RU2012013C1 - Адаптивный лазерный доплеровский локатор - Google Patents
Адаптивный лазерный доплеровский локатор Download PDFInfo
- Publication number
- RU2012013C1 RU2012013C1 SU4853357A RU2012013C1 RU 2012013 C1 RU2012013 C1 RU 2012013C1 SU 4853357 A SU4853357 A SU 4853357A RU 2012013 C1 RU2012013 C1 RU 2012013C1
- Authority
- RU
- Russia
- Prior art keywords
- input
- output
- frequency
- digital
- comparator
- Prior art date
Links
Images




Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
Изобретение относится к лазерной локации. Цель изобретения - увеличение дальности действия локатора. Цель достигается тем, что в устройство введены полосовой усилитель, анализатор кратковременной стабильности частоты, источник опорного напряжения, цифроаналоговые преобразователи, интегратор, компаратор, счетчик импульсов, регистр, таймер, цифровой блок сравнения. Устройство также содержит регистрирующий блок, состоящий из интерфейса, микропроцессора, накопитель информации, дисплей, принтер и общую шину, лазер-передатчик, передающий телескоп, лазер-гетеродин, отражатели, фотоприемное устройство, приемный объектив, полупрозрачные пластины, фотодетектор, блок автоподстройки частоты с пьезокорректором лазера-гетеродина, синхронизатор, генератор, смеситель, усилитель, дисперсионную линию задержки, амплитудный детектор, компаратор, счетчик импульсов, регистр, элементы задержки. 6 ил.
Description
Изобретение относится к лазерной локации и может быть использовано при построении доплеровских локаторов с когерентным приемом излучения.
Целью изобретения является увеличение дальности действия локатора.
На фиг. 1 показана блок-схема предлагаемого устройства; на фиг. 2 - схема структуры счетчика импульсов; на фиг. 3 представлена блок-схема синхронизатора; на фиг. 4 дана блок-схема анализатора кратковременной стабильности частоты биений на выходе дополнительного фотодетектора; на фиг. 5 приведена схема структуры таймера; на фиг. 6 - блок-схема интерфейса.
Устройство (фиг. 1) включает в себя лазер-передатчик 1, передающий телескоп 2, лазер-гетеродин 3, отражатели 4, 5, фотоприемное устройство 6, приемный объектив 7, полупрозрачные пластины 8-10, третий отражатель 11, дополнительный фотодетектор 12, блок 13 автоподстройки частоты (АПЧ), пьезокорректор 14 лазера-гетеродина, синхронизатор 15, генератор 16 линейно-частотно-модулированных колебаний (ГЛЧМ), смеситель 17, согласующий усилитель 18, дисперсионную линию 19 задержки (ДЛЗ), полосовой усилитель 20 с регулируемой полосой пропускания, амплитудный детектор 21, первый компаратор 22, первый счетчик 23 импульсов, первый регистр 24, элементы 25, 26 задержки, источник 27 опорного напряжения, дополнительный цифроаналоговый преобразователь 28 (ЦАП), интегратор 29, второй компаратор 30, второй счетчик 31 импульсов, второй регистр 32, цифровой блок 33 сравнения (вычитания), регистрирующий блок, состоящий из интерфейса 34, микропроцессора 35, накопителя 36 информации (например ОЗУ "электронный диск" и накопитель на магнитном диске), дисплея 37, принтера 38 с возможным использованием графопостроителя, а также анализатор 39 кратковременной стабильности частоты (биений на выходе фотодетектора 12), таймер 40, общую шину 41 (связи с внешними устройствами), привод 42 сканирования, блок 43 управления приводом, цифроаналоговый преобразователь 44.
Устройство работает следующим образом.
Лазер-передатчик 1 и лазер-гетеродин 3 создают излучения, разность частот которых Δ νo = νог - νоп, где νоп и νог частоты излучений соответственно лазера-передатчика 1 и лазера-гетеродина 3, автоматически поддерживается неизменной в среднем с помощью системы из дополнительного фотодетектора 12, связанного оптически с указанными лазерами полупрозрачными пластинами 8-10 и отражателем 11, а электрически - с блоком 13 автоподстройки частоты, выход которого подключен к пьезокорректору 14 лазера-гетеродина. В состав АПЧ входит либо частотный детектор, настроенный на среднюю частоту Δ νo , либо кварцевый генератор с преобразователем частоты и фазовым детектором, причем в последнем случае кварцевый генератор вырабатывает колебания частоты Δ νo . При этом система автоподстройки отслеживает относительно медленные флуктуации частоты лазерного излучения и медленный температурный дрейф, не устраняя, однако, действия быстрых флуктуаций частоты. Величина среднеквадратической вариации частоты сигнала биений на выходе фотоприемного устройства лазерного доплеровского локатора δν  в зависимости от времени усреднения τ , соответствующего дальномерной задержке τD = 2D/c, где D - дальность до объекта локации; с - скорость света, определяется выражением
в зависимости от времени усреднения τ , соответствующего дальномерной задержке τD = 2D/c, где D - дальность до объекта локации; с - скорость света, определяется выражением
 ≃
≃ 
 , где Sfш - спектральная плотность девиации частоты лазерного излучения в процессе дестабилизации; fш - частота дестабилизирующего шума, основная часть энергии которого (до 90% ), как показали данные опытной проверки, сосредоточена в полосе частот 0 ≅ fш ≅ fш.max; где fш.max = 1 кГц. Указанное выражение справедливо при τ ≅100-300 мкс, т. е. при работе локаторов в ближней зоне (Dm ≅ 10 км). Для гетеродинных доплеровских локаторов с отдельными лазерами для передачи и приема, как в рассматриваемом устройстве, при использовании стабилизированных одночастотных лазеров с кратковременной стабильностью порядка 109 за время усреднения τ = 1 мс величина крутизны α = d (
, где Sfш - спектральная плотность девиации частоты лазерного излучения в процессе дестабилизации; fш - частота дестабилизирующего шума, основная часть энергии которого (до 90% ), как показали данные опытной проверки, сосредоточена в полосе частот 0 ≅ fш ≅ fш.max; где fш.max = 1 кГц. Указанное выражение справедливо при τ ≅100-300 мкс, т. е. при работе локаторов в ближней зоне (Dm ≅ 10 км). Для гетеродинных доплеровских локаторов с отдельными лазерами для передачи и приема, как в рассматриваемом устройстве, при использовании стабилизированных одночастотных лазеров с кратковременной стабильностью порядка 109 за время усреднения τ = 1 мс величина крутизны α = d ( )/ dτ временной характеристики среднеквадратической вариации частоты δν
)/ dτ временной характеристики среднеквадратической вариации частоты δν  имеет порядок α=
имеет порядок α=  102 Гц/мкс = 144 ˙ 10 61/с
102 Гц/мкс = 144 ˙ 10 61/с  Следовательно, уширение спектра сигнала биений на выходе фотоприемного устройства локатора при обнаружении объекта, удаленного на расстояние 10 км от локатора, достигает величины 9,6 кГц, что приводит к уширению длительности сжатого импульса на выходе ДЛЗ-спектроанализатора. Для исключения зависимости обнаружительной способности локатора по отношению к заданному классу объектов от действия параметра
Следовательно, уширение спектра сигнала биений на выходе фотоприемного устройства локатора при обнаружении объекта, удаленного на расстояние 10 км от локатора, достигает величины 9,6 кГц, что приводит к уширению длительности сжатого импульса на выходе ДЛЗ-спектроанализатора. Для исключения зависимости обнаружительной способности локатора по отношению к заданному классу объектов от действия параметра  как функции дальности до объекта было предложено использовать связанный с выходом ДЛЗ 19 полосовой усилитель 20 с регулируемым параметром - полосой пропускания Δ fпч, величину которой следует выбирать равной
как функции дальности до объекта было предложено использовать связанный с выходом ДЛЗ 19 полосовой усилитель 20 с регулируемым параметром - полосой пропускания Δ fпч, величину которой следует выбирать равной
Δfпч= , (1) где Δ Fлз - рабочая полоса ДЛЗ, с помощью которой соответствующий ЛЧМ-эквивалент сигнала сжимается в В раз, где B = Δ Fлз ˙ τлз- база ДЛЗ 19.
, (1) где Δ Fлз - рабочая полоса ДЛЗ, с помощью которой соответствующий ЛЧМ-эквивалент сигнала сжимается в В раз, где B = Δ Fлз ˙ τлз- база ДЛЗ 19.
Δfпч=
В качестве полосового усилителя 20 с регулируемой полосой пропускания в соответствии с выражением (1) в устройстве используется усилитель 20, а анализ среднеквадратической вариации частоты δν  возложен на анализатор 39.
возложен на анализатор 39.
Для приближающегося со скоростью Vц к локатору объекта частота сигнала биений fc будет иметь вид: fc = νос - νог = (2Vц/ λ ) - Δ νo. Это указывает на то, что широкополосность фотоприемного устройства должна быть достаточной для приема оптических колебаний в режиме их фотосмещения.
Характер принимаемого излучения - квазимонохроматический с уширением спектра биений величиной δν  . Поэтому для обработки такого сигнала с неизвестной частотой fc (поскольку априори неизвестна радиальная скорость объекта Vц), как известно, следует подвергнуть его преобразованию в ЛЧM-эквивалент с помощью смесителя 17, на второй вход которого подаются колебания ГЛЧМ 16, вид которых должен быть строго согласован с применяемой ДЛЗ 19. Согласование должно быть, в первую очередь, по величине дисперсии в ДЛЗ, т. е. по скорости изменения частоты в ГЛЧМ 16, согласно условию:
. Поэтому для обработки такого сигнала с неизвестной частотой fc (поскольку априори неизвестна радиальная скорость объекта Vц), как известно, следует подвергнуть его преобразованию в ЛЧM-эквивалент с помощью смесителя 17, на второй вход которого подаются колебания ГЛЧМ 16, вид которых должен быть строго согласован с применяемой ДЛЗ 19. Согласование должно быть, в первую очередь, по величине дисперсии в ДЛЗ, т. е. по скорости изменения частоты в ГЛЧМ 16, согласно условию:  df
df dt = Δ Fлз/τлз, а также по знаку дисперсии (если в ДЛЗ применена падающая частотно-временная характеристика, то на ее вход должен подаваться ЛЧM-сигнал с возрастающей частотно-временной характеристикой, и наоборот). Кроме того, диапазон перестройки и период перестройки в ГЛЧМ 16 должны подчиняться условию: ΔFГЛЧМ = Δ Fлз + +Δ FΣ - для полосы перестройки и условию: Та = τлз (1 + Δ FΣ / Δ Fлз) - для периода перестройки, где Δ FΣ - полоса неопределенности по частоте сигнала fc, равная ΔFΣ=
dt = Δ Fлз/τлз, а также по знаку дисперсии (если в ДЛЗ применена падающая частотно-временная характеристика, то на ее вход должен подаваться ЛЧM-сигнал с возрастающей частотно-временной характеристикой, и наоборот). Кроме того, диапазон перестройки и период перестройки в ГЛЧМ 16 должны подчиняться условию: ΔFГЛЧМ = Δ Fлз + +Δ FΣ - для полосы перестройки и условию: Та = τлз (1 + Δ FΣ / Δ Fлз) - для периода перестройки, где Δ FΣ - полоса неопределенности по частоте сигнала fc, равная ΔFΣ=  , где Δ Vц = Vц.max. - Vц.min. - ожидаемый разброс радиальных скоростей объектов (Vц.min. и Vц.max. соответственно минимальная и максимальная ожидаемые радиальные скорости). Период перестройки ЛЧМ колебания в ГЛЧМ 16 фактически является временем анализа сигнала по его частоте. Запуск ГЛЧМ 16 осуществляется от синхронизатора 15, на первом выходе которого возникают строб-импульсы с частотой следования Fзап = 1/Та.
, где Δ Vц = Vц.max. - Vц.min. - ожидаемый разброс радиальных скоростей объектов (Vц.min. и Vц.max. соответственно минимальная и максимальная ожидаемые радиальные скорости). Период перестройки ЛЧМ колебания в ГЛЧМ 16 фактически является временем анализа сигнала по его частоте. Запуск ГЛЧМ 16 осуществляется от синхронизатора 15, на первом выходе которого возникают строб-импульсы с частотой следования Fзап = 1/Та.
Для определения рассмотрения следует задаться параметрами ДЛЗ, т. е. выбрать тип применяемой в канале обработки сигнала ДЛЗ.
Для определения рассмотрения следует задаться параметрами ДЛЗ, т. е. выбрать тип применяемой в канале обработки сигнала ДЛЗ.
Для выполнения одного из важных условий согласования необходимо задать среднюю частоту колебаний в ГЛЧМ 16 foГЛЧМ так, чтобы она была выше средней частоты полосы прозрачности в ДЛЗ 19 foДЛЗ на величину средней частоты диапазона принимаемых сигналов foc = (2Vоц/(λ) - Δ νo, где Vоц - среднее значение радиальной скорости объектов. Иначе говоря, имеет место соотношение частот преобразования foГЛЧМ = foДЛЗ + foc.
На выходе смесителя 17 образуются ЛЧМ-эквиваленты входного сигнала, согласованные с применяемой ДЛЗ 19 в соответствии с вышеуказанным критериями. До процедуры сжатия ЛЧМ-эквивалентов в ДЛЗ 19 применяется усиление их в согласующем усилителе 18 с центральной частотой настройки, равной центральной частоте полосы прозрачности ДЛЗ 19 foДЛЗ, и с полосой пропускания, не меньшей полосы Δ Fлз ДЛЗ.
Как известно, при сжатии в ДЛЗ идеального ЛЧМ-сигнала, точно согласованного с дисперсией ДЛЗ, на выходе последней образуется радиоимпульс с несущей частотой foДЛЗ и длительностью τсж=  по уровню 0,707 от амплитуды. Для усиления такого радиоимпульса необходимо использовать полосовой усилитель 20 с центральной частотой foДЛЗ и полосой пропускания Δfпч.max. = ΔFлз.
по уровню 0,707 от амплитуды. Для усиления такого радиоимпульса необходимо использовать полосовой усилитель 20 с центральной частотой foДЛЗ и полосой пропускания Δfпч.max. = ΔFлз.
При росте акустического шума и других дестабилизирующих факторов уширение сжатых импульсов также возрастает.
При росте акустического шума и других дестабилизирующих факторов уширение сжатых импульсов также возрастает.
Пусть кратность уширения на выходе ДЛЗ может при вариации условий дестабилизации изменяться в пределах от 1 до 5. Это означает, что инвариантность обнаружительной способности по отношению к изменению параметра δν  будет обеспечена, если полоса пропускания в сквозном тракте усиления после ДЛЗ 19, например в полосовом усилителе 20, будет регулироваться в пределах заданной кратности уширения. Естественно, что изменение этой полосы пропускания Δ fпч приведет к адекватному изменению и полосы шума Δ fш = F(f*), являющейся функцией F от среднеквадратической частоты спектра шумов f*, величина которой определяется из известной формулы:
будет обеспечена, если полоса пропускания в сквозном тракте усиления после ДЛЗ 19, например в полосовом усилителе 20, будет регулироваться в пределах заданной кратности уширения. Естественно, что изменение этой полосы пропускания Δ fпч приведет к адекватному изменению и полосы шума Δ fш = F(f*), являющейся функцией F от среднеквадратической частоты спектра шумов f*, величина которой определяется из известной формулы:
f*= f2G(f)df/
f2G(f)df/ G(f)df
G(f)df , (2) где G(f) - спектральная плотность шума. В первом приближении, при почти прямщугольной функции G(f) полосовой фильтрации имеем
, (2) где G(f) - спектральная плотность шума. В первом приближении, при почти прямщугольной функции G(f) полосовой фильтрации имеем
f
 = Δfпч/
= Δfпч/ при условии, что средняя частота
при условии, что средняя частота  полосы пропускания Δfпч в видеотракте
полосы пропускания Δfпч в видеотракте  = Δfпч/2 и имеется замена foДЛЗ на
= Δfпч/2 и имеется замена foДЛЗ на  . Регулировку полосы пропускания в тракте после ДЛЗ можно проводить также в видеоусилителе после амплитудного детектора 21 (в фильтре нижних частот амплитудного детектора) и при условии линейного детектирования, которое в данном случае соблюдается, такая регулировка эквивалентна регулировке полосы в усилителе 20.
. Регулировку полосы пропускания в тракте после ДЛЗ можно проводить также в видеоусилителе после амплитудного детектора 21 (в фильтре нижних частот амплитудного детектора) и при условии линейного детектирования, которое в данном случае соблюдается, такая регулировка эквивалентна регулировке полосы в усилителе 20.
f*=
f
После усиления и амплитудного детектирования сжатый видеоимпульс воздействует на первый компаратор 22, выполняющий функцию решающего устройства анализатора, порог ограничения по минимуму в котором Uп1выбирается из условий обеспечения при заданном отношении сигнал/шум на выходе фильтра нижних частот амплитудного детектора 21, обозначаемом как μ , необходимой величины вероятности ложных тревог, соответственно обозначаемой как Fлт.
Для обеспечения заданного значения частоты ложных тревог fлт1 на выходе первого компаратора 22 при найденном значении величины f* необходимо установить порог компарирования Uп1, зависящий от величины  , следующей величины:
, следующей величины:
Uп1=
 , (3) где
, (3) где  - среднеквадратическое напряжение шума на выходе амплитудного детектора 21.
- среднеквадратическое напряжение шума на выходе амплитудного детектора 21.
Uп1=
Поскольку целью изобретения является выполнение условий
 ≃ 0 ,
≃ 0 ,  ≃ 0, (4) то ее достижение требует знания величин
≃ 0, (4) то ее достижение требует знания величин  и f*, которые являются переменными, определяющими двумерную функцию fлт1 = fлт1(
и f*, которые являются переменными, определяющими двумерную функцию fлт1 = fлт1( , f*) частоты ложных тревог. Задавая fлт1 по условию исходной задачи, определяя f* как функцию полосы Δfпч и определяя напряжение порога Uп1, значение среднеквадратического напряжения шума вычисляется из (3). Однако автоматизация процесса задания порога Uп1, удовлетворяющего условиям (3), (4) совместно, требует создания соответствующих технических средств.
, f*) частоты ложных тревог. Задавая fлт1 по условию исходной задачи, определяя f* как функцию полосы Δfпч и определяя напряжение порога Uп1, значение среднеквадратического напряжения шума вычисляется из (3). Однако автоматизация процесса задания порога Uп1, удовлетворяющего условиям (3), (4) совместно, требует создания соответствующих технических средств.
В том случае, если сжатый импульс на входе первого компаратора 22 превышает по амплитуде порог ограничения Uп1, на выходе этого компаратора возникает импульс "Стоп" для первого счетчика 23 импульсов, который запускается с выхода синхронизатора 15, как и ГЛЧМ 16, и в нем имеет место счет высокочастотных импульсов, поступающих на счетный вход первого счетчика 23 импульсов с второго выхода синхронизатора 15. По числу N накопленных в этом счетчике импульсов счета за время воздействия от подачи импульса "Пуск" до подачи импульса "Стоп" на счетчик 23 судят о частоте fc входного сигнала.
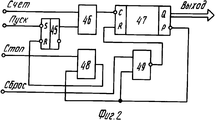
Первый счетчик 23 импульсов (фиг. 2) содержит последовательно соединенные RS-триггер 45 управления, электронный ключ 46 (схема И), собственно счетчик 47 импульсов, а также двухвходовую схему И 48 и двухвходовую схему И-НЕ 49. Сигналы "Пуск" и "Стоп" изменяют состояние RS-триггера 45 управления либо пропуская счетные импульсы "Счет" через электронный ключ 46 на счетный вход счетчика 47, либо не пропуская их. Сигналом "Сброс" осуществляется в каждом цикле счета обнуление счетчика 47, причем эта операция может осуществляться как внешним сигналом с выхода второго элемента 26 задержки (см. фиг. 1), так и внутренним сигналом переполнения счетчика 47 с его R-выхода переполнения, если внешний сигнал отсутствует из-за отсутствия объекта локации в зоне обнаружения в заданном направлении поиска. Аналогичную структуру имеет и второй счетчик 31 импульсов.
Структура синхронизатора 15 (фиг. 3) содержит последовательно соединенные высокочастотный генератор 50 счетных (тактовых) импульсов (ГТИ) и делитель 51 частоты (ДЧ), имеющий коэффициент деления Кдел = fт˙Тa, где fт - частота следования счетных (тактовых) импульсов в генераторе 50.
После того, как на первый счетчик 23 импульсов поступил сигнал "Стоп" с выхода первого компаратора 22, пересчет в этом счетчике завершается и накопленное в нем число импульсов N = Δt ˙ fт, где Δ t - интервал времени между моментами импульсов "Стоп" и "Пуск", воздействующих на первый счетчик 23, с погрешностью не более ± 1 единицы счета переписывается в форме двоичного кода в первый регистр 24 по сигналу "Запись", образованному из импульса "Стоп", задержанного в первом элементе 25 задержки (величина задержки - доли микросекунды), и хранится в нем до следующей записи в новом цикле анализа (если он не пустой). После записи этого кода числа N в первом регистре 24 дополнительно задержанный импульс "Запись" во втором элементе 26 задержки (задержка также доли микросекунды) превращается в сигнал "Сброс" (внешний) применительно для работы первого счетчика 23 импульсов, а также фиксирует наличие в поле зрения локатора обнаруженного им объекта. Этот сигнал поступает как квалифицирующий признак наличия объекта в тракт вторичной переработки информации (интерфейс 34) вместе с кодом числа N с выхода первого регистра 24.
При круговом сканировании, например, в плоскости азимута с частотой сканирования Fск, задаваемой оператором, при мгновенном угле поля зрения локатора в азимутальной плоскости γ наибольшее время оптического контакта локатора с объектом, рассматриваемым как дифракционный (точечный), равно TΣ=  -
-  , где D - текущая дальность до объекта. При этом в течение времени TΣ считается принятый сигнал как квазимонохроматический fc = const(t). Синхронизатор 15 формирует из последовательности тактовых импульсов частоты fт путем деления в Кдел раз (фиг. 3) импульсы "Пуск" для первого счетчика 23 импульсов и, что одно и то же, импульсы "Запуск" для ГЛЧМ 16. Этими импульсами синхронизируется работа ГЛЧМ 16. В результате смешения входного квазимонохроматического сигнала с частотой fт с колебаниями ГЛЧМ 16 образуются ЛЧМ-эквиваленты, согласованные с ДЛЗ 19. Рассмотрим работу анализатора 39 кратковременной стабильности частоты сигнала биений, образующийся на выходе дополнительного фотодетектора 12, который дает адекватную оценку этой величины на выходе фотоприемного устройства 6. Этот анализатор (фиг. 4) содержит последовательно соединенные преобразователь 52 частоты, полосовой фильтр 53, широкополосную линию 54 задержки с регулируемой задержкой (многоотводную линию с переключением отводов к выходу), балансный смеситель 55, к второму входу которого подсоединен вход анализатора, связанный также с входом преобразователя 52 частоты, усилитель-ограничитель 56, параллельно работающие первый 57 и второй 58 кварцевые фильтры, параллельно работающие первый 59 и второй 60 детекторы огибающей, сумматор 61, аналоговый вычитатель 62, а также последовательно соединенные аналоговый перемножитель 63, фильтр 64 нижних частот, а также генератор 65, управляемый напряжением, выход которого подключен к второму входу преобразователя 52 частоты, а выход аналогового сумматора 61 одновременно является выходом анализатора, возникающее на нем напряжение U(δ ν ) однозначно функционально связано с величиной δν (
, где D - текущая дальность до объекта. При этом в течение времени TΣ считается принятый сигнал как квазимонохроматический fc = const(t). Синхронизатор 15 формирует из последовательности тактовых импульсов частоты fт путем деления в Кдел раз (фиг. 3) импульсы "Пуск" для первого счетчика 23 импульсов и, что одно и то же, импульсы "Запуск" для ГЛЧМ 16. Этими импульсами синхронизируется работа ГЛЧМ 16. В результате смешения входного квазимонохроматического сигнала с частотой fт с колебаниями ГЛЧМ 16 образуются ЛЧМ-эквиваленты, согласованные с ДЛЗ 19. Рассмотрим работу анализатора 39 кратковременной стабильности частоты сигнала биений, образующийся на выходе дополнительного фотодетектора 12, который дает адекватную оценку этой величины на выходе фотоприемного устройства 6. Этот анализатор (фиг. 4) содержит последовательно соединенные преобразователь 52 частоты, полосовой фильтр 53, широкополосную линию 54 задержки с регулируемой задержкой (многоотводную линию с переключением отводов к выходу), балансный смеситель 55, к второму входу которого подсоединен вход анализатора, связанный также с входом преобразователя 52 частоты, усилитель-ограничитель 56, параллельно работающие первый 57 и второй 58 кварцевые фильтры, параллельно работающие первый 59 и второй 60 детекторы огибающей, сумматор 61, аналоговый вычитатель 62, а также последовательно соединенные аналоговый перемножитель 63, фильтр 64 нижних частот, а также генератор 65, управляемый напряжением, выход которого подключен к второму входу преобразователя 52 частоты, а выход аналогового сумматора 61 одновременно является выходом анализатора, возникающее на нем напряжение U(δ ν ) однозначно функционально связано с величиной δν ( ), если в широкополосной линии 54 задержки величина задержки выбрана равной заданной дальномерной задержке τD.max= 2Dm/c, соответствующей заданной априорно границе по дальности обнаружения объектов заданного класса. Существенно, что кварцевые фильтры 57 и 58 являются узкополосными и взаимно расстроенными относительно установившегося значения частоты генератора 65, управляемого напряжением, причем величина взаимной расстройки этих кварцевых фильтров выбрана больше наибольшего возможного значения частотной вариации Мах δν (
), если в широкополосной линии 54 задержки величина задержки выбрана равной заданной дальномерной задержке τD.max= 2Dm/c, соответствующей заданной априорно границе по дальности обнаружения объектов заданного класса. Существенно, что кварцевые фильтры 57 и 58 являются узкополосными и взаимно расстроенными относительно установившегося значения частоты генератора 65, управляемого напряжением, причем величина взаимной расстройки этих кварцевых фильтров выбрана больше наибольшего возможного значения частотной вариации Мах δν ( ), а величина полосы пропускания в каждом из кварцевых фильтров выбрана несколько меньшей указанной полосы расстройки. Генератор 65, управляемый напряжением, вырабатывает колебания, частота которых равна среднему арифметическому от центральных частот настроек кварцевых фильтров 57 и 58. Полосовой фильтр 53 выделяет суммарную частоту преобразования, в среднем равную Δ νo + foгун где fогун- средняя частота автоколебаний в генераторе 65, управляемом напряжением, поэтому широкополосная линия 54 задержки выбирается с общей задержкой, определяемой величиной расчетной Dm (расчетной максимальной дальности). После балансного смесителя в фильтруемом в усилителе-ограничителе 56 колебаний разностной частоты появляется составляющая частотной вариации δν (
), а величина полосы пропускания в каждом из кварцевых фильтров выбрана несколько меньшей указанной полосы расстройки. Генератор 65, управляемый напряжением, вырабатывает колебания, частота которых равна среднему арифметическому от центральных частот настроек кварцевых фильтров 57 и 58. Полосовой фильтр 53 выделяет суммарную частоту преобразования, в среднем равную Δ νo + foгун где fогун- средняя частота автоколебаний в генераторе 65, управляемом напряжением, поэтому широкополосная линия 54 задержки выбирается с общей задержкой, определяемой величиной расчетной Dm (расчетной максимальной дальности). После балансного смесителя в фильтруемом в усилителе-ограничителе 56 колебаний разностной частоты появляется составляющая частотной вариации δν ( ) при τ = τзад - задержке в линии 54. После фильтрации в кварцевых фильтрах 57 и 58, выполняющих совместно функцию частотного детектора с первым и вторым детекторами 59 и 60, на выходе аналогового вычитателя 62 возникает сигнал ошибки, управляющий частотой генератора 65, управляемого напряжением, снимаемым с выхода аналогового перемножителя 63 через фильтр 64 нижних частот. Повышению чувствительности схемы автоподстройки способствует применение аналогового перемножителя 63, на второй вход которого поступает выходной сигнал аналогового сумматора 61, величина которого тем больше, чем шире спектр анализируемого сигнала биений на выходе балансного смесителя 55, а последний соответствует спектру сигнала биений на выходе фотоприемного устройства 6 при условии, что τзад = 2Dm/c для априорно установленной границы по дальности обнаружения объектов заданного класса. В первом приближении при правильном выборе настроек первого и второго кварцевых фильтров 57 и 58 зависимость между величинами U (δ ν) и δν (
) при τ = τзад - задержке в линии 54. После фильтрации в кварцевых фильтрах 57 и 58, выполняющих совместно функцию частотного детектора с первым и вторым детекторами 59 и 60, на выходе аналогового вычитателя 62 возникает сигнал ошибки, управляющий частотой генератора 65, управляемого напряжением, снимаемым с выхода аналогового перемножителя 63 через фильтр 64 нижних частот. Повышению чувствительности схемы автоподстройки способствует применение аналогового перемножителя 63, на второй вход которого поступает выходной сигнал аналогового сумматора 61, величина которого тем больше, чем шире спектр анализируемого сигнала биений на выходе балансного смесителя 55, а последний соответствует спектру сигнала биений на выходе фотоприемного устройства 6 при условии, что τзад = 2Dm/c для априорно установленной границы по дальности обнаружения объектов заданного класса. В первом приближении при правильном выборе настроек первого и второго кварцевых фильтров 57 и 58 зависимость между величинами U (δ ν) и δν ( ) является квазилинейной: δν (
) является квазилинейной: δν ( ) = a ˙ U(δ ν) , где a - размерный коэффициент. При этом характеристика управления полосовым усилителем 20 с регулируемой полосой пропускания согласно (1) при
) = a ˙ U(δ ν) , где a - размерный коэффициент. При этом характеристика управления полосовым усилителем 20 с регулируемой полосой пропускания согласно (1) при
Δfпч= (6) и используется в дальнейшем для управления блоком 20 с помощью микропроцессора 35 и для расчета в последнем же величины f* с учетом выражения (2) или его приближения. В результате этого расчета формируется управляющее напряжение Uупр(Δ ˙ fпч) на третьем выходе интерфейса 34, воздействующее на управляющий (второй) вход полосового усилителя 20 и определяющее его полосу пропускания Δ fпч. Одновременно расчетом в микропроцессоре 35 напряжению U(δ ν), подаваемому на второй вход интерфейса 34, однозначно соответствует искомое значение f*, которое используется при автоматическом задании порога в первом компараторе 22.
(6) и используется в дальнейшем для управления блоком 20 с помощью микропроцессора 35 и для расчета в последнем же величины f* с учетом выражения (2) или его приближения. В результате этого расчета формируется управляющее напряжение Uупр(Δ ˙ fпч) на третьем выходе интерфейса 34, воздействующее на управляющий (второй) вход полосового усилителя 20 и определяющее его полосу пропускания Δ fпч. Одновременно расчетом в микропроцессоре 35 напряжению U(δ ν), подаваемому на второй вход интерфейса 34, однозначно соответствует искомое значение f*, которое используется при автоматическом задании порога в первом компараторе 22.
Δfпч=
Обратимся теперь к рассмотрению схемы автоматической установки порога Uп1 первого компаратора 22 в соответствии с (3) и (4). Простейшим является решение по стабилизации частоты ложных тревог fлт1 на требуемом уровне с помощью системы автонастройки порога Uп1. Однако такая схема стабилизации обладала бы чрезвычайно низким быстродействием, не совместимым с динамикой сканирования локатора по угловым координатам (т. е. темпом изменения σш( ), а также с динамикой управления полосой пропускания Δ fпч(t) в блоке 20, поскольку характерные значения fлт1имеют порядок десятых, сотых, тысячных и менее долей одного герца. Поэтому в заявляемом устройстве используется второй компаратор 30, соединенный с выходом амплитудного детектора и работающий при существенно более низком пороге Uп2 < Uп1, чем первый компаратор 22. Это позволяет на несколько порядков увеличить частоту ложных тревог fлт 2 на выходе этого компаратора. Поскольку частота fлт2 достаточно высокая, ее можно стабилизировать контуром автонастройки порога Uп2. Этот контур автонастройки содержит последовательно включенные дополнительный цифроаналоговый преобразователь 28 с включенным к нему источником 27 опорного напряжения, интегратор 29, второй компаратор 30, второй счетчик 31 импульсов, второй регистр 32, цифровой блок 33 сравнения, на второй вход которого подан опорный код Ко с четвертого выхода интерфейса 34, причем выход блока 33, на котором возникает код разности ΔК(t) = Ko - K(t), где К(t) - текущий код с выхода второго регистра 32, связан с входом дополнительного цифроаналогового преобразователя 28, замыкая контур автонастройки, а также связан с первым входом интерфейса 34 для накопления массивов ΔК(t) в оперативной памяти микропроцессора, расположенной в накопителе 36 информации (например, ОЗУ типа "электронный диск"). Работа второго счетчика 31 импульсов задается таймером 40.
), а также с динамикой управления полосой пропускания Δ fпч(t) в блоке 20, поскольку характерные значения fлт1имеют порядок десятых, сотых, тысячных и менее долей одного герца. Поэтому в заявляемом устройстве используется второй компаратор 30, соединенный с выходом амплитудного детектора и работающий при существенно более низком пороге Uп2 < Uп1, чем первый компаратор 22. Это позволяет на несколько порядков увеличить частоту ложных тревог fлт 2 на выходе этого компаратора. Поскольку частота fлт2 достаточно высокая, ее можно стабилизировать контуром автонастройки порога Uп2. Этот контур автонастройки содержит последовательно включенные дополнительный цифроаналоговый преобразователь 28 с включенным к нему источником 27 опорного напряжения, интегратор 29, второй компаратор 30, второй счетчик 31 импульсов, второй регистр 32, цифровой блок 33 сравнения, на второй вход которого подан опорный код Ко с четвертого выхода интерфейса 34, причем выход блока 33, на котором возникает код разности ΔК(t) = Ko - K(t), где К(t) - текущий код с выхода второго регистра 32, связан с входом дополнительного цифроаналогового преобразователя 28, замыкая контур автонастройки, а также связан с первым входом интерфейса 34 для накопления массивов ΔК(t) в оперативной памяти микропроцессора, расположенной в накопителе 36 информации (например, ОЗУ типа "электронный диск"). Работа второго счетчика 31 импульсов задается таймером 40.
Таймер (фиг. 5) содержит последовательно связанные программируемые кодом Qs реверсивные счетчики 66 и 67 с входным ключом на схеме И-НЕ 68, на один из входов которой подается счетная последовательность частоты fсч от генератора 69 тактовых импульсов через формирователь 70 импульсов (компаратор), на другой вход схемы И-НЕ 68 подается управляющий режимом счета сигнал с выхода (прямого) RS-триггера 73. Когда на этом выходе RS-триггера 73 возникает уровень логической "1", ключ 68 пропускает на счетчики 66, 67 счетную последовательность с генератора 69. При этом содержимое счетчиков (код Qs) уменьшается вычитанием, и при подаче на счетчики Qs+1 тактовых импульсов на выходе переноса счетчика 67 возникает импульс, которым RS-триггер перебрасывается в противоположное состояние, и на его прямом выходе возникает уровень логического "0", после чего ключ 68 закрывается. Напротив, с этого же момента времени открывается электронный ключ 72, поскольку на инвертирующем ный ключ 72, поскольку на инвертирующем выходе RS-триггере 73 возникает уровень логической "1", и тактовые импульсы с формирователя 70 через открытый теперь ключ 72 поступают на счетный вход счетчика 71, кодовое состояние выходов которого по информационной шине поступает на вход дешифратора-демультиплексора 74. На другой его управляющий вход подается счетная последовательность импульсов с выхода ключа 72, поэтому на выходах дешифратора-демультиплексора 74 поочередно возникают распределенные во времени импульсы: сначала на первом выходе "Стоп", потом на втором "Запись" и далее на третьем "Сброс" и, наконец, на четвертом "Пуск". Эти импульсы являются выходными импульсами таймера и используются для работы второго счетчика 31 импульсов и второго регистра 32. При появлении на втором выходе дешифратора-демультиплексора импульса управления, в силу связи этого выхода с входами предзаписи счетчиков 66 и 67, в последние вновь записывается внешний код Qs, определяющий режим деления на Qs+1 этими счетчиками счетной последовательности с частотой fсч. При появлении на четвертом выходе дешифратора-демультиплексора 74 импульса управления на S-вход RS-триггера 73 воздействует опрокидывающий импульс, которым закрывается ключ 72 и вновь открывается ключ 68 для нового цикла счета в счетчиках 66 и 67. Кроме того, этим же импульсом ("Пуск") сбрасываются показания счетчика 71 в ноль через некоторое время задержки, формируемой элементами 75, 76 и 77. Время задержки определяется параметрами RC-цепи и имеет порядок долей микросекунды.
Поскольку на запись счетчика 71 расходуется всего только четыре тактовых импульса генератора 69, то интервал времени от возникновения импульса "Стоп" до появления импульса "Пуск" (нового цикла) на выходах таймера формируется периодически пакетом импульсов (по одному последовательно во времени на каждом из выходов) с периодичностью следования таких пакетов (Qs+5)/fсч. Если Qc >> 1, то говорят, что такие пакеты идут с большой скважностью q = 1,25 + 0,25 Qs.
Таким образом, таймер 40 задает режим работы второго счетчика 31 импульсов следующим образом. Структура этого счетчика 31 такая же, как и первого счетчика 23. Импульсом "Пуск" таймера 40 счетчик открывается на запись, причем счетными в данном случае являются импульсы с выхода второго компаратора 30. При этом счетчик 31 работает в простом режиме счета импульсов за интервал времени от импульса "Пуск" таймера до импульса "Стоп", которым второй счетчик 31 закрывается (счет импульсов ложных тревог прекращается в данном цикле счета). Затем импульсом "Запись" таймера, подаваемым на второй вход второго регистра 32, осуществляется перезапись содержимого K(t) второго счетчика 31 импульсов во второй регистр 32. После этого импульсом "Сброс" таймера 40, подаваемым на второй счетчик 31 импульсов, последний обнуляется и переходит в новый цикл счета после воздействия на него очередного импульса "Пуск".
С точностью до 1/Тп можно говорить об измерении текущего значения частоты ложных тревог fлт2(t) = K(t)/Тп. Если число К(t) относительно невелико, то точность таких измерений частоты ложных тревог fлт2оказывается довольно низкой. Именно поэтому целесообразно накопление массивов данных ΔК(t) с последующим статистическим анализом моментов распределения случайных величин К(t). Однако, с точки зрения работы замкнутого контура автонастройки порога Uп2, парциальные "грубые" измерения частоты ложных тревог fлт2 в дальнейшем сглаживаются с участием интегратора 29. Действительно, код разности Δ К(t) с выхода цифрового блока 33 сравнения поступает на информационный вход дополнительного цифроаналогового преобразователя 28, и при этом на его выходе возникает напряжение, знак которого определяется разностью Кo - K(t) (например, знак минус, если K(t) > Ко, и наоборот), а величина прямо пропорциональна произведению напряжения Uo источника 27 опорного напряжения на код разности | Δ K(t) | , т. е. это исходное напряжение равно
U1(t) = pUo(Кo - K(t), где p - коэффициент пропорциональности, равный p = 1/2m-1; m - число рабочих двоичных разрядов первого цифроаналогового преобразователя 28, работающего в режиме четырехквадрантного умножающего преобразователя. Разрядность m определяет верхний предел модуля кода разности Мах | ΔК(t)| линейной зоны цифроаналогового преобразования. Так, при m = 8 имеем Мах | Δ К(t)| = 127, т. е. 0≅ | Δ K(t) | ≅ 127. Напряжение U1(t), величина и знак которого могут изменяться дискретно во времени с периодичностью (Qs+5)/fсч, подается на вход интегратора 29. На выходе последнего напряжения Uп2(t) - суть порог для второго компаратора 30 - изменяется во времени в зависимости от знака и модуля напряжения U1(t), действующего на входе интегратора 29. Постоянная времени интегрирования в интеграторе 29 обычно выбирается существенно большей времени счета ложных тревог во втором счетчике 31 импульсов в каждом из циклов счета. Поэтому в установившемся режиме автонастройки (если в цикле счета имеет место сохранение величин σш = const и f* = const) система стремится к выполнению условия равновесия t tустΔK(t)= 0, при наступлении которого среднее значение частоты ложных тревог
tустΔK(t)= 0, при наступлении которого среднее значение частоты ложных тревог  удовлетворяет равенству:
удовлетворяет равенству:
 =
=  =
=  Считается, что в течение времени tуст значения
Считается, что в течение времени tуст значения  и f* остаются неизменными. В пределе время установления tуст ≅ TΣ определяет предел быстродействия локатора по скорости сканирования по угловым координатам. Стремление снизить время установления tуст приводит к выводу о необходимости увеличения частоты ложных тревог fтл2, т. е. к снижению порога Uп2.
и f* остаются неизменными. В пределе время установления tуст ≅ TΣ определяет предел быстродействия локатора по скорости сканирования по угловым координатам. Стремление снизить время установления tуст приводит к выводу о необходимости увеличения частоты ложных тревог fтл2, т. е. к снижению порога Uп2.
Выражение (3) может быть решено подстановкой в него заданного значения fлт1, измеренного значения f* и рассчитанного значения . Полагая в первом приближении, что f*≃ Δfпч/
. Полагая в первом приближении, что f*≃ Δfпч/ , имеем окончательно:
, имеем окончательно:
Uп1= U (8)
(8)
Поскольку все входящие в выражение (8) величины определены, то микропроцессор 35 через интерфейс 34 выставляет на информационный вход цифроаналогового преобразователя 44 соответствующий код К*, явное выражение для величины которого равно
K*= (2m-1) (9) где m - число двоичных разрядов в цифроаналоговом преобразователе 44, который идентичен преобразователю 28, но работает не в четырехквадрантном режиме, а в режиме одноквадрантном, т. е. на его выходе напряжение Uп1 знакопостоянно и может изменяться в пределах 0 ≅ Uп1 ≅ Uo, где Uo - опорное напряжение от источника 27 опорного напряжения, подаваемое на второй вход цифроаналогового преобразователя 44.
(2m-1) (9) где m - число двоичных разрядов в цифроаналоговом преобразователе 44, который идентичен преобразователю 28, но работает не в четырехквадрантном режиме, а в режиме одноквадрантном, т. е. на его выходе напряжение Uп1 знакопостоянно и может изменяться в пределах 0 ≅ Uп1 ≅ Uo, где Uo - опорное напряжение от источника 27 опорного напряжения, подаваемое на второй вход цифроаналогового преобразователя 44.
U1(t) = pUo(Кo - K(t), где p - коэффициент пропорциональности, равный p = 1/2m-1; m - число рабочих двоичных разрядов первого цифроаналогового преобразователя 28, работающего в режиме четырехквадрантного умножающего преобразователя. Разрядность m определяет верхний предел модуля кода разности Мах | ΔК(t)| линейной зоны цифроаналогового преобразования. Так, при m = 8 имеем Мах | Δ К(t)| = 127, т. е. 0≅ | Δ K(t) | ≅ 127. Напряжение U1(t), величина и знак которого могут изменяться дискретно во времени с периодичностью (Qs+5)/fсч, подается на вход интегратора 29. На выходе последнего напряжения Uп2(t) - суть порог для второго компаратора 30 - изменяется во времени в зависимости от знака и модуля напряжения U1(t), действующего на входе интегратора 29. Постоянная времени интегрирования в интеграторе 29 обычно выбирается существенно большей времени счета ложных тревог во втором счетчике 31 импульсов в каждом из циклов счета. Поэтому в установившемся режиме автонастройки (если в цикле счета имеет место сохранение величин σш = const и f* = const) система стремится к выполнению условия равновесия t
Выражение (3) может быть решено подстановкой в него заданного значения fлт1, измеренного значения f* и рассчитанного значения
Uп1= U
Поскольку все входящие в выражение (8) величины определены, то микропроцессор 35 через интерфейс 34 выставляет на информационный вход цифроаналогового преобразователя 44 соответствующий код К*, явное выражение для величины которого равно
K*=
Выбор опорного напряжения Uo в источнике 27 опорного напряжения должен производиться на основе проверки получения предельно возможных значений пороговых уровней Uп1 при вариации в заданных пределах величин  и f* при заданных величинах всех других констант.
и f* при заданных величинах всех других констант.
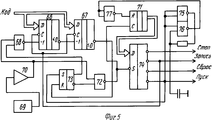
Интерфейс 34 (фиг. 6) является устройством сбора и трансляции в микропроцессор 35 информации об обнаружении локатором объекта, его радиальной скорости и угловых координатах (старший приоритет). Кроме того, интерфейс 34 осуществляет сбор и трансляции в микропроцессор 35 данных с двух параллельно работающих каналов автоматики вычисления полосы шумов и полосы пропускания в усилителе 20, а также автоматики решения задачи о настройке порога ограничения в первом компараторе 22, причем переработанная по соответствующей программе в микропроцессоре 35 информация с указанных каналов возвращается в них же в качестве соответствующих управляющих сигналов (установки требуемой полосы пропускания Δ fпч и установки требуемого порога Uп1). Под управлением микропроцессора 35 через интерфейс 34 передаются управляющие сообщения в блок 43 управления приводом локатора, который управляет приводом 42 сканирования, т. е. определяет необходимый режим поиска по угловым координатам (могут задаваться режимы кругового сканирования, сканирования в заданном секторе, различные угловые скорости сканинга и т. д. ). Наконец, микропроцессор 35 через общую шину 41, входящую в интерфейс 34, может сообщаться с периферийными устройствами: накопителем 36 информации, дисплеем 37 и принтером 38, а также иными внешними устройствами, совместимыми с общей шиной 41. Эти связи являются, как правило, двунаправленными. Интерфейс 34 осуществляет стыковку микропроцессора 35 с названными устройствами с помощью входящих в его состав контроллеров.
На фиг. 6 входные и выходные шины помечены цифрами тех узлов и блоков основной схемы локатора (фиг. 1), к каким эти шины относятся. Так, с выхода анализатора 39 кратковременной стабильности частоты аналоговый сигнал U( δ ν ) поступает на интегратор интерфейса 78, выходом подключенный к устройству 79 выборки-хранения (УВХ), откуда подается дискретно во времени на аналого-цифровой преобразователь 80 (АЦП) и далее поступает на первое устройство 81 ввода/вывода (УВВ), связанное с общей шиной 41. Обработанная микропроцессором 35 информация через общую шину 41, УВВ 81 поступает в коде на цифроаналоговый преобразователь 82, с выхода которого снимается управляющее напряжение Uупр(Δ fпч), воздействующее на второй вход полосового усилителя 20 с регулируемой полосой пропускания. Прохождение сигнала с входа на общую шину 41 синхронизируется с помощью синхронизатора 83, которым определяется период тактирования (время интегрирования входного аналогового напряжения, моменты записи в УВХ и цикличность аналого-цифрового преобразования).
С выхода интегратора 29 напряжение Uп2(t) поступает на вход связанного с другим УВВ 84 другого аналого-цифрового преобразователя 85, а далее через общую шину 41 с микропроцессором 35. Кроме того, с выхода цифрового блока 33 сравнения код разности Δ К(t) поступает также на соответствующий регистр УВВ 84, и под управлением микропроцессора эти коды входят в расчетные соотношения, вычисляемые микропроцессором. Результаты вычислений по программе из микропроцессора 35 через общую шину 41 и УВВ 84 поступают на соответствующие буферные регистры 86-88, соответственно задающие коды Qs, Ko, K*. В качестве общего внешнего диспетчера применяется блок 89 арбитра, синхронизированный от синхронизатора 83. Под управлением этого блока осуществляется трансляция информации с различных каналов в микропроцессор 35 и обратно.
Устройство ввода анализатора 90 (УВА) подготавливает прием данных о факте обнаружения объекта (с выхода второго элемента 26 задержки) и о коде частоты fc сигнала биений на выходе фотоприемного устройства 6 (с выхода первого регистра 24).
Контроллер управления приводом 91 (КУП) осуществляет операции двунаправленного обмена кодовой информацией - принимает данные об угловых координатах обнаруженного объекта и посылает на блок 43 управления приводом кодовые команды на режимы углового сканирования.
Микропроцессор 35 связан с накопителем 36 информации через общую шину 41 и контроллер прямого доступа к ОЗУ 92 и контроллер накопителя 93 на магнитном диске. Через контроллер дисплея 94 микропроцессор 35 связан с дисплеем 37 с клавиатурой. Наконец, микропроцессор 35 передает данные на печать и графику на принтер 38 через контроллер принтера 95 (КП) и контроллер графического принтера 96 (КГП) - графопостроителя. Работа этих контроллеров диспетчеризируется со стороны блока арбитра 89, которому также сообщаются все сигналы, исходящие от микропроцессора 35 при его работе по программе. Последняя записывается через дисплей (при подготовке программы и ее редактировании) в накопитель 36 информации, к которому обращается микропроцессор 35 после инициализации его состояния. Результаты текущих измерений, а также данные статистической обработки массивов для случайных величин (первый, второй, третий и четвертый статистические моменты) отображаются по командам микропроцессора 35 на принтере 38. Всякие изменения в программе и по вводу исходного задания проводятся по прерываниям с клавиатурой дисплея 37.
Claims (1)
- АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР, содержащий передающий лазер с передающим телескопом, гетеродинный лазер, оптически соединенный отражателями с фотоприемным устройством, которое также оптически соединено с приемным объективом, дополнительный фотодетектор, оптически соединенный системой полупрозрачных пластин и отражателем с передающим и гетеродинным лазерами и выходом соединенный через блок автоподстройки частоты с пьезокорректором гетеродинного лазера, последовательно соединенные синхронизатор, генератор линейно-частотно-модулированных колебаний, смеситель, согласующий усилитель и дисперсионную линию задержки, последовательно соединенные амплитудный детектор, первый компаратор, первый счетчик импульсов и первый регистр, а также последовательно соединенные между выходом первого компаратора и вторым входом первого счетчика импульсов первый и второй элементы задержки, выход первого из которых соединен с вторым входом первого регистра, к третьему входу первого счетчика импульсов подключен выход синхронизатора, второй выход которого подсоединен к четвертому входу первого счетчика импульсов, двунаправленно соединенные привод сканирования и блок управления приводом, а также регистрирующий блок, отличающийся тем, что, с целью увеличения дальности действия локатора, в него введены цифроаналоговый преобразователь, анализатор кратковременной стабильности частоты, таймер, полосовой усилитель и последовательно соединенные источник опорного напряжения, дополнительный цифроаналоговый преобразователь, интегратор, второй компаратор, второй счетчик импульсов, второй регистр и цифровой блок сравнения, второй вход которого соединен с первым выходом регистрирующего блока, выход - с его первым входом и с вторым входом дополнительного цифроаналогового преобразователя, первый вход которого соединен с вторым входом регистрирующего прибора, вход анализатора кратковременной стабильности частоты подключен к выходу дополнительного фотодетектора, а его выход - к третьему входу регистрирующего блока, четвертый вход которого соединен с выходом интегратора, выход источника опорного напряжения подключен к второму входу цифроаналогового преобразователя, выход второго элемента задержки - к пятому входу регистрирующего блока, шестой вход которого подключен к выходу первого регистра, седьмой вход - к входу блока управления приводом, второй выход - к второму входу цифроаналогового преобразователя, а третий выход - к входу полосового усилителя, выход которого через амплитудный детектор соединен с вторым входом второго компаратора, при этом выходы таймера соединены с остальными входами второго счетчика импульсов, выход таймера соединен с вторым входом второго регистра, а выход цифроаналогового преобразователя с вторым входом первого компаратора.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SU4853357 RU2012013C1 (ru) | 1990-07-24 | 1990-07-24 | Адаптивный лазерный доплеровский локатор |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SU4853357 RU2012013C1 (ru) | 1990-07-24 | 1990-07-24 | Адаптивный лазерный доплеровский локатор |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2012013C1 true RU2012013C1 (ru) | 1994-04-30 |
Family
ID=21528819
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| SU4853357 RU2012013C1 (ru) | 1990-07-24 | 1990-07-24 | Адаптивный лазерный доплеровский локатор |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2012013C1 (ru) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2296350C1 (ru) * | 2005-10-03 | 2007-03-27 | Олег Федорович Меньших | Способ локации |
| RU2324199C1 (ru) * | 2006-10-30 | 2008-05-10 | Открытое акционерное общество "Научно-производственный испытательный центр "АРМИНТ" | Электронно-цифровое устройство измерения угловых координат быстро движущихся объектов |
| RU2335785C1 (ru) * | 2006-12-26 | 2008-10-10 | Олег Федорович Меньших | Лазерный доплеровский локатор |
| RU2353901C1 (ru) * | 2007-07-03 | 2009-04-27 | Институт Радиотехники И Электроники Российской Академии Наук (Ирэ Ран) | Дисперсионный лазерный дальномер |
| RU2575766C1 (ru) * | 2014-12-11 | 2016-02-20 | ОАО "Национальный центр лазерных систем и комплексов "Астрофизика" | Лазерный локатор |
| CN111505658A (zh) * | 2020-04-16 | 2020-08-07 | 中国科学院上海天文台 | 一种脉冲群式重复频率可调的激光测距方法 |
-
1990
- 1990-07-24 RU SU4853357 patent/RU2012013C1/ru active
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2296350C1 (ru) * | 2005-10-03 | 2007-03-27 | Олег Федорович Меньших | Способ локации |
| RU2324199C1 (ru) * | 2006-10-30 | 2008-05-10 | Открытое акционерное общество "Научно-производственный испытательный центр "АРМИНТ" | Электронно-цифровое устройство измерения угловых координат быстро движущихся объектов |
| RU2335785C1 (ru) * | 2006-12-26 | 2008-10-10 | Олег Федорович Меньших | Лазерный доплеровский локатор |
| RU2353901C1 (ru) * | 2007-07-03 | 2009-04-27 | Институт Радиотехники И Электроники Российской Академии Наук (Ирэ Ран) | Дисперсионный лазерный дальномер |
| RU2575766C1 (ru) * | 2014-12-11 | 2016-02-20 | ОАО "Национальный центр лазерных систем и комплексов "Астрофизика" | Лазерный локатор |
| CN111505658A (zh) * | 2020-04-16 | 2020-08-07 | 中国科学院上海天文台 | 一种脉冲群式重复频率可调的激光测距方法 |
| CN111505658B (zh) * | 2020-04-16 | 2023-04-07 | 中国科学院上海天文台 | 一种脉冲群式重复频率可调的激光测距方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5742379A (en) | Device and method for electronically measuring distances | |
| JP2909742B2 (ja) | 遅延時間測定装置 | |
| US5054911A (en) | Light wave distance measuring instrument of the pulse type | |
| JPH0277673A (ja) | 時間差の高分解測定装置 | |
| RU2012013C1 (ru) | Адаптивный лазерный доплеровский локатор | |
| SE454554B (sv) | Anordning for utverdering av lengden av en metstrecka medelst loptidsmetning av impulssignaler | |
| US4912519A (en) | Laser speckle velocity-measuring apparatus | |
| EP0295720A2 (en) | Laser speckel velocity-measuring apparatus | |
| JPS5714983A (en) | Control device for starting position of picture recording | |
| WO1991013319A1 (en) | Laser detector system | |
| EP0030369A1 (en) | Distance meter | |
| JPH05323029A (ja) | 光波距離計による測距方法 | |
| RU2007839C1 (ru) | Устройство термокомпенсации кварцевого генератора | |
| US3020540A (en) | Method and device for measuring the speed of an aircraft or the like | |
| SU777639A1 (ru) | Эталон времени и частоты | |
| US4297703A (en) | Telemetry device for tracking radar and radar system comprising such a device | |
| SU1636792A1 (ru) | Устройство дл измерени фазового сдвига | |
| SU1168880A1 (ru) | Способ определени градиента плотности среды с частотной дисперсией | |
| SU656234A2 (ru) | Автоселектор периодической последовательности импульсов | |
| SU1037293A1 (ru) | Устройство дл считывани и измерени геометрических параметров прот женных объектов | |
| SU1173197A1 (ru) | Фотометр с цифровым отсчетом | |
| SU1449923A1 (ru) | Способ определени отклонени частоты от номинального значени | |
| SU1474706A1 (ru) | Устройство дл счета штучных изделий | |
| SU1087851A1 (ru) | Влагомер | |
| SU930154A1 (ru) | Способ измерени изменений фазового сдвига периодических сигналов |