RU2357110C1 - Способ стопорения вала, остановленного в произвольном положении, и устройство для его осуществления - Google Patents
Способ стопорения вала, остановленного в произвольном положении, и устройство для его осуществления Download PDFInfo
- Publication number
- RU2357110C1 RU2357110C1 RU2007141838/11A RU2007141838A RU2357110C1 RU 2357110 C1 RU2357110 C1 RU 2357110C1 RU 2007141838/11 A RU2007141838/11 A RU 2007141838/11A RU 2007141838 A RU2007141838 A RU 2007141838A RU 2357110 C1 RU2357110 C1 RU 2357110C1
- Authority
- RU
- Russia
- Prior art keywords
- shaft
- link
- rocker
- arrest
- links
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 27
- 230000007246 mechanism Effects 0.000 claims abstract description 31
- 230000033001 locomotion Effects 0.000 claims abstract description 10
- 230000005540 biological transmission Effects 0.000 claims description 5
- 230000008859 change Effects 0.000 claims description 4
- 239000000126 substance Substances 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 4
- 239000012530 fluid Substances 0.000 description 2
- 238000011089 mechanical engineering Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000004575 stone Substances 0.000 description 1
Images

Landscapes
- Transmission Devices (AREA)
Abstract
Изобретение относится к машиностроению и может быть использовано в машинах и механизмах для стопорения вала, остановленного в произвольном позиционном положении. Согласно способу стопорения вала к валу параллельно друг другу присоединяют передаточные механизмы, у которых выходное звено является общим, с одинаковыми передаточными функциями при свободном вращении вала, а при стопорении вала передаточную функцию одного из механизмов изменяют, вследствие чего выходное звено, а значит и вал, не может перемещаться. Устройство для осуществления упомянутого способа состоит из двух параллельных передаточных кинематических цепей с одинаковыми передаточными функциями, каждая из которых состоит из последовательно соединенных шарнирного четырехзвенника и коромыслово-ползунного механизма, входные звенья которых приводятся в движение от вала, подлежащего стопорению, а выходное звено ползун - общее, кулисного механизма, установленного параллельно с шарнирными четырехзвенниками так, что кулисный камень имеет общую ось вращения с выходными звеньями шарнирных четырехзвенников, а его входное звено - коромысло совершает совместное движение с входными звеньями шарнирных четырехзвенников. Кулиса механизма является направляющей для выходного звена - ползуна. В одной из кинематических цепей содержатся кинематические пары звеньев, позволяющие шатуну и выходному звену шарнирного четырехзвенника и шатуну кривошипно-ползунного механизма поворачиваться вокруг кулисы для изменения передаточной функции этой кинематической цепи. В результате обеспечивается бесступенчатость стопорения вала, не требуется приложения дополнительных внешних сил. 2 н.п. ф-лы, 4 ил.
Description
Изобретение относится к машиностроению и может быть использовано в машинах и механизмах для стопорения вала, остановленного в произвольном позиционном положении.
При функционировании машин часто требуется фиксация вала после его остановки в произвольном, но обусловленном технологическими требованиями, положении. Известно несколько способов реализации такого стопорения.
Первый способ - механический, основанный на образовании в момент стопорения зацепления между элементами вала и стойки. В этом случае элементы, образующие зацепление, располагаются с определенным шагом на рабочих поверхностях вала и стойки (пат. RU 2055242 С1, МПК F16B 1/00), (А.Ф.Крайнев. Словарь-справочник по механизмам. М.: Машиностроение, 1981, с.343, 389).
Положительными качествами такого способа является стабильность положения фиксируемого вала после стопорения, отсутствие дополнительных внешних сил для удержания вала в положении стопорения и простота технической реализации.
Недостатки способа заключаются в ступенчатости позиционирования и погрешности позиционирования вследствие неизбежности зазоров между элементами механизма стопорения. Если используются дополнительные детали для выборки зазоров, то требуется прикладывать силы для выведения таких деталей из зацепления.
Второй способ - механический, основанный на создании в момент стопорения сил трения между валом и стойкой (А.Ф.Крайнев. Словарь-справочник по механизмам. М.: Машиностроение, 1981, с.359), (а.с. СССР 164420, МПК B66D 5/32).
Положительным качеством этого способа является бесступенчатость позиционирования вала.
Недостатки способа проявляются в необходимости приложения значительных внешних сил для создания сил трения, что негативно сказывается на эксплуатационных свойствах конструкции. Нестабильность сил трения ведет к нестабильности позиционирования вала.
Третий способ - гидравлический, основывается на создании в момент стопорения сопротивления для потока жидкости, перемещающегося вместе с валом (пат. RU 2211797 С2, МПК B66D 5/32), (пат. RU 2001113324 А, МПК B66D 5/32), (бесступенчатый стопор дверей автомобиля BMW 745i).
Достоинствами гидравлического способа являются бесступенчатость позиционирования вала и быстрота процесса стопорения.
К недостаткам способа можно отнести необходимость принятия специальных мер для стабилизации положения вала, компенсации утечек жидкости, высокие требования к технологии реализации.
Главным принципом всех приведенных способов стопорения вала является изменение условий его движения при включении механизма стопорения. Различные способы по-разному реализуют этот принцип изменения условий движения.
По совокупности реализуемых признаков работы в качестве прототипа следует принять третий способ в силу того, что предлагаемый способ также обеспечивает бесступенчатость стопорения и не требует приложения дополнительных внешних сил для обеспечения стопорения вала.
Для обеспечения бесступенчатого стопорения вала и стабильного его положения без приложения к нему дополнительных внешних сил к валу параллельно друг другу присоединяются два передаточных механизма, имеющих одно общее выходное звено. Механизмы обладают одинаковыми передаточными функциями при свободном вращении вала. Один из передаточных механизмов является управляемым и может менять свою передаточную функцию в момент стопорения вала. Таким образом, при различных передаточных функциях выходное звено механизмов двигаться не может и остается неподвижным. Движение звеньев передаточных механизмов, а значит и вала, также становится невозможным, т.е. вал стопорится в том положении, в котором был остановлен.
Аналогов устройства для осуществления предлагаемого способа стопорения вала не выявлено.
На фиг.1 изображена блок-схема, поясняющая предлагаемый способ стопорения вала.
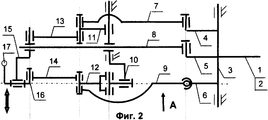
На фиг.2 изображена структурная схема механизма, реализующего предлагаемый способ.
На фиг.3 изображена на виде сбоку структурная схема механизма, реализующего предлагаемый способ, в режиме свободного вращения вала.
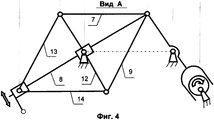
На фиг.4 изображена на виде сбоку структурная схема механизма, реализующего предлагаемый способ, в режиме стопорения вала.
На фиг.1 к валу 1 присоединяются входные звенья 2 и 6 передаточных механизмов. От них через кинематические цепи механизмов 3 и 7 движение передается на выходное звено 8, на котором реализуются передаточные функции механизмов в сочетании F1=F1 или F2≠F1 в зависимости от состояния устройства управления 4. Выходное звено либо свободно движется, если реализуется сочетание передаточных функций F1=F1, либо остается неподвижным, если реализуется сочетание функций F2≠F1. В последнем случае вал 1 стопорится.
Устройство, реализующее предлагаемый способ стопорения вала (фиг.2), содержит следующие звенья. Вал 1, подлежащий стопорению. Эксцентрик 2, жестко установленный на валу 1. Вал 3, образующий с эксцентриком 2 кулачковый механизм. На валу 3 жестко установлены параллельно друг другу три коромысла одинаковой длины 4, 5, 6. Коромысло 5 образует кулисный механизм с кулисой 8 и вращающимся кулисным камнем 10. Коромысло 4 образует шарнирный параллелограмм с шатуном 7 и коромыслом 11, которое образует вращательную кинематическую пару с кулисным камнем. Коромысло 6 образует шарнирный параллелограмм с шатуном 9 и коромыслом 12. Шатун 9 образует с коромыслом 6 сферическую кинематическую пару, а с коромыслом 12 - вращательную кинематическую пару. Ось вращения коромысла 12 расположена на одной линии с осями вращения звеньев 10 и 11. Коромысло 11 образует коромыслово-ползунный механизм с шатуном 13 и ползуном 15. Ползун 15 образует поступательную кинематическую пару с кулисой 8. Коромысло 12 образует коромыслово-ползунный механизм с шатуном 14 и звеном 16, которое является составной частью ползуна 15 и образует с ним вращательную кинематическую пару. При помощи рукоятки 17 звено 16 вместе с шатуном 14, коромыслом 12 и шатуном 9 могут поворачиваться вокруг оси, положение которой определяется положением кулисы 8. При повороте рукоятки 17 положение всех других звеньев устройства не изменяется.
Устройство, реализующее предлагаемый способ стопорения вала, работает следующим образом.
В режиме свободного вращения вала 1 (фиг.3) коромысла 4, 5, 6 совершают вращательно-колебательное движение с определенной амплитудой. Шарнирный параллелограмм от коромысла 4 передает движение по кинематической цепи звеньев 7, 11, 13 на выходное звено - ползун 15, линия движения которого задается положением кулисы 8. Идентичный шарнирный параллелограмм от коромысла 6 передает движение по кинематической цепи звеньев 9, 12, 14 на выходное звено - ползун 15. Обе кинематические цепи имеют одинаковые передаточные функции, поэтому ползун 15 свободно перемещается по кулисе 8.
В режиме стопорения вала 1 (фиг.4) при его остановке рукоятку управления 17 поворачивают на 180° вокруг оси, положение которой определяется положением кулисы 8. Вместе с рукояткой 17 вокруг этой же оси поворачиваются шатун 14, коромысло 12 и шатун 9, а шарнирный параллелограмм трансформируется в антипараллелограмм, у которого передаточная функция отличается от передаточной функции параллелограмма. В этом случае выходное звено - ползун 15 перемещаться не может, и вал 1 стопорится в том положении, в котором произведена трансформация кинематической цепи.
Claims (2)
1. Способ стопорения вала, остановленного в произвольном положении, без приложения дополнительных внешних сил, удерживающих вал, отличающийся тем, что к валу параллельно друг другу присоединяют передаточные механизмы, у которых выходное звено является общим, с одинаковыми передаточными функциями при свободном вращении вала, а при стопорении вала передаточную функцию одного из механизмов изменяют, вследствие чего выходное звено, а значит и вал, не может перемещаться.
2. Устройство для осуществления способа стопорения вала, остановленного в произвольном положении, состоящее из двух параллельных передаточных кинематических цепей с одинаковыми передаточными функциями, каждая из которых состоит из последовательно соединенных шарнирного четырехзвенника и коромыслово-ползунного механизма, входные звенья которых приводятся в движение от вала, подлежащего стопорению, а выходное звено ползун - общее, кулисного механизма, установленного параллельно с шарнирными четырехзвенниками так, что кулисный камень имеет общую ось вращения с выходными звеньями шарнирных четырехзвенников, а его входное звено - коромысло совершает совместное движение с входными звеньями шарнирных четырехзвенников, при этом кулиса механизма является направляющей для выходного звена - ползуна, в одной из кинематических цепей содержатся кинематические пары звеньев, позволяющие шатуну и выходному звену шарнирного четырехзвенника и шатуну кривошипно-ползунного механизма поворачиваться вокруг кулисы для изменения передаточной функции этой кинематической цепи.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2007141838/11A RU2357110C1 (ru) | 2007-11-12 | 2007-11-12 | Способ стопорения вала, остановленного в произвольном положении, и устройство для его осуществления |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2007141838/11A RU2357110C1 (ru) | 2007-11-12 | 2007-11-12 | Способ стопорения вала, остановленного в произвольном положении, и устройство для его осуществления |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2357110C1 true RU2357110C1 (ru) | 2009-05-27 |
Family
ID=41023503
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2007141838/11A RU2357110C1 (ru) | 2007-11-12 | 2007-11-12 | Способ стопорения вала, остановленного в произвольном положении, и устройство для его осуществления |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2357110C1 (ru) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3874480A (en) * | 1972-04-03 | 1975-04-01 | Porter Co P L | Friction brake mechanism |
| SU1562553A1 (ru) * | 1988-06-15 | 1990-05-07 | Научно-производственное объединение по механизации и автоматизации производства машин для хлопководства "Технолог" | Стопорное устройство |
-
2007
- 2007-11-12 RU RU2007141838/11A patent/RU2357110C1/ru not_active IP Right Cessation
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3874480A (en) * | 1972-04-03 | 1975-04-01 | Porter Co P L | Friction brake mechanism |
| SU1562553A1 (ru) * | 1988-06-15 | 1990-05-07 | Научно-производственное объединение по механизации и автоматизации производства машин для хлопководства "Технолог" | Стопорное устройство |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105965477B (zh) | 对称和非对称可重构四构态并联平台 | |
| RU2357110C1 (ru) | Способ стопорения вала, остановленного в произвольном положении, и устройство для его осуществления | |
| JP2017508939A5 (ru) | ||
| RU2619158C2 (ru) | Солнечная батарея космического аппарата | |
| GB2540691A (en) | Apparatus for converting motion | |
| CN105619437A (zh) | 一种模块化两自由度手抓 | |
| CN106345676A (zh) | 一种机械式振幅连续可调振动平台 | |
| JP2018150938A5 (ru) | ||
| RU2380678C1 (ru) | Установка для испытания образцов на усталость | |
| RU2530670C1 (ru) | Двигатель внутреннего сгорания с изменяемой степенью сжатия | |
| CN101863023A (zh) | 一种平面极坐标两自由度并联机构 | |
| RU2403141C2 (ru) | Пространственный механизм | |
| RU2679260C1 (ru) | Манипулятор для субмикронных перемещений | |
| RU2720270C1 (ru) | Складной механизм с шестью степенями свободы | |
| RU2179505C1 (ru) | Устройство типа "рука" для передачи изделий | |
| RU2674357C1 (ru) | Пространственный механизм для микропозиционирования | |
| RU2376571C1 (ru) | Установка для испытания образцов материалов на усталость | |
| CN206253320U (zh) | 一种机械式振幅连续可调振动平台 | |
| US12292417B2 (en) | Repetitive moment generating device | |
| RU2729835C1 (ru) | Складной механизм с интегрированными кинематическими цепями | |
| SU1362888A1 (ru) | Рычажно-зубчатый механизм | |
| RU2750997C1 (ru) | Кривошипный механизм изменяемой структуры | |
| RU2568159C2 (ru) | Симметричный кривошипно-ползунный механизм богданова | |
| SU573734A1 (ru) | Устройство дл испытани шарниров гусениц | |
| RU2295078C1 (ru) | Механизм передачи равных угловых скоростей между скрещивающимися осями |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20091113 |