RU2264320C2 - Агромашина и способ ее использования - Google Patents
Агромашина и способ ее использования Download PDFInfo
- Publication number
- RU2264320C2 RU2264320C2 RU2003129624/11A RU2003129624A RU2264320C2 RU 2264320 C2 RU2264320 C2 RU 2264320C2 RU 2003129624/11 A RU2003129624/11 A RU 2003129624/11A RU 2003129624 A RU2003129624 A RU 2003129624A RU 2264320 C2 RU2264320 C2 RU 2264320C2
- Authority
- RU
- Russia
- Prior art keywords
- working bodies
- working
- wheels
- agromachine
- drive
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 38
- 238000004519 manufacturing process Methods 0.000 claims abstract description 16
- 230000000694 effects Effects 0.000 claims abstract description 7
- 230000007246 mechanism Effects 0.000 claims abstract description 7
- 239000002689 soil Substances 0.000 claims description 49
- 230000033001 locomotion Effects 0.000 claims description 45
- 238000006243 chemical reaction Methods 0.000 claims description 22
- 230000008569 process Effects 0.000 claims description 22
- 230000008859 change Effects 0.000 claims description 17
- 230000033228 biological regulation Effects 0.000 claims description 14
- 238000005096 rolling process Methods 0.000 claims description 13
- 230000005540 biological transmission Effects 0.000 claims description 10
- 238000012545 processing Methods 0.000 claims description 10
- 238000006073 displacement reaction Methods 0.000 claims description 8
- 239000002184 metal Substances 0.000 claims description 8
- 229910052751 metal Inorganic materials 0.000 claims description 8
- 239000004575 stone Substances 0.000 claims description 8
- 238000009434 installation Methods 0.000 claims description 7
- 238000003973 irrigation Methods 0.000 claims description 6
- 230000002262 irrigation Effects 0.000 claims description 6
- 238000005520 cutting process Methods 0.000 claims description 5
- 230000009931 harmful effect Effects 0.000 claims description 4
- 239000003381 stabilizer Substances 0.000 claims description 4
- QNRATNLHPGXHMA-XZHTYLCXSA-N (r)-(6-ethoxyquinolin-4-yl)-[(2s,4s,5r)-5-ethyl-1-azabicyclo[2.2.2]octan-2-yl]methanol;hydrochloride Chemical compound Cl.C([C@H]([C@H](C1)CC)C2)CN1[C@@H]2[C@H](O)C1=CC=NC2=CC=C(OCC)C=C21 QNRATNLHPGXHMA-XZHTYLCXSA-N 0.000 claims description 3
- 238000004891 communication Methods 0.000 claims description 3
- 238000012423 maintenance Methods 0.000 claims description 3
- 206010013647 Drowning Diseases 0.000 claims description 2
- 230000002401 inhibitory effect Effects 0.000 claims description 2
- 239000000463 material Substances 0.000 abstract description 3
- 239000000126 substance Substances 0.000 abstract description 2
- 238000010586 diagram Methods 0.000 description 48
- 230000006870 function Effects 0.000 description 20
- 230000009471 action Effects 0.000 description 17
- 238000005516 engineering process Methods 0.000 description 14
- 230000006641 stabilisation Effects 0.000 description 12
- 238000011105 stabilization Methods 0.000 description 12
- 230000001105 regulatory effect Effects 0.000 description 11
- 230000002441 reversible effect Effects 0.000 description 11
- 239000000725 suspension Substances 0.000 description 9
- 230000003044 adaptive effect Effects 0.000 description 8
- 241000196324 Embryophyta Species 0.000 description 7
- 230000001687 destabilization Effects 0.000 description 6
- 238000003971 tillage Methods 0.000 description 6
- 238000005056 compaction Methods 0.000 description 5
- 230000001276 controlling effect Effects 0.000 description 5
- 238000009826 distribution Methods 0.000 description 5
- 230000035558 fertility Effects 0.000 description 5
- 239000012530 fluid Substances 0.000 description 5
- 238000003306 harvesting Methods 0.000 description 5
- 230000007935 neutral effect Effects 0.000 description 5
- 238000000926 separation method Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 230000015572 biosynthetic process Effects 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 230000007613 environmental effect Effects 0.000 description 4
- 238000011161 development Methods 0.000 description 3
- 239000000446 fuel Substances 0.000 description 3
- 230000003993 interaction Effects 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 241000219098 Parthenocissus Species 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000001737 promoting effect Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 241000273930 Brevoortia tyrannus Species 0.000 description 1
- 206010061619 Deformity Diseases 0.000 description 1
- 241000826860 Trapezium Species 0.000 description 1
- 241000219094 Vitaceae Species 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 235000021028 berry Nutrition 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000012993 chemical processing Methods 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000001808 coupling effect Effects 0.000 description 1
- 230000009193 crawling Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 229910003460 diamond Inorganic materials 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 239000003337 fertilizer Substances 0.000 description 1
- 235000021021 grapes Nutrition 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000005764 inhibitory process Effects 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 230000009916 joint effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- 238000013178 mathematical model Methods 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000003071 parasitic effect Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000003449 preventive effect Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 238000004513 sizing Methods 0.000 description 1
- 238000009331 sowing Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 235000013311 vegetables Nutrition 0.000 description 1
- 239000010920 waste tyre Substances 0.000 description 1
- 239000002023 wood Substances 0.000 description 1
Images


















Landscapes
- Soil Working Implements (AREA)
- Guiding Agricultural Machines (AREA)
- Agricultural Machines (AREA)
Abstract
Изобретение относится к сельскохозяйственному машиностроению. Сущность изобретения заключается в том, что агромашина содержит механизмы управления, двигатель, ведущее направляющее и самоустанавливающиеся колеса и рабочие органы - заменители ходовой части. Самоустанавливающиеся колеса и/или рабочие органы - заменители ходовой части установлены посредством механических рук с возможностью поворота, фиксации и перемещения приводом в виде гребневой рейки с щеками по бокам или нитевой, или винтовой передачи. Способ использования агромашины включает замену деталей при обслуживании, вождение и регулирование скорости. На агромашину устанавливают элементы из проката и/или авиаутиля, адаптивно изменяют режимы работы и связи механических рук, рабочих органов, колес и приводов и/или переключают энергопотоки с учетом знаков обратных связей. Техническим результатом является повышение уровня унификации, эффективности производства и использования. 2 н. и 17 з.п. ф-лы, 27 ил.
Description
Изобретение относится к сельскохозяйственному машиностроению, к огромашинам, энергетике, экологии, способам повышения биосветотепловодного КПД технологий в земледелии.
Известны мамины и способы их производства и использования в земледелии (А.С. 775348, 862556, 2060614, кл. А 01 В 43/00, А 01 С 9/00). Они содержат двигатель, трансмиссию, ходовую часть, механизмы управления и рабочие органы, связанные с возвратно-поступательным приводом.
Недостатками известных мамин являются недостаточный уровень унификации и корреляционных связей между проблемами.
Цель изобретения - устранение недостатков и повышение эффективности производства и использования.
Основой изобретения является комплексное решение проблем производства, применения, технологий и экологии, повышения готовности.
Поставленная цель достигается тем, что самоустанавливающиеся колеса и/или рабочие органы-заменители ходовой части установлены посредством механических рук с возможностью поворота, фиксации и перемещения приводом в виде гребневой рейки с щеками по бокам или нитевой, или винтовой передачи.
Механические руки и направляющее ведущее колесо установлены с возможностью отбора мощности от электродвигателя или авиадвигателя после отработки ресурса в воздухе до отработки остаточного ресурса на земле.
Рабочие органы выполнены соответственно из прокатных профилей ромбических плугов, отвалов, ножей, дисков, лап, плоскорезов-полос с элементами раскроя, канавками и отверстиями повышения готовности. Механические руки установлены с возможностью поворота и фиксации в режимах широкой колеи или выравнивания рамы, поворота и изменения ширины захвата, перевозки бункеров-контейнеров, привода колес содержат диски и/или катков-заменителей колес рук, катки привода роликового отвала, копирования борозды-минитеррасы на склонах, упор /зацеп/-подъемник, лопастпо-поршневой с роликом и утопителем высокомоментный гидромотор. Кроме того, содержит муфты независимого включения приводов колеса и рабочих органов с возможностью использования одной коробки передач в приводе ходовой части и рабочих органов для изменения скорости и нагрузки вала отбора мощности и использования правил и законов: изменения скорости и повторности выполнения технологических процессов за один проход без дополнительных рабочих органов, изменения разности скоростей бортов с учетом реакций опорной поверхности и курса, отработки сигналов изменения знаков обратных связей при формировании режимов работы.
Производственные, агроэкологические и информационные свойства определяют с учетом вредного воздействия на растения, почву, человека и обществе тормозного режима рабочих органов и эту информацию используют для настройки и управления, оценки качества информации колес и ее повышения разгрузкой колес.
В конце каждого хода рабочие органы проходят вперед, в конце прохода агромашину перемещают в поперечном направлении. Однорукую машину поворачивают нулевым радиусом и возвращают по следу прохода.
У агромашины элементы привода, подачи вперед и подъема рабочих органов соединены /имеют общую линию/ с возможностью переключения потоков энергии, быстрого подъема рабочих органов или подачи замедлением хода около камня и оценки производственных, агроэкологических и информационных свойств с учетом вредного воздействия тормозного режима на растения, почву, человека, общество. Рабочие органы установлены на руке с возможностью снижения избытка и недостатка сил, поперечного перемещения и поворота нулевым радиусом для возвращения по следу прохода, а также ежегодного изменения направления смещения почвы в сторону выравнивания поля без дополнительных рабочих органов или проходов по полю. Рука имеет места установки /крепления/ рабочих органов различным шагом и регулятор хода в виде упора-переключателя для изменения соотношения шага и хода и обработки поля, оставляя канал для полива или сплошной обработки и формирования ровного поля, полосу с террасой, каналом для полива осталяют при шаге, большем хода рабочих органов, ровную обработку ведут при шаге, меньшем хода. Агромашина имеет рабочие органы качения и резания в режимах уравновешивания боковой силы, самоповорота, самоустановки отвала, самовращения ролика, самоуравновешивания роликами, догрузки и разгрузки, регулирования глубины вспашки рабочими органами качения в виде дисков, катков, колес и других средств обработки вращением аналогично качению колеса. Почву обрабатывают ночью при кабельном питании и днем при аккумуляторном питании так, чтобы ночью, в период разгрузки электростанций использовать дешевую энергию /гидростанций/. Регулированием ширины захвата и глубины хода рабочих органов - заменителей колес стабилизируется нагрузка двигателя и ширина захвата агромашины с двигателями различной мощности.
Способ использования машины включает то, что устанавливают элементы из проката и/или авиаутиля, адаптивно изменяют режима работы и связи рук, рабочих органов, колес и приводов, и/или переключают энергопотоки с учетом знаков обратных связей и повышают безопасность работы в режиме робота. Колеса используют в режимах катка-уплотнителя почвы и крошения комков после вспашки, стабилизатора положения на склонах, датчика курса и радиуса поворота. Авиадвигатель и колеса после отработки ресурса в воздухе используют на земле. Электрическое питание машины при обработке земли используют ночью. Избыток и недостаток сил нагрузки колеса снижают и изменяют режимы перемещения руки. Машины различной мощности используют одинаковой шириной захвата и снижают число базовых линий и проходов, а также снижают число шибок при автовождении. Рабочие органы перемещают под углом к горизонтали склона и снижают смещение почвы вниз. Изменяют ход или шаг установки рабочих органов и определяют состояние поверхности поля, сохраняют линии полива и вождения или выравнивают поле. Упор опускают и устраняют движение в сторону нарушения режима работы или остановки и повышают безопасность трогания с места на подъеме. Разность сил рук изменяют в сторону повышения резерва устойчивости движения при ручном или автоматическом вождении /в режиме робота/.
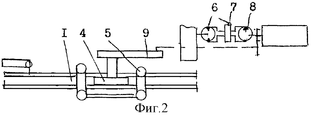
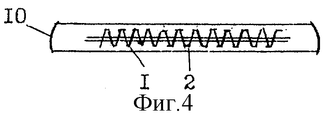
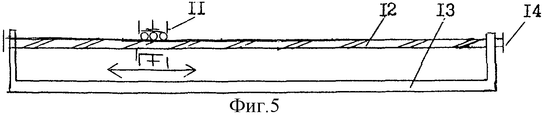
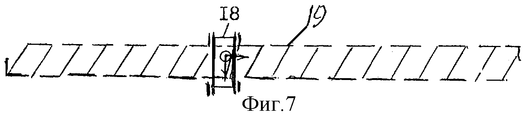
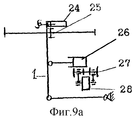
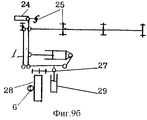
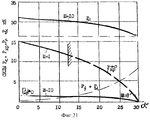
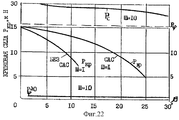
В графической части на фиг.1 изображена схема волновой передачи с гидроприводом; на фиг.2 - схема механического привода рейки; на фиг.3 - схема зубчатой рейки; на фиг.4 - схема гребневой рейки; на фиг.5 - схема шариковой гайки и винта; на фиг.6 - схема нитевой передачи; на фиг.7 - схема гаечно-винтового привода; на фиг.8а - схема гайки и винта; на фиг.8б - схема преобразования движения гайкой и винтом; на фиг. 9а - схема механической руки; на фиг. 9б - схема руки - рычажного привода секций рабочих органов; на фиг. 10а - схема рабочего и транспортного положений рук и их опор; на фиг. 10б - схема расположения опор на склоне; на фиг. 10в - схема расположения опор агромашины-склонохода; на фиг. 10г - схема опор без выравнивания; на фиг.11а - схема действия сил рабочих органов, догружателя (ДВК) и разгружателя ведущих колес (РВК) - догружателя рабочих органов (ДРО), вид сзади; на фиг.11б - схема действия рабочих органов и разгружателя ведущих колес (РВК), в плане; на фиг.11в - схема поперечного движения ведущего колеса и рабочего органа /при поперечном ходе/; на фиг.12 - схема привода колеса-ВОМ через коробку передач, пунктиром показано положение колеса; на фиг.13 - схема энергомодуля с бункером и электроприводом направляющего колеса с возможностью поворота нулевым радиусом; на фиг.14а - схема гидромашины-муфты-насоса-мотора привода рабочих органов; на фиг.14б - схема гидромашины с дозатором-регулятором подачи /расхода/, скорости и момента; на фиг.14в - схема поршня плавного действия; на фиг.14г - схема роликового или шестеренного поршня; на фиг.15а - схема плоскорезов-лап в ведущем, тормозном и нейтральном режимах В, Т, Н, их сопротивлений R, Р и скорости Vp; на фиг.15б - схема плоскореза и лапы с лезвием с двух сторон - поворотного кинжалоподобного рабочего органа; на фиг.15в - схема секции рабочих органов с ограничителями поворота лезвий; на фиг.15г - схема самоустанваливающего ромбического плуга; на фиг.15д - схема ромба-плуга, вид сбоку; на фиг.15е - схема комбинированного плужно дискового и зубчатого камнеуборочного рабочего органа автономного или/и совместного действия на каменистом поле; на фиг.15ж - схема роликового плуга; на фиг.15з - схема роликового плуга, вид при обратном ходе; на фиг.15и - схема плуга с роликом-копиром стенки борозды и приводом роликового зубчатого отвала; на фиг.15к - схема плуга с самоустанавливающимся роликом-отвалом; на фиг.15л - схема плуга с роликами для поочередной работы в режимах отвала и копира борозды; на фиг.15м - схема секции плугов с роликами и ограничителями поворота; на фиг.16 - схема блоков функций агромашины; на фиг.17 - схема функций и корреляционных связей технических средств и процессов; на фиг.18 - схема знаков связей средств и процессов; на фиг.19 - схема связей насоса и подвески с техническими средствами и процессами; на фиг. 20а - схема поворота и поперечного хода на две ширины Ш захвата; на фиг. 20б - схема поворота нулевым радиусом без смещения; на фиг. 20в - схема поворота и движения по полосам; на фиг. 20г - схема фигурного движения; на фиг. 20д - схема фиксированного поворота радиусом, равным половине захвата; на фиг. 21 - зависимость силы на крюке, сопротивлений качению Р+ и подъема Рα и ширины захвата Ш агромашины от угла подъема α; на фиг. 22 - схема влияния угла склона β на движущую Ркр, силу и сопротивление Рс и ширину захвата Ш с и без стабилизатора САС; на фиг. 23 - схема влияния сил колеса и руки, режима агрегата с одним ведущим колесом на мощностной баланс:мощности, теряемые в трансмиссии Nтр, на буксование Nб, качение N+ и расходуемые на тягу Nкр и привод рабочих органов через вал отбора мощности (ВОМ) Nвом при силе Рс и скорости Vр; на фиг. 24 - схема потерь мощности в коробке передач Nк при увеличении силы и скорости, устраняемые агромашиной; на фиг. 25 - схемы прокатов рабочих органов.
Агромашина содержит энергосредство и один из множества вариантов (фиг. 1-14) привода рабочих органов (фиг. 15). В качестве энергосредства служит один из тепловых электрических двигателей. Привод преобразует вращение двигателя, его вала отбора мощности в реверсивное перемещение рабочих органов. В качестве варианта привода служит прокатная волновая или гребневая зубчатая рейка 1 (фиг. 1-4) с рабочими поверхностями 2 с двух сторон и боковинами-щеками 3, которой звездочка 4, направляющие ролики 5, гидромотор 6, распределитель 7 переключения линий насоса 8 упорами сообщают возвратно-поступательное движение. Качающийся редуктор 9 и мостики 10 перевода звездочки на рабочую поверхность обратного хода составляют механический привод. Вариантами привода служат гайка 11 и винт 12, установленный на брусе 13 с зазором 14 предотвращения сжатия винта или шкив 15, и многовитковую нить 16 с пружиной 17 на конце или гайка 18 и винт 19. Винтовая передача (фиг. 8а, б) имеет гайку 20, ролики 21, шпонку 22 винта 23 безредукторного привода рабочих органов со скоростью, определяемой углами подъема α и трения φ. Рычаги с колесами 24 и рабочими органами 25, гидроцилиндром 26, разгружателями 27 /дисками, катками/ колес 28 с гидроцилиндром 29 подачи или без него составляют технологическую машину для энергомодуля с гидравлическим приводом. Соединение рук, реек 1 шарнирами 30 с возможностью привода от колеса допускает поворот нулевым радиусом R=0 при V=0 с поперечным движением и работу на склонах (фиг. 10). Рейки и рычаги 1 из проката без обработки могут преобразовать энергию двигателя в перемещение рабочих органов. Для привода можно использовать гидромашину 6 - муфту, коробку передач 31 (фиг. 12), конические передачи 32, которые допускают поворот колеса и звездочки 33 привода рейки.
Вариант привода от электродвигателя 34 и установка бункера 35 преобразует агромашину в электромобиля, машину с кабельным или аккумуляторным питанием. Гидромашина 6 имеет корпус 36 (фиг. 14 а, б, в, г) с 1 или 2 роликами 37, каналами 38 связи с рабочими объемами около ротора 39, поршней 40, дозатора 41, управляемого рычагом 42. Здесь поршни из пластин 43 или с роликом 44 на оси 45 мягкого взаимодействия с роликами 37 допускают реверс и работу без мертвых зон. К приводу пфиг.оединены рабочие органы для выполнения различных работ.
Систему рабочих органов реверсивного хода и режимного типа дополняют плоскорезы и лапы 43 (фиг. 15) - преобразователи сопротивления R в силу Р с учетом настройки на режим: В - ведущий, Т - тормозной, Н - нейтральный. Поворотная лапа 44 с двумя лезвиями и их секция 45 с ограничителями 45 поворота способна культивировать, подрезать сорняки, убирать выкопочные культуры. Рабочие органы в виде ромба самоустанавливающего плуга 46 на поворотных в двух плоскостях осях 47, зубья для копки камней 48 автономно или в сочетании с дисками 49 и плугами 50 и роликом 51 установлены с возможностью поперечного хода в различных режимах. Плуги 50 с роликами 51 (фиг. 15 ж, з, и, к, л, м), ролик 52 привода отвала - ролика 53 без дополнительного привода крошат почву в различных режимах. Поворотная ось 54 ролика 55 в враианте самоперестановки около однолемешного отсеченного корпуса или двухлемешные корпуса 56 и ролики 57 отдельно или в секции с осями 58 поворота и ограничителями 59 допускают поочередную работу роликов в качестве отвала и копира стенки борозды.
Агромашина содержит и другие известные элементы подвески, управления подъемом рабочих органов и их подачей, регулирования подачи Q (фиг. 16-20), передаточного числа iтр, мощности N силы по сцеплению Pφ с почвой φ силового и позиционного регулирования СПР и использования машины с учетом знаков + и - (фиг. 18, 19).
Важнейшим свойством агромашины служит использование двигателя, колес, гидроагрегатов, отработавших гарантийный срок в авиации, для обработки земли до нулевого ресурса /рискованного срока/. Независимость тяговой силы агромашины от сцепного веса допускает работу без балласта с авиаагрегатами и деталями из дерева и легких металлов. Шины из утиля и колеса малого диаметра без камер, возможность отбора мощности легкого автомобиля соответственно могут изменить структуру технических элементов при изготовлении и использовании унифицированного ряда машин. Вариантом исполнения агромашины является одно ведущее направляющее колесо и опоры рук. Для обработки земли. Такая ходовая часть может быть заменена рабочими органами - разгружателями колес в виде дисков и катков. Установка колес за рабочими органами и их разгрузка преобразует силу тяжести в силу крошения комков и уплотнения вспаханной почвы для регулирования воздушного режима. Допустимо сочетание ведущего направляющего колеса с осью ведущих колес. Такое сочетание колес может повернуть агромашину нулевым радиусом, но устранение ведущей оси с дифференциалом, снижение числа колес, их диаметра при явном достатке движущей силы при обработке земли повышает проходимость, управляемость, устойчивость, экономичность и эффективность использования металла, энергии, земли, ресурса, влаги и времени.
Для выключения колеса от трансмиссии и использования оси колеса для вращения звездочки можно установить муфты. В этом случае агромашина содержит толкатель рабочих органов, включатель привода колеса или ходоуменьшитель. Для подъема и транспортировки агромашина содержит гидроподъемник известного механизма навески или зацеп подъема силой перемещения руки и фиксаторы колес.
Агромашина работает следующим образом. Рейка и рычаг 1, 2 или винт 12, брус 13, нить 16, винт 17, 23 перемещаются возвратно-поступательно соответственно звездочкой 4, гайками 11, 18, 20 и шкивом 15 или гидроцилиндрами 26, перемещают рабочие органы 25 реверсивного хода и выполняют различные работы /свои функции/. Разгружатели 27 /диски, катки/ колес 28 догружают ведущие колеса /ДВК/, при подкатывании разгружают ведущие колеса /РВК / и в каждом режиме фиксируются фиксаторами. Рабочие органы преобразуют в опоры, а опоры в рабочие органы /катки/.
Насос-муфта-мотор-датчик преобразуют вращение в давление и наоборот, вместе с подвеской составляют систему чувствительных и исполнительных элементов, взаимодействие которых с учетом знака связей вводит новые функции управления при использовании. Мощность двигателя передается к рабочим органам через ВОМ или через коробку передач к колесу 28, звездочке 33 рейке 1. Скорость колеса и звездочки регулируются коробкой передач и оптимизируются. Колесо и звездочку можно вкючать и выключать зубчатой муфтой, т.е. привод рабочих органов независим от колеса. После поворота колеса 28 на 90° звездочка 33 перемещает рейку с рабочими органами в поперечном направлении. Колесо в этом режиме отключается от привода или отрывается от земли подкатыванием дисков или катков-разгружателей ведущих колес. В режиме отключения рабочих органов от колеса или опускания на землю поворот колеса в ведущем режиме на 90° обеспечивает нулевой радиус поворота агромашин. Дополнительные колеса рук в режиме самоустановки не мешают повороту нулевым радиусом и поперечному движению /смещению/ агрегата. Общий привод колеса и ВОМ от одной колобки ситуативно снижает радиус колеса, передаточное число и унифицирует агромашину и автомобили. Вариант гидропривода ведущего колеса и рабочих органов гидромашиной /фиг.14/ снижает поток энергии к колесу, вся мощность передается к рабочим органам. В конце каждого хода рабочего органа он проходит вперед на ширину захвата или на отношение ширины захвата к кратности обработки почвы за один проход. Здесь выбор скоростей агрегата и рабочих органов облегчается. Во всех вариантах скорость рабочих органов определяют по качеству и эффективности работы. Скорость движения агромашины определяется по кратности повторения работ до достижения целевого состояния почвы за один проход. Исходя из оптимальной технологической скорости рабочего органа VP, его ширины захвата Шp и длины хода l и кратности повторения работ К скорость определяют, вводят в процессор или регулятор по алгоритму: V=Vp·Шр/Kl.
При непрерывной подаче вкючают низкие скорости, ходоуменьшитель. В таком режиме избыток толкающей силы через колесо с вычетом потерь в трансмиссии подает на вход ВОМ энергию. Механизм поворота гусеничной машины и сама гусеница мешают повороту и требуют установки тормозных рабочих органов. Перевод рабочих органов в нейтральный режим устраняет эти недостатки, но дорогостоящие гусеничные ходовые системы не требуются.
Гидромашина 6 (фиг. 14) работает в режиме насоса, мотора, муфты, делителя потока энергии по известному принципу: при подаче жидкости поршни 40, 43, 45 прижимаются к корпусу 36 и вращают ротор 39. Поршни прижимаются к ролику 37 - утопителю и замыкателю рабочих полостей, проходят и повторяют работу. Ротор одинаково нагружается со всех сторон, уравновешивается и силы дают вращающий момент. При вращении ротора всасивается жидкость поршнями и нагнетается из полостей перед поршнями. Подача и расход изменяются рычагом 42 и дозатором 41.
Перемещение ролика 37 и дозатора 41 изменяет активную длину поршней гидромашины. По мере износа поршни 40, 43, 45 давлением жидкости в центре ротора вытесняются, прижимаются к рабочей поверрхности корпуса 36 - статора и автоматически компенсируется износ, восстанавливается ресурс и КПД. Гидроподжим, регулирование подачи, расхода, скорости и момента, реверсивность, технологичность изготовления, возможность работы в режиме муфты; делителя потока энергии, регулятора скорости, отсутствие колебаний подачи и мертвых точек и зон и другие качества позволяют устранить мосты, редукторы, распределители высокой точности в машине. Сочетание с шестеренными насосами делает вариатор-редуктором. Давление жидкости соответствует нагрузке и обеспечивает управление, силовое регулирование, выглубление рабочих органов при перегрузке, регулирование мощности, исполнение команд, тормозное управление и поворот.
Новая связь между средствами привода, подачи вперед, подъема, реверсирования, регулирования нагрузки и скорости реализуют переключением мощности в конце каждого хода и при встрече с камнем, повышением быстродействия, аварийного управления по давлению. При реализации новых связей совмещение или сочетание функций (фиг. 16, 17, 18) полезно и необходимо оценить технологии, экологию и эргономику функции.
Основой многократного повышения уровня технологий производства элементов без участия человека и дополнительных обработок деталей, а также использования машины рабочие элементы устанавливают в виде проката-профилей реек (фиг. 1-7, 25), ромбоплужков, отвалолистов - трапеций, зубовой полоски, ножей, ободов колес, ножей косилок, прутка граблин, полос дисков, полос лемехов - трапеций, полос лап и плоскорезов и других прокатов высокой готовности.
Множество проходов агрегата по полю, различие направлений движения, трудности получения больших движущих сил, вариация сопротивлений и условий реализации мощности ходовой частью затрудняют автовождение и побуждают к регулированию движущих сил рабочих органов путем изменения режима и степени преобразования сопротивления в силу при низкой скорости движения агрегата, оптимальной скорости перемещения рабочих органов и высокой точности кинематики.
Новому принципу сопутствует переход от распределения и использования опорных реакций колес к распеределению и использованию сопротивлений и их уравновешиванию с учетом курса, обеспечению независимости кинематики и динамики от вариаций опорных реакций, распеределения ведущих моментов между колесами, числа колес и осей типов дифференциалов и ходовых систем без циркуляции паразитной мощности. Здесь сцепные возможности рабочих органов выше, чем у колес и гусениц на один-два порядка. Поэтому массу ходовой части можно снизить многократно без ущерба проходимости и повысить эффективность использования земли и базовых линий. При этом перемещение, подача вперед, реверсирование, защита от перегрузки и управление возможны приводом рабочих органов.
Схема одноклесного аграгата о опорами рук (фиг. 10) при работе /пунктирная/, транспортировке, повороте нулевым радиусом после остановки (V=0, R=0), стабилизации положения рамы на склонах крутизной β облегчает уравновешивание сил Р и сопротивлений дисками. Поперечное движение возможно силой колеса Р и рабочих органов Рс. Скорости агрегата V и рабочих органов Vp зависят от режима работы руки. Снижение увода агрегата колесом-копиром борозды (фиг. 15) повышает точность кинематики.
Это облегчает роботизацию технологий обработки земли.
Известно, что различие работ, траекторий движения, ширины захвата, сопротивлений машин, тяговых сил тракторов, длины агрегатов затрудняет выбор базовах линий, копирование следа и применение автоводителей. Малая ширина захвата, большое число машин и проходов по полю приводят к потерям производительности, энергии и времени, ресурса и точности кинематики, а также работоспособности в режиме робота. Число проходов по полю снижается с повышением ширины захвата и кратности повторения работ.
Многократное снижение скорости движения агрегата при оптимальной технологической скорости перемещения рабочих органов относительно энергомодуля, увеличение и регулирование ширины захвата и движущей силы, а также числа совмещенных операций и повторений работ за один проход без дополнительных рабочих органов снижает число проходов и поворотов до 1-2 в смену. Рядное линейное расположение рабочих органов /малая длина агрегата/ обеспечивает прямые линии заглубления и выглубления плугов и других орудий в начале и конце гона без широких поворотных полос и обезображивания граничных линий.
Исследования кинематики показали, что разворот агрегата возможен следующими способами.
1. Поворот малым или нулевым радиусом и смещением на 1,2 ширины захвата или без смещения энергосредства для движения обратно по следу / а, б, в/ однорукого агрегата.
2. Поворот руки над обработанной поверхностью для обратного хода по следу без смещения энергомодуля или фигурное движение агрегата копированием следа предыдущего прохода.
3. Фиксированный поворот вокруг центра-датчика.
Нулевой радиус поворота снижает холостой ход, площадь поворотных полос и ошибку копирования следа.
Компактное сложение рук облегчает поворот и транспортировку. Отсутствие борозд и гребней повышает качество работы и независимость ширины захвата от тяговой силы и состояния поверхности от направления движения. Приближение рабочих органов к энергомодулю облегчает поворот, повышает мобильность широкозахватных агрегатов. При большой ширине захвата и малом числе проходов легче определить базовую линию, обслуживать 3-4 полуагроробота даже при ручном развороте 1, 2 раза в смену.
Поворот руки, фигурное движение и поворот вокруг центра-датчика кривизны линии, одноосное или бесколесное, или одноколесное движение /а, б/ с подачей вперед, холостое поперечное движение /в/ и подтягивающее или толкающее поперечное движение при минимальном холостом ходе в поле снижает зависимость от влажности и угла склона. Для облегчения решения проблем кинематики и динамики остро необходимо заменить сумму действий колес и рабочих органов многих машин суммой функций рабочих органов одной машины. Это создает условия для перехода от многомашинных технологий к одномашинной, от многоосного энергомодуля к одноосному.
Способность сохранять и изменять направление повышается многократно сцепной силой рабочих органов - разгружателей ходовой части. Одно ведущее направляющее колесо с опорами рук может работать в режимах: поворота нулевым радиусом без сложных трансмиссий, рулевой трапеции, развалов и схождений колес; - разгрузки в поле и догрузки на дороге; - поперечного движения; - катка для дообработки почвы; - привода рабочих органов (после отрыва от земли в режиме "экономичного вала" отбора мощности путем использования коробки передач для регулирования скорости рабочих органов. Движущую силу можно регулировать применением рабочих органов в тяговом, толкающем, технологическом, тормозном, "якорном", следокопирующем режимах, а также гидромотором колеса руки.
Совмещение и сочетание функций затрагивают технологические /фиг. 6/ процессы. Вспашка отвальная, ровная, безотвальная, влажная, плантажная; лущение различное, чизелование, щелование, культивация, формирование грядок и валиков, культурно-технические работы, боронование, посадка и посев, полив, удобрение и защита растений, мелиорация и планировка, уборка урожая, корчевка камней, сорняков, террасирование склонов, разработка мерзлых грунтов, укрытие и открытие лозы и другие работы выгодно выполнять одной машиной. Управление тягово-сцепными свойствами, нагрузкой, догрузкой ведущих колес, регулирование скорости по влажности почвы; снижение скорости, стабилизация, согласование и повороты различные нужно связать с учетом необходимости защиты от буксования колес, уплотнения почвы, засорения, перегрузки и поломки рабочих органов; сползания и столкновения или опрокидывания машины при повороте и в других условиях.
Установлено, что сцепление может регулировать подачу жидкости Q, передаточное число трансмиссии iтр, упругость подвески, мощность двигателя Nе, смазку деталей по нагрузке, нагрузка машин и значения; углов поперечного и продольного поворотов β, α рамы, эластичности привода, потоков энергии. Коэффициентов нагрузки λ, жесткости подъемника орудий, реактивного момента, корректора вертикальных нагрузок (КВН) и движущей силы по сцеплению Рφ. Муфта сцепления может обеспечить разгон, привод, преобразование энергии, деление энергии, подъем орудий, контроль и утилизацию энергии, поворот, торможение автоторможение. Защита от перегрузки, диагностика, отрыв оси и автоторможение для подъема орудия (П) муфтой достигаются проще.
Подвеска машины успешно может служить приводом тормозов, аккумулятором энергии, стабилизатором нагрузки, силовым и позиционным регулятором (СПР), регулятором мощности и нагрузки двигателя, питанием стартера, указателем режима, аварийным питанием тормоза, утилизатором энергии, корректором вертикальных нагрузок (КВН)-разгружателем ведущих колес (РВК), регулятором силуэта, системой автоматической стабилизации (CAC) рамы при повороте и работе на склоне, ограничителем скорости и колебаний нагрузки колес и других элементов. При этом подвеска и насос или объемная муфта взаимосвязаны между собой и с другими элементами соответствующими связями и их выключателями с возможностью общения человека с машиной.
Совмещение и сочетание технологических, кибернетических и преобразующих функций, применение реверсивных рабочих органов, снижающих нагрузку ходовой части и уплотнение почвы, комплексно решает известные и новые проблемы, повышают универсальность, управляемость, производительность адекватно мощности и уровень автоматизации управления. Такое направление включает согласование процессов управления курсом, скоростью движения, нагрузкой в тяговом и тормозном режимах, а также правила комплексного решения технологических, конструктивных и эксплуатационных задач с учетом требований различных зон. Технологические процессы могут выполняться датчиками курса - рабочими органами. Проблемы благоустройства придомовых и пригородных территорий, обработки неудобиц, садов и огородов, выполнения культурно-технических работ легко решаются перемещением рабочих органов относительно легкого энергосредства. При этом лопата бульдозера может перемещать материалы и преобразовать сопротивление в движущую силу, согласовать сопротивление с подъемной силой и обеспечить саморегулирование нагрузки машины и ее элементов /двигателя и ходовой части/.
Совмещение и согласование функций рабочих органов и датчиков курса способствует энерго- и материалосбережению, защите человека, техники и агроэкосистемы при химической обработке виноградников и уборке урожая винограда и ягод других растений. Способ использования агромашины включает сведения о работе и информацию о повышении эффективности. Гибкость функций агромашины требует настройки, соблюдения правил и законов использования агромашины с учетом потребностей технологий высокого уровня, гармонизации энергетических, экологических технологий. Копируя одну базовую линию и оборачивая пласт в одну сторону, почву смещают к одному краю поля и углубляют и расширяют борозду на другом конце. Это полезно для совмещения линий полива, вождения, но в других случаях изменяют направление и возвращают почву на свое место при последующей вспашке. Для устранения потерь энергии на смещение почвы в одну, а затем в обратную сторону, уложить на свое место выгодно получить ровную вспашку с доведением почвы до финишного состояния без дополнительных рабочих органов и их сопротивлений с возможностью снижения массы в два раза, тяговой силы и буксования до нуля. Это устраняет потребность в сложной ходовой части, множестве проходов. Устранение гребня и борозды перемещением большой массы почвы обходится дорого и должно быть заменено ровной вспашкой, малым числом рабочих органов и увеличением на порядок ширины захвата.
Линии движения агрегата и рабочих органов и их скорости отличаются. По мере их приближения из-за их сложения достигают опасного значения. На дорогах при транспортировке скорость ограничивается подвеской /плавностью хода/, радиусом поворота, крутизной склона, условиями дороги, груза и человека. Здесь рабочий орган меняет скорость и останавливается при встрече с камнем, обходит или отходит назад, кинетическая энергия трактора снижается в 10-100 раз, сопротивления рабочих органов противодействуют, уравновешиваются, рабочие органы преобразуются в опоры и средства передвижения, функции колес снижаются. Возможность установки колес за рабочими органами плуга преобразует их в катки для крошения комков, т.е. без уплотнения почвы перед вспашкой, без отрыва колес от земли, регулируя вертикальную нагрузку колес и рабочих органов, преобразует колеса в катки, вредное уплотнение почвы в крошение комков и повышает агротехнический результат, не теряя проходимости использует избыточную движущую силу плуга, дисков, культиватора, корчевателя камней, бульдозера и т.д. Механизм поворота поворачивает колесо и диски-опоры колес. Сцепление дисков многократно превышает силу колес. Поэтому во столько раз повышается и управляемость на склонах, где число дисков превосходит число колес. В любом случае разгрузка, отрыв колеса, перевод в режим катка более полезен, чем движение в режиме колеса. При очень малой массе достаток сил повышает ширину захвата в 10 раз /фиг. 21-24/, снижает зависимость от угла подъема α и крутизны склона β, сопротивлений качения Р+ и подъема Рα рабочего органа Рс и скорости Vр. Это минимизирует потери энергии на получение силы тяги и повышение скоростей движения /составляющих мощности и производительности/. Первоначальный состав функций прототипа и агромашины претерпевает текущие изменения при использовании, в том числе за счет пфиг.оединения новых функций с учетом унификации технических чувствительных и исполнительных элементов. Линейное расположение рабочих органов укорачивает агрегат, устраняет обезображивание краев поля, возникают все условия для перехода от оценки почвы по проходимости к оценке спелости, влаго, время, тепло, структуре, плодородиесбережению, от оценки машины по тяге к оценке эффективности при работе в поле. Потенциал тяговой силы неисчерпаем, т.к. тождественно сопротивлению возрастает.
Основы конструкции, производства и использования агромашины во всех странах составляют следующие новые законы и правила.
1. Минимизации: зависимости работы техники от сил и реакций почвы, силового и тормозного действий колес и рабочих органов; массы; потерь энергии, воды, времени, ресурса, плодородия и урожая; зависимости проходимости и других эксплуатационных качеств от рельефа, влажности и типа энергосредства; управляющих действий; числа типов и стоимости машин; затрат и стоимости продукции земледелия; ограничений мощности, ширины захвата и производительности машин; числа дополнительных обработок земли, базовых линий вождения, проходов по полю; веса ходовой части и буксования; скоростей обработки и движения, длины агрегата и ширины поворотных полос.
2. Повышенно: ширины захвата, движущей силы, полезного сопротивления рабочих органов до машинной силы привода; производительности и рентабельности, совместимости функций технических средств, операций и технологий; эффективности использования металла, ресурса, энергии, земли, влаги, агросроков и условий регионов, а также уровня технологий и техники в земледелии.
3. Преобразования: сопротивления рабочих органов в машинную силу, функций и режимов работы ходовой части и рабочих органов, системы машин в систему режимных рабочих органов; режимов догрузки колес на дорогах в режимы разгрузки и защиты при обработке земли; зависимости производительности машин от их массы и числа проходов по полю; взаимосвязей мощности, скорости, ширины захвата, нагрузки и условий местности.
4. Переориентирования земледелия на использование техники в течение года и повышение светотепловодного КПД операций и машин.
5. Выявления и использования сроков "спелости", свойства "холодоспелости" и эффекта малоэнергозатратности обработки земли без экологической опасности и химической перегрузки.
Переключение обратных связей повышает уровень информационных и исполнительных функций в вариативных внешних условиях.
Отрицательная обратная связь применяется для подачи части выходного сигнала обратным знаком на вход управления-устранения отклонения регулируемого параметра от заданного значения /ошибки/ и стабилизации процессов /режимов работы, положения и т.д./. При этом стоимость изготовления и эксплуатации усилителей руля, автоводителей, регуляторов скорости, сил и положения орудий и др. систем возрастает пропорционально чувствительности и адаптивное управление затрудняется. Положительная обратная связь, подавая часть выходного сигнала на вход управления без изменения знака, способствует усилению отклонения регулируемого параметра, изменению, дестабилизации процесса и нарушению устойчивости.
Научный и практический интерес представляет адаптивное управление на основе сочетания достоинств положительных и отрицательных обратных связей /двух видов/ для стабилизации и дестабилизации процесса до достижения взаимосоответствия параметров на различных целевых уровнях регулирования равновесия. Дело в том, что лавинообразное изменение /дестабилизация / параметра в сочетании со стабилизацией- содействие и противодействие изменению параметра и внешнего влияния придает машине новые - адаптивные свойства.
Для пояснения полезности таких свойств применимо правило сочетаемости двух видов связей для регулирования нагрузки двигателя. При повышении нагрузки, устранении отклонения /ошибки/ и запаздывании действия увеличивают мощность по принципу содействия положительной обратной связью в возможных и допускаемых пределах.
Но это не исключает компенсации влияния изменения нагрузки регулированием скорости: снижая при перегрузке и повышая при недогрузке, как это принято, следвательно, нужен и принцип регулирования скорости по нагрузке отрицательной обратной связью и дестабилизации. Пределы регулирования ограничены технологическим процессом, массой и потерями энергии. Для расширения этих пределов выгодно регулировать сопротивление /нагрузку/, например, изменением глубины почвообработки и подачи в сторну устранения перегрузки и недогрузки - по принципу отрицательной обратной связи.
Процессы регулирования мощности двигателя и нагрузки рабочей машины отличаются знаками обратных связей, следовательно, сочетание двух видов связей выгодно дополняет одно другим. Установлено, что здесь нечувствительность, невозмутимость и высокая чувствительность могут совместиться в энерговозвратном режиме регулирования.
Общеизвестно, что мощность и нагрузка, силы и реакции в разновесном положении равны по значению и противоположны по знаку, т.е. являются внутренними и внешними параметрами, взаимосоответствие которых можно обеспечить на различных энергетических уровнях. Они требуют дестабилизации до некоторого предела, а затем - стабилизации, следовательно, адаптивного управления.
Совместимость и несовместимость связей определяются практической потребностью в стабилизации и полезной дестабилизации - адаптивном и полезном изменении параметра. Практически нарушения процессов исключают различными способами, так как при колебании и запаздывании информации отрицательная обратная связь может частично преобразоваться в положительную и привести к аварийным ситуациям. Слияние двух видов связей может привести к потере управляемости или к воздействию выхода на вход разностью противоположных действий. При преобразовании и усилении сигнала это ведет к потере информации.
Без усилителя и потерь энергии такие связи действуют в зависимости от времени, т.е. приводят к слиянию противоречивой информации и противоположных действий.
Разделение энергопотоков и регуляторов, автономизация действий /содействия и противодействия развитию/, например, изменение мощности и скорости в ряде случаев дает эффект адаптивного управления без дорогостоящих процессоров и регуляторов детектирующего действия, пропускающих сигнал в одном направлении. Детектирующее действие регулятора затрудняет очувствление исполнительных элементов и орудий.
Пропускание сигнала в двух направлениях, сочетание двух видов связей, слияние силового и информационного потоков энергии, а также согласование действий и пртиводействий успешно решает проблемы силового и позиционного регулирования, защиты и догрузки ведущих колес, отрыва ведомой оси от земли, защиты машины, человека и почвы.
Поисковые исследования позволили сформулировать закон целесообразности сочетания видов обратных связей.
Алгоритм регулирования параметров по такому закону можно иллюстрировать математической моделью:
где N,N' - мощность и нагрузка двигателя,
↔ - знак следования без детектирующего действия,
iтр, V - передаточное число и скорость движения,
Gщ, Рφ - силы сцепления и тяги колес,
Ркр - сопротивление орудия, ± - знаки обратных связей.
Здесь закон регулирования параметров таков: мощности - регуляторов топлива, нагрузки - коробкой скоростей, скорости - человеком по качеству технологического процесса, сцепной силы - по силе тяги догружателем ведущих колес, тяговой силы рабочими органами для обработки почвы реализуется легко. При этом допускается регулирование знака и значения силы тяги в различном сочетании параметров: если сочетать по 2, 3, 4, 5 элементов, то число вариантов регулирования превышает практические потребности в 10-100 раз.
Закон такого взаимосогласования сил и сопротивлений орудий при почвообработке снижает расход топлива и металла на 40% и число проходов по полю - в 10-20 раз. На других операциях сила тяги требуется меньше, чем на вспашке и можно регулировать легко.
Рассмотрим один режим работы агрегата подробно. Регулятор изменяет расход топлива /мощность/ пропорционально нагрузке и быстро достигает некоторого предела, затем регулируется передаточное число трансмиссии /скорость, крутящий момент и силу тяги по двигателю / до предела, допускаемого сцепной силой и буксованием. Параллельно увеличиваются сила сцепления и движущая сила. Здесь, очевидно, мощность двигателя имеет известное ограничение и область эффективного регулирования, следовательно, даже двигатели постоянной мощности нуждаются в регулировании передаточного числа. Но скорость движения ограничивается возможностями водителя и автоводителя, качеством выполнения технологического процесса, надежностью работы, буксованием, колебаниями /подвеской/ и т.д. Поэтому сцепная сила регулируется и создается условие для реализации мощности без увеличения числа колес /потребителей энергии/. Повышение числа ведущих колес с 2 до 4 и силы тяги на 12-15% обходится дороже, чем повышение сцепной силы на 60% и силы тяги на 30% с экономией металла и энергии. Еще большую экономию дает изменение знака крюковой силы. Регулирование скорости по качеству работы, минимизация давления на почву и изменение знака крюковой силы указывают на необходимость коррекции и учета условий защиты.
В тормозном режиме алгоритм управления можно характеризовать моделью и очередностью изменения параметров так:
где N, Nу - мощности двигателя и утилизатора,
Pтр, Рт - силы трения и полезного торможения.
В режиме регулирования скоростей бортов V1, V2 по курсу α и ведущих моментов по допускаемым напряжениям τ почвы справедливы модели:
Очевидно, что стабилизационные режимы /отрицательные обратные связи/ выгодно сочетать с режимами содействия параметров, т.е. положительной обратной связью. Полезна положительная обратная связь между элементами согласования сопротивления и догрузки ведущих колес, т.к. снижается буксование увеличением сцепной силы.
Но отрывать этот принцип от формирования курса нельзя, так как работа бортов влияет на траекторию движения и зависит от внешних условий. Поэтому дифференциал должен быть регулятором двух параметров: скорости и ведущего момента в соответствии с курсом и соотношением реакций движителей бортов. Разность скоростей выгодно регулировать по курсу и условиям местности. Отрицательную обратную связь регулятора разности скоростей бортов можно сочетать с положительной обратной связью ведущих моментов и сцепных возможностей движителей. Отклонение от курса устраняется как ошибка, а при отклонении реакций почвы прямо пропорционально им изменяются силы. Взаимосоответствие сил и реакций обеспечивается управляемым по этому закону дифференциалом и принципом сочетания двух видов обратных связей. При этом отрыв переднего моста от земли для догрузки ведущих колес легко сочетается с регулированием угла относительного поворота орудия и трактора.
Ведущие моменты и силы тяги по двигателю нужно регулировать прямо пропорционально реакциям. Для этого можно использовать сигнал датчика курса и разности реакций почвы. Для этого исключены недостатки простого дифференциала путем перехода от простого дифференцирования и его блокирования или повыщения трения к учету курса и реакций почвы, регулированию скоростей с учетом курса с элементами силового и позиционного регулирования. Применением сигнала о накопленной ошибке датчика курса можно облегчить такое управление. В случае нарушения курса различием буксований и реакций почвы можно корректировать сигнал датчика. Это легко осуществляется человеком или датчиком разности сил. Простое переключение обратной связи является эффективным решением задачи. Знак обратной связи колеса-датчика курса и разности сил бортов изменяется при реверсе и переключении режимов /ведущий, ведомый/. Для всех случаев один переключатель рода обратной связи достаточен и необходимость в изменении знака низка.
Весьма полезно сочетать положительную и отрицательную обратные связи для компенсации недостатков работы колеса и подвески бульдозера, т.к. знак влияния упругости рессор на управляемость можно преобразовать и формировать программу регулирования мощности и нагрузки вместе или в отдельности.
Положительная обратная связь повышает надежность работы муфты - регулирования фрикционного момента прямо пропорционально нагрузке, а это исключает остановку гусеничного трактора при отключении одного борта /при повороте/, а также снижает пробуксовку муфт коробки передач колесной машины путем увеличения давления жидкости прямо пропорционально нагрузке.
Закон распределения энергии между бортами по курсу и реакциям почвы применительно к движителям - рабочим органам нужно дополнить правилом согласования скоростей движения и выполнения технологических процессов. Это правило таково: скорость движения рабочего органа определяется по качеству выполнения технологического процесса, влажностью, энергоемкостью и т.д., а скорости бортов - курсом. Когда сопротивление рабочего органа становится тяговой силой, вопрос регулирования сил по реакциям не теряет значимости. Избыток движущей силы, невозможность совмещения операций требует утилизации энергии. Ввиду того, что скорости колес и рабочих органов при почвообработке зависят от технологических требований, кривизны траектории и господствующего принципа регулирования скорости обратно пропорционально нагрузке, нужно перейти к определению скорости по требованиям технологии.
Таким образом, скорость движения трактора должна отличаться от скорости выполнения технологического процесса. Это утверждение подкрепляется законом регулирования сил и сопротивлений рабочих органов до минимизации нагрузки движителей - колес.
Сочетаемость двух видов обратных связей связана с преобразованием, кодированием и получением информации без сложного оборудования. Преобразования изменений нагрузок, ускорений, путей и других параметров без сложных датчиков снижает стоимость изготовления и эксплуатации машин, а предупреждающий эффект снижает запаздывание действий регуляторов и накопление ошибок регулирования. При этом чувствительность элементов машины к изменениям внешних условий /очувствление функциональных блоков/ на основе законов и правил сочетаемости и совместимости технологических и управляющих функций открывает пути улучшению кибернетических свойств машин и социальных свойств /престижности/ труда человека. Эти достоинства трудно перевести в рубли, но улучшение экономических показателей требует комплексного подхода.
Правила использования вариативных связей таковы:
1. Отсутствие системного подхода к принципам регулирования параметров мобильных агрегатов привело к серьезным последствиям; повышению массы и потерь энергии, снижению плодородия почвы; изоляции и дроблению блоков и параметров - торможению работ по автоматизации управления.
2. Стабилизация параметров повышает устойчивость процесса, но снижает пфиг.пособляемость к условиям эксплуатации. Сочетаемость устойчивости с изменчивостью процессов работы агрегата создает основы адаптивного управления.
3. Сочетание положительных и отрицательных обратных связей придает принципам управления новые свойства и полезные качества: изменение знаков обратных связей повышает эффективность адаптивного движения и торможения тогда, когда взаимосоответствие сил и реакций выгодно обеспечить положительной обратной связью.
Лавинообразное изменение параметра даже в пределах стабилизации положения, нагрузки, сил и других параметров повышает быстродействие регулятора и обеспечивает равновесие параметров на различных уровнях - многоцелевую и многоуровневую стабилизацию.
4. Разумное сочетание процессов стабилизации и дестабилизации /положительных и отрицательных обратных связей/ в кибернетических системах машин открывает пути повышению производительности, уровня совместимости функций элементов агрегата и эффективности управления.
5. Обобщение законов управления в живом организме и механизмах мобильных агрегатов, поиск путей желательного усиления живого подтвердили необходимость в очувствлении и самозащите элементов техники при минимальном преобразовании информации.
Превосходство мирового уровня по основным показателям от 2 до 34 раз обеспечивается применением систем режимных рабочих органов и нового направления комплексного решения проблем:
- снижения стоимости производства, приобретения и применения техники, массы и стоимости ходовой части в два раза, давления колес на почву и тяговой силы до 10 раз,
- повышения проходимости, экономичности и экологической безопасности от 2 до 10 раз путем устранения потерь до 20% энергии на буксование, более 10% на дообработку почвы, снижения потерь ресурса ходовой части, плодородия почвы и урожая, а также трения полевых досок плугов,
- снижения числа типов тракторов, плугов, лущильников, борон, катков и ряда уборочных машин, т.е. заменой более 100 машин одной со сменными рабочими органами,
- снижения скорости до 10 раз, пути и числа проходов по полю до 30 раз и кинетической энергии до 100 раз,
- создания условий для совмещения операций - резерва тяговой силы,
- повышения производительности по площади и кратности обработки земли,
- повышения ширины захвата независимо от силы тяги пропорционально числу, ходу секций рабочих органов,
- создания условий для регулирования силы тяги, ширины захвата, влажности, спелости почвы и времени работы с учетом производственной необходимости и условий местности,
- улучшения эксплуатационных качеств техники и условий для развития земледелия, окружающей среды, человека и общества,
- снижения потерь энергии, ресурса, влаги, времени и урожая,
- снижение длины агрегата, трудности управления, нагрузки человека и опасности работы на склонах.
Алгоритм действия и программа использования включает законы:
1. В продольной плоскости, изменяя скорость или шаг подачи, регулируют кратность повторения работ.
2. Избыток и недостаток продольной силы регулируют изменением режима перемещения рабочего органа.
3. В поперечной плоскости недостаток или избыток силы регулируют дисками, перемещением рабочих органов в противофазе и сопротивлением.
4. Изменением хода или шага установки рабочих органов определяют состояние поля, выравнивание или сохранение линии полива, базы.
5. Сдвиг почвы назад устраняется и ровная поверхность достигается изменением направления последующего движения по базовой линии.
6. Технологический сдвиг почвы на склоне крутизной β усиливается сдвигом силой Gsinβ частиц веса G.
7. Обнаружено явление "тихого смыва" плодородия почвы вниз под действием влаги /дождя, снега/ и установлена возможность компенсации последствий внесением больших доз удобрений ближе к вершине склона.
Перемещение рабочих органов под углом к горизонтали снижает смещение почвы вниз и перемещение рабочих органов в нейтральном режиме снижает нагрузку колес.
Дышло-датчик с телескопическим звеном и шарниром реагирует на различие сил тягача и прицепа и их бортов, дает сигнал для устранения ошибки по закону распеределения энергии между осями и бортами с учетом реакций почвы /дороги/ и курса в тяговом и тормозном режимах. Смещением точки приложения движущих сил вперед от центра сопротивления, а точки приложения тормозных сил назад повышает устойчивость движения в тяговом и тормозном режимах. Упор сзади устраняет откатывание и удерживает на подъеме. Этот закон управления реализуется зазором дышла, связанного с тормозами с возможностью регулирования разности сил торможения и движения.
Агромашина имеет высокий уровень получения информации и управления. Уравновешивание достигается соблюдением условий:
Рс≤Р; Р≤Рφ; Рс≤Рφ; Рс≤Ркр.
При оптимальных значениях скорости, кратности повторения работы, ширины захвата и грузоподъемности многорежимное колесо облегчает поворот нулевым радиусом, поперечное движение, использование силы рабочих органов без потерь 45% мощности в трансмиссии и ходовой части. Снижение скорости движения в 10 раз, саморегулирование сопротивлений и тяговых сил поворотом или подъемом рабочих органов, копирование борозды в разных режимах (ведущем, с догрузкой и разгрузкой, направляющем нейтральном и тормозном, совмещенном, использованием сил и разности сил бортов) создает резерв устойчивости и работоспособности в режиме робота без дополнительных датчиков, усилителей и исполнительных средств копирования борозды и накопления ошибки перекопирования. Снижение числа перекопирований борозды до 1-2 раз в смену и зависимости работы от человеческого фактора способствует защите здоровья человека, облегчает контроль и обслуживание 4-5 машин без затрат на дорогостоящие кабины для каждой машины.
Технико-экономическая эффективность применения заключается в улучшении показателей: производства и использования, а конкретнее - разгрузки и снижения числа колес в 3-4 раза использованием принципа совместимости функций, крошения комков без балласта и множества проходов; экологической, экономической, эргономической и медицинской безопасности; надежности информационно-технологического обслуживания без буксования колес, больших масс и скоростей; защиты почвы от воздействий колес. Кроме того, использование: металлопроката высокой готовности для изготовления, малоразмерных колес, авиаутиля, системы рабочих органов в течение года переориентирует земледелие на технологии высокого уровня и повышение агроэкологического и светотепловодного КПД.
Claims (19)
1. Агромашина, содержащая механизмы управления, двигатель, ведущее направляющее и самоустанавливающиеся колеса и рабочие органы - заменители ходовой части - отличающаяся тем, что самоустанавливающиеся колеса и/или рабочие органы - заменители ходовой части - установлены посредством механических рук с возможностью поворота, фиксации и перемещения приводом в виде гребневой рейки с щеками по бокам или нитевой, или винтовой передачи.
2. Агромашина по п.1, отличающаяся тем, что механические руки и направляющее ведущее колесо установлены с возможностью отбора мощности от электродвигателя или авиадвигателя после отработки в воздухе до отработки остаточного ресурса на земле.
3. Агромашина по п.1, отличающаяся тем, что рабочие органы выполнены соответственно из прокатных профилей ромбических плугов, отвалов, ножей, дисков, лап, плоскорезов - полос с элементами раскроя высокой готовности.
4. Агромашина по п.1, отличающаяся тем, что механические руки установлены с возможностью поворота и фиксации в режимах широкой колеи и выравнивания рамы, поворота и изменения ширины захвата, перевозки бункера-контейнера, привода колес и содержат диск и/или катки - заменители колес механических рук, катки привода ролика-отвала и копирования борозд минитеррас на склонах, упор-подъемник, лопастно-поршневой с роликом-утопителем поршней высокомоментный гидромотор.
5. Агромашина по п.1, отличающаяся тем, что содержит муфты независимого включения приводов колеса и рабочих органов с возможностью использования одной коробки передач в приводе ходовой части и рабочих органов для изменения скорости и нагрузки вала отбора мощности и использования правил и законов: изменения скорости и повторности выполнения технологических процессов за один проход без дополнительных рабочих органов, изменения разности скоростей бортов с учетом реакций опорной поверхности, курса, отработки знаков обратных связей при формировании режимов работы.
6. Агромашина по п.1, отличающаяся тем, что элементы привода, подачи вперед и подъема механической руки и рабочих органов соединены с возможностью переключения потоков энергии, быстрого подъема или подачи замедлением хода около камня и оценки производственных, агроэкологических и информационных свойств с учетом вредного действия тормозного режима на растения, почву, человека и общество.
7. Агромашина по п.1, отличающаяся тем, что рабочие органы установлены с возможностью снижения избытка и недостатка сил, поперечного перемещения и поворота нулевым радиусом для возвращения по следу прохода, а также изменения направления смещения почвы в сторону выравнивания поля без дополнительных рабочих органов или проходов по полю.
8. Агромашина по п.1, отличающаяся тем, что механическая рука имеет места для установки рабочих органов различным шагом и регулятор хода - упор для переключения движений, изменения шага подачи и хода или обработки поля, оставляя канал для полива или формируя ровную поверхность.
9. Агромашина по п.1, отличающаяся тем, что механическая рука содержит рабочие органы качения и резания в режимах уравновешивания боковой силы, самоповорота, самоустановки отвала, самовращения ролика, самоуравновешивания роликами, догрузки и разгрузки, регулирования глубины вспашки рабочими органами качения в виде дисков, катков и колес.
10. Способ использования агромашины, включающий замену деталей при обслуживании, вождение и регулирование скорости, отличающийся тем, что устанавливают элементы из проката и/или авиаутиля, адаптивно изменяют режимы работы и связи механических рук, рабочих органов, колес и приводов и/или переключают энергопотоки с учетом знаков обратных связей.
11. Способ по п.10, отличающийся тем, что колеса используют в режимах катка - уплотнителя почвы и крошения комков после вспашки, стабилизатора положения на склонах, датчика курса и радиуса поворота.
12. Способ по п.10, отличающийся тем, что авиадвигатель и колеса после отработки в воздухе используют на земле.
13. Способ по п.10, отличающийся тем, что электрическое питание машины при обработке земли используют ночью.
14. Способ по п.10, отличающийся тем, что снижают избыток и недостаток сил нагрузки колеса и изменяют режимы перемещения механической руки.
15. Способ по п.10, отличающийся тем, что машины различной мощности используют с одинаковой шириной захвата и снижают число базовых линий и проходов, а также ошибок при автовождении.
16. Способ по п.10, отличающийся тем, что рабочие органы перемещают под углом к горизонтали склона и снижают смещение почвы вниз.
17. Способ по п.10, отличающийся тем, что изменяют ход или шаг установки рабочих органов и определяют состояние поверхности поля, сохраняют линии полива и вождения или выравнивают поле.
18. Способ по п.10, отличающийся тем, что упор опускают и устраняют движение в сторону нарушения режима работы или остановки и повышают безопасность трогания с места на подъеме.
19. Способ по п.10, отличающийся тем, что разность сил рук изменяют в сторону повышения резерва устойчивости движения при ручном и автоматическом вождении - в режиме робота.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2003129624/11A RU2264320C2 (ru) | 2003-09-26 | 2003-09-26 | Агромашина и способ ее использования |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2003129624/11A RU2264320C2 (ru) | 2003-09-26 | 2003-09-26 | Агромашина и способ ее использования |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2003129624A RU2003129624A (ru) | 2005-04-10 |
| RU2264320C2 true RU2264320C2 (ru) | 2005-11-20 |
Family
ID=35611236
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2003129624/11A RU2264320C2 (ru) | 2003-09-26 | 2003-09-26 | Агромашина и способ ее использования |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2264320C2 (ru) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2370007C2 (ru) * | 2007-03-27 | 2009-10-20 | Исин Мевлютович Гаджимурадов | Способы обработки почвы и управления и машина для их реализации |
| RU2499720C2 (ru) * | 2011-03-29 | 2013-11-27 | Исин Мевлютович Гаджимурадов | Машина |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2432968A1 (fr) * | 1978-08-07 | 1980-03-07 | Tenn Nils | Vehicule de traction |
| SU1752640A1 (ru) * | 1989-11-21 | 1992-08-07 | Белорусский Политехнический Институт | Ходова часть корчевател |
| RU2106997C1 (ru) * | 1991-05-10 | 1998-03-20 | Н.К.Х. Хидраулисе Системен Б.В. | Колесное транспортное средство |
-
2003
- 2003-09-26 RU RU2003129624/11A patent/RU2264320C2/ru active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2432968A1 (fr) * | 1978-08-07 | 1980-03-07 | Tenn Nils | Vehicule de traction |
| SU1752640A1 (ru) * | 1989-11-21 | 1992-08-07 | Белорусский Политехнический Институт | Ходова часть корчевател |
| RU2106997C1 (ru) * | 1991-05-10 | 1998-03-20 | Н.К.Х. Хидраулисе Системен Б.В. | Колесное транспортное средство |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2370007C2 (ru) * | 2007-03-27 | 2009-10-20 | Исин Мевлютович Гаджимурадов | Способы обработки почвы и управления и машина для их реализации |
| RU2499720C2 (ru) * | 2011-03-29 | 2013-11-27 | Исин Мевлютович Гаджимурадов | Машина |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2003129624A (ru) | 2005-04-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112441113B (zh) | 斜坡上的自动折腰式转向 | |
| EP3858644B1 (de) | Zugmaschine | |
| US11667326B2 (en) | Automatic guidance performance improvement and transport with articulated machine form | |
| US20250194451A1 (en) | A Method to Cultivate a Piece of Farmland with an Autonomous Agricultural Vehicle and a Vehicle to Apply the said Method | |
| CN115176562B (zh) | 一种可实现路径跟踪的玉米免耕播种机器人 | |
| Swe et al. | Theoretical analysis of power requirement of a four-row tractor-mounted Chinese cabbage collector | |
| Ding et al. | The Current Development Status of Agricultural Machinery Chassis in Hilly and Mountainous Regions | |
| RU2264320C2 (ru) | Агромашина и способ ее использования | |
| RU2265298C2 (ru) | Способ обработки земли и агромашина | |
| Boland et al. | Reducing Soil Compaction from Equipment to Enhance Agricultural | |
| Tian et al. | Design and experiment of self-propelled system for paddy field weeder based on the interaction mechanism of wheel-soil | |
| RU2370007C2 (ru) | Способы обработки почвы и управления и машина для их реализации | |
| DE102024118487A1 (de) | Überprüfung des physischen anbringungsortes eines arbeitsgeräteempfängers mit hilfe der festgestellten ist-standorte des maschinen- und arbeitsgeräteempfängers | |
| RU2342821C2 (ru) | Агромашина | |
| NL2031414B1 (en) | A method to cultivate a piece of farmland with an autonomous tractor and a tractor for employing the method | |
| RU2232490C2 (ru) | Машина для обработки почвы | |
| Kuvachov et al. | Research on the properties of Wide Span Vehicle in Controlled Traffic Farming | |
| Savchenko et al. | Development of system for stabilizing movement of power unit with rear mounted mower | |
| Ma et al. | Design, simulation, and experimental study of hydrostatic drive system for wide-span farming platform | |
| Matmurodov et al. | Technical and technological ways to reduce soil compaction to preserve its fertility | |
| Liu et al. | Design and testing of a diamond-shaped four-wheeled gantry-like sugarcane cultivator | |
| Solovyev et al. | Modular design of diesel-electric tracked tractor with high degree of automation | |
| RU2226326C2 (ru) | Способ обработки земли и машина для его осуществления | |
| Beard et al. | Comparing widespan equipment with conventional machinery systems for soybean production | |
| RU204688U1 (ru) | Универсальный колесный трактор |