RU2497653C2 - Качающийся приводной механизм ручной машины - Google Patents
Качающийся приводной механизм ручной машины Download PDFInfo
- Publication number
- RU2497653C2 RU2497653C2 RU2010129101/02A RU2010129101A RU2497653C2 RU 2497653 C2 RU2497653 C2 RU 2497653C2 RU 2010129101/02 A RU2010129101/02 A RU 2010129101/02A RU 2010129101 A RU2010129101 A RU 2010129101A RU 2497653 C2 RU2497653 C2 RU 2497653C2
- Authority
- RU
- Russia
- Prior art keywords
- swinging
- movement
- drive shaft
- mechanism according
- axis
- Prior art date
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D16/00—Portable percussive machines with superimposed rotation, the rotational movement of the output shaft of a motor being modified to generate axial impacts on the tool bit
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D11/00—Portable percussive tools with electromotor or other motor drive
- B25D11/06—Means for driving the impulse member
- B25D11/062—Means for driving the impulse member comprising a wobbling mechanism, swash plate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D17/00—Details of, or accessories for, portable power-driven percussive tools
- B25D17/24—Damping the reaction force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2217/00—Details of, or accessories for, portable power-driven percussive tools
- B25D2217/0073—Arrangements for damping of the reaction force
- B25D2217/0076—Arrangements for damping of the reaction force by use of counterweights
- B25D2217/0088—Arrangements for damping of the reaction force by use of counterweights being mechanically-driven
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2250/00—General details of portable percussive tools; Components used in portable percussive tools
- B25D2250/005—Adjustable tool components; Adjustable parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2250/00—General details of portable percussive tools; Components used in portable percussive tools
- B25D2250/331—Use of bearings
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Percussive Tools And Related Accessories (AREA)
- Manipulator (AREA)
Abstract
Изобретение относится к ручным машинам, преимущественно к перфораторам и/или отбойным молоткам. Машина имеет ведущий вал (12), содержащий расположенную на ведущем валу (12) косую опору (14) и установленную на косой опоре (14) качающуюся шайбу (16). На качающейся шайбе (16) предусмотрено по меньшей мере два качающихся пальца (18, 20), имеющих оси (22, 24). В предлагаемом приводном механизме оси (22, 24) качающихся пальцев (18, 20) образуют угол (α), не равный 180°. Описан качающийся приводной механизм (10) ручной машины. Обеспечивается практически полное устранение вибрационных явлений, вызываемых силами инерции. 10 з.п. ф-лы, 4 ил.
Description
Область техники, к которой относится изобретение
Настоящее изобретение относится к качающемуся приводному механизму ручной машины, прежде всего перфоратора и/или отбойного молотка, охарактеризованному в ограничительной части пункта 1 формулы изобретения.
Уровень техники
Из публикации DE 19851888 A1 известен качающийся приводной механизм ручной машины, выполненной в виде перфоратора и имеющей ведущий вал. Качающийся приводной механизм содержит косую опору, расположенную на ведущем валу, и качающуюся шайбу, установленную на косой опоре. На качающейся шайбе предусмотрено два качающихся пальца, которые имеют (геометрические) оси и служат для приведения в движение поршня компрессионно-вакуумного ударного устройства, а также для приведения в движение уравновешивающей массы, причем оба качающихся пальца расположены на качающейся шайбе диаметрально противоположно друг другу.
Раскрытие изобретения
Объектом изобретения является качающийся приводной механизм ручной машины, в частности импульсно-силовой ручной машины, прежде всего перфоратора и/или отбойного молотка, имеющей ведущий вал, содержащий расположенную на ведущем валу косую опору и установленную на косой опоре качающуюся шайбу, на которой предусмотрено по меньшей мере два качающихся пальца, имеющих (геометрические) оси.
В предлагаемом в изобретении приводном механизме оси качающихся пальцев образуют угол а, не равный 18°. В этой связи под "качающимся приводным механизмом" следует понимать, в частности, приводной механизм, который преобразует, или переводит, вращательное движение ведущего элемента в возвратно-поступательное движение ведомого элемента. При этом элемент, вращающийся от привода и выполненный в виде ведущего вала, действует на качающуюся шайбу качающегося приводного механизма таким образом, что качающаяся шайба качается, совершая возвратно-вращательное движение вокруг оси вращения, и при этом посредством по меньшей мере одного качающегося пальца может сообщать линейное поступательное движение по меньшей мере еще одному другому элементу. Качающиеся приводные механизмы (относящиеся к кулачковым механизмам и в обиходе называемые также "пьяными" подшипниками) применяются в ручных машинах, например перфораторах, для преобразования вращательного движения привода в возвратно-поступательное движение поршня ударного устройства, который служит для создания давления в воздушной подушке ударного устройства ручной машины, причем это давление используется для нанесения ударов по рабочему инструменту ручной машины. При этом качающийся палец представляет собой неуравновешенную массу, которая, прежде всего на высоких оборотах, проявляется через вибрации, или колебания, шум и повышенный износ. Для устранения, или компенсации, этого дебаланса, как известно, в ручной машине выполняют целенаправленное уравновешивание масс (балансировку). При этом уравновешивание масс может быть положительным или отрицательным. Как правило, положительное уравновешивание масс осуществляют применением уравновешивающих масс, позволяющих добиться такого расположения центра масс уравновешиваемой детали, в данном случае качающейся шайбы, чтобы он совпал с центром оси вращения качающейся шайбы. Таким образом, обе главные оси инерции качающейся шайбы совпадают с осью вращения. В рассматриваемом примере для этого на качающейся шайбе предусматривают второй качающийся палец, преобразующий вращательное движение ведущего вала в поступательное движение уравновешивающей массы. При этом предпочтительно, чтобы по меньшей мере один из качающихся пальцев был расположен в пространстве наклонно. Предлагаемое в изобретении решение обеспечивает полное, по крайней мере практически полное, устранение вибрационных явлений, вызываемых силами инерции.
Оси качающихся пальцев могут образовывать угол а, составляющий от 10° до 170° и/или от 190° до 350°. В ручных машинах, в особенности в перфораторах, сила ускорения, возбуждающая в перфораторе колебания, или сообщающая ему возвратно-поступательное движение, имеет несколько различных составляющих. К этим составляющим относятся главным образом силы инерции и сила давления перфоратора, а также прижимающее усилие, прикладываемое оператором перфоратора. Для приведения указанной силы ускорения в противофазу с силами инерции уравновешивающей массы перфоратора угол а между осями качающихся пальцев в предпочтительном варианте должен составлять между 10° и 170° и/или между 190° и 350°. Благодаря этому достигается оптимальный фазовый угол между движением поршня и движением уравновешивающего элемента, что позволяет свести колебания перфоратора к минимуму.
Целесообразно, чтобы угол между осями качающихся пальцев был регулируемым. Это позволяет очень точно, предпочтительно бесступенчато, устанавливать уравновешивающий элемент и таким образом согласовывать его положение с любыми ситуациями по нагрузке. В частности, это также создает возможность применения качающегося приводного механизма в различных ручных машинах, поскольку благодаря вышеупомянутой возможности регулировки угла его можно адаптировать ко всем ручным машинам.
Возможность регулировку угла а предпочтительно обеспечить установкой меньшей мере одного качающегося пальца на качающейся шайбе с возможностью перемещения или перестановки. Это означает конструктивно простую, недорогую в осуществлении возможность регулировки.
Целесообразно, чтобы один качающийся палец преобразовывал вращательное движение ведущего вала в поступательное движение одного элемента, а другой качающийся палец преобразовывал вращательное движение ведущего вала в поступательное и/или вращательное движение еще одного элемента. Это позволяет реализовать оптимальный фазовый угол между движением первого элемента и движением второго элемента и таким образом свести колебания ручной машины к минимуму.
Кроме того, по меньшей мере один элемент может быть установлен с возможностью направленного линейного перемещения. Предпочтительно, чтобы линейное движение направленно совершали оба элемента, чем достигается оптимальное уравновешивание сил, действующих во время работы ручной машины.
Вышеупомянутыми элементами могут быть поршень ударного устройства ручной машины и/или уравновешивающий элемент. Уравновешивающий элемент образует своего рода противовес для поршня ударного устройства и создает вращающие моменты, противодействующие силам инерции и моментам, возникающим вследствие движения поршня. Это повышает плавность и бесшумность работы ручной машины. Предпочтителен вариант, в котором поршень установлен с возможностью направленного линейного перемещения, и уравновешивающий элемент установлен с возможностью линейного или вращательного движения.
Далее, предпочтительно, чтобы уравновешивающий элемент был установлен с возможностью направленного движения по существу в направлении оси главного движения ручной машины. При этом выражение "по существу в направлении оси главного движения" следует понимать, в частности, в том смысле, что угловое отклонение направляющей уравновешивающего элемента от оси главного движения составляет менее 10°, предпочтительно менее 5°. Это обеспечивает оптимальное уравновешивание сил, действующих в ручной машине, поскольку благодаря этому уравновешивающий элемент создает оптимальный противовес поршню ударного устройства, также движущемуся в направлении главного движения. К тому же это облегчает сборку ручной машины, поскольку отдельные детали необходимо устанавливать в корпусе ручной машины в одном лишь главном направлении. В другом варианте осуществления изобретения уравновешивающий элемент также может быть установлен с возможностью направленного движения в направлении оси, проходящей в пространстве наклонно к оси главного движения ручной машины, например, под углом 45° к оси главного движения, т.е. может быть предусмотрен уравновешивающий элемент, расположенный в пространстве наклонно.
В другом варианте осуществления изобретения уравновешивающий элемент может быть установлен с возможностью поворота вокруг оси вращения. Это позволяет уменьшать колебания ручной машины простым и недорогим в осуществлении образом, преобразуя посредством первого качающегося пальца вращательное движение ведущего вала в поступательное движение первого элемента, а посредством второго качающегося пальца - вращательное движение ведущего вала в по меньшей мере вращательное движение еще одного элемента.
Целесообразным является выполнение уравновешивающего элемента в виде дискообразной и/или U-образной детали. Благодаря этому существует возможность индивидуального выполнения этой детали относительно выполняемой ею балансировочной функции, например, выполнения детали с переменной толщиной.
Особенно целесообразен вариант, в котором уравновешивающий элемент по меньшей мере частично окружает направляющую поршня и/или ведущий вал, т.е. направляющая поршня и/или ведущий вал проходит сквозь уравновешивающий элемент. Это позволяет оптимально адаптировать качающийся приводной механизм к существующим конструкциям, в особенности позволяет рационально использовать имеющийся конструктивный объем.
Краткое описание чертежей
Другие преимущества изобретения раскрыты в приведенном ниже описании его осуществления. На чертежах изображено два варианта осуществления изобретения. На чертежах, в описании и формуле изобретения множество признаков изобретения представлено в комбинации. Исходя из целесообразности, специалист сможет также рассматривать эти признаки по отдельности и составлять из них другие рациональные комбинации. На чертежах показано:
фиг.1 - вид сбоку предлагаемого в изобретении качающегося приводного механизма ручной машины в первом варианте осуществления изобретения,
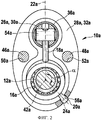
фиг.2 - вид спереди предлагаемого в изобретении качающегося приводного механизма, показанного на фиг.1,
фиг.3 - вид сбоку предлагаемого в изобретении качающегося приводного механизма ручной машины во втором варианте осуществления изобретения и
фиг.4 - вид спереди предлагаемого в изобретении качающегося приводного механизма, показанного на фиг.3.
Осуществление изобретения
На фиг.1 и 3 приведены частично выполненные в разрезе изображения качающегося приводного механизма 10 ручной машины, которая сама по себе на чертежах не показана. В одном из предпочтительных случаев осуществления изобретения ручной машиной является перфоратор. Качающийся приводной механизм 10 содержит косую опору 14, тела качения 38 и качающуюся шайбу 16 с качающимися пальцами 18, 20. Ручная машина имеет ведущий вал 12, на котором закреплен качающийся приводной механизм 10 с косой опорой 14. Косая опора 14 соединена с ведущим валом 12 с фиксацией от проворачивания. Косая опора 14 имеет кольцеобразную внутреннюю дорожку качения 40, находящуюся в плоскости, неперпендикулярной оси 42 вращения ведущего вала 12. Вокруг косой опоры 14 расположена качающаяся шайба 16, на внутренней стороне которой имеется внешняя дорожка качения 44, противолежащая внутренней дорожке качения 40 косой опоры 14. Между внутренней дорожкой качения 40 и внешней дорожкой качения 44 подвижно расположены тела качения 38, предпочтительно шарики.
Как показано на фиг.2 и 4, на периферии качающейся шайбы 16 предусмотрены первый качающийся палец 18 с первой осью 22 и второй качающийся палец 20 со второй осью 24, которые выступают радиально наружу от проходящей в окружном направлении боковой поверхности качающейся шайбы 16. При этом качающиеся пальцы 18, 20 могут быть выполнены за одно целое с качающейся шайбой 16 и могут быть установлены на качающейся шайбе 16 как отдельные от нее детали.
В соответствии с изобретением оси 22, 24 качающихся пальцев 18, 20 образуют угол α, не равный 180°. Угол α между осями 22, 24 качающихся пальцев 18, 20 предпочтительно является регулируемым. Возможность регулировки угла а может быть обеспечена установкой по меньшей мере одного из качающихся пальцев 18 или 20 на качающейся шайбе 16 с возможностью перемещения или перестановки, т.е. качающийся палец 18 или 20 расположен на качающейся шайбе 16, будучи переставляемым или регулируемым по положению. В предпочтительном варианте оси 22, 24 качающихся пальцев 18, 20 образуют угол α от 10° до 170° и/или от 190° до 350°.
Качающиеся пальцы 18, 20 преобразуют вращательное движение ведущего вала 12 в поступательное и/или вращательное движение по меньшей мере одного элемента 26, 28, для чего качающиеся пальцы 18, 20 взаимодействуют с соответствующими элементами 26, 28, причем по меньшей мере один элемент 26, 28 установлен с возможностью направленного линейного перемещения, предпочтительно с возможностью перемещения, направление которого жестко задано направляющей. Элементами 26, 28 являются, во-первых, поршень 30 не показанного на чертежах ударного устройства ручной машины, установленный с возможностью линейного перемещения в направлении оси 34 главного движения ручной машины в направляющей 36, выполненной в виде цилиндра ствола, а во-вторых, уравновешивающий элемент 32.
Конец первого качающегося пальца 18, обращенный в сторону от качающейся шайбы 16, взаимодействует с поршнем 30 ударного устройства посредством поршневого пальца 54. Конец второго качающегося пальца 20, обращенный в сторону от качающейся шайбы 16, взаимодействует с уравновешивающим элементом 32 посредством выемки 56 в уравновешивающем элементе 32.
В первом варианте осуществления изобретения, изображенном на фиг.1 и 2, уравновешивающий элемент 32а установлен с возможностью направленного линейного перемещения в направлении оси 34а главного движения ручной машины посредством двух продольных направляющих, выполненных в виде стержней 46а, 48а, причем в рассматриваемом варианте осуществления изобретения уравновешивающий элемент 32а выполнен в виде дискообразной детали. Стержни 46а, 48а образуют направляющую, жестко задающую ориентацию уравновешивающего элемента, и подходящим образом зафиксированы в ручной машине, предпочтительно своими концами. Они проходят по существу параллельно ведущему валу 12а. Через дискообразный уравновешивающий элемент 32а проходят направляющая 36а поршня 30а, выполненная в виде цилиндра ствола, и ведущий вал 12а, и он имеет два отверстия 50а и 52а, в которых по скользящей посадке расположены стержни 46а, 48а. За счет этого уравновешивающий элемент 32а способен совершать в ручной машине возвратно-поступательное движение параллельно оси 42а вращения ведущего вала 12а, так что один качающийся палец 18а преобразует вращательное движение ведущего вала 12а в поступательное движение поршня 30а, а другой качающийся палец 20а преобразует вращательное движение ведущего вала 12а в поступательное движение уравновешивающего элемента 28а.
Во время работы ручной машины ведущий вал 12а вращается вместе с косой опорой 14а. Ввиду наклонного положения внутренней дорожки качения 40а косой опоры 14а движущиеся в ней тела качения 38а, а с ними и качающаяся шайба 16а, совершают качательное движение, которое за счет направления движения элементов 2ба, 28а преобразуется в линейное возвратно-поступательное движение элементов 26а, 28а. Первый качающийся палец 18а обеспечивает преобразование вращательного движения ведущего вала 12а в совершаемое вдоль оси 34а главного движения ручной машины возвратно-поступательное движение поршня 30а в цилиндре 36а ударного устройства. Одновременно второй качающийся палец 20а обеспечивает преобразование вращательного движения ведущего вала 12а в совершаемое параллельно оси 42а вращения ведущего вала 12а возвратно-поступательное движение уравновешивающего элемента 32а, причем направление оси 42а вращения и направление оси 34а главного движения ручной машины по существу совпадают.
Во втором варианте осуществления изобретения, изображенном на фиг.3 и 4 уравновешивающий элемент 32b установлен с возможностью поворота вокруг оси 58b вращения, вследствие чего качающийся палец 18b преобразует вращательное движение ведущего вала 12b в поступательное движение поршня 30b, а другой качающийся палец 20b преобразует вращательное движение ведущего вала 12b в поступательное и/или вращательное движение уравновешивающего элемента 28b.
Во время работы ручной машины ведущий вал 12b вращается вместе с косой опорой 14b. Ввиду наклонного положения внутренней дорожки качения 40b косой опоры 14b движущиеся в ней тела качения 38b, а с ними и качающаяся шайба 16b, совершают качательное движение, которое за счет направления движения и конструкции крепления элементов 26b, 28b преобразуется в линейное возвратно-поступательное движение и/или вращательное движение элементов 26b, 28b. Первый качающийся палец 18b обеспечивает преобразование вращательного движения ведущего вала 12b в совершаемое вдоль оси 34b главного движения ручной машины возвратно-поступательное движение поршня ЗОЬ в цилиндре 36b ударного устройства. Одновременно второй качающийся палец 20b обеспечивает преобразование вращательного движения ведущего вала 12b в качательное (возвратно-вращательное) движение вокруг оси 58b вращения и/или возвратно-поступательное движение уравновешивающего элемента 32b, параллельное оси вращения 42b ведущего вала 12b, причем направление оси вращения 42b и направление оси 34b главного движения ручной машины по существу совпадают.
Claims (11)
1. Качающийся приводной механизм (10) ручной машины, прежде всего перфоратора и/или отбойного молотка, имеющей ведущий вал (12), содержащий расположенную на ведущем валу (12) косую опору (14) и установленную на косой опоре (14) качающуюся шайбу (16), на которой предусмотрено по меньшей мере два качающихся пальца (18, 20), имеющих оси (22, 24), отличающийся тем, что оси (22, 24) качающихся пальцев (18, 20) образуют угол (α), не равный 180°.
2. Механизм по п.1, отличающийся тем, что оси (22, 24) качающихся пальцев образуют угол (α) от 10 до 170° и/или от 190 до 350°.
3. Механизм по п.1, отличающийся тем, что качающиеся пальцы (18, 20) выполнены с возможностью регулировки угла (α) между их осями (22, 24).
4. Механизм по п.3, отличающийся тем, что возможность регулировки угла (α) обеспечена установкой по меньшей мере одного качающегося пальца (18, 20) на качающейся шайбе (16) с возможностью перемещения или перестановки.
5. Механизм по п.1, отличающийся тем, что один качающийся палец (18) преобразует вращательное движение ведущего вала (12) в поступательное движение одного элемента (26), а другой качающийся палец (20) преобразует вращательное движение ведущего вала (12) в поступательное и/или вращательное движение еще одного элемента (28).
6. Механизм по п.5, отличающийся тем, что по меньшей мере один элемент (26, 28) установлен с возможностью направленного линейного перемещения.
7. Механизм по п.5 или 6, отличающийся тем, что указанными элементами (26, 28) являются поршень (30) ударного устройства ручной машины и/или уравновешивающий элемент (32).
8. Механизм по п.7, отличающийся тем, что уравновешивающий элемент (32) установлен с возможностью направленного движения, по существу, в направлении оси (34) главного движения ручной машины и/или в направлении оси, проходящей в пространстве наклонно к оси (34) главного движения ручной машины.
9. Механизм по п.7, отличающийся тем, что уравновешивающий элемент (32) установлен с возможностью поворота вокруг оси (58) вращения.
10. Механизм по п.7, отличающийся тем, что уравновешивающий элемент (32) выполнен в виде дискообразной и/или U-образной детали.
11. Механизм по п.7, отличающийся тем, что уравновешивающий элемент (32) по меньшей мере частично окружает направляющую (36) поршня (30) и/или ведущий вал (12).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007061716.1 | 2007-12-19 | ||
| DE102007061716A DE102007061716A1 (de) | 2007-12-19 | 2007-12-19 | Taumelantrieb einer Handwerkzeugmaschine |
| PCT/EP2008/064254 WO2009077241A1 (de) | 2007-12-19 | 2008-10-22 | Taumelantrieb einer handwerkzeugmaschine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2010129101A RU2010129101A (ru) | 2012-01-27 |
| RU2497653C2 true RU2497653C2 (ru) | 2013-11-10 |
Family
ID=40202926
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2010129101/02A RU2497653C2 (ru) | 2007-12-19 | 2008-10-22 | Качающийся приводной механизм ручной машины |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US8403075B2 (ru) |
| EP (1) | EP2234768B1 (ru) |
| CN (1) | CN101903133B (ru) |
| DE (1) | DE102007061716A1 (ru) |
| RU (1) | RU2497653C2 (ru) |
| WO (1) | WO2009077241A1 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU193574U1 (ru) * | 2019-08-08 | 2019-11-05 | Федеральное государственное автономное образовательное учреждение высшего образования "Крымский федеральный университет имени В.И. Вернадского" | Механизм ручного перфоратора |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008000677A1 (de) * | 2008-03-14 | 2009-09-17 | Robert Bosch Gmbh | Handwerkzeugmaschine für schlagend angetriebene Einsatzwerkzeuge |
| DE102008000687A1 (de) | 2008-03-14 | 2009-09-17 | Robert Bosch Gmbh | Handwerkzeugmaschine für schlagend angetriebene Einsatzwerkzeuge |
| JP5345893B2 (ja) | 2009-05-08 | 2013-11-20 | 株式会社マキタ | 打撃工具 |
| DE102009044934A1 (de) * | 2009-09-24 | 2011-03-31 | Robert Bosch Gmbh | Pleuelantrieb mit Zusatzschwinger |
| US20110194796A1 (en) * | 2010-02-05 | 2011-08-11 | Schaeffler Technologies Gmbh & Co. Kg | Angled Bore Bearing |
| US8636081B2 (en) | 2011-12-15 | 2014-01-28 | Milwaukee Electric Tool Corporation | Rotary hammer |
| JP5726654B2 (ja) * | 2011-07-01 | 2015-06-03 | 株式会社マキタ | 打撃工具 |
| JP5859249B2 (ja) * | 2011-08-31 | 2016-02-10 | 株式会社マキタ | 打撃工具 |
| JP5756373B2 (ja) * | 2011-08-31 | 2015-07-29 | 株式会社マキタ | 打撃工具 |
| US9156152B2 (en) * | 2011-08-31 | 2015-10-13 | Makita Corporation | Impact tool having counter weight that reduces vibration |
| US9308636B2 (en) | 2012-02-03 | 2016-04-12 | Milwaukee Electric Tool Corporation | Rotary hammer with vibration dampening |
| JP5857851B2 (ja) * | 2012-03-30 | 2016-02-10 | 日立工機株式会社 | 打撃工具 |
| US9808925B2 (en) | 2012-03-22 | 2017-11-07 | Hitachi Koki Co., Ltd. | Impact tool |
| US9630307B2 (en) | 2012-08-22 | 2017-04-25 | Milwaukee Electric Tool Corporation | Rotary hammer |
| DE102013212554B4 (de) | 2013-06-28 | 2023-12-14 | Robert Bosch Gmbh | Handwerkzeugmaschinenantriebsvorrichtung |
| US10883579B2 (en) * | 2013-12-20 | 2021-01-05 | Robert Bosch Tool Corporation | Oscillating mechanism for a power tool |
| DE102014200393A1 (de) * | 2014-01-13 | 2015-07-16 | Metabowerke Gmbh | Schlagwerkseinheit |
| CN104159179B (zh) | 2014-06-30 | 2018-12-04 | 歌尔股份有限公司 | 扬声器模组 |
| EP3028818A1 (de) * | 2014-12-03 | 2016-06-08 | HILTI Aktiengesellschaft | Handwerkzeugmaschine |
| JP6510250B2 (ja) * | 2015-01-29 | 2019-05-08 | 株式会社マキタ | 作業工具 |
| DE102015203487A1 (de) | 2015-02-26 | 2016-09-01 | Ecoroll Ag Werkzeugtechnik | Festhammervorrichtung zum Beeinflussen von Werkstücken und zugehöriges Verfahren |
| DE102018214092A1 (de) * | 2018-08-21 | 2020-02-27 | Robert Bosch Gmbh | Umschaltvorrichtung für einen Bohrhammer und Bohrhammer mit einer Umschaltvorrichtung |
| US11453093B2 (en) | 2019-06-24 | 2022-09-27 | Black & Decker Inc. | Reciprocating tool having planetary gear assembly and counterweighting assembly |
| CN110722607B (zh) * | 2019-10-18 | 2021-08-31 | 苏州劲山电动工具有限公司 | 一种平衡手持式工具高频摆动机构振动的结构 |
| US11529727B2 (en) | 2019-10-21 | 2022-12-20 | Makita Corporation | Power tool having hammer mechanism |
| CN111529352B (zh) * | 2020-05-16 | 2022-10-04 | 钟志民 | 摇摆冲击的筋膜枪 |
| US11958121B2 (en) | 2022-03-04 | 2024-04-16 | Black & Decker Inc. | Reciprocating tool having orbit function |
| US12343809B2 (en) | 2022-03-09 | 2025-07-01 | Black & Decker Inc. | Reciprocating tool having orbit function |
| US11839964B2 (en) | 2022-03-09 | 2023-12-12 | Black & Decker Inc. | Counterbalancing mechanism and power tool having same |
| US20250058446A1 (en) * | 2023-08-18 | 2025-02-20 | Milwaukee Electric Tool Corporation | Transverse axis rotary hammer |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1414520A1 (ru) * | 1986-05-16 | 1988-08-07 | Всесоюзный Государственный Научно-Исследовательский И Проектный Институт "Вниипроектэлектромонтаж" | Ручна машина |
| SU1613315A1 (ru) * | 1988-09-02 | 1990-12-15 | М.И.Морозов | Ручна машина ударно-вращательного действи |
| WO2005092575A1 (de) * | 2004-03-16 | 2005-10-06 | Wacker Construction Equipment Ag | Taumelfingergetriebe |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1074821A (en) * | 1965-02-17 | 1967-07-05 | P & O Res & Dev Co | Improvements in reciprocating engines |
| DE3427342A1 (de) | 1984-07-25 | 1986-01-30 | Robert Bosch Gmbh, 7000 Stuttgart | Bohrhammer |
| US5050307A (en) * | 1990-03-01 | 1991-09-24 | Milwaukee Electric Tool Corporation | Wobble plate drive |
| JP3422186B2 (ja) * | 1995-11-24 | 2003-06-30 | 株式会社豊田自動織機 | 可変容量圧縮機 |
| US5555626A (en) * | 1995-11-27 | 1996-09-17 | S-B Power Tool Company | Reciprocating drive mechanism |
| US6212781B1 (en) * | 1998-10-09 | 2001-04-10 | Milwaukee Electric Tool Corporation | Reciprocating saw |
| DE19851888C1 (de) | 1998-11-11 | 2000-07-13 | Metabowerke Kg | Bohrhammer |
| US6481979B2 (en) * | 2000-12-26 | 2002-11-19 | Visteon Global Technologies, Inc. | Lubrication passage and nozzle for swash plate type compressor |
| DE102004026845A1 (de) * | 2004-06-02 | 2005-12-22 | Robert Bosch Gmbh | Handwerkzeugmaschine, insbesondere Bohr- und/oder Schlaghammer |
| JP4863942B2 (ja) * | 2006-08-24 | 2012-01-25 | 株式会社マキタ | 打撃工具 |
-
2007
- 2007-12-19 DE DE102007061716A patent/DE102007061716A1/de not_active Withdrawn
-
2008
- 2008-10-22 EP EP08861422A patent/EP2234768B1/de active Active
- 2008-10-22 WO PCT/EP2008/064254 patent/WO2009077241A1/de not_active Ceased
- 2008-10-22 CN CN2008801214354A patent/CN101903133B/zh active Active
- 2008-10-22 RU RU2010129101/02A patent/RU2497653C2/ru not_active IP Right Cessation
- 2008-10-22 US US12/809,936 patent/US8403075B2/en active Active
-
2013
- 2013-03-26 US US13/850,493 patent/US20130213682A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1414520A1 (ru) * | 1986-05-16 | 1988-08-07 | Всесоюзный Государственный Научно-Исследовательский И Проектный Институт "Вниипроектэлектромонтаж" | Ручна машина |
| SU1613315A1 (ru) * | 1988-09-02 | 1990-12-15 | М.И.Морозов | Ручна машина ударно-вращательного действи |
| WO2005092575A1 (de) * | 2004-03-16 | 2005-10-06 | Wacker Construction Equipment Ag | Taumelfingergetriebe |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU193574U1 (ru) * | 2019-08-08 | 2019-11-05 | Федеральное государственное автономное образовательное учреждение высшего образования "Крымский федеральный университет имени В.И. Вернадского" | Механизм ручного перфоратора |
Also Published As
| Publication number | Publication date |
|---|---|
| US8403075B2 (en) | 2013-03-26 |
| RU2010129101A (ru) | 2012-01-27 |
| WO2009077241A1 (de) | 2009-06-25 |
| EP2234768A1 (de) | 2010-10-06 |
| US20100270046A1 (en) | 2010-10-28 |
| CN101903133A (zh) | 2010-12-01 |
| CN101903133B (zh) | 2013-05-08 |
| DE102007061716A1 (de) | 2009-06-25 |
| EP2234768B1 (de) | 2012-12-12 |
| US20130213682A1 (en) | 2013-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2497653C2 (ru) | Качающийся приводной механизм ручной машины | |
| JP4863942B2 (ja) | 打撃工具 | |
| US7604071B2 (en) | Power tool with vibration reducing means | |
| US8464805B2 (en) | Hand-held power tool for percussively driven tool attachments | |
| CN101623861A (zh) | 作业工具 | |
| CN101032814B (zh) | 具有振动控制机构的冲击工具 | |
| RU2492041C2 (ru) | Ручная машина с виброзащищенной рукояткой (варианты) | |
| RU2434733C2 (ru) | Ручная машина, прежде всего перфоратор и/или отбойный молоток | |
| JP5767511B2 (ja) | 往復動式作業工具 | |
| CN102962819A (zh) | 打击工具 | |
| US20070163370A1 (en) | Wobble drive | |
| US4038721A (en) | Reciprocating blade saw | |
| CN102510792B (zh) | 具有附加振荡器的连杆驱动装置 | |
| RU2454312C2 (ru) | Ручная машина с ударным механизмом | |
| JP4647943B2 (ja) | 往復作動式工具 | |
| CN1520349A (zh) | 手持工具机,尤其是钻孔机和/或风錾 | |
| JP3851083B2 (ja) | クランク伝動装置における質量バランス手段を有する作業装置 | |
| US20080047720A1 (en) | Hand-held power tool with an air spring percussion mechanism having a crank drive | |
| CN102510791B (zh) | 具有冲击机构组件和用于补偿电动工具的振动的平衡质量的电动工具 | |
| US1604681A (en) | Power-converting device | |
| CN101331007A (zh) | 手持式减振动力工具 | |
| CN215163665U (zh) | 一种传动轮结构 | |
| US8276471B2 (en) | Vibration generator | |
| JP2724849B2 (ja) | 連続衝撃発生装置 | |
| HK1096901A (en) | Wobble drive |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20201023 |