805 |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20241112 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20250522 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20250602 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20250602 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |