WO2010143573A1 - 物体認識用画像データベースの作成方法、作成装置および作成処理プログラム - Google Patents
物体認識用画像データベースの作成方法、作成装置および作成処理プログラム Download PDFInfo
- Publication number
- WO2010143573A1 WO2010143573A1 PCT/JP2010/059352 JP2010059352W WO2010143573A1 WO 2010143573 A1 WO2010143573 A1 WO 2010143573A1 JP 2010059352 W JP2010059352 W JP 2010059352W WO 2010143573 A1 WO2010143573 A1 WO 2010143573A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- registered
- vector
- value
- recognition
- identifier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/58—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually
- G06F16/583—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using metadata automatically derived from the content
Definitions
- the present invention relates to an object recognition image database creation method, creation apparatus, and creation processing program. More specifically, when there is a set whose elements are data, this is a data structure that associates the value assigned to each data (key) based on that key, and allows data by allowing false positives (False Positive)
- the present invention relates to a compressed representation of a feature vector using an associative data structure for compressing capacity and its application to specific object recognition.
- Identified object recognition is a task that recognizes an instance of an object.
- specific object recognition using a local feature such as SIFT (for example, see Non-Patent Document 1) will be described.
- the local feature amount is a real-valued vector having several tens to several hundreds of dimensions, and has high discrimination, so that it is suitable for the purpose of identifying a large number of objects.
- the basic recognition process is a process of collating a local feature obtained from an unknown object with a local feature obtained from a known object.
- Non-Patent Document 5 scalar quantization
- selection of feature vectors see, for example, Non-Patent Document 6 and Non-Patent Document 4.
- scalar quantization see, for example, Non-Patent Document 5
- selection of feature vectors see, for example, Non-Patent Document 6 and Non-Patent Document 4.
- the present invention has been made in view of the above circumstances, and provides a value assigned to each “key” as an element of a data set based on the key in order to solve the above-described problems.
- a method for creating and retrieving a spatially efficient image database using an associative data structure is provided.
- the associative data structure is a combination of data structures that allow false positives as a price to compress data capacity, that is, to reduce the amount of memory required for data storage and to obtain high space efficiency.
- the data structure is used to check (search) whether or not a certain key is registered in a state where a large number of keys are registered.
- the above-mentioned false positives may occur when a search returns a value that is not assigned to that key, or a value may be returned even though the key is not registered That is.
- the data structure can be said to be a stochastic data structure. In other words, even if there is no guarantee that the correct answer is obtained and an incorrect result may be returned, the probability of returning the incorrect result should be low enough that there is no practical problem.
- One option is to allow false positives in order to reduce the amount of memory needed to create the database.
- the present invention provides a feature extraction step of extracting a plurality of feature vectors representing local features of an image from an image of an object to be registered in the object recognition image database; A registration step of registering each feature vector extracted from a certain object so that an identifier pre-assigned to the object can be associated with the data structure with respect to a data structure capable of determining whether or not it has been registered
- the computer executes each step, and an object of registration is assigned an identifier of n bits (n is a natural number), and the registration step is for zero value registration and one value registration of each bit of the identifier. For the prepared 2 ⁇ n data structures, either one of zero value registration and one value registration for each bit according to the identifier of the object from which each feature vector is extracted.
- Each of the feature vectors is registered in a data structure, and the image database is configured to perform recognition processing on whether or not the same object is registered when an image of an object is given as a search question.
- the recognition process extracts a plurality of feature vectors from the search question as a search question vector, checks whether or not a feature vector equivalent to each search question vector is registered in each data structure, and all When a feature vector of the same value is registered for either zero value or 1 value for n bits, an n-bit value corresponding to the value of each registered bit is obtained as a candidate for an identifier, and obtained for each search query vector.
- Object recognition image database characterized by finding candidate identifiers that match search queries Provides a method of creating.
- the present invention provides a feature extraction unit that extracts a plurality of feature vectors representing local features of an image from an image of an object to be registered in the object recognition image database, and data
- a data structure part consisting of a set of data structures that can be determined and whether or not certain data has been registered, and an identifier pre-assigned to each object from each feature vector extracted from a certain object are derived from the feature vector
- the feature vector is registered in one of the data structures for zero value registration and one value registration of each bit according to the body identifier, and the image database is given an image of an object as a search query Accessed by a recognition device that performs recognition processing of whether or
- the present invention has a feature extraction process for extracting a plurality of feature vectors representing local features of an image from an image of an object to be registered in the object recognition image database, and data can be registered.
- a registration process for registering each feature vector extracted from a certain object so that an identifier pre-assigned to the object is associated with the data structure for a data structure that can determine whether or not the data has been registered;
- the object related to the registration is assigned an identifier of n bits (n is a natural number), and the registration process is prepared for zero value registration and one value registration of each bit of the identifier. For 2 ⁇ n data structures, either one of zero-value registration data and one-value registration data for each bit according to the identifier of the object from which each feature vector is extracted.
- Each of the feature vectors is registered in a structure, and the image database is processed by the computer or another computer to perform a recognition process as to whether or not the same object is registered when an image of the object is given as a search question. Accessed, the recognition process extracts a plurality of feature vectors from the search question as a search question vector, checks whether a feature vector equivalent to each search question vector is registered in each data structure, and all bits When a feature vector of the same value is registered for either zero value or 1 value for n, an n-bit value corresponding to each registered bit value is obtained as an identifier candidate, and the candidate obtained for each search query vector
- a database of object recognition images, characterized by finding identifiers that match search queries Provides a processing program.
- the registration step includes features for 2 ⁇ n data structures prepared for zero value registration and one value registration of each bit of the identifier.
- the feature vector is registered in one of the data structures for zero value registration and one value registration of each bit, so that the feature vector is for zero value of each bit or 1
- the identifier value can be associated with the feature vector based on whether or not the data structure is registered in the data structure for the value. Since the data structure compresses the data capacity by allowing false positives, a larger-scale object recognition image database can be realized with the same amount of memory as in the past. As shown in FIG. 9, FIG. 10, FIG. 15, FIG. 16, and the like, which will be described later, the present invention can further reduce the amount of memory when compared with a method of performing an approximate nearest neighbor search using a hash table. It has been experimentally verified.
- a specific example of what can be applied as the data structure is a Bloom filter
- a specific example of what can be applied as the associative data structure is a Bloomier filter (Bloomier Filter, For example, see Non-Patent Document 6).
- the blue mire filter is a data structure known as a technique for associating values assigned to a plurality of keys as elements to be registered based on the keys.
- an association means a mechanism that allows a value associated with a key to be obtained in a short time by a predetermined data structure when a key is given. It can be said that the value associated with is obtained.
- a bluemere filter is generally composed of a plurality of bloom filters (m-bit bit array) having a plurality of common hash functions, and each bloom is obtained using a hash value obtained from each hash function when a certain key is given.
- a value associated with the key can be obtained based on the reference result by referring to the filter. Details thereof will be described later.
- What is registered in the object recognition image database of the present invention is an image representing an object, and a search question (query) is also given as an image. If an object matching the object represented by the search query image can be searched from the image database, it can be said that the object has been recognized. In such object recognition, it is important to complete the object recognition in a short time and to realize an image database with a small amount of memory. The two are often in a trade-off relationship, but the present invention has a problem of reducing the amount of memory among them. In other words, this is an effective technique for constructing an image database in which a large amount of image data is registered.
- the above-described effects are the same for the object recognition image database creation apparatus and creation processing program according to the present invention.
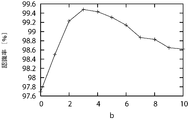
- FIG. 6 is a graph showing the recognition rate of an object when t is changed in the method of the present invention (Experiment 2, 5000 2D object recognition experiment).
- FIG. 6 is a first graph showing the effectiveness of an error detection blue mia filter in the method of the present invention (55 three-dimensional object recognition experiments).
- FIG. It is the 2nd graph which shows the effectiveness of an error detection blue mia filter in the method of this invention (recognition experiment of 55 three-dimensional objects).
- It is a 3rd graph which shows the effectiveness of an error detection blue mia filter in the method of this invention (recognition experiment of 5000 two-dimensional objects).
- FIG. 11 is a fourth graph showing the effectiveness of an error detection blue mia filter in the method of the present invention (recognition experiment of 5000 two-dimensional objects).
- FIG. It is the 1st explanatory view explaining the example of database creation processing concerning this invention. It is the 2nd explanatory view explaining the example of database creation processing concerning this invention.
- each data structure may reduce the capacity of a memory for storing data by allowing false positives.
- the registration step applies a predetermined rule to obtain a value for error detection related to the identifier, registers the obtained value in the data structure for error detection, and the recognition process
- the candidate and the value registered in the error detection data structure are collated, and if the two match, the determination result for the search query vector is subject to statistical processing, and if not, the subject is not subject to statistical processing Also good.
- the registration step obtains an error detection value by applying a predetermined rule to the identifier value, and further registers the obtained value in the error detection data structure.
- the error detection data structure is It is possible to search for an image related to the search query vector with higher accuracy than when not using it.
- the error detection value may be composed of at least one bit, and the error detection data structure may be prepared for registering a bit zero value and for registering a single value.
- the number of bits for which it is determined that the same search query vector is registered in both data structures for zero value and one value registration because of false positive is a predetermined number. May exceed the determination result for the search question vector from the target of statistical processing. In this way, when a value exceeding a predetermined number is obtained as an identifier of an image related to a certain search query vector due to a so-called false positive, the determination result including many erroneous values is excluded from a specific basis. Thus, it is possible to search for an image related to the search query vector with higher accuracy than when the exclusion is not performed.
- the recognition process gives a predetermined score to an identifier value determined to be related to the search question vector, and there is no identifier determined to be related to the search question vector.
- the identifier that has obtained the highest score may be determined based on statistical processing on the search question vector extracted from the search question without giving a score to any identifier. In this way, even if the determination result of a plurality of search query vectors is majority processed, so-called voting processing, even if the probability that each individual determination result is correct is not 100%, an appropriate result can be obtained by majority processing. .
- the data structure may be a Bloom filter.
- each data structure may have a number m of bits (m is a natural number) constituting the data structure larger than a predetermined maximum number of registered vectors. More preferably, m is determined such that each data structure after each registration vector is registered is in a sparse state that includes moderately zero-valued bits. In this way, it is possible to reduce the probability of erroneous detection of the data structure, that is, the probability of occurrence of false positives. However, if m is made too large, the space efficiency decreases. The designer may determine a reasonable value experimentally or empirically from the balance between the two. The various preferable aspects shown here can also be combined.
- Non-Patent Document 7 In specific object recognition using local features, reducing the amount of memory is an important issue.
- Conventional methods for reduction include those that perform vector quantization of feature vectors (see Non-Patent Document 7) and those that perform scalar quantization (see Non-Patent Document 3).
- the former method of vector quantization reduces the amount of memory by replacing multiple feature vectors with representative vectors called Visual ⁇ Word.
- Visual ⁇ Word representative vectors
- the amount of memory is reduced by scalar quantization of each dimension of the feature vector.
- This method is effective even for large-scale object recognition to some extent, but even if the number of feature vectors is expressed in 1 bit, the amount of memory increases in proportion to the number of feature vectors. There are limits to recognition. For this reason, there is a limit to the method for reducing the capacity of the feature vector itself.
- the amount of memory is reduced by storing only the pointer to the recording location in the main memory.
- the amount of memory is reduced by selecting feature vectors effective for recognition. Even with this method, in order to perform large-scale object recognition, there is a limit to the number of feature vectors that can be reduced, and if the number beyond that is reduced, the recognition rate decreases.
- Noguchi's method is based on PCA-SIFT (for example, Y. Ke and R. Sukthankar: "PCA-SIFT: A more distinctive representation for local image descriptors", Proc. Of CVPR2004, Vol. 2, pp. 506-513 ( This is a specific object recognition method using the 36-dimensional feature vector obtained in 2004).
- the method of Noguchi et al. Is divided into a database creation process for registering a feature vector in a hash table and a recognition process for recognizing an object based on a voting process using this database.
- specific processing will be described. 2-1. Create database
- the index to be registered in the hash table is obtained from the hash function.
- H size is the size of the hash table.
- the object ID for the feature vector p is registered in the obtained index.
- the object ID corresponds to the “identifier” of the present invention.
- the index of the hash table is obtained in the same manner as the database creation process using the feature vector obtained from the question image by PCA-SIFT. Then, all the object IDs registered in the obtained hash index are voted. This process is performed on all feature vectors obtained from the question image, and finally the object having the largest number of votes is used as the recognition result. Specific processing will be described below.
- the index of the hash table is obtained from the feature vector obtained from the question image.
- a threshold value b is provided for the number of dimensions to be processed. Thereby, in the most cases, the number of bit vectors u ′ used for the search is suppressed to 2 b .
- a plurality of discriminators as shown in FIG. 1 are arranged in series in order to improve processing efficiency.
- This multi-stage configuration can also be applied to the present invention.
- the processing when the question image is applied to the recognizer will be specifically described.
- the question image is recognized by repeating this process.
- the feature of the recognition method by the multi-stage of the classifier is that, when the stage of the classifier moves, the difference searchability is such that recognition is performed using a bit vector other than the bit vector used for the search in the previous stage. That is. For this reason, even if the discriminator moves to the final stage discriminator, it can be recognized in substantially the same processing time as that using 2 b bit vectors from the beginning. 2-3. Problems of Noguchi's method
- the present invention uses a data structure that compresses the capacity of data by allowing false positives as a data structure that is much more space efficient than a hash table.
- An example of a specific configuration of the data structure is a Bloom filter, and an example of a specific configuration of the associative data structure is a blue mire filter. 3. Bloom filter and bluemere filter
- a Blue Mire filter (see Non-Patent Document 6) applicable as an associative data structure according to the present invention and a Bloom filter as a basis thereof (for example, BH Bloom: “Space / Time Trade-offs in Hash Coding with Allowable Errors ", Commun. ACM, Vol. 13, No. 7, pp. 422-426 (1970)).
- BH Bloom “Space / Time Trade-offs in Hash Coding with Allowable Errors ", Commun. ACM, Vol. 13, No. 7, pp. 422-426 (1970)
- Bloom filters are much more space efficient data structures compared to balanced binary search trees and hash tables.
- This Bloom filter is used to determine whether an element is a member of a data set given a data set and element.
- This method has the problem that the possibility of false positive (False Positive) that is determined to be a member of a set even though an element is not a member of the data set, or the original from the data set There is a problem that the element cannot be extracted.
- this method has an advantage that any number of elements can be added to the data set without increasing the amount of memory. Of course, the more elements are added, the higher the possibility of false positives, but the number of elements that can be stored with the same amount of memory is overwhelmingly large compared to balanced binary search trees and hash tables.
- the bloom filter is used for the compression expression of the feature vector by utilizing the good space efficiency.
- the discussion proceeds with the elements of the data set as feature vectors.
- specific processing of the feature vector registration method to the Bloom filter and the feature vector recognition method will be described.
- FIG. 2 shows a flow of feature vector registration processing.
- an m bit array is prepared as an empty Bloom filter, and all bits are initialized with 0.
- m is referred to as “TableSize”.
- k hash functions are prepared, and a hash value is calculated for each hash function using a feature vector as a key.
- the obtained hash value is an integer value of 1 to m.
- a hash value is obtained from each hash function using the feature vector as a key. If all the bits corresponding to the obtained hash value are 1, it is assumed that the feature vector is included in the data set. 3-2. Blue Mia Filter
- a Bloomier filter is a data structure used to associate a value associated with a registered feature vector by using a plurality of Bloom filters.
- this method also has the problem that there is a possibility of false positives and the problem that the original feature vector cannot be extracted from the data set, it is overwhelmingly more space efficient than a hash table.
- this property is used, and the blue mia filter is used for specific object recognition.
- the operation of the blue mia filter will be described in detail.
- an object ID used for recognizing a specific object by using the operation of the above-described blue mire filter.
- the object ID is expressed by n bits, this is realized by preparing two Bloom filters for each bit.
- N Bloom filters are required, but log 2 N Bloom filters can be obtained by using a Bluemire filter. Can identify an object. 4.
- the number of feature vectors obtained from all objects whose i-th bit is 0 when the object ID is expressed in bits is the value of M
- a feature vector is registered for n Bloom filters. For example, when expressing an object ID in 2bit, When expressed in the third object ID "10", 1 bit-th bit string is "1", for 2 bit-th is "0", Y 1 and The feature vector obtained from the object with the object ID 3 is stored in the X 2 Bloom filter. Specific processing will be described below.
- the bit vector u is created using the d dimension of the feature vector, as in the method of Noguchi et al.
- the feature vector converted to the bit vector is considered not very effective for recognition and is not registered in the database.
- the obtained bit vector u is used as a key, and k hash functions are used to determine which bit of the Bloom filter is set to 1.
- k 8 and the hash function is General Purpose Hash Function Algorithms, [online], searched on June 3, 2009, ⁇ URL: http://www.partow.net/programming/ hashfunctions / index.html # RSHashFunction.>
- the above processing is performed on all feature vectors to create a database.
- the original feature vector cannot be extracted from the database.
- the feature vector can be expressed by compressing the amount of memory considerably rather than storing the original feature vector as it is. . 4-2.
- the feature vector obtained from the question image is generally different from the feature vector used for database creation for each dimension value. For this reason, in this embodiment as well, in the same way as the method of Noguchi et al., An allowable variation width e of each dimension value is provided to deal with the variation.
- the i th bit of the object ID is set to 0, and if it exists in the Bloom filter Y i , the i th bit of the object ID is set to 1. If it is not included in both X i and Y i , the feature vector using this bit vector as a key is not registered in the database, and the i-th and subsequent processes are terminated.
- the process can be terminated at an intermediate stage, so that the recognition process can be performed efficiently.
- a process for detecting a voting error at the time of voting is also proposed.
- a bluemear filter for error detection is also created. This is a simple error detector for deciding whether or not to actually vote for an ID obtained by recognition processing using a feature vector obtained from a certain search query image.
- This error detection blue mia filter is created as follows. First, two Bloom filters P 0 and P 1 are prepared. When the object ID is expressed in 2 bits, a feature vector obtained from an even number of object IDs is registered in P 0 and a feature vector obtained from an odd number of object IDs is registered in P 1 To do.
- the TableSize of each Bloom filter is given in the same way as Equation (4).
- the recognition process it is determined using an error detection blue mia filter whether or not to vote for the object with the obtained object ID. At this time, if it is not registered in the error detection blue mia filter, or if it is registered in both, the determined object ID is determined to be an incorrect ID and voting is not performed.
- the Bloom filter for registering the feature vector is determined.
- the object ID3 is expressed by 2 bits
- a bit string of 10 is assigned to the object ID3.
- the Bloom filter Y 1 that associates the first digit in the bit string with 1 and the second digit in the bit string 0 registers the feature vector Bloom filter X 2 reminds.
- the object ID expressed in bit column 1 because an odd number appears, it registers the feature vector to the error detection Bloom filter P 1.
- the feature vector obtained from the object with the object ID 3 is registered in the procedure as shown in FIG.
- a bit vector is created using the d dimension from the first dimension of the feature vector obtained from the object of object ID3.
- P 1 (24, -500, 249, 32)
- P 2 (239, 123, -11, -57)
- d 3
- P 1 , P 2 ...
- u 1 (1, 0, 1)
- u 2 (1, 1, 0)
- the feature vectors converted to this bit vector are considered to be not effective for recognition because they are similar, and are used for subsequent processing. Not in.
- each Bloom filter has all elements 0 (zero). It is.
- first, k 3 hash values are obtained from the k hash functions described above using the bit vector u 1 as a key. If the obtained hash values are 1, 2, and 4, the first , second , and fourth bits of the Bloom filters Y 1 , X 2 , and P 1 initialized to (00000000) are set to 1. Y 1 , X 2 , and P 1 after u 1 registration are all (11010000) (see FIG. 23A).
- Bloom filter Y 1 is (11011010).
- a hash value is obtained for the bit vector u 1 ′ obtained from the feature vector q1 of the search question, since u 1 ′ is the same value as u 1 at the time of registration, hash values 1, 2, and 4 similar to those in the registration process are obtained. Is obtained. Bloom Filter Y 1 's 1 , 2 and 4th bits are all 1's. In this case, q 1 is determined to be registered in the Bloom filter Y 1 .
- the Bloom filter may be determined to be registered even though it is not registered.
- q 2 is a feature vector that is not actually registered in the Bloom filter.
- the hash values obtained from the bit vector u 2 ′ obtained from q 2 are 2, 4, and 5.
- the i-th bit of the object ID is set to 0.
- the i-th bit of the object ID is set to 1. If the feature vector is registered in Y 1 and X 2 , the bit string of the object ID is “10”, so the object of ID 3 is voted.
- the Bloom filter has a false positive and it is determined that a feature vector is registered in both X i and Y i .
- the present invention tries both possibilities. That is, for the search query feature vector, as shown in FIG. 23, voting is performed for both an object whose i-th bit is 0 and an object whose object ID is 1. For example, if it is determined as a result of the search processing that a search query feature vector has been registered in X 1 , Y 1 , and X 2 , two ID candidates of object ID bit strings 00 and 10 are prepared. Then, an object ID that may be voted on is determined by referring to the error detection Bloom filter.
- the above search process and voting process are performed on all feature vectors obtained from the search query image.
- the object having the largest number of votes is finally set as the recognition result.
- the votes may be weighted. For example, when the number of feature vector object ID is registered in the database are extracted from the object i is N i number may be voting with a weight of 1 / ⁇ N i to vote for the object ID .
- FIG. 3 shows an example of a three-dimensional object used in this experiment.
- images taken by rotating an object every 5 ° with a web camera from an angle of 15 ° and 30 ° upward from the front in front of the object were used.
- the webcam is manufactured by Logitech Co., Ltd., product type name Qcam (registered trademark) Pro 9000, resolution: 640480.
- database creation images 36 images with rotation angles of 0 °, 10 °,..., 350 ° ⁇ 108 in 3 directions were used per object, and the remaining images were used as search query images.
- the number of feature vectors obtained from the database creation image is about 1.2 million.
- FIG. An example is shown in FIG. During collection, images with a size of 600 ⁇ 600 pixels or less were excluded, and the image was reduced so that the long side of the image was 640 pixels or less. Also excluded are images that have 100 or fewer feature vectors. The number of feature vectors obtained from the database creation image is about 10 million.
- Search query images were prepared as follows. First, a total of 500 images in the database, 100 images collected from Google Image Search, 200 images obtained from the PCA-SIFT site, and 200 images collected from Flickr, were randomly selected. Selected. Next, these images were printed on A4 paper using a color laser printer (product name: C5200n, manufactured by Oki Data Corporation), and the camera (product name: EOS Kiss Digital, manufactured by Canon Inc., 6.3 million pixels). , And attached lens model name: EF-S (18-55mm) USM).
- FIG. 5 An example of the photographed image is shown in FIG. As shown in FIG. 5, the angle ⁇ of the optical axis of the camera with respect to the paper surface was changed to 90 °, 75 °, and 60 ° in an arrangement in which the entire paper surface was captured. A part of the paper was photographed at an angle of 90 °. As a result, a total of four images were obtained on one sheet of paper. Furthermore, the captured image was reduced to 512 x 341 pixels, and the feature vector was obtained by PCA-SIFT.
- the feature vector storage capacity a and the number of dimensions t for dealing with false positives were also changed to examine the object recognition rate.
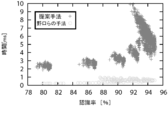
- the horizontal axis shows the recognition rate, and the vertical axis shows the processing time.
- Fig. 8 shows an example of comparison of recognition rates when b is changed.
- the method of the present invention requires a longer processing time for recognition of a single sheet than the method of Noguchi et al., Some results are obtained with a slightly better object recognition rate.
- the method of Noguchi et al. It is possible to vote just by searching the hash table once for one search question vector q.
- 2n Bloom filters are used as the cause of the recognition process taking time. It is mentioned that you can't vote without searching.
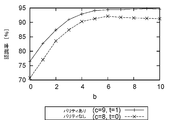
- Fig. 14 shows an example of comparison of recognition rates when b is changed.
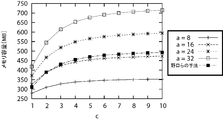
- FIG. 15 shows the result of comparing the amount of memory required for the recognition processing when the parameter c is changed between the method of changing the parameter a of the method of the present invention and the method of Noguchi et al.
- the horizontal axis shows the parameter c
- the vertical axis shows the memory amount.
- FIG. 17 shows the experimental results.
- the horizontal axis shows the recognition rate
- the vertical axis shows the average processing time taken to recognize one sheet. From the experimental results, when the amount of memory to be used is almost the same, the method of the present invention takes much processing time compared with the comparative method, but the recognition rate can be considerably improved by the parameters. From this, it can be said that the method of the present invention can efficiently compress the feature vector representation.
- the present invention has proposed a technique using a Blue Mia filter that is much more space efficient than a hash table or the like as a technique for reducing the amount of memory without calculating feature vector distances.
- a technique using a Blue Mia filter that is much more space efficient than a hash table or the like as a technique for reducing the amount of memory without calculating feature vector distances.
- the method using a hash table was compared with the present invention, and its effectiveness was verified.
Landscapes
- Engineering & Computer Science (AREA)
- Library & Information Science (AREA)
- Theoretical Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Image Analysis (AREA)
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
Abstract
Description
これまでに、特徴ベクトルをVisual Word (例えば、非特許文献3参照)と呼ばれる代表ベクトルに置換することで必要なメモリ量を削減する手法が提案されている。この手法は、画像に写っている物体のクラス(例えば、一般的な「車」というカテゴリー)を認識する「一般物体認識」には有効な手法といえる。しかし、画像中の物体のインスタンス(例えば、前者の「車」というカテゴリーの中の特定のモデル名)まで認識する「特定物体認識」への適合性は高いとはいえない。大規模な特定物体認識を行うためには、Visual Wordの数を多くしなければならない。高い認識率を得るためには、一つのVisual Wordに2~3個の特徴ベクトルを対応付けるのが限界でありそれより多くの特徴ベクトルを一つのVisual Wordで代表させるようにすると認識率が低下してしまう(例えば、非特許文献4参照)。特定物体認識におけるメモリ量削減の決め手にはなり得ない。
このような物体認識では、短時間のうちに物体認識が完了すること、および、少ないメモリ量で画像データベースを実現することが重要である。両者は、しばしばトレードオフの関係にあるが、この発明は、どちらかといえば、それらのうちメモリ量の削減に課題の重点がある。即ち、多量の画像データが登録される画像データベースを構築するときに有効な手法である。
以上の作用効果は、この発明による物体認識用画像データベースの作成装置および作成処理プログラムについても同様である。
この発明の物体認識用画像データベースの作成方法において、各データ構造は、偽陽性を許容することによりデータを格納するメモリの容量を削減するものであってもよい。
前記登録工程は、所定の規則を適用して前記識別子に係る誤り検出用の値を得、得られた値を前記誤り検出用のデータ構造に登録し、前記認識処理は、得られた識別子の候補と前記誤り検出用データ構造に登録された値とを照合し、両者が一致する場合は前記検索質問ベクトルについての判定結果を統計処理の対象とし、一致しない場合は統計処理の対象としなくてもよい。このようにすれば、前記登録工程は、前記識別子の値に所定の規則を適用して誤り検出用の値を得、得られた値を前記誤り検出用データ構造にさらに登録するので、検索質問ベクトルがあるビット桁のゼロ値にも1値にも登録されていると判断された場合にも、誤り検出用データ構造に登録された値との整合性を判定し、誤り検出用データ構造を用いない場合よりも高い精度で検索質問ベクトルに関連する画像を検索することができる。
また、前記誤り検出用の値が少なくとも1ビットからなり、前記誤り検出用データ構造は、ビットのゼロ値登録用と1値登録用としてデータ構造が用意されてなるものでもよい。このようにすれば、2×n個の前記データ構造を用いて識別子を連想する連想データ構造が構成されるところ、さらに前記データ構造を追加することにより検出用データ構造を構成することができる。
また、前述の作成方法および検索方法において、各データ構造は、それを構成するビットの数m(mは自然数)が予め定められた登録ベクトルの最大数よりも大きくてもよい。より好ましくは、mは、各登録ベクトルが登録された後の各データ構造が、適度にゼロ値のビットを含む疎な状態になるように決定される。このようにすれば、データ構造の誤検出の確率、即ち、偽陽性の発生確率を低い値にすることができる。ただし、あまりmを大きくしすぎると空間効率が低下する。設計者は、両者の兼ね合いから実験的にあるいは経験的に妥当な値を決定すればよい。
ここで示した種々の好ましい態様は、それら複数を組み合わせることもできる。
この発明の詳細な説明に先立ち、その技術的意義を把握しやすくするために関連研究について、少し詳しく説明しておく。
1. 関連研究について
2. 野口らの手法
2-1. データベース作成


2-2. 認識処理


以上の処理を行うことで、ハッシュ表に登録されている物体IDに投票を行い、最も得票数の多い物体を認識結果とする。
2-3. 野口らの手法の課題
またHsize = 2dとした予備実験により、約一千万個のPCA-SIFT特徴ベクトルを野口らの手法でハッシュ表にマッピングしてみたところ、d=24のとき65%以上、d=28のとき96%以上のハッシュインデックスが、一つの特徴ベクトルにも対応しない、またはリストが削除された状態となっていることが分かった。以上から、野口らの手法には、ハッシュ表の空間効率の観点から、なお改善の余地があるといえる。
この課題に対処すべく、この発明ではハッシュ表と比べると、はるかに空間効率の良いデータ構造として、偽陽性を許容することによりデータの容量を圧縮するデータ構造を用いることにした。前記データ構造の具体的な構成の一例は、ブルーム・フィルタであり、前記連想データ構造の具体的な構成の一例は、ブルーミア・フィルタである。
3. ブルーム・フィルタとブルーミア・フィルタ
3-1. ブルーム・フィルタ
3-2. ブルーミア・フィルタ
4. この発明の手法
4-1. データベース作成



4-2. 物体認識
4-3. 誤り検出
前節で述べたデータベース作成処理、認識処理についての具体例を本節に示す。なお、説明を理解しやすくするため、本節では非常に小さな物体IDのbit数、特徴ベクトル数を例示しているが、実際に本願発明が適用される場面では、後述する実験例、あるいはそれよりさらに大規模なデータベースが処理の対象となる。
いま、物体IDが「3」の物体から得られる特徴ベクトルをデータベースに登録する処理について具体的に述べる。まず特徴ベクトルを登録するブルーム・フィルタを決める。ここで、物体ID3を2bitで表現するとしたとき、物体ID3に10というbit列を割り当てたとする。例では、bit列の1番目の数字が1,2番目の数字が0であるので、bit列の1番目の数字に1を連想させるブルーム・フィルタ Y1と、bit列の2番目の数字に0を連想させるブルーム・フィルタ X2に特徴ベクトルを登録する。
また、物体IDをbit列で表現したとき、1が奇数個現れるので、誤り検出ブルーム・フィルタ P1にも特徴ベクトルを登録する。次に、物体ID3の物体より得られる特徴ベクトルを、図2に示すような手順で登録する。
P1 = ( 24,-500, 249, 32),
P2 = (239, 123, -11, -57),
…
があるとき、d=3とすると、P1,P2,・・・はそれぞれ低次元側(左側)から3ビットの各要素を0または1に符号化してなるビットベクトル、
u1 = (1, 0, 1),
u2 = ( 1, 1, 0),
…
に変換される。
ここで、kをk=3とし、ブルーム・フィルタのTableSizeをm=8としたとき、ビットベクトルu1,u2を登録する例を図23に示す。
さらに、他の物体IDについても同様の処理行う。例えば、物体ID4について、11というbit列を割り当てたとする。bit列の1番目および2番目の数字がいずれも1であるので、bit列の1番目の数字に1を連想させるブルーム・フィルタ Y1と、bit列の2番目の数字に1を連想させるブルーム・フィルタ Y2と、偶数ビットの誤り検出ブルーム・フィルタ P0とに、物体ID4の物体から得られる全ての特徴ベクトルを登録する。
以上のようにして、各物体の各特徴ベクトルについて登録を行い、データベースを作成する。
続いて、認識処理の具体例について述べる。まず、検索質問画像から得られる特徴ベクトルを用いて、全てのブルーム・フィルタに対して検索を行う。
いま、検索質問画像から得られる特徴ベクトル(検索質問特徴ベクトル)として、
q1 = ( 31,-480, 220, 49),
q2 = (239, 20, 113, -82),
…
があるとき、データ登録処理時と同様に、特徴ベクトルからビットベクトル、
u1' = ( 1, 0, 1),
u2' = ( 1, 1, 1),
…
を作成する。
検索質問の特徴ベクトルq1から得られたビットベクトルu1'についてハッシュ値を求めると、u1'は登録時のu1と同じ値であるから、登録処理と同様のハッシュ値1,2,4が得られる。ブルーム・フィルタ Y1の1,2,4番目のbitをみると全てが1になっている。この場合、q1はブルーム・フィルタ Y1に登録されていると判断する。
なお、投票に際しては、票に重みを付けてもよい。例えば、物体IDがiの物体から抽出されデータベースに登録された特徴ベクトル数がNi個のとき、その物体IDへの投票に1/√Niの重みを付けて投票するようにしてもよい。
本節では、この発明の有効性を確かめるために、55個の3次元物体を用いたデータセットと、5000個の2次元物体を用いたデータセットに対して行った実験の結果について述べる。
5-1. 実験条件
まず、55個の3次元物体のデータセットについて説明する。図3に本実験で用いた3次元物体の例を示す。本実験では、物体に対して、真正面、真正面から上へ15°、30°の角度から、ウェブカメラで、5°ごとに物体を回転させて撮影した画像を用いた。ウェブカメラは、株式会社ロジクール製、製品型名 Qcam(登録商標) Pro 9000、解像度:640480のものである。このうち、データベース作成用画像として、回転角度が0°, 10°, …, 350°の画像36枚×3方向の、1物体当たり108枚を用い、残りの画像を検索質問画像とした。データベース作成用画像から得られる特徴ベクトルの数は、約120万個である。
5-2. 実験1:55個の3次元物体を用いた実験
上記の結果より、この発明の手法は野口らの手法と比べ、認識にかかる処理時間は多くかかるものの、認識率とメモリ量の点で優れているといえる。
5-3. 実験2:5000個の2次元物体を用いた実験
5-4. 誤り検出の効果
まず、55物体を対象とした実験について述べる。用いたパラメータを表1に、bに関する実験結果を図19に、tに関する実験結果を図20にそれぞれ示す。
Claims (9)
- 物体認識用画像データベースに登録されるべき物体が撮影された画像から、その画像の局所的特徴を表す複数の特徴ベクトルを抽出する特徴抽出工程と、
データを登録できかつあるデータが登録済か否かを判定し得るデータ構造に対し、ある物体から抽出された各特徴ベクトルを、その物体に予め割り当てられた識別子が前記特徴ベクトルから連想されるように登録する登録工程とを備え、
各工程をコンピュータが実行し、
前記登録に係る物体は、nビット(nは自然数)の識別子が割り当てられ、
前記登録工程は、前記識別子の各ビットのゼロ値登録用と1値登録用として用意された2×n個の前記データ構造に対し、各特徴ベクトルが抽出された物体の識別子に応じて各ビットのゼロ値登録用と1値登録用の何れか一方のデータ構造に前記特徴ベクトルをそれぞれ登録し、
前記画像データベースは、検索質問としてある物体の画像が与えられたとき同じ物体が登録されているか否かの認識処理を行うべく、前記コンピュータまたは他のコンピュータによってアクセスされ、
前記認識処理は、前記検索質問から複数の特徴ベクトルを検索質問ベクトルとして抽出し、各検索質問ベクトルと同値の特徴ベクトルが各データ構造に登録されているか否かを調べ、すべてのビットについてゼロ値または1値のいずれかに同値の特徴ベクトルが登録されているときは登録された各ビットの値に応じたnビット値を識別子の候補として得、各検索質問ベクトルにつき得られた候補を統計処理して検索質問に適合する識別子を見出すことを特徴とする物体認識用画像データベースの作成方法。 - 各データ構造は、偽陽性を許容することによりデータを格納するメモリの容量を削減するものである請求項1に記載の作成方法。
- 前記登録工程は、所定の規則を適用して前記識別子に係る誤り検出用の値を得、得られた値を前記誤り検出用のデータ構造に登録し、
前記認識処理は、得られた識別子の候補と前記誤り検出用データ構造に登録された値とを照合し、両者が一致する場合は前記検索質問ベクトルについての判定結果を統計処理の対象とし、一致しない場合は統計処理の対象としない請求項1または2に記載の作成方法。 - 前記誤り検出用の値が少なくとも1ビットからなり、
前記誤り検出用データ構造は、ビットのゼロ値登録用と1値登録用としてデータ構造が用意されてなる請求項3に記載の作成方法。 - 前記認識処理は、偽陽性のために、ゼロ値および1値登録用のいずれのデータ構造にも同一の検索質問ベクトルが登録されていると判断されるビットの数が予め定められた数を超える場合、その検索質問ベクトルについての判定結果を統計処理の対象から除外する請求項2~4のいずれか一つに記載の作成方法。
- 前記認識処理は、前記検索質問ベクトルに関連があると判定される識別子の値に対して所定の得点を与え、前記検索質問ベクトルに関連があると判定される識別子が存しない場合はいずれの識別子にも得点を与えず、
前記検索質問から抽出される検索質問ベクトルについての統計処理に基づき最多得点を得た識別子を決定する請求項1~5のいずれか一つに記載の作成方法。 - 前記データ構造はブルーム・フィルタである請求項1~6のいずれか一つに記載の作成方法。
- 物体認識用画像データベースに登録されるべき物体が撮影された画像から、その画像の局所的特徴を表す複数の特徴ベクトルを抽出する特徴抽出部と、
データを登録できかつあるデータが登録済か否かを判定し得るデータ構造体の集合からなるデータ構造部と、
ある物体から抽出された各特徴ベクトルからその物体に予め割り当てられた識別子が前記特徴ベクトルから連想されるように前記特徴ベクトルを前記データ構造部に登録する登録部とを備え、
前記登録に係る物体は、nビット(nは自然数)の識別子が割り当てられ、
前記データ構造部は、前記識別子の各ビットのゼロ値登録用および1値登録用として2×n個のデータ構造体を少なくとも有し、
前記登録部は、各特徴ベクトルが抽出された物体の識別子に応じて各ビットのゼロ値登録用と1値登録用の何れか一方のデータ構造に前記特徴ベクトルをそれぞれ登録し、
前記画像データベースは、検索質問としてある物体の画像が与えられたとき同じ物体が登録されているか否かの認識処理を行う認識装置によってアクセスされ、
前記認識装置は、前記検索質問から複数の特徴ベクトルを検索質問ベクトルとして抽出し、各検索質問ベクトルと同値の特徴ベクトルが各データ構造に登録されているか否かを調べ、すべてのビットについてゼロ値または1値のいずれかに同値の特徴ベクトルが登録されているときは登録された各ビットの値に応じたnビット値を識別子の候補として得、各検索質問ベクトルにつき得られた候補を統計処理して検索質問に適合する識別子を見出すことを特徴とする物体認識用画像データベースの作成装置。 - 物体認識用画像データベースに登録されるべき物体が撮影された画像から、その画像の局所的特徴を表す複数の特徴ベクトルを抽出する特徴抽出処理と、
データを登録できかつあるデータが登録済か否かを判定し得るデータ構造に対し、ある物体から抽出された各特徴ベクトルを、その物体に予め割り当てられた識別子が前記特徴ベクトルから連想されるように登録する登録処理とをコンピュータに実行させ、
前記登録に係る物体は、nビット(nは自然数)の識別子が割り当てられ、
前記登録処理は、前記識別子の各ビットのゼロ値登録用と1値登録用として用意された2×n個の前記データ構造に対し、各特徴ベクトルが抽出された物体の識別子に応じて各ビットのゼロ値登録用と1値登録用の何れか一方のデータ構造に前記特徴ベクトルをそれぞれ登録し、
前記画像データベースは、検索質問としてある物体の画像が与えられたとき同じ物体が登録されているか否かの認識処理を行うべく、前記コンピュータまたは他のコンピュータによってアクセスされ、
前記認識処理は、前記検索質問から複数の特徴ベクトルを検索質問ベクトルとして抽出し、各検索質問ベクトルと同値の特徴ベクトルが各データ構造に登録されているか否かを調べ、すべてのビットについてゼロ値または1値のいずれかに同値の特徴ベクトルが登録されているときは登録された各ビットの値に応じたnビット値を識別子の候補として得、各検索質問ベクトルにつき得られた候補を統計処理して検索質問に適合する識別子を見出すことを特徴とする物体認識用画像データベースの作成処理プログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP10786104.9A EP2442273A4 (en) | 2009-06-10 | 2010-06-02 | OBJECT IDENTIFICATION IMAGE DATABASE GENERATION PROCESS, GENERATION DEVICE AND PRODUCTION PROCESSING PROGRAM |
| JP2011518472A JP5354507B2 (ja) | 2009-06-10 | 2010-06-02 | 物体認識用画像データベースの作成方法、作成装置および作成処理プログラム |
| CN201080035625.1A CN102460511B (zh) | 2009-06-10 | 2010-06-02 | 用于物体识别的图像数据库的制作方法以及制作装置 |
| US13/376,890 US20120084305A1 (en) | 2009-06-10 | 2010-06-02 | Compiling method, compiling apparatus, and compiling program of image database used for object recognition |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009139148 | 2009-06-10 | ||
| JP2009-139148 | 2009-06-10 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010143573A1 true WO2010143573A1 (ja) | 2010-12-16 |
Family
ID=43308828
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2010/059352 Ceased WO2010143573A1 (ja) | 2009-06-10 | 2010-06-02 | 物体認識用画像データベースの作成方法、作成装置および作成処理プログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20120084305A1 (ja) |
| EP (1) | EP2442273A4 (ja) |
| JP (1) | JP5354507B2 (ja) |
| CN (1) | CN102460511B (ja) |
| WO (1) | WO2010143573A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013246810A (ja) * | 2012-05-30 | 2013-12-09 | Denso It Laboratory Inc | 情報検索装置、情報検索方法及びプログラム |
| KR101546653B1 (ko) | 2012-06-26 | 2015-08-25 | 한국과학기술원 | 증강현실 기반의 실시간 관심 컨텍스트 등록 시스템 및 그 방법 |
| WO2017009958A1 (ja) * | 2015-07-14 | 2017-01-19 | 富士通株式会社 | 圧縮プログラム、圧縮方法および圧縮装置 |
| JP2017517799A (ja) * | 2014-05-14 | 2017-06-29 | インテル・コーポレーション | ソートミドルアーキテクチャにおけるフレームのフレームコヒーレンシへの活用 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9087267B2 (en) | 2011-06-10 | 2015-07-21 | Image Vision Labs, Inc. | Image scene recognition |
| US9223804B2 (en) | 2012-08-27 | 2015-12-29 | Qualcomm Incorporated | Determining capacity of search structures |
| US8972337B1 (en) | 2013-02-21 | 2015-03-03 | Amazon Technologies, Inc. | Efficient query processing in columnar databases using bloom filters |
| US20160117631A1 (en) * | 2014-10-22 | 2016-04-28 | Honeywell International Inc. | Orphaned item identification |
| US9704245B2 (en) | 2015-08-18 | 2017-07-11 | International Business Machines Corporation | Determining localization from images of a vicinity |
| CN109740037B (zh) * | 2019-01-02 | 2023-11-24 | 山东省科学院情报研究所 | 多源、异构流态大数据分布式在线实时处理方法及系统 |
| US11797206B2 (en) * | 2020-12-17 | 2023-10-24 | EMC IP Holding Company LLC | Hash migration using a gold image library management system |
| US11892980B2 (en) * | 2021-09-16 | 2024-02-06 | EMC IP Holding Company LLC | Memory optimized algorithm for evaluating deduplication hashes for large data sets |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008026414A1 (fr) | 2006-08-31 | 2008-03-06 | Osaka Prefecture University Public Corporation | Procédé de reconnaissance d'image, dispositif de reconnaissance d'image et programme de reconnaissance d'image |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7043474B2 (en) * | 2002-04-15 | 2006-05-09 | International Business Machines Corporation | System and method for measuring image similarity based on semantic meaning |
| JP4479478B2 (ja) * | 2004-11-22 | 2010-06-09 | 株式会社日立製作所 | パターン認識方法および装置 |
| KR100903961B1 (ko) * | 2007-12-17 | 2009-06-25 | 한국전자통신연구원 | 시그니처 파일을 이용한 고차원 데이터 색인 및 검색방법과 그 시스템 |
| CN100592297C (zh) * | 2008-02-22 | 2010-02-24 | 南京大学 | 一种基于表示转换的多义数字图像检索方法 |
| US7970808B2 (en) * | 2008-05-05 | 2011-06-28 | Microsoft Corporation | Leveraging cross-document context to label entity |
-
2010
- 2010-06-02 US US13/376,890 patent/US20120084305A1/en not_active Abandoned
- 2010-06-02 EP EP10786104.9A patent/EP2442273A4/en not_active Withdrawn
- 2010-06-02 WO PCT/JP2010/059352 patent/WO2010143573A1/ja not_active Ceased
- 2010-06-02 JP JP2011518472A patent/JP5354507B2/ja not_active Expired - Fee Related
- 2010-06-02 CN CN201080035625.1A patent/CN102460511B/zh not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008026414A1 (fr) | 2006-08-31 | 2008-03-06 | Osaka Prefecture University Public Corporation | Procédé de reconnaissance d'image, dispositif de reconnaissance d'image et programme de reconnaissance d'image |
Non-Patent Citations (14)
| Title |
|---|
| "PCA-SIFT: A more distinctive representation for local image descriptors", PROC. OF CVPR2004, vol. 2, 2004, pages 506 - 513 |
| B. CHAZELLE; J. KILIAN; R. RUBINFELD; A. TAL: "The Bloomier Filter: An Efficient Data Structure for Static Support Lookup Table", PROC. 15TH ANNUAL ACM-SIAM SODA, 2004, pages 30 - 39, XP008148797 |
| B. H. BLOOM: "Space/Time Trade-offs in Hash Coding with Allowable Errors", COMMUN. ACM, vol. 13, no. 7, 1970, pages 422 - 426, XP002490170, DOI: doi:10.1145/362686.362692 |
| BERNARD ET AL.: "The Bloomier filter: an efficient data structure for static support lookup tables", PROCEEDINGS OF THE FIFTEENTH ANNUAL ACM-SIAM SYMPOSIUM ON DISCRETE ALGORITHMS, 2004, pages 30 - 39, XP008148797 * |
| D. LOWE: "Distinctive Image Features from Scale-Invariant Keypoints", INTERNATIONAL JOURNAL OF COMPUTER VISION, vol. 60, no. 2, 2004, pages 91 - 110, XP019216426, DOI: doi:10.1023/B:VISI.0000029664.99615.94 |
| F. FRAUNDORFER; H. STEWENIUS; D. NISTER: "A Binning Scheme for Fast Hard Drive Based Image Search", PROC. OF CVPR2007, 2007, pages 1 - 6, XP031114431 |
| HIROYA MINAMI: "WWW ni Okeru Bunsan Caching Gijutsu", NTT GIJUTSU JOURNAL, vol. 12, no. 5, 1 May 2000 (2000-05-01), pages 59 - 62, XP008148816 * |
| K. KISE; K. NOGUCHI; M. IWAMURA: "Memory Efficient Recognition of Specific Objects with Local Features", PROC. OF THE 19TH INTERNATIONAL CONFERENCE OF PATTERN RECOGNITION (ICPR2008) WEAT3.1, 2008 |
| KATSUFUMI INOUE; HIROSHI MIYAKE; KOICHI KISE: "A Memory Reduction Method for 3D Object Recognition based on Local Descriptors - An Approach by Selecting Local Descriptors", MEETING ON IMAGE RECOGNITION AND UNDERSTANDING (MIRU2008), OS15-3, 2008, pages 363 - 370 |
| KAZUTO NOGUCHI ET AL.: "Efficient Recognition of Specific Objects by Cascading Approximate Nearest Neighbor Searchers", MEETING ON IMAGE RECOGNITION AND UNDERSTANDING (MIRU2007) RONBUNSHU, 30 July 2007 (2007-07-30), pages 111 - 118, XP008148817 * |
| KAZUTO NOGUCHI; KOICHI KISE; MASAKAZU IWAMURA: "Efficient Recognition of Objects by Cascading Approximate Nearest Neighbor Searches", MEETING ON IMAGE RECOGNITION AND UNDERSTANDING (MIRU2007), OS-B2-02, 2007, pages 111 - 118, XP008148817 |
| NORITAKA HIMEI; TOSHIKAZU WADA: "Approximate nearest neighbor search algorithm on HDD based on B+ tree", IEICE, vol. 108, no. 484, 2009, pages 223 - 228 |
| See also references of EP2442273A4 |
| TAKAYUKI HONDO; KOICHI KISE: "Inspection of Memory Reduction Methods for Specific Object Recognition - Approaches by Quantization and Selection of Local Features", TECHNICAL REPORT OF THE INSTITUTE OF ELECTRONICS, INFORMATION, AND COMMUNICATION ENGINEERS, vol. 108, no. 484, 2009, pages 171 - 176 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013246810A (ja) * | 2012-05-30 | 2013-12-09 | Denso It Laboratory Inc | 情報検索装置、情報検索方法及びプログラム |
| KR101546653B1 (ko) | 2012-06-26 | 2015-08-25 | 한국과학기술원 | 증강현실 기반의 실시간 관심 컨텍스트 등록 시스템 및 그 방법 |
| JP2017517799A (ja) * | 2014-05-14 | 2017-06-29 | インテル・コーポレーション | ソートミドルアーキテクチャにおけるフレームのフレームコヒーレンシへの活用 |
| WO2017009958A1 (ja) * | 2015-07-14 | 2017-01-19 | 富士通株式会社 | 圧縮プログラム、圧縮方法および圧縮装置 |
| JPWO2017009958A1 (ja) * | 2015-07-14 | 2018-04-26 | 富士通株式会社 | 圧縮プログラム、圧縮方法および圧縮装置 |
| US10747725B2 (en) | 2015-07-14 | 2020-08-18 | Fujitsu Limited | Compressing method, compressing apparatus, and computer-readable recording medium |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102460511A (zh) | 2012-05-16 |
| US20120084305A1 (en) | 2012-04-05 |
| JPWO2010143573A1 (ja) | 2012-11-22 |
| EP2442273A4 (en) | 2014-04-23 |
| JP5354507B2 (ja) | 2013-11-27 |
| EP2442273A1 (en) | 2012-04-18 |
| CN102460511B (zh) | 2014-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5354507B2 (ja) | 物体認識用画像データベースの作成方法、作成装置および作成処理プログラム | |
| Wang et al. | Contextual weighting for vocabulary tree based image retrieval | |
| Zheng et al. | SIFT meets CNN: A decade survey of instance retrieval | |
| JP5294342B2 (ja) | 物体認識用画像データベースの作成方法、処理装置および処理用プログラム | |
| JP4883649B2 (ja) | 画像認識方法、画像認識装置および画像認識プログラム | |
| US8254697B2 (en) | Scalable near duplicate image search with geometric constraints | |
| Jégou et al. | On the burstiness of visual elements | |
| Zheng et al. | Packing and padding: Coupled multi-index for accurate image retrieval | |
| US8892542B2 (en) | Contextual weighting and efficient re-ranking for vocabulary tree based image retrieval | |
| US9053386B2 (en) | Method and apparatus of identifying similar images | |
| Zheng et al. | Visual phraselet: Refining spatial constraints for large scale image search | |
| CN103324650A (zh) | 一种图像检索方法及系统 | |
| JP5598925B2 (ja) | 高次元の特徴ベクトルを高精度で検索する検索装置及びプログラム | |
| JP6017277B2 (ja) | 特徴ベクトルの集合で表されるコンテンツ間の類似度を算出するプログラム、装置及び方法 | |
| Amato et al. | Large scale image retrieval using vector of locally aggregated descriptors | |
| Zhou et al. | Visual word expansion and BSIFT verification for large-scale image search | |
| JP5833499B2 (ja) | 高次元の特徴ベクトル集合で表現されるコンテンツを高精度で検索する検索装置及びプログラム | |
| JP6364387B2 (ja) | 特徴量生成装置、方法、及びプログラム | |
| CN116737973A (zh) | 一种基于倒排索引融合的多特征图像检索方法 | |
| Nayef et al. | Efficient symbol retrieval by building a symbol index from a collection of line drawings | |
| CN114595350B (zh) | 一种百亿级图像快速搜索的方法 | |
| Kubytskyi et al. | An Effective Approach to Image Embeddings for E-Commerce. | |
| Feng et al. | Efficient indexing for mobile image retrieval | |
| CN121074913A (zh) | 一种基于深度学习的工业图纸相似度检测方法 | |
| Inoue et al. | Analysis of the effect of dataset differences on object recognition: the case of recognition methods based on exact matching of feature vectors |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201080035625.1 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 10786104 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011518472 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13376890 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2010786104 Country of ref document: EP |