RU2101152C1 - Манипулятор для индукционной наплавки - Google Patents
Манипулятор для индукционной наплавки Download PDFInfo
- Publication number
- RU2101152C1 RU2101152C1 RU96107838A RU96107838A RU2101152C1 RU 2101152 C1 RU2101152 C1 RU 2101152C1 RU 96107838 A RU96107838 A RU 96107838A RU 96107838 A RU96107838 A RU 96107838A RU 2101152 C1 RU2101152 C1 RU 2101152C1
- Authority
- RU
- Russia
- Prior art keywords
- rotator
- manipulator
- lifting
- trolley
- carriage
- Prior art date
Links
- 230000006698 induction Effects 0.000 title claims description 5
- 230000007246 mechanism Effects 0.000 claims abstract description 21
- 238000011089 mechanical engineering Methods 0.000 abstract description 2
- 238000010276 construction Methods 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 238000009434 installation Methods 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 3
- 239000004020 conductor Substances 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000005266 casting Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
Images
Landscapes
- Manipulator (AREA)
Abstract
Изобретение относится к машиностроению, в частности к устройствам, предназначенным для упрочнения или восстановления индукционно-металлургическим способом различных поверхностей крупногабаритных деталей и узлов сложной конфигурации. Сущность изобретения заключается в том, что манипулятор выполнен в виде опорной тележки 1, которая снабжена кареткой 2, установленной на ее раме с возможностью возвратно-поступательного перемещения во взаимно перпендикулярных направлениях. Поворотный стол 3 каретки с жестко закрепленными на нем стойками 4, 5 оснащен вращателем 6 с механизмом его подъема. Последний представляет собой две связанные между собой винтовые передачи 26 и 27, имеющие привод и размещенные в упомянутых стойках. Винтовые передачи кинематически связаны с ползунами 29, несущими ложемент вращателя 6. Кроме того, вращатель 6 манипулятора снабжен приводом вращения и механизмом наклона. Тележка 1 выполнена с дополнительными колесами с подъемными механизмами для подъема их или опускания в зависимости от направления перемещения тележки. 3 з.п. ф-лы, 9 ил.
Description
Изобретение относится к машиностроению, в частности к устройствам, предназначенным для упрочнения или восстановления индукционно-металлургическим способом различных поверхностей деталей железнодорожного транспорта.
Известна установка для наплавки деталей, содержащая поворотный стол с центральной неподвижной стойкой, приводом поворота и позиционным фиксатором, литейную форму и нагреватель ТВЧ, причем поворотный стол снабжен вертикальными площадками, имеющими зажимы для закрепления деталей и кондуктор корректировки положения направляемой детали. Кроме того, кондуктор, нагреватель ТВЧ и литейная форма размещены последовательно под каждой из вертикальных площадок и каждый из этих узлов имеет привод подъема [1]
Недостатком известного устройства является сложность конструкции, включающей множество механизмов по наполнению литейных форм, их выбивки, регенерации смеси и других приспособлений, сопутствующих литейному производству.
Недостатком известного устройства является сложность конструкции, включающей множество механизмов по наполнению литейных форм, их выбивки, регенерации смеси и других приспособлений, сопутствующих литейному производству.
За прототип выбрана наплавочная установка типа, содержащая манипулятор с двумя приводами вращения и наклона шпинделя с планшайбой, тележку с приводами вертикального и продольного перемещения, заднюю бабку с пружинным центром, размещенную также, как и манипулятор, на станине. Кроме того, установка включает наплавочный аппарат А-389 и стол для наплавки плоских деталей, на котором закреплена подвижная плита. Недостатком установки является ее громоздкость, она занимает большие производственные площади, имеет много механизмов и узлов. Восстановление крупногабаритных изделий сложной конфигурации с многообразием поверхностей наплавки потребует множества технологических операций, а соответственно и дополнительного оборудования, что приведет к значительным затратам времени и снизит производительность наплавки.
Цель изобретения состояла в разработке конструкции устройства, позволяющего с высокой производительностью осуществлять наплавку крупногабаритных изделий сложной конфигурации.
Поставленная цель достигается тем, что в известном манипуляторе для индукционной наплавки, включающем тележку, поворотный стол с приводами поворота, подъема и механизмом фиксации изделия, тележка снабжена кареткой, установленной на ее раме с возможностью возвратно-поступательного перемещения во взаимно перпендикулярных направлениях, а поворотный стол каретки с жестко закрепленными на нем стойками оснащен вращателем с механизмом его подъема, причем последний представляет собой две связанные между собой винтовые передачи, имеющие привод и размещенные в упомянутых стойках, при этом винтовые передачи кинематически связаны с ползунами, несущими ложемент вращателя.
Кроме того, вращатель снабжен приводом вращения, гильза которого шарнирно связана с планшайбой вращателя и механизмом наклона изделия в обе стороны от горизонта посредством винтовой тяги, установленной на раме ложемента с возможностью подъема и опускания.
При этом тележка имеет дополнительные колеса, которые снабжены подъемными механизмами для подъема их или опускания в зависимости от направления перемещения тележки.
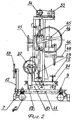
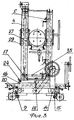
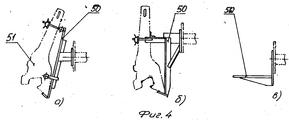
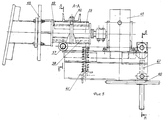
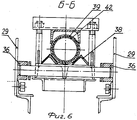
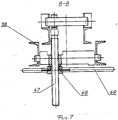
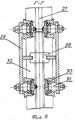
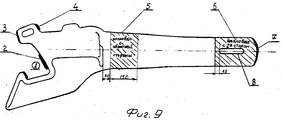
На фиг. 1 изображен общий вид манипулятора для индукционной наплавки; на фиг. 2 манипулятор, вид прямо; на фиг. 3 то же, вид сбоку; на фиг. 4 а,б,в возможные технологические установки изделия на манипуляторе посредством навесных съемных приспособлений; на фиг. 5 разрез А-А на фиг. 3; на фиг. 6 - разрез Б-Б на фиг. 5; на фиг. 7 разрез В-В на фиг. 5; на фиг. 8 разрез Г-Г на фиг. 2; на фиг. 9 вариант наплавляемого изделия автосцепки с указанием наплавляемых поверхностей.
Манипулятор для индукционной наплавки состоит из опорной тележки 1, на которой установлена с возможностью двух возвратно-поступательных перемещений каретка 2 с поворотным столом 3. На последней жестко закреплены стойки 4, 5, несущие с возможностью вертикального перемещения вращатель 6 (см. фиг. 1-3). Опорная тележка 1 имеет основные 7 и дополнительные 8 колеса, которые снабжены подъемными механизмами 9, позволяющими поднимать или опускать колеса в зависимости от направления перемещения тележки (см. фиг. 1).
Каретка 2 выполнена из сварной рамы 10, жестко связанной с винтовой передачей 11, регулируемой через цепную передачу 12 маховиком 13. При этом опорные катки 14 каретки 2 установлены с возможностью возвратно-поступательного перемещения в направляющих швеллерах 15 опорной тележки 1. Кроме того, рама 10 каретки содержит две плиты, одна подвижная 16, а вторая поворотный стол 17, связанные между собой поворотной осью 18 (см. фиг. 1, 3). Подвижная плита 16 установлена в направляющих 19 рамы каретки с возможностью возвратно-поступательного перемещения посредством винтовой передачи 20 на опорных катках 21. Посредством маховика 22 через цепную передачу 23 с помощью винтовой передачи 20 подвижная плита имеет возможность перемещения относительно опорной тележки 1 во втором взаимно перпендикулярном направлении (см. фиг. 1, 3).
Поворотная плита-стол 17 снабжена опорными роликами 24, установленными с возможностью поворота на подвижной плите 16 каретки. Кроме того, поворотная плита 17 зафиксирована относительно подвижной 16 посредством тормоза 25 (см. фиг. 1-3), который выполнен в виде двух винтовых передач 26 и 27 (см. фиг. 8), гайки 28 которых несут ползуны 29. Последние имеют опорные ролики 30, закрепленные на оси 31 с возможностью перемещения по направляющим 32 стоек 4, 5. Привод механизма подъема осуществляется от электродвигателя 33 через редуктор 34. Между собой винтовые передачи 26 связаны цепной передачей 35. Кроме того, к внутренним поверхностям ползуна приварены втулки 36 (см. фиг. 5,6), несущие ось 37. На последней установлен ложемент 38, на котором размещена гильза 39, закрепленная с помощью прижима 40 на раме ложемента. С одной их сторон гильза подпружинена посредством пружины 41. Внутри гильзы закреплена ось 42, жестко связанная с планшайбой 43 вращателя 6. Маховик 44 через червячный редуктор 45 осуществляет поворот оси 42, а вместе с ней и всего вращателя 6 вокруг горизонтальной оси (см. фиг. 2, 3, 5).
Вращатель 6 снабжен механизмом наклона 46 (см. фиг. 2, 5, 7) относительно втулок 36. Он состоит из винтовой тяги 47, гайки 48 и маховика 49, закрепленных на раме ложемента. На планшайбу 43 вращателя 6 с помощью винтов устанавливают навесное приспособление 50 (на фиг. 4 показаны разные модификации приспособлений) для изделия, например автосцепки 51 (см. фиг. 9).
Работа манипулятора осуществляется следующим образом. С помощью кран-балки автосцепку 51 устанавливают в зависимости от восстанавливаемой поверхности (см. фиг. 9) посредством приспособления 50 (см. фиг. 4) на планшайбе 43 вращателя 6 манипулятора. После установки изделия манипулятор разворачивают относительно генератора с индуктором, для чего вручную поворачивают поворотный стол 17 вокруг оси 18 и фиксируют тормозом 25. В зависимости от того, насколько нужно изделие приблизить к индуктору, устанавливают вначале опорную тележку 1 относительно него, для чего используют основные 7 или дополнительные колеса 8, регулируя их посредством подъемного механизма 9. Затем, используя винтовые приводы 11, 19 каретки 2, с помощью маховиков 13, 22 ближе подводим автосцепку 51 к индуктору генератора. После этого с помощью привода 33 включаем механизм подъема 26, который, перемещая ползуны 29 по винтовым передачам 27, устанавливает вращатель 6 на необходимую высоту. Посредством маховика 44 осуществляется поворот вращателя, несущего планшайбу 43 с изделием, выставляя его на заданную поверхность наплавки. Если необходимо, то механизмом наклона 46, посредством маховика 49 устанавливаем обрабатываемую поверхность изделия в рабочий режим под углом 15o (вверх, вниз) в обе стороны от горизонта.
Соблюдая технологическую последовательность при наплавке автосцепки 51 (см. фиг. 9) вначале с помощью приспособления 50 (см. фиг. 4,а), наплавляют поверхности 1-4, а при повороте вращателя 6 посредством маховика 44 с помощью этого же приспособления осуществляют наплавку поверхностей 2-3.
С помощью приспособления (см. фиг. 4,б) наплавляют затылочную поверхность 7 автосцепки 51, для этого манипулятор отводят от генератора, разворачивают на 180o, производят замену приспособления, затем устанавливают изделие, а потом производят установочные манипуляции на устройстве, подводя под индуктор заданную поверхность.
На фиг. 4,в показано приспособление для наплавки буферной тарели. Показанные на фиг. 9 наплавляемые поверхности (упрочняемые или восстанавливаемые) производят также с помощью специальных приспособлений (не показано) и производят с помощью манипулятора технологические операции по наплавке изделия.
Предложенная конструкция манипулятора позволяет широко использовать его в любом производстве, так как она требует малых производственных площадей, а благодаря ее маневренности и многопозиционности технологических операций, достигается высокая производительность наплавки при восстановлении или упрочнении крупногабаритных изделий сложной конфигурации, например деталей узлов железнодорожного транспорта, а именно корпусов автосцепок, буферных тарелей, тяговых хомутов, шпинтонных узлов и т.д.
Claims (4)
1. Манипулятор для индукционной наплавки, включающий тележку, вращатель, состоящий из планшайбы с механизмом фиксации изделия и привода ее поворота, и механизм подъема и наклона вращателя, отличающийся тем, что он снабжен установленной на тележке с возможностью возвратно-поступательного перемещения во взаимно перпендикулярных направлениях кареткой с поворотным столом, стойками, жестко закрепленными на поворотном столе, ползунами и ложементом для вращателя, при этом механизм подъема вращателя выполнен в виде двух кинематически связанных между собой винтовых передач с приводом, размещенных в стойках, ползуны кинематически связаны с винтовыми передачами и на них установлены ложементы для вращателя.
2. Манипулятор по п.1, отличающийся тем, что привод поворота вращателя снабжен гильзой, шарнирно связанной с планшайбой.
3. Манипулятор по п.1, отличающийся тем, что механизм наклона вращателя выполнен в виде винтовой тяги, установленной на ложементе с возможностью подъема и опускания.
4. Манипулятор по п.1, отличающийся тем, что тележка снабжена дополнительными колесами с подъемными механизмами для подъема и опускания в зависимости от направления перемещения тележки.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU96107838A RU2101152C1 (ru) | 1996-04-18 | 1996-04-18 | Манипулятор для индукционной наплавки |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU96107838A RU2101152C1 (ru) | 1996-04-18 | 1996-04-18 | Манипулятор для индукционной наплавки |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2101152C1 true RU2101152C1 (ru) | 1998-01-10 |
| RU96107838A RU96107838A (ru) | 1998-05-20 |
Family
ID=20179632
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU96107838A RU2101152C1 (ru) | 1996-04-18 | 1996-04-18 | Манипулятор для индукционной наплавки |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2101152C1 (ru) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2154562C1 (ru) * | 1999-02-05 | 2000-08-20 | Инженерный центр "Сплав" | Установка для упрочнения индукционной наплавкой |
| RU2250812C1 (ru) * | 2003-08-07 | 2005-04-27 | Федеральное государственное унитарное предприятие Инженерный центр "Сплав" Министерства путей сообщения Российской Федерации (Инженерный центр "Сплав" МПС) | Полуавтомат для упрочнения индукционной наплавкой |
| RU2434734C1 (ru) * | 2010-04-22 | 2011-11-27 | Открытое Акционерное Общество "Российские Железные Дороги" | Манипулятор автосцепки |
| CN103978470A (zh) * | 2014-05-22 | 2014-08-13 | 无锡华联科技集团有限公司 | 多角度变位机 |
| CN104551489A (zh) * | 2013-10-29 | 2015-04-29 | 上海科大重工集团有限公司 | 托辊支架机器人焊接夹具 |
| CN105798517A (zh) * | 2016-05-24 | 2016-07-27 | 南京越辰智能科技有限公司 | 焊接夹具 |
| CN106736216A (zh) * | 2017-01-06 | 2017-05-31 | 南南铝业股份有限公司 | 一种可升降翻转的焊接工装 |
| CN112756853A (zh) * | 2020-12-24 | 2021-05-07 | 广州中设机器人智能装备股份有限公司 | 一种汽车焊接自动化用辅助推送机构 |
-
1996
- 1996-04-18 RU RU96107838A patent/RU2101152C1/ru active
Non-Patent Citations (1)
| Title |
|---|
| 2. Фрумин И.И. Автоматическая электродуговая наплавка. - Харьков: Государственное научно-техническое издательство литературы по черной и цветной металлургии, 1961, с.342 - 346. 3. Таубер Б.А. Сборочно-сварочные приспособления. - М.: Машгиз, 1951, с.324 - 326. * |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2154562C1 (ru) * | 1999-02-05 | 2000-08-20 | Инженерный центр "Сплав" | Установка для упрочнения индукционной наплавкой |
| RU2250812C1 (ru) * | 2003-08-07 | 2005-04-27 | Федеральное государственное унитарное предприятие Инженерный центр "Сплав" Министерства путей сообщения Российской Федерации (Инженерный центр "Сплав" МПС) | Полуавтомат для упрочнения индукционной наплавкой |
| RU2434734C1 (ru) * | 2010-04-22 | 2011-11-27 | Открытое Акционерное Общество "Российские Железные Дороги" | Манипулятор автосцепки |
| CN104551489A (zh) * | 2013-10-29 | 2015-04-29 | 上海科大重工集团有限公司 | 托辊支架机器人焊接夹具 |
| CN104551489B (zh) * | 2013-10-29 | 2017-12-29 | 上海科大重工集团有限公司 | 托辊支架机器人焊接夹具 |
| CN103978470A (zh) * | 2014-05-22 | 2014-08-13 | 无锡华联科技集团有限公司 | 多角度变位机 |
| CN105798517A (zh) * | 2016-05-24 | 2016-07-27 | 南京越辰智能科技有限公司 | 焊接夹具 |
| CN105798517B (zh) * | 2016-05-24 | 2018-06-12 | 南京越辰智能科技有限公司 | 焊接夹具 |
| CN106736216A (zh) * | 2017-01-06 | 2017-05-31 | 南南铝业股份有限公司 | 一种可升降翻转的焊接工装 |
| CN112756853A (zh) * | 2020-12-24 | 2021-05-07 | 广州中设机器人智能装备股份有限公司 | 一种汽车焊接自动化用辅助推送机构 |
| CN112756853B (zh) * | 2020-12-24 | 2021-11-09 | 广州中设机器人智能装备股份有限公司 | 一种汽车焊接自动化用辅助推送机构 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2101152C1 (ru) | Манипулятор для индукционной наплавки | |
| JPH0776797B2 (ja) | 遠隔処理装置用の遠隔操作可能な位置決め兼支持装置 | |
| JP2961618B2 (ja) | 低圧金型鋳込装置 | |
| CA1328897C (en) | Movable platform for construction sites | |
| RU2154562C1 (ru) | Установка для упрочнения индукционной наплавкой | |
| CN207588318U (zh) | 一种用于中置柜板材安装的支撑架翻转机构 | |
| CN109357857B (zh) | 车钩连挂试验系统 | |
| CN117961558A (zh) | 一种高低压配电柜柜体的自动化焊接装置 | |
| CN115324337B (zh) | 一种用于墙体模板的支撑定位装置 | |
| JP2969539B2 (ja) | ガス絶縁主母線の接続装置 | |
| CN212578863U (zh) | 一种立式浇筑轻质隔墙板材自动拆模设备 | |
| CN116460554A (zh) | 一种双电机驱动总成翻转设备 | |
| JP3608711B2 (ja) | 垂直割シェル鋳型のクランプ設備 | |
| RU2080232C1 (ru) | Универсальная установка для обработки колесных пар подвижного состава железных дорог | |
| CN207588319U (zh) | 一种中置柜板材的吸取机构 | |
| KR20010046726A (ko) | 압연라인의 핫 코일 이송용 테이블 롤 교환장치 | |
| CN220372562U (zh) | 一种车厢生产专用底架翻转装置 | |
| CN114535872A (zh) | 一种变位机上下料装置及其使用方法 | |
| NO952983D0 (no) | Mobil platform og anvendelse derav for tilveiebringelse av en simulatorkabin | |
| CN112692756A (zh) | 一种适用于不同形状的汽车钣金件夹持固定装置 | |
| CN219058294U (zh) | 一种铁路铁道建设用轨道搬运装置 | |
| CN223582822U (zh) | 一种电流互感器器身环部主绝缘包扎翻转设备 | |
| CN221607426U (zh) | 一种可调节式电动绕缆装置 | |
| JPH0670957U (ja) | 鋳物の中子砂除去装置 | |
| RU2325291C1 (ru) | Передвижной станок для механической обработки нижних поверхностей крупногабаритных изделий |