RU2294552C2 - Автоколлимационный эндоскоп - Google Patents
Автоколлимационный эндоскоп Download PDFInfo
- Publication number
- RU2294552C2 RU2294552C2 RU2005106047/28A RU2005106047A RU2294552C2 RU 2294552 C2 RU2294552 C2 RU 2294552C2 RU 2005106047/28 A RU2005106047/28 A RU 2005106047/28A RU 2005106047 A RU2005106047 A RU 2005106047A RU 2294552 C2 RU2294552 C2 RU 2294552C2
- Authority
- RU
- Russia
- Prior art keywords
- endoscope
- optical axis
- max
- lens
- external
- Prior art date
Links
- 230000007547 defect Effects 0.000 claims abstract description 25
- 230000003287 optical effect Effects 0.000 claims abstract description 18
- 238000005259 measurement Methods 0.000 claims description 6
- 230000005540 biological transmission Effects 0.000 claims description 4
- 230000000007 visual effect Effects 0.000 claims description 4
- 238000005286 illumination Methods 0.000 claims description 3
- 230000007123 defense Effects 0.000 abstract description 2
- 230000000694 effects Effects 0.000 abstract description 2
- 230000001066 destructive effect Effects 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 238000006073 displacement reaction Methods 0.000 description 3
- 238000007654 immersion Methods 0.000 description 3
- 239000000835 fiber Substances 0.000 description 2
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000009659 non-destructive testing Methods 0.000 description 1
Images
Landscapes
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
Abstract
Изобретение относится к неразрушающему контролю с помощью визуально-оптических и/или телевизионных средств и может быть использовано для контроля внутренних полостей различных изделий в оборонной, авиакосмической технике, а также в других отраслях машиностроения. В эндоскоп дополнительно введен внешний корпус, выполненный в виде тонкостенной трубки, на внешней поверхности которой вдоль ее образующей нанесена линейная шкала. Внутри трубки располагается собственно корпус эндоскопа с возможностью его линейного перемещения вдоль нее с помощью микрометрического механизма с индикатором перемещений. Индикатор перемещений установлен на трубке внешнего корпуса. На торце внешнего корпуса под углом 45° к оптической оси эндоскопа установлено плоское зеркало. Диаметр внешнего корпуса D, фокусное расстояние дополнительной микролинзы эндоскопа f'к, расстояние от точки пересечения зеркала с оптической осью эндоскопа t и максимальная глубина Hmax измеряемого дефекта связаны соотношением f'к≥t+D/2+Hmax+Δ, где Δ - конструктивный зазор между внешним дополнительным корпусом эндоскопа и контролируемой поверхностью. Технический результат - возможность измерения глубины дефектов на боковых поверхностях полостей, в которые вводится эндоскоп. 2 ил.
Description
Изобретение относится к неразрушающему контролю с помощью визуально-оптических и/или телевизионных средств и может быть использовано для контроля внутренних полостей различных изделий в оборонной, авиакосмической технике, а также в других отраслях машиностроения.
Известен эндоскоп для визуального поиска и измерения трехмерных дефектов. Он содержит корпус, в котором расположены осветительный световод, объектив, канал передачи изображения, окуляр с линейной шкалой, а также устройство для крепления эндоскопа на объекте с возможностью трехмерного перемещения и поворота относительно продольной оси эндоскопа и соответствующие индикаторы этих перемещений. Канал передачи изображения выполнен в виде регулярного световода или микротелекамеры. Эндоскоп дополнительно содержит светоделитель, расположенный между линейной шкалой и окуляром, непрозрачную маску с вырезом, осветитель для ее подсветки и дополнительную микролинзу. Маска с вырезом установлена перпендикулярно оси, проходящей через точку пересечения светоделителя с оптической осью эндоскопа и перпендикулярно ей, и оптически сопряжена с линейной шкалой. Дополнительную микролинзу вводят с помощью дистанционною механизма в ход лучей перед объективом эндоскопа на его оптической оси таким образом, что ее фокальная плоскость последовательно совпадает с наружной и внутренней поверхностями дефекта в процессе фокусировочных перемещений эндоскопа. Обеспечивается повышение точности и равномерности освоения [1].
Недостаток данного изобретения - невозможность измерения глубины дефектов на боковых поверхностях полостей, в которые вводится эндоскоп. Вместе с тем, это актуально при визуальном и измерительном контроле внутренних поверхностей трубопроводов различного назначения, СВЧ-волноводов, гидроусилителей и т.п. объектов.
Для устранения вышеуказанных недостатков в эндоскоп для визуального поиска и измерения трехмерных дефектов, содержащий корпус, в котором расположены осветительный световод, объектив, канал передачи изображения, выполненный в виде световода, окуляр с измерительной шкалой, а также устройство для крепления эндоскопа на объекте с возможностью трехмерного перемещения и поворота относительно продольной оси эндоскопа и соответствующие индикаторы этих перемещений, светоделитель, расположенный между линейной шкалой и окуляром, непрозрачную маску с вырезом, установленную перпендикулярно оси, проходящей через точку пересечения светоделителя с оптической осью эндоскопа и перпендикулярно ей, и оптически сопряженную с линейной шкалой, осветитель для ее подсветки, дополнительную микролинзу, вводимую с помощью дистанционного механизма в ход лучей перед объективом эндоскопа и располагаемую в корпусе эндоскопа на его оптической оси таким образом, что ее фокальная плоскость последовательно совпадает с наружной и внутренней поверхностями дефекта в процессе фокусировочных перемещений эндоскопа, дополнительно введен внешний корпус, выполненный в виде тонкостенной трубки, на внешней поверхности которой вдоль ее образующей нанесена линейная шкала, внутри трубки располагается корпус с возможностью линейного перемещения вдоль нее с помощью микрометрического механизма с индикатором перемещений, установленного на внешнем корпусе, на торце внешнего корпуса под углом 45° к оптической оси эндоскопа установлено плоское зеркало, при этом диаметр внешнего корпуса D, фокусное расстояние дополнительной микролинзы объектива эндоскопа fк, расстояние от микролинзы до точки пересечения оптической оси эндоскопа с зеркалом t и максимальной глубиною Нmax измеряемого дефекта связаны соотношением fк= t-D/2+Hmax+Δ, где Δ - зазор между внешним корпусом эндоскопа и контролируемой поверхностью.
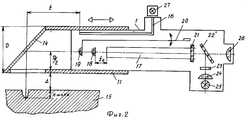
Изобретение поясняется чертежами, фиг.1 и 2, на которых представлены общая схема (фиг.1) и конструкция эндоскопа предлагаемого устройства (фиг.2).
Эндоскоп 1 крепится с помощью стопора 2 во втулке 4, на которой закреплен микровинт 3, с помощью которого эндоскоп 1 линейно перемещается относительно фланца 5, закрепляемого на внешнем корпусе эндоскопа 11 стопором 10. Величина продольного перемещения эндоскопа 1 относительно внешнего корпуса 11 измеряется с помощью индикатора перемещений 9, закрепленного на втулке 4 (фиг.1).
Внешний корпус эндоскопа 11 с расположенным в нем эндоскопом 1 может совершать продольные перемещения относительно фланца 12, а также поворачиваться вокруг своей продольном оси.
Стопор 13 служит для фиксации корпуса 11 при различной глубине погружения в объект. Корпус 11 крепится на объекте 8 с помощью устройства 6 и 7, позволяющих перемещать его в плоскости, нормальной к оптической оси эндоскопа, в двух ортогональных направлениях.
На поверхности корпуса 11 нанесена линейная шкала для оценки глубины погружения эндоскопа в объект.
На внешней торцевой поверхности фланца 12 нанесена угловая шкала для оценки поворота эндоскопа относительно него.
Линейная и угловая шкалы не показаны на фиг.1 в силу общеизвестности данных технических решений.
Зеркало 14 на переднем торце корпуса 11 предназначено для наблюдения дефекта 15 под углом 90° к оптической оси эндоскопа.
На фиг.2 показана схема эндоскопа устройства.
Эндоскоп 1 расположен в корпусе (фиг.2), в котором расположены осветительный световод 16, световод для передачи изображения 17, объектив эндоскопа 18, микролинза 19, вводимая (выводимая) из оптической схемы с помощью поворотного стержня 20, измерительная шкала 21, установленная на выходном торце световода 17, полупрозрачное зеркало 22, маска с вырезом 25, осветительный конденсор 24, источник света 25 для подсветки шкалы 21, окуляр 26 и внешний осветитель 27 для подсветки световода 16. Перед микролинзой 19 установлено под углом 45° к оптической оси эндоскопа дополнительное плоское зеркало 14, закрепленное на трубке 11, внутри которой перемещается корпус эндоскопа 1. На фиг.2 обозначены диаметр D трубки 11, t - текущее переменное расстояние от микролинзы 19 до точки пересечения эндоскопа с зеркалом 14 и контролируемой поверхностью 15. Нмакс - максимальная измеряемая глубина дефекта при заданных значениях параметров D, t, Δ.
Устройство работает следующий образом.
Внешний корпус 11 с эндоскопом 1 устанавливают во фланце 12 (фиг.1). Включают осветитель 27 (фиг.2), и при выведенной из хода лучей микролинзе 19 производят визуальный контроль внутренней поверхности изделия 8, осуществляя продольное вращательное перемещение корпуса 11 с эндоскопом 1 во фланце 12, а затем при необходимости его поперечное смещение с помощью устройств 6 и 7 (фиг.1). При обнаружении дефекта 15 фиксируют стопором 15 корпус 11 во фланце 12, вводят микролинзу 19 в ход лучей, включают осветитель 25 (фиг.2) и микровинтом 3 (фиг.1) последовательно фокусируют изображение автоколлимационной марки 24 (фиг.2) на поверхность изделия, прилегающую к дефекту, и на его дно, аналогично методу, описанному в прототипе [1].
Фиксируют соответствующие показания индикатора перемещения 9 (фиг.1) и по их разности определяют глубину дефекта.
Планарные размеры дефекта определяют с помощью шкалы 4 (фиг.2).
С помощью угловой шкалы на фланце 12 (фиг.1) определяют полярные координаты дефекта на поверхности полости. С помощью линейной шкалы на поверхности внешнего корпуса эндоскопа можно также оценивать линейную протяженность дефектов, размеры которых превосходят величину линейного поля зрения эндоскопа. Протяженность дефекта определяется при этом как разность отсчетов по этой шкале, соответствующих моментам наведения эндоскопа на начало и конец дефекта.
Между максимальной глубиной измеряемого дефекта Hmax, диаметром внешнего эндоскопа D, зазором между этим корпусом и поверхностью объекта t, фокусным расстоянием микролинзы 19 fк и расстоянием t от микролинзы 19 до точки пересечения ее оптической оси с зеркалом 14 существует очевидное соотношение (фиг.2):
Исследования опытного образца устройства показали, что для характерных значений параметров D=6,0 мм, Δ=0,1÷0,5 мм, t=3 мм и f' к=10 мм, Hmax≤10-(3+0,1+3)≈2,9 мм, что вполне достаточно для практики.
Погрешность измерений глубины составляет при этом ΔH≅±0,05 мм, что также удовлетворяет реальным требованиям производства. Погрешность измерения планарных размеров дефекта при цене деления шкалы 9, равной 0,1 мм, составляет ±0,2 мм. Погрешность измерения линейной и угловой координат дефекта составляют соответственно ±0,5 мм и 0,2° при ценах деления линейной шкалы 1 мм и угловой 1°.
Максимальная глубина погружения конкретного эндоскопа в изделие составила при этом 0,6 м, и, как показали исследования, может быть существенно увеличена (до 1±2 м) без существенного снижения погрешности измерения трехмерных размеров дефектов.
Литература
1. Патент РФ №2255549. Автоколлимационный эндоскоп.
2. Справочник конструктора оптико-механических приборов (В.А.Панов и др.). Л., Машиностроение, 1980, 742 с.
Claims (1)
- Эндоскоп для визуального поиска и измерения трехмерных дефектов, содержащий корпус, в котором расположены осветительный световод, объектив, канал передачи изображения, выполненный в виде световода, окуляр с измерительной шкалой, а также устройство для крепления эндоскопа на объекте с возможностью трехмерного перемещения и поворота относительно продольной оси эндоскопа и соответствующие индикаторы этих перемещений, светоделитель, расположенный между линейной шкалой и окуляром, непрозрачную маску с вырезом, установленную перпендикулярно оси, проходящей через точку пересечения светоделителя с оптической осью эндоскопа и перпендикулярно ей, и оптически сопряженную с линейной шкалой, осветитель для ее подсветки, дополнительную микролинзу, вводимую с помощью дистанционного механизма в ход лучей перед объективом эндоскопа и располагаемую в корпусе эндоскопа на его оптической оси таким образом, что ее фокальная плоскость последовательно совпадает с наружной и внутренней поверхностями дефекта в процессе фокусировочных перемещений эндоскопа, отличающийся тем, что он дополнительно содержит внешний корпус, выполненный в виде тонкостенной трубки, на внешней поверхности которой вдоль ее образующей нанесена линейная шкала, внутри трубки располагается корпус с возможностью линейного перемещения вдоль нее с помощью микрометрического механизма с индикатором перемещений, установленного на внешнем корпусе, на торце внешнего корпуса под углом 45° к оптической оси эндоскопа установлено плоское зеркало, при этом диаметр внешнего корпуса D, фокусное расстояние дополнительной микролинзы объектива эндоскопа f'к, расстояние от микролинзы до точки пересечения оптической оси с зеркалом t и максимальная глубина Нmax измеряемого дефекта связаны соотношением f'к>t+D/2+Нmax+Δ, где Δ - зазор между внешним дополнительным корпусом эндоскопа и контролируемой поверхностью.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2005106047/28A RU2294552C2 (ru) | 2005-03-04 | 2005-03-04 | Автоколлимационный эндоскоп |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2005106047/28A RU2294552C2 (ru) | 2005-03-04 | 2005-03-04 | Автоколлимационный эндоскоп |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2005106047A RU2005106047A (ru) | 2006-08-10 |
| RU2294552C2 true RU2294552C2 (ru) | 2007-02-27 |
Family
ID=37059409
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2005106047/28A RU2294552C2 (ru) | 2005-03-04 | 2005-03-04 | Автоколлимационный эндоскоп |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2294552C2 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2457521C2 (ru) * | 2010-11-02 | 2012-07-27 | Государственное образовательное учреждение высшего профессионального образования Новгородский государственный университет имени Ярослава Мудрого | Телевизионный эндоскоп |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU161662A1 (ru) * | ||||
| US3804081A (en) * | 1971-07-29 | 1974-04-16 | Olympus Optical Co | Endoscope |
| US4588294A (en) * | 1984-06-27 | 1986-05-13 | Warner-Lambert Technologies, Inc. | Searching and measuring endoscope |
| RU2235349C2 (ru) * | 2002-05-15 | 2004-08-27 | Войсковая часть 75360 | Автоколлимационный эндоскоп |
-
2005
- 2005-03-04 RU RU2005106047/28A patent/RU2294552C2/ru not_active IP Right Cessation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU161662A1 (ru) * | ||||
| US3804081A (en) * | 1971-07-29 | 1974-04-16 | Olympus Optical Co | Endoscope |
| US4588294A (en) * | 1984-06-27 | 1986-05-13 | Warner-Lambert Technologies, Inc. | Searching and measuring endoscope |
| RU2235349C2 (ru) * | 2002-05-15 | 2004-08-27 | Войсковая часть 75360 | Автоколлимационный эндоскоп |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2457521C2 (ru) * | 2010-11-02 | 2012-07-27 | Государственное образовательное учреждение высшего профессионального образования Новгородский государственный университет имени Ярослава Мудрого | Телевизионный эндоскоп |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2005106047A (ru) | 2006-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US3595220A (en) | Device for measuring the distance of an object from the forward end portion of an endoscope | |
| US3819267A (en) | Device for measuring dimensions from the forward end portion of an endoscope | |
| JPH02193007A (ja) | 管または中ぐり穴の内部輪郭の光学検査用装置 | |
| CN116908217B (zh) | 一种深孔测量与三维重建系统及其使用方法 | |
| CN101509801A (zh) | 智能化光源线阵ccd液位测量方法及测量装置 | |
| DE102017004475A1 (de) | Messgerät zur Messung von Oberflächenprofilen in Hohlräumen | |
| CN201974214U (zh) | 基于线阵ccd与透明管的液位测量装置 | |
| CN102221390A (zh) | 基于线阵ccd与透明管的液位测量装置及测量方法 | |
| CN102435259A (zh) | 带隔离栅的线阵ccd液位测量装置及测量方法 | |
| RU2294552C2 (ru) | Автоколлимационный эндоскоп | |
| Ye et al. | A laser triangulation-based 3D measurement system for inner surface of deep holes | |
| RU2239179C1 (ru) | Рентгенооптический эндоскоп | |
| EP3390960B1 (en) | Scanning device and method for measurement and analysis of circular holes in transparent liquids in ionizing radiation environment | |
| CN108507501A (zh) | 轻便型火炮多身管轴线平行度检测仪 | |
| EP0228493A1 (en) | Searching and measuring endoscope | |
| RU2235349C2 (ru) | Автоколлимационный эндоскоп | |
| RU2285235C2 (ru) | Устройство для визуального и измерительного контроля внутренних полостей | |
| JPH03231622A (ja) | 内視鏡装置 | |
| JP2019191050A (ja) | 光イメージング用プローブ及び光学式測定装置 | |
| HU183914B (en) | Optical apparatus for determining the refractivity profile of ligh-conducting fibre | |
| US2437458A (en) | Inspection periscope | |
| RU2270416C2 (ru) | Устройство для контроля внутренних поверхностей тел | |
| RU2290626C2 (ru) | Устройство для визуального и измерительного контроля внутренних полостей | |
| RU2288446C1 (ru) | Оптическое устройство для измерения диаметра и контроля внутреннего профиля крупногабаритных изделий | |
| RU2796797C2 (ru) | Волоконно-оптический способ определения коэффициента преломления прозрачного вещества и реализующий его волоконно-оптический рефрактометрический измерительный преобразователь |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20070305 |