RU2012143786A - Способ определения координат цели в трехпозиционной дальномерной радиолокационной системе - Google Patents
Способ определения координат цели в трехпозиционной дальномерной радиолокационной системе Download PDFInfo
- Publication number
- RU2012143786A RU2012143786A RU2012143786/07A RU2012143786A RU2012143786A RU 2012143786 A RU2012143786 A RU 2012143786A RU 2012143786/07 A RU2012143786/07 A RU 2012143786/07A RU 2012143786 A RU2012143786 A RU 2012143786A RU 2012143786 A RU2012143786 A RU 2012143786A
- Authority
- RU
- Russia
- Prior art keywords
- positions
- target
- change
- speed
- range
- Prior art date
Links
- 230000005855 radiation Effects 0.000 claims abstract 2
Landscapes
- Radar Systems Or Details Thereof (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
Способ определения координат цели в трехпозиционной дальномерной радиолокационной системе, включающий на каждой позиции излучение зондирующих сигналов, прием отраженных от цели сигналов, излученных этой позицией, измерение по принятым сигналам дальности от этой позиции до цели, определение координат цели, отличающийся тем, что на каждой позиции дополнительно измеряют скорости изменения дальности, принимают отраженные от цели сигналы, излученные двумя другими позициями, разделяют принятые сигналы по принадлежности к излучившей их позиции, измеряют по принятым сигналам две суммы дальностей и скорости их изменения от этой позиции до цели и от цели до двух других позиций и три попарные разности дальностей и скорости их изменения от первой, второй и третьей позиций до цели, передают сигналы, соответствующие измеренным значениям дальности и скоростям их изменения, суммы и разности дальностей и скорости их изменения на две другие позиции, измеряют три разности сумм расстояний и скорости их изменения между позициями системы, вычисляют уточненные значения дальности и скорости их изменения от первой, второй и третьей позиций до цели по формулам:где R, R, R- вычисленные значения дальности от первой, второй и третьей позиций до цели соответственно;R, R, R- измеренные значения дальности на первой, второй и третьей позициях соответственно;R, R, R, R, R, R- измеренные значения сумм расстояний на первой, второй и третьей позициях соответственно;R, R, R, R, R, ,R, R, R, R- измеренные значения разности расстояний на первой, второй и третьей позициях соответственно;R, R, R- измеренные значения разности расстояний между второй и третьей, первой и
Claims (1)
- Способ определения координат цели в трехпозиционной дальномерной радиолокационной системе, включающий на каждой позиции излучение зондирующих сигналов, прием отраженных от цели сигналов, излученных этой позицией, измерение по принятым сигналам дальности от этой позиции до цели, определение координат цели, отличающийся тем, что на каждой позиции дополнительно измеряют скорости изменения дальности, принимают отраженные от цели сигналы, излученные двумя другими позициями, разделяют принятые сигналы по принадлежности к излучившей их позиции, измеряют по принятым сигналам две суммы дальностей и скорости их изменения от этой позиции до цели и от цели до двух других позиций и три попарные разности дальностей и скорости их изменения от первой, второй и третьей позиций до цели, передают сигналы, соответствующие измеренным значениям дальности и скоростям их изменения, суммы и разности дальностей и скорости их изменения на две другие позиции, измеряют три разности сумм расстояний и скорости их изменения между позициями системы, вычисляют уточненные значения дальности и скорости их изменения от первой, второй и третьей позиций до цели по формулам:
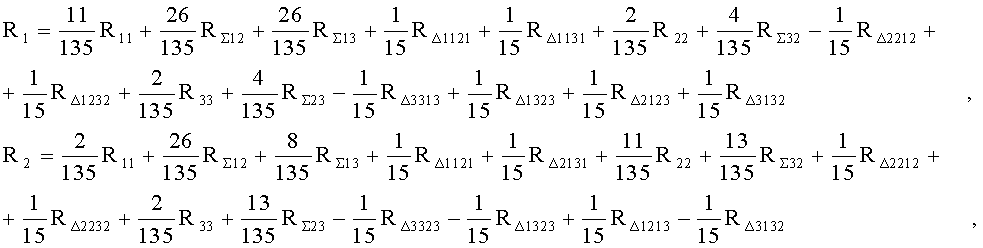
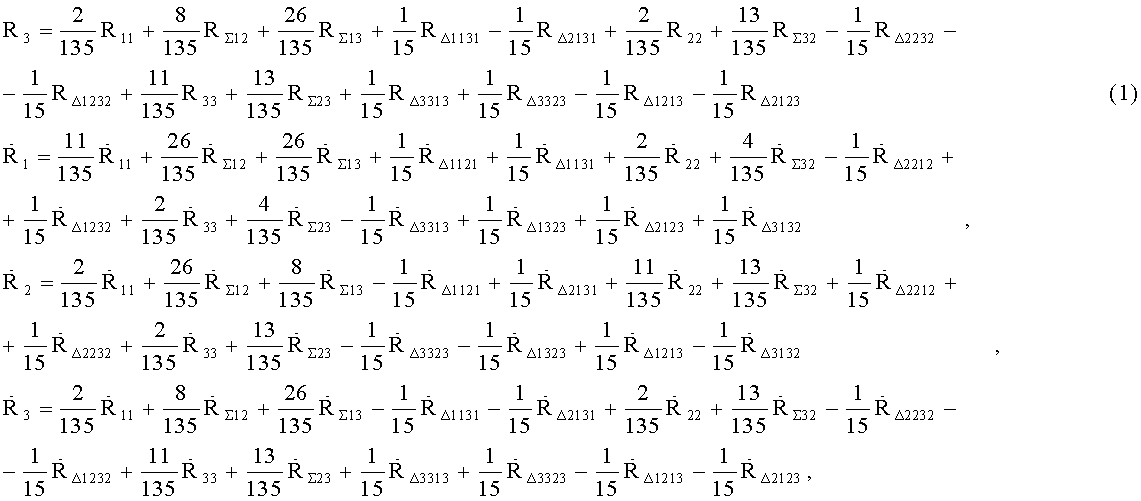 где R1, R2, R3 - вычисленные значения дальности от первой, второй и третьей позиций до цели соответственно;R11, R22, R33 - измеренные значения дальности на первой, второй и третьей позициях соответственно;RΣ12, RΣ13, RΣ21, RΣ23, RΣ31, RΣ32 - измеренные значения сумм расстояний на первой, второй и третьей позициях соответственно;RΔ1121, RΔ1131, RΔ2131, RΔ2212, RΔ2232, ,RΔ1232, RΔ3313, RΔ3323, RΔ1323 - измеренные значения разности расстояний на первой, второй и третьей позициях соответственно;RΔ1213, RΔ2123, RΔ3132 - измеренные значения разности расстояний между второй и третьей, первой и третьей, первой и второй позициями соответственно;RΔ1213, RΔ2123, RΔ3132 - разности сумм расстояний, измеренные между второй и третьей, первой и третьей, первой и второй позициями соответственно;
где R1, R2, R3 - вычисленные значения дальности от первой, второй и третьей позиций до цели соответственно;R11, R22, R33 - измеренные значения дальности на первой, второй и третьей позициях соответственно;RΣ12, RΣ13, RΣ21, RΣ23, RΣ31, RΣ32 - измеренные значения сумм расстояний на первой, второй и третьей позициях соответственно;RΔ1121, RΔ1131, RΔ2131, RΔ2212, RΔ2232, ,RΔ1232, RΔ3313, RΔ3323, RΔ1323 - измеренные значения разности расстояний на первой, второй и третьей позициях соответственно;RΔ1213, RΔ2123, RΔ3132 - измеренные значения разности расстояний между второй и третьей, первой и третьей, первой и второй позициями соответственно;RΔ1213, RΔ2123, RΔ3132 - разности сумм расстояний, измеренные между второй и третьей, первой и третьей, первой и второй позициями соответственно;






















 а координаты цели, скорости их изменения и скорость цели определяют по формулам:
а координаты цели, скорости их изменения и скорость цели определяют по формулам:
 где X, Y, Z - координаты цели в прямоугольной системе координат,
где X, Y, Z - координаты цели в прямоугольной системе координат,


Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2012143786/07A RU2515571C1 (ru) | 2012-10-05 | 2012-10-05 | Способ определения координат цели в трехпозиционной дальномерной радиолоокационной системе |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2012143786/07A RU2515571C1 (ru) | 2012-10-05 | 2012-10-05 | Способ определения координат цели в трехпозиционной дальномерной радиолоокационной системе |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2012143786A true RU2012143786A (ru) | 2014-04-10 |
| RU2515571C1 RU2515571C1 (ru) | 2014-05-10 |
Family
ID=50436001
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2012143786/07A RU2515571C1 (ru) | 2012-10-05 | 2012-10-05 | Способ определения координат цели в трехпозиционной дальномерной радиолоокационной системе |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2515571C1 (ru) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2607639C2 (ru) * | 2014-12-31 | 2017-01-10 | Федеральное государственное бюджетное учреждение "4 Центральный научно-исследовательский институт" Министерства обороны Российской Федерации | Способ определения дальности до объекта с источником излучения сигналов с разными частотами |
| RU2713498C1 (ru) * | 2019-07-19 | 2020-02-05 | Федеральное государственное унитарное предприятие "Ростовский-на-Дону научно-исследовательский институт радиосвязи" (ФГУП "РНИИРС") | Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов |
| RU2717970C1 (ru) * | 2019-10-07 | 2020-03-27 | Федеральное государственное унитарное предприятие "Ростовский-на-Дону научно-исследовательский институт радиосвязи" (ФГУП "РНИИРС") | Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов |
| RU2759198C1 (ru) * | 2020-06-30 | 2021-11-10 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Санкт-Петербургский государственный университет телекоммуникаций им. проф. М.А. Бонч-Бруевича" | Способ определения координат и параметров движения целей в дальномерной многопозиционной радиолокационной системе |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5406291A (en) * | 1993-10-05 | 1995-04-11 | Grumman Aerospace Corporation | Passive emitter location system |
| FR2764074B1 (fr) * | 1997-06-03 | 1999-08-20 | Thomson Csf | Procede et dispositif de radiogoniometrie cooperative en transmission |
| US6768459B2 (en) * | 2002-07-31 | 2004-07-27 | Interdigital Technology Corporation | Method and system for positioning mobile units based on angle measurements |
| RU2309420C1 (ru) * | 2006-02-02 | 2007-10-27 | Военно-космическая академия имени А.Ф. Можайского | Разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство |
| RU2363010C2 (ru) * | 2007-06-06 | 2009-07-27 | Военно-космическая академия имени А.Ф. Можайского | Дальномерно-разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство |
| RU2382378C1 (ru) * | 2008-06-05 | 2010-02-20 | Государственное образовательное учреждение высшего профессионального образования "Военно-космическая академия имени А.Ф. Можайского" | Разнесенный разностно-дальномерный пеленгатор |
| FR2940462B1 (fr) * | 2008-12-23 | 2012-01-20 | Thales Sa | Procede de localisation par estimation multi-voies des tdoa et fdoa des multi-trajets d'une source avec ou sans aoa |
-
2012
- 2012-10-05 RU RU2012143786/07A patent/RU2515571C1/ru active IP Right Revival
Also Published As
| Publication number | Publication date |
|---|---|
| RU2515571C1 (ru) | 2014-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3540464A3 (en) | Ranging method based on laser radar system, device and readable storage medium | |
| WO2017149526A3 (en) | A method and apparatus for cooperative usage of multiple distance meters | |
| RU2013135115A (ru) | Ручной лазерный дальномер | |
| GB2504432A (en) | Laser tracker that combines two different wavelengths with a fiber-optic coupler | |
| CN103376447B (zh) | 一种实现非合作双多基地雷达目标三维定位的方法 | |
| RU2695807C1 (ru) | Способ определения координат движущегося объекта по дальностям | |
| WO2015156873A3 (en) | Methods and apparatus for determining angle of arrival (aoa) in a radar warning receiver | |
| RU2624461C1 (ru) | Способ определения координат объекта | |
| NZ623023A (en) | Apparatus for measuring the position of a vehicle or a surface thereof | |
| EP2827170A3 (en) | Method and system for determining position and orientation of a measuring instrument | |
| CN103017682A (zh) | 一种测距仪测量大型结构几何形状的方法 | |
| RU2012143786A (ru) | Способ определения координат цели в трехпозиционной дальномерной радиолокационной системе | |
| PL434861A1 (pl) | Sposób i urządzenie do mierzenia prędkości pojazdu | |
| CN105467363A (zh) | 一种基于可见光的三角定位系统及方法 | |
| RU2457505C2 (ru) | Устройство для определения местоположения работающей радиолокационной станции | |
| ITTO20120312A1 (it) | Sistema di misurazione di un pallonetto | |
| RU2687057C1 (ru) | Способ определения координат движущегося объекта | |
| RU2010108596A (ru) | Способ определения дальности до поверхности земли | |
| RU2012111879A (ru) | Способ определения местоположения источника радиоизлучения | |
| SE0201818D0 (sv) | Sätt att genom bistatiska mätningar med från mål spridda signaler bestämma lägen för målen | |
| RU2012141572A (ru) | Способ определения координат источника радиоизлучения-постановщика ответной помехи и способ определения координат целей, облучаемых постановщиком ответной помехи | |
| RU2011119863A (ru) | Способ определения координат цели в трехпозиционной дальномерной радиолокационной системе | |
| RU2005114045A (ru) | Способ определения координат источника радиоизлучения (варианты) и радиолокационная станция для его реализации | |
| RU2010143468A (ru) | Способ лазерной локации | |
| RU2015125858A (ru) | Способ определения местоположения стрелка по звуку выстрела |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20181006 |
|
| NF4A | Reinstatement of patent |
Effective date: 20211101 |