WO2011137501A2 - Sistema de controle para pistão de compressor linear ressonante, método de controle para pistão de compressor linear ressonante e compressor linear ressonante - Google Patents
Sistema de controle para pistão de compressor linear ressonante, método de controle para pistão de compressor linear ressonante e compressor linear ressonante Download PDFInfo
- Publication number
- WO2011137501A2 WO2011137501A2 PCT/BR2011/000131 BR2011000131W WO2011137501A2 WO 2011137501 A2 WO2011137501 A2 WO 2011137501A2 BR 2011000131 W BR2011000131 W BR 2011000131W WO 2011137501 A2 WO2011137501 A2 WO 2011137501A2
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- linear compressor
- calculated
- resonant linear
- resonant
- piston
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
- F04B49/065—Control using electricity and making use of computers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B35/00—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for
- F04B35/04—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for the means being electric
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B35/00—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for
- F04B35/04—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for the means being electric
- F04B35/045—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for the means being electric using solenoids
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/10—Other safety measures
- F04B49/103—Responsive to speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B51/00—Testing machines, pumps, or pumping installations
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B53/00—Component parts, details or accessories not provided for in, or of interest apart from, groups F04B1/00 - F04B23/00 or F04B39/00 - F04B47/00
- F04B53/001—Noise damping
- F04B53/003—Noise damping by damping supports
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B53/00—Component parts, details or accessories not provided for in, or of interest apart from, groups F04B1/00 - F04B23/00 or F04B39/00 - F04B47/00
- F04B53/14—Pistons, piston-rods or piston-rod connections
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K33/00—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system
- H02K33/16—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system with polarised armatures moving in alternate directions by reversal or energisation of a single coil system
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/14—Structural association with mechanical loads, e.g. with hand-held machine tools or fans
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/032—Reciprocating, oscillating or vibrating motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2201/00—Pump parameters
- F04B2201/02—Piston parameters
- F04B2201/0202—Linear speed of the piston
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2201/00—Pump parameters
- F04B2201/02—Piston parameters
- F04B2201/0206—Length of piston stroke
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2203/00—Motor parameters
- F04B2203/04—Motor parameters of linear electric motors
- F04B2203/0409—Linear speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2210/00—Working fluid
- F05B2210/10—Kind or type
- F05B2210/12—Kind or type gaseous, i.e. compressible
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S415/00—Rotary kinetic fluid motors or pumps
Definitions
- the present invention relates to a resonant linear compressor piston control system specially designed to operate at its maximum efficiency, such system being capable of driving said compressor without the use of sensors to measure quantities or mechanical variables.
- the present invention further relates to a piston control method of a resonant linear compressor, the steps of which allow estimating the speed and displacement of said piston in order to efficiently control the compressor motor.
- the present invention relates to a resonant linear compressor provided with a control system as proposed in the object claimed herein.
- Reciprocating piston compressors generate pressure by compressing the gas inside a cylinder by axial movement of the piston, so that the low pressure side gas, also known as suction or evaporation pressure, enters the interior of the cylinder. cylinder through the suction valve. The gas is then compressed into the cylinder by the movement of the piston, and then compressed, exits the cylinder through the discharge valve to the high pressure side, also called discharge pressure or condensation.
- the low pressure side gas also known as suction or evaporation pressure
- the piston is driven by a linear actuator which is formed by a holder and magnets that can be driven by one or more coils.
- the linear compressor further comprises one or more springs which connect the movable part (piston, support and magnets) to the fixed part, which is formed by the cylinder, stator, coil, head and frame.
- the moving parts and springs form the resonant compressor assembly.
- Such a resonant assembly, driven by the linear motor has the function of developing a linear reciprocating motion, causing the movement of the piston within the cylinder to exert a compressive action of the gas admitted by the suction valve to the point where it can be discharged via the discharge valve to the high pressure side.
- the operating range of the linear compressor is regulated by the balance of the power generated by the motor, the power consumed by the compression mechanism, and the losses generated in this process.
- the maximum displacement of the piston In order to achieve maximum thermodynamic efficiency and maximum cooling capacity, the maximum displacement of the piston must be as close as possible to the limit switch, thereby reducing the dead volume of gas in the compression process.
- PI 0203724-6 relates to a fluid pump and a fluid transfer plate, such elements being particularly applicable to linear compressors for detecting the position of the respective and preventing the latter from colliding with the fluid transfer plate.
- fluid, or valve plate on occasion of variations in compressor operating conditions, or even variations in supply voltage.
- Such a technique employs an inductive sensor mounted on the valve plate to measure the piston / plate distance directly at the top of the piston. It is a high precision solution, but needs space for the sensor to be installed on the valve plate and has a higher cost, besides the fact that it needs calibration.
- the present invention provides a system and control method for resonant linear compressor piston, specially designed to drive the compressor at maximum efficiency, without using sensors to measure quantities or mechanical variables.
- a first object of the present invention is to propose a control system for resonant linear compressor piston, which is capable of driving the compressor at its resonant frequency, in order to obtain maximum equipment efficiency in refrigeration systems.
- a second object of the present invention is to propose a method capable of estimating the displacement and piston speed of a resonant linear compressor from a mass / spring model and an electric model of the compressor motor, using only and only of measured electrical quantities of said motor.
- a third object of the present invention is to reduce the cost of the compressor by eliminating sensors normally intended to measure mechanical quantities or variables, such as position, speed, temperature and pressure sensors, and thereby reducing the number of wires and connections required. for the operation of the resonant linear compressor.
- a further object of the present invention is to drive the resonant linear compressor with reduced safety coefficient between maximum piston travel and end of stroke to optimize equipment operation and to achieve maximum compressor performance without compromising reliability and product safety.
- One way of achieving the objectives of the present invention is by providing a resonant linear compressor piston control system, the resonant linear compressor being an integral part of a refrigeration circuit, the resonant linear compressor comprising at least one cylinder, at least one cylinder.
- the control system comprising at least one electronic control unit, the electronic control unit comprising at least one observing electronic circuit and at least one electrically associated control circuit, the electronic control unit being electrically associated with the resonant linear compressor electric motor, the observer electronic circuit being configured to measure at least one electrical quantity of the resonant linear compressor electric motor, the observer electronic circuit being conf configured to estimate at least one resonant linear compressor motor electrical parameter set and at least one resonant linear compressor motor parameter set, the observer electronic circuit being configured to estimate and provide at least one system control parameter to the circuit from the measured electrical quantity and set of estimated electrical and mechanical parameters, the control circuit being configured to drive the resonant linear compressor electric motor from the estimated control parameters, the estimated control parameters comprising at least one offset compressor piston, the control circuit driving the resonant linear compressor motor from the estimated control parameters.
- a second way of achieving the objectives of the present invention is by providing a control method for resonant linear compressor piston, the resonant linear compressor comprising at least one electric motor, the electric motor being driven by a frequency inverter, the method comprising the following steps: (a) measure at each operating cycle of the resonant linear compressor, with a discretization frequency, a measured current of the electric motor;
- c) calculate at each operating cycle of the resonant linear compressor, at the discretization frequency, a calculated motor current, a piston displacement and a piston speed;
- step e calculate, in one operating cycle, based on the piston displacement calculated in step c, a maximum displacement of the resonant linear compressor piston;
- g calculate, in one operating cycle, a power dissipated in a motor electrical resistance from the measured current
- step j calculate an equivalent continuous force as a function of the actual input power to the electric motor calculated in step f and as a function of the duty cycle calculated in step b
- k calculate, from the maximum displacement and speed of the piston and in the measured current, an operating voltage value to be applied in the electric motor of the linear compressor;
- the above method further comprises a step aimed at calculating a resonant linear compressor total spring coefficient from the resonant frequency calculated in step b and a resonant linear compressor total damping coefficient calculated from the balance of power.
- the objectives of the present invention are achieved by providing a control method for resonant linear compressor piston, the resonant linear compressor comprising at least one electric motor, the electric motor being electrically driven by a frequency inverter. , the control method comprising the following steps:
- step iv) adjust, from the maximum displacement and piston speed obtained in step iii, a new value for the operating voltage to be applied to the linear motor electric motor inverter;
- Figure 1 is a schematic view of a resonant linear compressor
- Figure 2 illustrates a schematic view of the mechanical model of the resonant linear compressor employed in the present invention
- Figure 3 illustrates a schematic view of the electrical model of the resonant linear compressor object of the present invention
- Figure 4 illustrates a block diagram of the resonant linear compressor model
- Fig. 5 shows a block diagram of the state observer model for the resonant linear compressor, object of the present invention
- FIG. 6 shows a simplified block diagram of the control according to the teachings of the present invention.
- Figure 7 shows a block diagram of the control and inverter, object of the present invention.
- Figure 8 illustrates a block diagram of the piston control system employing current and velocity values according to a preferred embodiment of the present invention
- Figure 9 illustrates a block diagram of the piston control system employing voltage and frequency values in a second embodiment of the object of the present invention.
- Figure 10 is a flow chart of the control method, according to the steps and steps provided in the object of the present invention.
- Figure 1 shows a graph highlighting, among other quantities, the current profile measured in the linear compressor motor, object of the present invention
- Figure 12 shows a graph of the gas pressure force
- Figure 13 shows a graph of the equivalent spring forces of equivalent and continuous offset damping (Offset); and Figure 14 shows a graph of the resulting force (sum of the 3 equivalent forces) according to the object of the present invention.
- Figure 1 shows a schematic view of a resonant linear compressor 100 applied in the present invention.
- the piston is driven by a linear actuator which is formed by a bracket 4 and magnets 5 driven by one or more coils 6.
- a linear actuator which is formed by a bracket 4 and magnets 5 driven by one or more coils 6.
- one or more springs 7a and 7b connect the moving part ( piston 1, support 4 and magnets 5) the fixed part formed by cylinder 2, stator 12, coils 6, head 3 and frame 13.
- the moving parts and springs form the resonant assembly of the present compressor 100.
- the resonant assembly driven by the linear motor has the function of developing a linear reciprocating motion, causing the movement of the piston within the cylinder to exert a compressive force of the gas admitted by the suction valve 3a to the point where It can be discharged through the discharge valve 3b, to the high pressure side.
- the operating range of the linear compressor 100 is governed by the balance of the power generated by the motor and the power consumed by the compression mechanism, as well as the losses generated in this process.
- the piston displacement must be as close to its end of stroke as possible, thus reducing the dead volume of gas in the compression process.
- the piston stroke must be known with great precision in order to avoid the risk of a piston impact with the stroke end (head), since this impact can lead to acoustic noise and loss. efficiency, until the compressor breaks.
- the greater the error in estimating / measuring the piston position the greater the safety coefficient required between maximum travel and end of stroke to operate the compressor safely, leading to loss of performance in the final equipment.
- the present invention provides a system and control method for linear compressor piston capable of accurately estimating the speed and displacement of said piston from a series of operating parameters of said compressor more precisely. simplified and efficient.
- a compressor is an integral part of a refrigeration circuit, and as already mentioned, it comprises at least one cylinder 2, at least one head 3, at least one electric motor, and at least one spring 7a / 7b, so that the cylinder 2 operatively accommodates the piston.
- the control system proposed herein comprises at least one electronic control unit 15, said unit comprising at least one observing electronic circuit 20 and at least one electrically associated control circuit 30.
- the electronic control unit 15 is electrically associated with the resonant linear compressor electric motor 100.
- Figure 6 shows a simplified block diagram for the control system object of the present invention.
- said observer electronic circuit 20 is configured to measure at least one electrical quantity of the resonant linear compressor electric motor 100, such observer circuit 20 being configured to estimate at least one set of linear compressor motor electrical parameters. 100 and at least one set of mechanical parameters of the resonant linear compressor 100.
- the observer electronic circuit 20 is preferably configured and implemented from a microprocessor electronic circuit, or other equivalent.
- Figures 6 to 10 illustrate block diagrams in which electrical and mechanical parameters are estimated.
- the observer electronic circuit 20 is configured to estimate and provide at least one control parameter P c from the system to the control circuit 30 from the measured electrical quantity and set of electrical parameters. estimated mechanical and mechanical costs.
- Control circuit 30 is configured to drive the resonant linear compressor electric motor 100 from the estimated control parameters P c .
- estimated control parameters P c comprise at least one maximum displacement DMAX of piston 1 of compressor 100.
- control parameters P c further comprise a piston speed v and (t) of compressor 100, so that control circuit 30 drives resonant linear compressor motor 100 from piston speed values v and (t) and estimated maximum displacement DMAX.
- the measured electrical quantity is composed of an operating current value i m , or simply measured current i m , of the resonant linear compressor motor 100.
- a very innovative feature of the present control system refers to the proposed mathematical modeling, formed from an electric and mechanical model of the linear compressor 100.
- Figure 2 illustrates a mechanical model of the linear compressor 100
- Figure 3 shows an electrical model for the same equipment.
- the set of electrical parameters is calculated from an electrical mathematical model of the resonant linear compressor 100, and this model is defined based on a series RL electric circuit with a voltage source, equated through from the equation below:
- the mechanical parameter set is calculated from a mechanical mathematical model of the resonant linear compressor 100, so that this model is defined based on a mass / spring mechanical system. equated through the equation:
- the set of electrical parameters and the set of mechanical parameters when combined, define a set of electromechanical parameters, which are equated in matrix form (3).
- the set of electrical parameters and the set of mechanical parameters when combined, define a set of electromechanical parameters, which are equated in matrix form (3).
- the only output of the system is the electric current of the compressor motor 100, since the modeling developed takes into account only the measurement of electrical quantities.
- gas pressure force F G d (t) is variable with the suction and discharge pressures, as well as the displacement of the piston 1, as illustrated in figure 12, between other linear and nonlinear quantities of the system, a fact that justifies its application in the modeling proposed in the present object, otherwise significant errors could produce undesired effects in the control of the linear compressor 100.
- the present invention compensates for the effects caused to the system by the pressure force of the gas, as it has at least three main effects on said equipment, which are: 1. variation in resonant frequency;
- the present solution replaces the gas pressure force F G (d (t)) with 3 other linear forces that compensate for the effects of this pressure force, which are: a spring force e- equivalent damping force and equivalent continuous force as illustrated in Figures 13 and 14.
- Equivalent spring force is adjusted to compensate for the effects of resonant frequency variation, while equivalent damping force is adjusted to compensate for power consumption.
- equivalent continuous force is adjusted to compensate for the displacement of the piston midpoint oscillation.
- the proposed system can be represented by the equations below, so that, in this model, the matrix A is variable, as a function of K ML Eq and KA Eq, and the input g (t) is continuous.
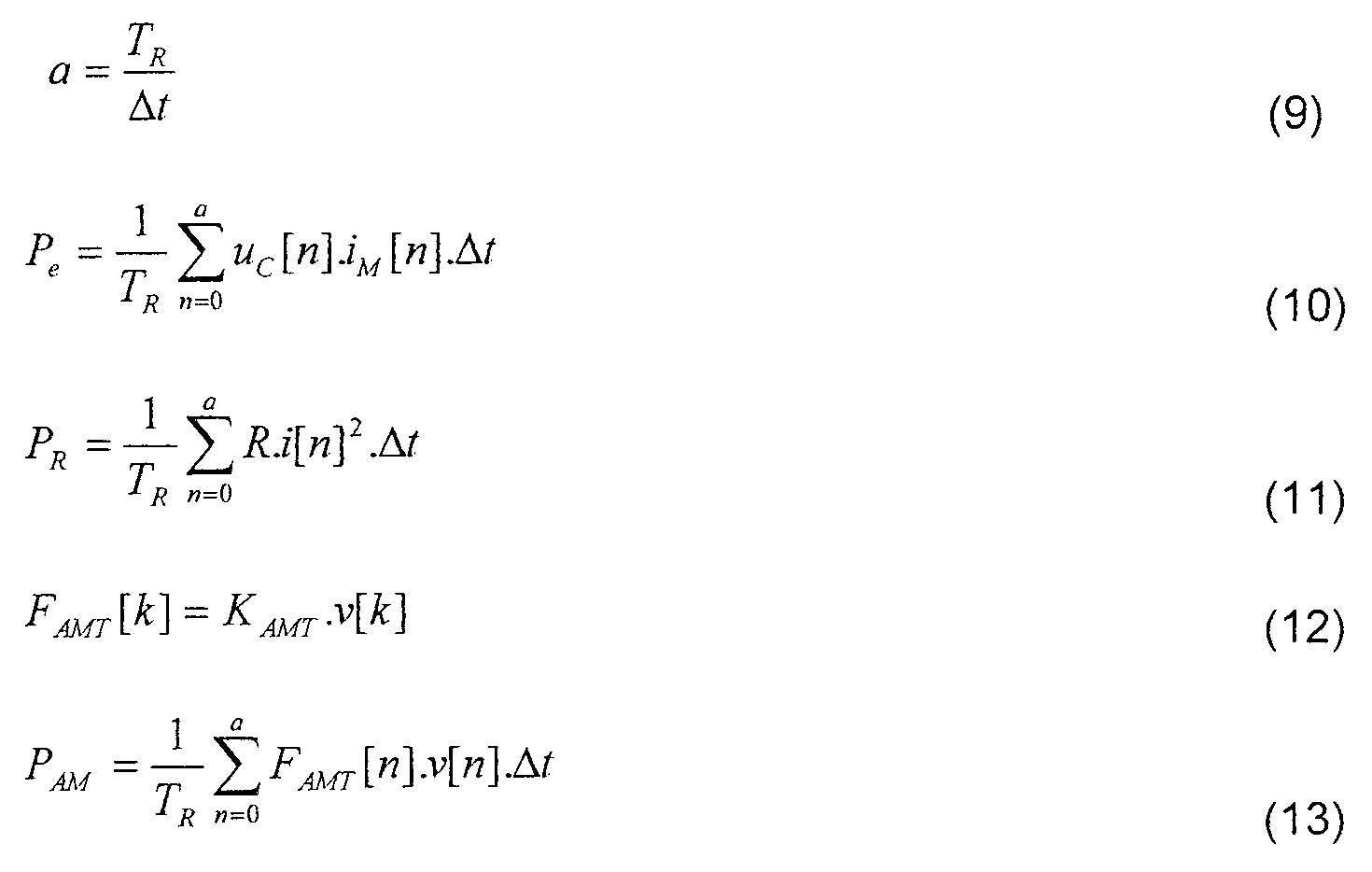
- Such KMLT total spring coefficient is adjusted at each linear motor cycle according to a resonant frequency F R of the system as shown in equation 7 below.
- the resonance frequency is adjusted every cycle period for reading the actual current i m or the measured motor.
- Figure 11 illustrates the measured current profile t m of the characteristic motor in this type of application and the resonant frequency period.
- An important aspect of the present invention relates to the system power balance adjustment. Such adjustment is developed if the power measured at the system input is greater than the power consumed by the total observer damping force 20, plus the loss at the so-called observer resistance 20, so in this case the total damping coefficient K A T must be increased, otherwise we must decrease the total damping coefficient (K A MT).
- FIG. 7 shows in more detail the main functional blocks of the piston control system 1, according to the teachings of the present invention.
- Figure 8 illustrates a block diagram for one embodiment. control system hereby claimed.
- Such a system based on the electro - canonical set of parameters described above, is fed back by a current error of the observer 20 i and vector multiplied by a gain K, and the current i and the error calculated by the difference between the measured current i m and the calculated motor current i and (t),
- the resonant linear compressor electric motor 100 is driven through control unit 15 at a resonant frequency FR calculated at each operating cycle T R of the linear compressor 100.
- Said cycle of operation T R is measured by the measured current i m and calculated to have the same period as the measured current i m .
- Figure 11 illustrates the profile of said measured current i m , and its operating period can be obtained from observing the moments in which the current i m goes through zero.
- the calculated current of motor i and (t), piston displacement d e (t) and piston speed v and (t) of linear compressor 100 are calculated at a discretization frequency.
- F D substantially higher than the resonant frequency F R , such a discretization frequency F D being operable about 10 times or more the resonant frequency F R.
- the maximum displacement D M AX is calculated from the displacement piston d e (t) during a duty cycle T R. Similarly, the set of mechanical parameters is calculated at each operating cycle T R.
- Fig. 8 it can be further seen that the drive of the resonant linear compressor 100 is provided based on an operating voltage u c , this voltage u c being calculated based on the maximum displacement values D AX and displacement speed v e (t) of piston 1 calculated. Such values are compared with reference values by state controllers such as P! (proportional and integral) or PID (proportional, integral and derivative).
- the present invention provides an innovative method for resonant linear compressor piston control 100.
- Such method provides for a compressor having an electric motor, which is driven by a frequency inverter.
- Said method essentially comprises the following steps:
- the present method further comprises a step aimed at calculating the total spring coefficient KMLT of the resonant linear compressor 100 from the resonant frequency FR calculated in step b.
- the proposed method provides a step to calculate the total damping coefficient KAMT of the resonant linear compressor 100, from the actual input powers P E , dissipated PR and dissipated by the total damping PAMT-
- the total spring coefficient KMLT is calculated from the equation:
- a set of matrices A, B and F is calculated in order to project a gain vector K.
- a first matrix coefficient A, a second coefficient matrix B, a third coefficient matrix F, and a gain vector K in a duty cycle T R of the resonant linear compressor 100 are calculated from the total spring coefficient KMLT and the coefficient of total damping KAMT-
- the present system generates a variable coefficient model, also called the adaptive system, which is adjusted with each compressor 100 operation cycle.
- the method claimed in the present invention takes into account a mathematical modeling of the linear compressor 100, as already observed for the proposed control system.
- equation 1 is reproduced below.
- the piston control method takes into account a mechanical mathematical modeling of the linear compressor 100, which is defined based on a mechanical mass / spring system equated by equation 2 below. represented earlier:
- the proposed control method comprises an electromechanical mathematical model of the linear compressor 100 equated in a similar matrix form as proposed for the present control system.
- the electromechanical mathematical model of the linear compressor 100 is fed by an observer current error i and multiplied by a gain vector K, where the observer current error i and calculated by the difference between the measured current i m and the calculated current of motor i and (t), the electromechanical mathematical model of the resonant linear compressor 100 being equated by equation 14 reproduced below, previously defined for the control system:
- Figure 8 shows, as already commented, a preferred embodiment for the proposed system and control method. For such configuration, the following additional steps are provided:
- the first reference electric current M ref is generated on an output of a first integral proportional state controller Pu.
- This controller may further be formed by a derivative integral proportional control.
- the same figure 8 shows that the operating voltage u c applied to the electric motor inverter is generated at an output of a second integral proportional state controller P
- the present control method for linear compressor piston is configured from the following steps:
- step iv) adjust, from the maximum displacement DMAX and piston speed v and (t) obtained in step iii, a new value for the operating voltage u c to be applied to the linear motor electric motor inverter 100; and v) apply to the resonant linear compressor electric motor inverter 100 the operating voltage u c set in step iv.
- the operating voltage value u c is calculated in a duty cycle T R of the resonant linear compressor 100, so that the duty cycle T R defines the operation of the linear compressor 100 at the resonant frequency. F R.
- the method described above also takes into account that the set of electrical parameters is calculated from an electrical mathematical model of the resonant linear compressor 100.
- the set of mechanical parameters is calculated from a mechanical mathematical model of the resonant linear compressor 100, or from an electromechanical mathematical model of the resonant linear compressor 100 defined based on the sets of electrical and mechanical parameters.
- Equations 1 and 2 defined in the present invention are also applied to the broader methodology above, namely, to the compressor 100 electric motor modeled as a series RL electrical circuit, and to the same compressor 100 modeled as a mass / mechanical system. spring.
- the resonant linear compressor piston 1 system and control method 100 achieves its objectives in that a set of estimated parameters allows the operation of compressor 00 at its maximum efficiency, without making use of sensors configured to measure quantities or mechanical variables.
- the preferred embodiment described in figure 8 gives the proposed system simple and efficient control for compressor 100 employing the displacement and velocity of piston 1 estimated by the observer electronic circuit 20, while the alternative embodiment illustrated in figure 9 , allows a control capable of replacing the velocity signal with a sine signal in phase with said velocity.
- Both solutions are able to optimize compressor efficiency without the use of auxiliary measuring devices, while taking into account the estimation of piston 1 maximum displacement DMAX, which contributes significantly to the reduction of installation engineering time, simplifying the production process by reducing components and reducing the number of connections required, and especially when servicing the final equipment.
- Such solutions operate the present system safely, thus allowing piston 1 to work at their maximum stroke without colliding with the compressor head 100.
- the present invention provides a resonant linear compressor 100 comprising a piston control method as defined in the object herein claimed.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Computer Hardware Design (AREA)
- Compressors, Vaccum Pumps And Other Relevant Systems (AREA)
- Control Of Positive-Displacement Pumps (AREA)
Abstract
Description


















Claims


























Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013508333A JP5873075B2 (ja) | 2010-05-05 | 2011-05-05 | 共鳴リニアコンプレッサのピストンの制御システム、共鳴リニアコンプレッサのピストンの制御方法および共鳴リニアコンプレッサ |
| US13/696,253 US9518578B2 (en) | 2010-05-05 | 2011-05-05 | System for controlling a resonant linear compressor piston, method for controlling a resonant linear compressor piston, and resonant linear compressor |
| DK11738584.9T DK2568179T3 (en) | 2010-05-05 | 2011-05-05 | System for controlling a linear resonant compressor piston, method of controlling a linear resonant compressor piston and linear resonant compressor |
| ES11738584.9T ES2557464T3 (es) | 2010-05-05 | 2011-05-05 | Sistema para controlar un pistón de un compresor lineal resonante, un procedimiento para controlar un pistón de un compresor lineal resonante y un compresor lineal resonante |
| KR1020127024162A KR20130090319A (ko) | 2010-05-05 | 2011-05-05 | 공진 선형 압축기 피스톤을 제어하기 위한 시스템, 공진 선형 압축기 피스톤을 제어하기 위한 방법, 및 공진 선형 압축기 |
| EP11738584.9A EP2568179B1 (en) | 2010-05-05 | 2011-05-05 | System for controlling a resonant linear compressor piston, method for controlling a resonant linear compressor piston, and resonant linear compressor |
| CN201180022529.8A CN102884321B (zh) | 2010-05-05 | 2011-05-05 | 共振式线性压缩机及其活塞的控制系统、控制方法 |
| US15/291,613 US9915260B2 (en) | 2010-05-05 | 2016-10-12 | System for controlling a resonant linear compressor piston, method for controlling a resonant linear compressor piston, and resonant linear compressor |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| BRPI1001388-1 | 2010-05-05 | ||
| BRPI1001388-1A BRPI1001388A2 (pt) | 2010-05-05 | 2010-05-05 | sistema de controle para pistço de compressor linear ressonante, mÉtodo de controle para pistço de compressor linear ressonante e compressor linear ressonante |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US13/696,253 A-371-Of-International US9518578B2 (en) | 2010-05-05 | 2011-05-05 | System for controlling a resonant linear compressor piston, method for controlling a resonant linear compressor piston, and resonant linear compressor |
| US15/291,613 Division US9915260B2 (en) | 2010-05-05 | 2016-10-12 | System for controlling a resonant linear compressor piston, method for controlling a resonant linear compressor piston, and resonant linear compressor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| WO2011137501A2 true WO2011137501A2 (pt) | 2011-11-10 |
| WO2011137501A3 WO2011137501A3 (pt) | 2012-07-05 |
Family
ID=44511708
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/BR2011/000131 Ceased WO2011137501A2 (pt) | 2010-05-05 | 2011-05-05 | Sistema de controle para pistão de compressor linear ressonante, método de controle para pistão de compressor linear ressonante e compressor linear ressonante |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US9518578B2 (pt) |
| EP (1) | EP2568179B1 (pt) |
| JP (1) | JP5873075B2 (pt) |
| KR (1) | KR20130090319A (pt) |
| CN (1) | CN102884321B (pt) |
| BR (1) | BRPI1001388A2 (pt) |
| DK (1) | DK2568179T3 (pt) |
| ES (1) | ES2557464T3 (pt) |
| WO (1) | WO2011137501A2 (pt) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013188940A3 (en) * | 2012-06-20 | 2014-04-17 | Whirlpool S.A. | Electric drive method for linear motor |
| US8714946B2 (en) | 2012-09-13 | 2014-05-06 | General Electric Company | Linear compressor with an electro-magnetic spring |
| US9086062B2 (en) | 2012-09-13 | 2015-07-21 | General Electric Company | Linear compressor with an electro-magnetic spring |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102115247B1 (ko) * | 2013-12-19 | 2020-05-26 | 엘지전자 주식회사 | 리니어 압축기 제어 장치 및 제어 방법 |
| CN105099329B (zh) * | 2014-05-19 | 2018-04-06 | 罗克韦尔自动化技术公司 | 准变频电机控制器 |
| AT515819B1 (de) * | 2014-06-10 | 2016-02-15 | Seh Ltd | Verfahren zur Steuerung der Polung eines Magnetantriebes |
| US10208741B2 (en) * | 2015-01-28 | 2019-02-19 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| US20160215770A1 (en) * | 2015-01-28 | 2016-07-28 | General Electric Company | Method for operating a linear compressor |
| US10502201B2 (en) * | 2015-01-28 | 2019-12-10 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| US9912276B2 (en) * | 2015-08-28 | 2018-03-06 | Semiconductor Components Industries, Llc | Method of forming a semiconductor device and structure therefor |
| US10174753B2 (en) | 2015-11-04 | 2019-01-08 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| US9890778B2 (en) * | 2015-11-04 | 2018-02-13 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| JP6764751B2 (ja) * | 2016-10-14 | 2020-10-07 | 日立オートモティブシステムズ株式会社 | リニア圧縮機及びこれを搭載した機器 |
| CN107035584B (zh) * | 2016-11-11 | 2019-06-28 | 安徽江淮汽车集团股份有限公司 | 一种油泵泵芯支架 |
| US10830230B2 (en) | 2017-01-04 | 2020-11-10 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| KR102840111B1 (ko) * | 2017-01-18 | 2025-07-31 | 엘지전자 주식회사 | 리니어 압축기의 제어 장치 |
| CN107218206B (zh) * | 2017-06-30 | 2019-01-18 | 青岛海尔智能技术研发有限公司 | 直线压缩机气缸变容积的控制方法 |
| US10641263B2 (en) | 2017-08-31 | 2020-05-05 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| US10670008B2 (en) | 2017-08-31 | 2020-06-02 | Haier Us Appliance Solutions, Inc. | Method for detecting head crashing in a linear compressor |
| KR101948567B1 (ko) * | 2017-10-10 | 2019-05-08 | 엘지전자 주식회사 | 리니어 압축기의 제어 장치 및 리니어 압축기의 제어 방법 |
| CN108334659B (zh) * | 2017-12-26 | 2020-06-16 | 浙江大学 | 一种线性压缩机中活塞位移相对于压力波相角的校准方法 |
| CN111564995B (zh) * | 2020-05-25 | 2021-11-19 | 华中科技大学 | 一种基于自适应全阶位移观测器的直线振荡电机控制方法 |
| US11460325B2 (en) | 2020-07-02 | 2022-10-04 | Global Cooling, Inc. | Method for and control system with piston amplitude recovery for free-piston machines |
| US12355374B2 (en) | 2023-02-09 | 2025-07-08 | Haier Us Appliance Solutions, Inc. | Field weakening for BLDC stand mixer |
| US12551060B2 (en) | 2023-02-09 | 2026-02-17 | Haier Us Appliance Solutions, Inc. | High-frequency injection for sensorless control of a BLDC stand mixer |
| US12341459B2 (en) | 2023-02-09 | 2025-06-24 | Haier Us Appliance Solutions, Inc. | Method for avoiding stalled motor in a stand mixer with sensorless BLDC drive |
| US12398717B2 (en) * | 2023-02-09 | 2025-08-26 | Haier Us Appliance Solutions, Inc. | Single phase field oriented control for a linear compressor |
| US12395103B2 (en) | 2023-03-21 | 2025-08-19 | Haier Us Appliance Solutions, Inc. | Standstill angle detection for salient motors |
| US12553432B1 (en) * | 2025-03-11 | 2026-02-17 | Haier Us Appliance Solutions, Inc. | Dynamic flux weakening for a single phase linear compressor |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4642547A (en) | 1985-08-19 | 1987-02-10 | Sunpower, Inc. | Adaptive regulation system for a linear alternator driven by a free-piston stirling engine |
| US5342176A (en) | 1993-04-05 | 1994-08-30 | Sunpower, Inc. | Method and apparatus for measuring piston position in a free piston compressor |
| US5897269A (en) | 1996-12-19 | 1999-04-27 | Precision Optics Corporation | Quick attach/release adapter mechanism |
| US5897296A (en) | 1995-11-15 | 1999-04-27 | Matsushita Electric Industrial Co., Ltd. | Vibrating compressor |
| JPH11336661A (ja) | 1998-05-22 | 1999-12-07 | Sanyo Electric Co Ltd | リニアモータ駆動往復機構の制御装置 |
| WO2000079671A1 (en) | 1999-06-21 | 2000-12-28 | Fisher & Paykel Limited | Linear motor |
| US6176683B1 (en) | 1999-04-26 | 2001-01-23 | Lg Electronics, Inc. | Output control apparatus for linear compressor and method of the same |
| BR0001404A (pt) | 2000-03-23 | 2001-11-13 | Brasil Compressores Sa | Sensor de posição e compressor |
| WO2003044365A1 (en) | 2001-11-20 | 2003-05-30 | Fisher & Paykel Appliances Limited | Linear motor controller |
| BR0203724A (pt) | 2002-09-12 | 2004-05-25 | Brasil Compressores Sa | Bomba de fluidos e placa de transferência de fluidos e sensor indutivo para bomba de fluidos |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR960015062A (ko) | 1994-10-13 | 1996-05-22 | 이대원 | 광량제어가 가능한 플래쉬를 갖춘 카메라 |
| KR960015062U (ko) | 1994-10-20 | 1996-05-17 | 가스레인지의 그릴구조 | |
| KR100237562B1 (ko) | 1996-12-31 | 2000-01-15 | 구자홍 | 리니어 컴프레서 구동회로 |
| US6537034B2 (en) * | 2000-11-29 | 2003-03-25 | Lg Electronics Inc. | Apparatus and method for controlling operation of linear compressor |
| BRPI0105524B1 (pt) * | 2000-11-29 | 2015-08-18 | Lg Electronics Inc | Aparelho e método de controle de compressor linear |
| GB0109643D0 (en) * | 2001-04-19 | 2001-06-13 | Isis Innovation | System and method for monitoring and control |
| JP3511018B2 (ja) | 2001-05-18 | 2004-03-29 | 松下電器産業株式会社 | リニアコンプレッサ駆動装置 |
| US7025571B2 (en) * | 2001-06-21 | 2006-04-11 | Lg Electronics Inc. | Apparatus and method for controlling a reciprocating compressor |
| US6682310B2 (en) | 2001-08-01 | 2004-01-27 | Lg Electronics Inc. | Apparatus and method for controlling operation of reciprocating motor compressor |
| JP2003339188A (ja) * | 2002-05-21 | 2003-11-28 | Matsushita Electric Ind Co Ltd | リニアモータの駆動装置 |
| BR0300010B1 (pt) * | 2003-01-08 | 2012-05-02 | sistema de controle de um compressor linear, método de controle de um compressor linear, compressor linear e sistema de refrigeração. | |
| JP2004336988A (ja) * | 2003-04-14 | 2004-11-25 | Matsushita Electric Ind Co Ltd | モータ駆動装置 |
| BR0302419B1 (pt) * | 2003-07-15 | 2011-09-06 | método de controle de movimento de um motor elétrico, sistema de controle de movimentação de um motor elétrico e compressor. | |
| KR100941422B1 (ko) * | 2003-08-04 | 2010-02-10 | 삼성전자주식회사 | 리니어 압축기 및 그 제어 장치 |
| BRPI0504989A (pt) * | 2005-05-06 | 2006-12-19 | Lg Electronics Inc | aparelho e método para controlar operação de compressor de alternáncia |
| JP5018357B2 (ja) * | 2007-09-05 | 2012-09-05 | アイシン精機株式会社 | リニア圧縮装置およびその制御方法 |
| KR100963742B1 (ko) * | 2007-10-24 | 2010-06-14 | 엘지전자 주식회사 | 왕복동식 압축기 |
| BRPI0800251B1 (pt) * | 2008-02-22 | 2021-02-23 | Embraco Indústria De Compressores E Soluções Em Refrigeração Ltda | sistema e método de controle de compressor linear |
-
2010
- 2010-05-05 BR BRPI1001388-1A patent/BRPI1001388A2/pt not_active Application Discontinuation
-
2011
- 2011-05-05 EP EP11738584.9A patent/EP2568179B1/en not_active Not-in-force
- 2011-05-05 CN CN201180022529.8A patent/CN102884321B/zh not_active Expired - Fee Related
- 2011-05-05 KR KR1020127024162A patent/KR20130090319A/ko not_active Ceased
- 2011-05-05 JP JP2013508333A patent/JP5873075B2/ja not_active Expired - Fee Related
- 2011-05-05 WO PCT/BR2011/000131 patent/WO2011137501A2/pt not_active Ceased
- 2011-05-05 DK DK11738584.9T patent/DK2568179T3/en active
- 2011-05-05 ES ES11738584.9T patent/ES2557464T3/es active Active
- 2011-05-05 US US13/696,253 patent/US9518578B2/en not_active Expired - Fee Related
-
2016
- 2016-10-12 US US15/291,613 patent/US9915260B2/en not_active Expired - Fee Related
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4642547A (en) | 1985-08-19 | 1987-02-10 | Sunpower, Inc. | Adaptive regulation system for a linear alternator driven by a free-piston stirling engine |
| US5342176A (en) | 1993-04-05 | 1994-08-30 | Sunpower, Inc. | Method and apparatus for measuring piston position in a free piston compressor |
| US5496153A (en) | 1993-04-05 | 1996-03-05 | Sunpower, Inc. | Method and apparatus for measuring piston position in a free piston compressor |
| US5897296A (en) | 1995-11-15 | 1999-04-27 | Matsushita Electric Industrial Co., Ltd. | Vibrating compressor |
| US5897269A (en) | 1996-12-19 | 1999-04-27 | Precision Optics Corporation | Quick attach/release adapter mechanism |
| JPH11336661A (ja) | 1998-05-22 | 1999-12-07 | Sanyo Electric Co Ltd | リニアモータ駆動往復機構の制御装置 |
| US6176683B1 (en) | 1999-04-26 | 2001-01-23 | Lg Electronics, Inc. | Output control apparatus for linear compressor and method of the same |
| WO2000079671A1 (en) | 1999-06-21 | 2000-12-28 | Fisher & Paykel Limited | Linear motor |
| BR0001404A (pt) | 2000-03-23 | 2001-11-13 | Brasil Compressores Sa | Sensor de posição e compressor |
| WO2003044365A1 (en) | 2001-11-20 | 2003-05-30 | Fisher & Paykel Appliances Limited | Linear motor controller |
| BR0203724A (pt) | 2002-09-12 | 2004-05-25 | Brasil Compressores Sa | Bomba de fluidos e placa de transferência de fluidos e sensor indutivo para bomba de fluidos |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013188940A3 (en) * | 2012-06-20 | 2014-04-17 | Whirlpool S.A. | Electric drive method for linear motor |
| US8714946B2 (en) | 2012-09-13 | 2014-05-06 | General Electric Company | Linear compressor with an electro-magnetic spring |
| US9086062B2 (en) | 2012-09-13 | 2015-07-21 | General Electric Company | Linear compressor with an electro-magnetic spring |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5873075B2 (ja) | 2016-03-01 |
| BRPI1001388A2 (pt) | 2011-12-27 |
| KR20130090319A (ko) | 2013-08-13 |
| US20170030345A1 (en) | 2017-02-02 |
| DK2568179T3 (en) | 2016-01-04 |
| EP2568179B1 (en) | 2015-10-07 |
| EP2568179A2 (en) | 2013-03-13 |
| CN102884321B (zh) | 2016-09-07 |
| US9915260B2 (en) | 2018-03-13 |
| US20130189119A1 (en) | 2013-07-25 |
| US9518578B2 (en) | 2016-12-13 |
| CN102884321A (zh) | 2013-01-16 |
| ES2557464T3 (es) | 2016-01-26 |
| WO2011137501A3 (pt) | 2012-07-05 |
| JP2013525688A (ja) | 2013-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2011137501A2 (pt) | Sistema de controle para pistão de compressor linear ressonante, método de controle para pistão de compressor linear ressonante e compressor linear ressonante | |
| KR101200206B1 (ko) | 리니어 모터와, 리니어 컴프레서, 리니어 컴프레서의제어방법, 냉각시스템 및, 리니어 컴프레서의 제어시스템 | |
| KR101436642B1 (ko) | 모터 제어 장치 및 이를 이용한 리니어 압축기 | |
| KR100963742B1 (ko) | 왕복동식 압축기 | |
| US10697444B2 (en) | Actuation system for a resonant linear compressor, method for actuating a resonant linear compressor, and resonant linear compressor | |
| BRPI1103776A2 (pt) | sistema e mÉtodo de controle de curso e operaÇço em frenquÊncia de ressonÂncia de um motor linear rossoante | |
| CN106337793B (zh) | 用于保护共振式线性压缩机的方法及系统 | |
| KR20130041119A (ko) | 공진 선형 압축기를 위한 제어 방법 및 냉각 시스템에 적용된 공진 선형 압축기를 위한 전자 제어 시스템 | |
| CN106468486B (zh) | 超低温制冷机 | |
| JP2006515738A (ja) | リニアコンプレッサ制御システム、リニアコンプレッサの制御方法、リニアコンプレッサおよび冷却システム | |
| US7816873B2 (en) | Linear compressor | |
| Dainez et al. | An adaptive resonant controller applied to a linear resonant compressor | |
| KR100576032B1 (ko) | 리니어 압축기의 제어장치 및 제어방법 | |
| KR101379125B1 (ko) | 왕복동식 압축기 | |
| CN103097729B (zh) | 适用于冷却系统的用于谐振线性压缩机的控制方法和用于谐振线性压缩机的电子控制系统 | |
| Benecke et al. | Design and control of a linear reluctance motor for a vacuum diaphragm pump | |
| Lilie | FMT FG FML FAM | |
| KR20010080812A (ko) | 선형압축기의 모터 역기전력 상수 보상 방법 | |
| KR20010080811A (ko) | 선형압축기의 피스톤 평균 밀림량 측정 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201180022529.8 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11738584 Country of ref document: EP Kind code of ref document: A2 |
|
| ENP | Entry into the national phase |
Ref document number: 20127024162 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011738584 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2013508333 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13696253 Country of ref document: US |