RU2247273C2 - Шарнирный четырехзвенный механизм в.и. пожбелко - Google Patents
Шарнирный четырехзвенный механизм в.и. пожбелко Download PDFInfo
- Publication number
- RU2247273C2 RU2247273C2 RU2003110380/11A RU2003110380A RU2247273C2 RU 2247273 C2 RU2247273 C2 RU 2247273C2 RU 2003110380/11 A RU2003110380/11 A RU 2003110380/11A RU 2003110380 A RU2003110380 A RU 2003110380A RU 2247273 C2 RU2247273 C2 RU 2247273C2
- Authority
- RU
- Russia
- Prior art keywords
- driven crank
- rack
- connecting rod
- crank
- driven
- Prior art date
Links
Images



Landscapes
- Transmission Devices (AREA)
Abstract
Изобретение относится к машиностроению и может быть использовано в устройствах для воспроизведения сложных кривых и технологическом оборудовании для фасонной обработки деталей. Механизм содержит ведущий 1 и ведомый 2 кривошипы, шарнирно соединенные посредством шатуна 3, длина которого больше длины каждого из кривошипов. Ведомый кривошип 2 соединен со стойкой 4 упругим устройством 5. Шатун 3 снабжен подвижным ползуном 6 для закрепления на нем рабочего органа, установленным с возможностью перемещения по длине шатуна и последующей фиксации на нем. Технический результат заключается в расширении кинематических возможностей механизма за счет обеспечения движения первого рабочего органа по волнообразной кривой в сочетании с полуокружностью и вращения второго рабочего органа с периодическими, точными остановками. 6 з.п. ф-лы, 7 ил.
Description
Изобретение относится к устройствам вращательного движения для преобразования вращения ведущего вала в требуемый закон движения рабочего органа, а также к механизмам для воспроизведения сложных кривых и может найти применение в машиностроении для фасонной обработки деталей, а также в автоматических линиях и манипуляторах для согласованного привода нескольких рабочих органов.
Известен шарнирный многозвенный механизм Чебышева, звенья которого образуют со стойкой замкнутую кинематическую цепь с разной длиной звеньев, в котором движение одной из точек шатуна по близкой к окружности траектории обеспечивает в этот период приближенную условную остановку рабочего органа [1].
Недостатками известного механизма являются ограниченные кинематические возможности реализации движения по волнообразной поверхности; происходящее во время приближенной остановки осевое перемещение рабочего органа (например, инструмента - сверла, метчика и т.д.) относительно оси детали при ее обработке недопустимо в машинах-автоматах; кроме того, достигается привод только одного рабочего органа.
Известен также шарнирный многозвенный механизм Кардана, содержащий ведущий кривошип, шатун, ползуны и зубчатое колесо, имеющее привод от кривошипа [2].
Недостатками этого механизма являются сложность конструкции и ограниченные кинематические возможности движения рабочего органа только по прямой [2].
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является шарнирный четырехзвенный механизм, содержащий вращающиеся ведущее и ведомое звенья, шарнирно соединенные со стойкой и через шатун между собой, образующие со стойкой замкнутую кинематическую цепь с разной длиной звеньев, в которой рабочий орган соединен с шатуном [3].
Недостатками указанного механизма являются ограниченные кинематические возможности, не позволяющие воспроизводить сложные волнообразные кривые при фасонной обработке деталей и обеспечивать согласованный привод нескольких рабочих органов, в том числе прерывистого движения (требуемого во всех машинах-автоматах).
Цель изобретения - расширение кинематических возможностей за счет обеспечения движения по волнообразной кривой (половина лемнискаты) в сочетании с полуокружностью, а также за счет одновременного привода двух рабочих органов, один из которых вращается с периодическими, точными остановками.
Это достигается за счет того, что противоположно расположенные звенья кинематической цепи механизма выполнены одинаковой длины, шатун сделан большей длины, чем ведущий кривошип, а ведомый кривошип снабжен упругим устройством для его соединения со стойкой и фиксации при сборке механизма в перпендикулярном относительно стойки положении.
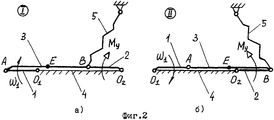
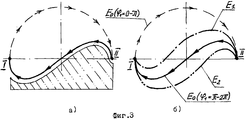
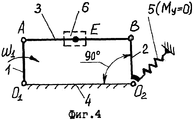
На фиг.1 показана кинематическая схема механизма с упругим устройством в виде пружины растяжения; на фиг.2 даны крайние положения звеньев механизма; на фиг.3 показаны возможные траектории движения рабочего органа при его закреплении в разных точках (Е0, E1, Е2) по длине шатуна (АЕ0=АВ/2; AE1>АВ/2; АЕ2<АВ/2). На фиг.4, 5 и 6 показаны варианты выполнения упругого устройства соединения и фиксации ведомого кривошипа на стойке в виде: торсионного вала (фиг.4), подпружиненной рейки с зубчатым колесом (фиг.5) или двух подпружиненных роликовых толкателей с кулачком (фиг.6). На фиг.7 дана схема механизма с дополнительным приводом периодического поворота с точной остановкой ведомого колеса 11, передающего прерывистое движение на второй рабочий орган (не показан).
Механизм содержит ведущий кривошип 1 и ведомый кривошип 2, шарнирно соединенные непосредственно со стойкой и посредством шатуна 3 между собой и образующие со стойкой 4 замкнутую кинематическую цепь с разной длиной звеньев. Противоположно расположенные звенья цепи выполнены одинаковой длины (O1A=ВO2, АВ=O1O2), шатун 3 сделан большей длины, чем ведущий кривошип 1 (АВ>AO1). Ведомый кривошип 2 снабжен упругим устройством 5, соединяющим его со стойкой и фиксирующим ведомый кривошип при сборке механизма в перпендикулярном относительно стойки положении. Упругое устройство 5 соединения и фиксации кривошипа 2 относительно стойки 4 может быть выполнено в виде: пружины растяжения (фиг 1); торсионного вала (фиг.4); подпружиненной рейки в зацеплении с соосно закрепленным на ведомом кривошипе 2 зубчатым колесом 7 (фиг.5); симметрично расположенных относительно оси вращения ведомого кривошипа 2 подпружиненных упоров в виде двух подпружиненных роликовых толкателей, взаимодействующих с соосно закрепленным на ведомом кривошипе 2 вдоль его длины односторонне выпуклым кулачком 8. Шатун 3 снабжен подвижным ползуном 6 для закрепления на нем рабочего органа с возможностью перемещения по длине шатуна и последующей фиксации в разных его точках (Е0, E1, Е2).
В перпендикулярном относительно стойки положении ведомого кривошипа 2 устройство 5 не создает на нем упругий момент (My=0), а при отклонении звена 2 от указанного нейтрального положения сила от деформации упругого устройства 5 будет создавать на звене 2 относительно точки O2 упругий момент, направленный в разные стороны.
Для обеспечения от ведущего кривошипа 1 привода периодического поворота другого рабочего органа - на ведомом кривошипе в точке С посередине его длины шарнирно установлено зубчатое колесо 9 в зацеплении с двумя другими зубчатыми колесами 10 и 11, выполненными одинакового диаметра. Колесо 10 жестко закреплено на шатуне 3 со стороны ведомого кривошипа, а колесо 11 свободно установлено на оси ведомого кривошипа и кинематически связано с приводом второго рабочего органа (на фиг.7 не показан).
Механизм работает следующим образом.
При вращении ω 1 ведущего кривошипа 1 из крайнего левого положения I (фиг.2, а) в крайнее правое II (фиг.2, б) - растянутая пружина упругого устройства 5 создает на ведомом кривошипе 2 упругий момент (My) в направлении ω 1 и механизм работает по схеме параллелограмма (фиг.1) с движением точки Е шатуна по полуокружности (фиг.3). При дальнейшем вращении ведущего кривошипа 1 в направлении ω 1 растянутая пружина будет создавать на ведомом кривошипе 2 упругий момент (My) в другую сторону, т.е. против ω 1 - в результате этого ведомый кривошип 2 при обратном переходе из крайнего положения II в крайнее положение I будет вращаться в другую сторону относительно ω 1 и механизм превратится в антипараллелограмм с движением точки Е шатуна по волнообразной половине лемнискаты (фиг.3). Перемещая ползун 6 по длине шатуна 3, можно получить как симметричную волнообразную кривую (точка Е0), так и несимметричную (точки E1 и Е2).
Особенностью работы рассматриваемого механизма по схеме параллелограмма (фаза поворота ведущего кривошипа на угол ω 1=0-180° из I из II) является синхронное вращение ведомого кривошипа 2 с той же скоростью ω 2=ω 1 и круговое поступательное движение шатуна 3 с угловой скоростью ω 3=0, в результате чего ведомая шестерня 11 при движении точки Е по полуокружности (фиг.3) будет оставаться абсолютно неподвижной. При дальнейшем повороте ведущего кривошипа 1 на угол φ 1=180° -360° (т.е. обратно из II в I) работа механизма по схеме антипараллелограмма приводит к вращению ведомого кривошипа 2 с переменной угловой скоростью ω 2≠ ω 1, из-за чего возникает скорость шатуна ω 3≠ 0 и вращение ведомой шестерни 11 (в этот период точка Е перемещается по волнообразной половине лемнискаты).
Достигаемый в предлагаемом механизме положительный эффект заключается в расширении кинематических возможностей механизма за счет:
1. Реализации движения рабочего органа по лемнискате в сочетании с полуокружностью (что позволяет производить фасонную обработку волнообразных деталей и регулировку профиля волны (фиг.3, б)) с отводом инструмента из зоны обработки в исходное положение по полуокружности (сечение обрабатываемой детали на фиг.3 заштриховано).
2. Обеспечения согласованного привода периодического поворота дополнительного рабочего органа с продолжительной точной остановкой ведомого колеса 11 в пределах поворота ведущего кривошипа 1 на угол 180° .
Источники информации, принятые во внимание:
1. Боренштейн Ю.П. Исполнительные механизмы со сложным движением рабочих органов. - Л.: Машиностроение, 1973, с. 12, рис. 13 - аналог.
2. Там же, с. 16, рис. 19 - аналог.
3. Озол О.Г. Теория механизмов и машин. Пер. с латыш. /Под ред. Кожевникова С.Н. - М.: Наука, 1984, с. 81, рис. 5.1 - прототип.
Claims (7)
1. Шарнирный четырехзвенный механизм, содержащий ведущий и ведомый кривошипы, шарнирно соединенные непосредственно со стойкой и посредством шатуна между собой и образующие со стойкой замкнутую кинематическую цепь с разной длиной звеньев, отличающийся тем, что противоположно расположенные звенья цепи выполнены одинаковой длины, шатун сделан большей длины, чем ведущий кривошип, ведомый кривошип снабжен упругим устройством для его соединения со стойкой и фиксации при сборке механизма в перпендикулярном относительно стойки положении, а шатун снабжен подвижным ползуном для закрепления на нем рабочего органа, установленным с возможностью перемещения вдоль шатуна и последующей фиксации на нем.
2. Механизм по п.1, отличающийся тем, что упругое устройство выполнено в виде пружины растяжения, шарнирно связывающей ведомый кривошип со стойкой.
3. Механизм по п.1, отличающийся тем, что упругое устройство выполнено в виде торсионного вала, жестко соединенного одним концом с ведомым кривошипом перпендикулярно последнему, а другим концом - со стойкой.
4. Механизм по п.1, отличающийся тем, что упругое устройство выполнено в виде подпружиненной относительно стойки зубчатой рейки в зацеплении с соосно закрепленным на ведомом кривошипе зубчатым колесом.
5. Механизм по п.1, отличающийся тем, что упругое устройство выполнено в виде установленных на стойке подпружиненных упоров, взаимодействующих с ведомым кривошипом в крайних положениях механизма при расположении всех его звеньев на одной линии.
6. Механизм по п.5, отличающийся тем, что расположенные на стойке упоры выполнены в виде двух симметрично расположенных относительно оси вращения ведомого кривошипа подпружиненных роликовых толкателей, поочередно взаимодействующих с односторонне выпуклым кулачком, соосно закрепленным на ведомом кривошипе вдоль его длины.
7. Механизм по п.1, отличающийся тем, что на ведомом кривошипе в точке посередине его длины шарнирно установлено зубчатое колесо, входящее в зацепление с установленными по разные стороны от него двумя другими зубчатыми колесами одинакового диаметра, одно из зубчатых колес одинакового диаметра жестко закреплено на шатуне со стороны ведомого кривошипа, а другое свободно установлено на оси ведомого кривошипа и кинематически связано с приводом второго рабочего органа для обеспечения его периодического поворота.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2003110380/11A RU2247273C2 (ru) | 2003-04-14 | 2003-04-14 | Шарнирный четырехзвенный механизм в.и. пожбелко |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2003110380/11A RU2247273C2 (ru) | 2003-04-14 | 2003-04-14 | Шарнирный четырехзвенный механизм в.и. пожбелко |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2003110380A RU2003110380A (ru) | 2004-11-10 |
| RU2247273C2 true RU2247273C2 (ru) | 2005-02-27 |
Family
ID=35286577
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2003110380/11A RU2247273C2 (ru) | 2003-04-14 | 2003-04-14 | Шарнирный четырехзвенный механизм в.и. пожбелко |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2247273C2 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108438243A (zh) * | 2018-05-21 | 2018-08-24 | 郑州飞机装备有限责任公司 | 一种锁闭及快速解锁驱动机构 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2398990C1 (ru) * | 2009-06-24 | 2010-09-10 | Государственное образовательное учреждение высшего профессионального образования "Петербургский государственный университет путей сообщения" | Ползунно-рычажный механизм |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1368425A (en) * | 1971-09-15 | 1974-09-25 | Secr Defence | Link system comprising a device for taking up backlash |
| SU1629649A1 (ru) * | 1989-01-17 | 1991-02-23 | Государственный Научно-Исследовательский И Проектный Институт Метуллургической Промышленности "Гипросталь" | Рычажно-зубчатый планетарный механизм |
| US5547064A (en) * | 1994-02-08 | 1996-08-20 | Elpatronic Ag | Apparatus for serially transferring objects between two conveyor means |
-
2003
- 2003-04-14 RU RU2003110380/11A patent/RU2247273C2/ru not_active IP Right Cessation
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1368425A (en) * | 1971-09-15 | 1974-09-25 | Secr Defence | Link system comprising a device for taking up backlash |
| SU1629649A1 (ru) * | 1989-01-17 | 1991-02-23 | Государственный Научно-Исследовательский И Проектный Институт Метуллургической Промышленности "Гипросталь" | Рычажно-зубчатый планетарный механизм |
| US5547064A (en) * | 1994-02-08 | 1996-08-20 | Elpatronic Ag | Apparatus for serially transferring objects between two conveyor means |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108438243A (zh) * | 2018-05-21 | 2018-08-24 | 郑州飞机装备有限责任公司 | 一种锁闭及快速解锁驱动机构 |
| CN108438243B (zh) * | 2018-05-21 | 2024-05-24 | 郑州飞机装备有限责任公司 | 一种锁闭及快速解锁驱动机构 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100245960B1 (ko) | 크랭크 기구 | |
| WO2005059407A1 (ja) | 回転伸縮リンク機構 | |
| JP2002005256A (ja) | カム装置およびこれを用いたピックアンドプレース装置 | |
| RU2247273C2 (ru) | Шарнирный четырехзвенный механизм в.и. пожбелко | |
| JP4448554B2 (ja) | 立体カム機構 | |
| US1195665A (en) | Power mechanism | |
| AU714048B2 (en) | Interconnecting mechanism | |
| JPS6213093B2 (ru) | ||
| CN115246130B (zh) | 三自由度关节及其柔性变刚度空间机械臂 | |
| SU1364797A1 (ru) | Шарнирно-рычажный механизм прерывистой подачи | |
| RU2252350C1 (ru) | Зубчато-рычажный механизм с периодическими остановками в.и. пожбелко | |
| RU2003101369A (ru) | Высокомоментный вариатор | |
| RU2229047C1 (ru) | Механизм с выстоями выходного звена | |
| RU2750997C1 (ru) | Кривошипный механизм изменяемой структуры | |
| KR100407854B1 (ko) | 캠장치 및 이것을 이용한 픽 앤드 플레이스장치 | |
| RU2247021C1 (ru) | Устройство типа "рука" для передачи изделий | |
| SU1364804A1 (ru) | Бесступенчата передача | |
| SU757799A1 (ru) | Шарнирно-рычажный пространственный механизм явяча | |
| SU1093403A1 (ru) | Устройство дл получени криволинейных траекторий | |
| RU2770622C1 (ru) | Способ преобразования вращательного движения в поступательное и устройство для его осуществления | |
| RU2613748C2 (ru) | Кривошипно-шатунный механизм | |
| SU1236237A1 (ru) | Механизм дл преобразовани движени | |
| RU59182U1 (ru) | Механизм для преобразования вращательного движения в сложное движение и наоборот | |
| SU968549A1 (ru) | Импульсный вариатор | |
| RU2011076C1 (ru) | Механизм для преобразования вращательного движения в сложное |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20060415 |