WO2012057592A2 - Système et procédé pour contrôler des installations ferroviaires à l'aide d'un véhicule ferroviaire - Google Patents
Système et procédé pour contrôler des installations ferroviaires à l'aide d'un véhicule ferroviaire Download PDFInfo
- Publication number
- WO2012057592A2 WO2012057592A2 PCT/KR2011/008232 KR2011008232W WO2012057592A2 WO 2012057592 A2 WO2012057592 A2 WO 2012057592A2 KR 2011008232 W KR2011008232 W KR 2011008232W WO 2012057592 A2 WO2012057592 A2 WO 2012057592A2
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- unit
- image
- vehicle
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/04—Control, warning or like safety means along the route or between vehicles or trains for monitoring the mechanical state of the route
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61K—AUXILIARY EQUIPMENT SPECIALLY ADAPTED FOR RAILWAYS, NOT OTHERWISE PROVIDED FOR
- B61K9/00—Railway vehicle profile gauges; Detecting or indicating overheating of components; Apparatus on locomotives or cars to indicate bad track sections; General design of track recording vehicles
- B61K9/08—Measuring installations for surveying permanent way
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0081—On-board diagnosis or maintenance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/04—Control, warning or like safety means along the route or between vehicles or trains for monitoring the mechanical state of the route
- B61L23/041—Obstacle detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/04—Control, warning or like safety means along the route or between vehicles or trains for monitoring the mechanical state of the route
- B61L23/042—Track changes detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/50—Trackside diagnosis or maintenance, e.g. software upgrades
- B61L27/53—Trackside diagnosis or maintenance, e.g. software upgrades for trackside elements or systems, e.g. trackside supervision of trackside control system conditions
Definitions
- the present invention relates to a railroad facility monitoring system using a railroad vehicle, comprising a surveillance camera mounted on a tracked vehicle to acquire and store images of railroad tracks, tram lines and other structures, and to generate noise and vibration sensors.
- the present invention relates to a railroad facility monitoring system and method using a tracked vehicle for remotely monitoring the acquired noise and vibration data, and transmitting and storing each acquired data to a center system and transmitting the data to a terminal of a situation room.
- Korean Utility Model Registration Application No. 10-2002-0017365 discloses a crack detection and image processing apparatus for concrete structures, which may occur in tunnels such as subways or roads, as well as leaking points and corrosion. By detecting and processing the back light, the processed image is displayed through the in-house computer system so that the crack of the tunnel can be easily determined.
- Korean Patent Registration No. 10-0898061 discloses a hybrid tunnel scanning device, which includes a laser and an image at the same time, and analyzes the contents of the data in real time from the laser scanning data, Lining damage and facilities), and derive the coordinate values of the corresponding location, based on the coordinate value, the hybrid tunnel scanning device capable of more accurate and efficient scanning by taking a local image and data acquired Providing.
- the hybrid tunnel scanning system is composed of a laser scanner, an image acquisition device, an image acquisition device driver and a self-propelled bogie, the laser scanner lining the tunnel And it is mounted to the front of the moving direction of the self-propelled bogie as primarily for performing the scanning of the inside of the tunnel, such as facilities.
- measurement data detected by the laser scanner is transmitted to the laser scanner controller while the self-propelled bogie moves the tunnel in the axial direction, and the laser scanner controller acquires the measured measurement.
- the characteristics and coordinates of the photographing location are extracted from the data, the abnormalities or the additional observation points are determined, and the coordinate values are transmitted to the image acquisition apparatus driving control unit.
- the image acquisition device driving control unit transfers the coordinate values received through the laser scanner control unit to the image acquisition device, the image acquisition device captures the coordinates thereof and acquires the image data, and the image acquisition device control unit acquires the local image. do.
- the data measured by the laser scanner is used for facility management for virtual engineering by the laser scanner control unit, and the image processing and analysis through the image acquisition device control is implemented as a comprehensive tunnel maintenance system.
- the defect portion and the additional photographing part are captured by the image capturing device through the image capturing apparatus, thereby obtaining image data, thereby enabling faster and more accurate in the tunnel.
- Scanning is possible, and the image can have a three-dimensional coordinate value by combining laser scanning and image scanning, and thus various expressions can be provided, thereby providing a hybrid tunnel scanning apparatus that can be implemented as a comprehensive tunnel maintenance system.
- the hybrid tunnel scanning apparatus can only diagnose defects such as deformation or cracks in the structure of the tunnel wall mainly by scanning data obtained by performing laser scanning first and second image scanning. There was a problem in diagnosing a state of a tram line or track.
- the present invention stores the images obtained through the tunnel structure monitoring camera, the tramline monitoring camera and the track monitoring camera mounted on the tracked vehicle, and transmits to the server unit to store and transmit them to the terminal room terminal remotely to each facility
- the purpose of the present invention is to provide a railroad facility inspection system using tracked vehicles to search and inspect the vehicle.
- Another object of the present invention is equipped with a noise / vibration information collecting device on the track vehicle and transmitted to the server unit along with the image information, and obtained through the vibration, noise and tilt sensor of the track vehicle for analyzing the riding comfort of the track vehicle as well as the image. To provide the corrected information.
- Another object of the present invention is to provide a tunnel structure monitoring camera, a catenary surveillance camera, a track monitoring camera mounted on a single track vehicle, as well as a track, vibration and noise sensor of each track structure, tram line and track. It is not only possible to acquire image information and vibration, noise and tilt data of a track vehicle at the same time, but also to store and provide the image information and track vehicle vibration, noise and tilt data in synchronization with the position information by position information calculation. There is this.
- Another object of the present invention is to determine that the image is obtained from the vibration sensor and the noise sensor and the vibration / noise data obtained from the same position more than the reference value set in the same position to determine the alarm position and alert.
- the railroad facility inspection system using a track vehicle includes an information acquisition device for acquiring information while mounting and moving a sensor unit and a surveillance camera unit on a track vehicle, and storing data wirelessly transmitted from the information acquisition device in a database.
- a railway facility inspection system using a track vehicle comprising a server unit for transmitting to a situation room terminal for searching, editing, and diagnosing data obtained while moving a track vehicle, the information acquisition device comprising: an illumination unit driven in synchronization with a shutter of the surveillance camera unit; A sensor unit for obtaining vibration and noise information of the tracked vehicle; A location information calculation unit for counting and providing driving location information of the track vehicle; And a controller configured to control driving of the lighting unit, and to wirelessly transmit the image information obtained from the surveillance camera unit, the vibration and noise information obtained from the sensor unit, and the position information obtained through the location information calculator to the server unit.
- the server unit comprises: an image storage server configured to store image information transmitted from the information acquisition device in the database in synchronization with distance information together with noise and vibration data; An image search server for searching and editing images stored in the database; A file server that manages meta information on data stored in the database and enables the situation room terminal to search and edit the data; And a DB management server for managing a database of the image data stored in the database.
- Railroad facility information acquisition process using a tracked vehicle to achieve another object of the present invention is obtained by mounting and moving the information acquisition device including a camera unit, a lighting unit, a sensor unit, a location information calculation unit consisting of a plurality of surveillance cameras on the tracked vehicle.
- each image photographed by each surveillance camera by the information acquisition device A first step of acquiring the noise and vibration data acquired by the sensor unit and the distance information from the position information calculating unit and transmitting the noise and vibration data to the server unit to store in a database; A second step of calculating, by the server unit, an acquisition position of each image, noise and vibration data by synchronizing each image, noise and vibration data stored in a database with the position information; And a third step of transmitting each image, noise, and vibration data stored in synchronization with the location information in the database to the situation terminal.
- the information acquisition device After collecting the noise and vibration data obtained from the noise and vibration sensor mounted on the track vehicle through the information acquisition device, calculating the acquisition position of the noise and vibration data in synchronization with the position information; And determining that the image, noise, and vibration data are determined as a defect section when a predetermined reference value or more is obtained.
- the railroad facility inspection system using the track vehicle according to the present invention stores the separate specific images obtained through the tunnel structure monitoring camera, the tramline monitoring camera and the track monitoring camera mounted on one tracked vehicle, and transmits them to the server unit. Since it is stored and sent to the situation terminal, tunnel structures, tram lines and tracks can be checked and analyzed remotely.
- the present invention has the effect that can analyze the riding comfort of the vehicle by the information collected through the noise / vibration, tilt information collection sensor to the tracked vehicle.
- FIG. 2 is an overall configuration diagram of a railway facility inspection system using a track vehicle according to an embodiment of the present invention
- Figure 3a, 3b is an overall configuration of the railroad facility inspection system using a tracked vehicle according to another embodiment of the present invention
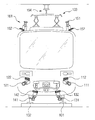
- FIGS. 4 and 5 are front and side views of the tracked vehicle equipped with each surveillance camera according to an embodiment of the present invention.
- 6A to 6C are diagrams illustrating an embodiment of an image acquired through each surveillance camera and an image collected through a noise / vibration sensor.
- FIG. 7 is a graph illustrating an embodiment of an image and a noise / vibration signal collected through an image and a noise / vibration sensor acquired through each surveillance camera.
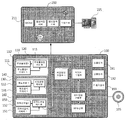
- FIG. 2 is a block diagram of a railroad facility inspection system using a tracked vehicle according to an embodiment of the present invention
- the information acquisition device 100 is mounted on the tracked vehicle to obtain the railroad facility image and noise, vibration data and the information It is composed of a server unit 200 for transmitting the image, noise and vibration data from the acquisition apparatus 100 to the situation room terminal 221 to receive, store and analyze the radio transmission.
- the information acquiring device 100 includes a camera unit 111 for acquiring railway facilities mounted on a track vehicle, an illumination unit 112 driven in synchronization with a shutter of the camera unit 111, and the track vehicle.
- Sensor unit 190 for acquiring vibration and noise information
- tacommeter 186 for counting and providing driving position information of the tracked vehicle, and driving control of the lighting unit 112, and image information obtained from the camera unit.
- controller 170 for wirelessly transmitting the vibration and noise information obtained from the sensor unit and the position information obtained through the position information calculation unit to the server unit.
- the server unit 200 stores the image information transmitted from the information acquisition device 100 in the database 210 in synchronization with the location information along with the noise and vibration data, and the database ( Image search server 213 for searching and editing the image stored in the 210, and the file server for managing the meta information about the data stored in the database 210, the situation terminal 221 to search and edit ( 214 and a DB management server 211 for database management for the image, noise, vibration data stored in the database 210.
- Figure 3a is a block diagram of a railroad facility inspection system using a track vehicle according to another embodiment of the present invention
- the information acquisition device 100 is mounted on the left and right of the front of the track vehicle to monitor the left and right environment of the tunnel
- Left and right structure image acquisition devices 110 and 120 for acquiring an image
- left and right track image acquisition devices 130 mounted on the front left and right sides of a tracked vehicle, respectively, to acquire images of left and right tracks.
- 140 and left and right tramline image acquisition devices 150 and 160 for acquiring left and right images of a tramline, respectively, and are mounted inside a tracked vehicle to acquire noise, vibration and tilt data of a vehicle while driving.
- Noise sensor 191, vibration sensor 192 and inclination sensor 193, location information calculation unit 180 for obtaining location information when the track vehicle is running, and each of the sensors 191 to 193 and location information calculation
- a data collector 173 for collecting each data from the unit 180; Group receives the respective data from the data acquisition unit 173, the location information is composed of location information the vehicle information storage unit 171 (172) for storing in synchronism with each of the acquired data according to the calculation section 180.
- the position information calculation unit 180 is composed of a tachometer for measuring the number of revolutions of the wheel 105 or an acceleration sensor for measuring the driving acceleration of the tracked vehicle.
- the left and right structure image obtaining apparatuses 110 and 120 illuminate according to the shutter speeds of the structure monitoring cameras 111 and 121 and the structure monitoring cameras 111 and 121 for acquiring an image of the structure.
- the left and right track image acquisition devices 130 and 140 are mounted on the front left and right sides of the tracked vehicle, and the left and right track track cameras 131 which acquire images of the left and right tracks 101 and 102. 141, each of the track lights 132 and 142 that irradiate lights according to the shutter speeds of the track cameras 131 and 141, and the track lights 132 and 142 of the tracks. It consists of a track lighting control unit 133 for controlling to drive in synchronization with the shutter speed of the monitoring cameras (131, 141).
- the left and right tramline image acquisition devices 150 and 160 monitor left and right tramline which acquires images of the tramline 104 on the left and right sides of the roof of the tracked vehicle on which the upper pantagraph 103 of the tracked vehicle is installed.
- It is composed of a catenary light control unit 153 for controlling to drive in synchronization with the shutter speed of each of the catenary cameras (151, 161).
- the server unit 200 is a database 210 for receiving and storing the vehicle information obtained by the information acquisition device 100 via a wireless Internet or a local area wireless communication network, and a database for each data stored in the database 210.
- DB server 211 for establishing and managing the image
- image storage server 212 for storing the image and the ride comfort analysis data of the database 210
- image search server for searching the image
- ride comfort analysis data of the database 210 123 a file server 124 that manages meta information about data stored in the database 210 and enables the situation terminal 221 to be searchable and editable.
- the track vehicle using the track such as a train, subway or train
- the front and surrounding environment image, the track image and the tram line image supplied with power the vehicle vibration, noise for analyzing the riding comfort And acquire and store data of the detected tilt.
- 4 and 5 are mounted on the front and top of the track vehicle according to an embodiment of the present invention is a mounting view of the surveillance camera and lighting device for image acquisition, two structure surveillance cameras on the front left and right center height of the track vehicle Mounting the 111 and 121 and each of the structure lights 112 and 122, while driving the track vehicle, to obtain an image of the surrounding environment in front of the track vehicle.
- the front image obtained from the surveillance camera of one of the left or right structure surveillance cameras 111 and 121 is transmitted to the server unit 200 in real time through a wireless LAN or a WiBro network and displayed on the situation room monitor for real-time monitoring. To be done.
- a structure video obtained by installing a separate video camera on one side of the front or rear side of the tracked vehicle is transferred to the operation room through the WiBro network. It transmits remotely, so that the vehicle can be monitored in real time while driving.
- FIG. 6A illustrates an image obtained by the structure surveillance cameras 111 and 121.
- the vehicle information storage unit 171 may be obtained by obtaining an entire front image including a front environment of a tunnel, a wall, a ceiling, a tramline, and a track. ).
- the structure lighting control unit 113 controls the lighting according to the shutter speed during high-speed shutter speed shooting to obtain a clear shot image during high-speed operation, and selects the best shooting position and the shooting angle for monitoring the key point.
- the underground tunnel section is dark because there is no lighting, so it is necessary to secure enough lighting brightness for high-speed camera image acquisition.It depends on the lighting projection method, the type of lighting used, or the angle of projection. It should be adjusted.
- each of the surveillance cameras 111 and 121 should be set to adjust the angle through the camera test in order to ensure a clear image of the upper and left and right portions of the tunnel, and the illumination of sufficient brightness for shooting in the far distance must be provided. .
- FIG. 6B illustrates an image obtained by the track monitoring cameras 131 and 141, and two track monitoring cameras 131 and 141 and respective track lightings to the left and right of the front lower end of the track vehicle.
- 132 and 142 are mounted to acquire left and right track 101 and 102 images.
- the trajectory monitoring image adjusts the photographing angle and the focus of the camera to obtain the intermediate distance image, not the far image as in the structure image of FIG. 6A.
- FIG. 6C illustrates an example of a tramline image obtained by the tramline surveillance cameras 151 and 161.
- the tramline surveillance cameras 151 and 161 mounted on one side of the left and right sides of the panda graph 103 and each of The left and right images of the tramline are acquired by driving the tramline lights 152 and 162.
- the tramline surveillance cameras 151 and 161 should acquire a clear image for monitoring the power supply line and insulator portion of the tramline 104, insulator clips and bolts, and the tramline surveillance cameras 151 and 161 are tracked vehicles. Since it is installed on the roof surface of the tram line 104 to be photographed, the camera focus and lighting must be adjusted for close range shooting.
- Each of the surveillance cameras 111 to 161 uses a high-speed special imaging camera and must obtain a real-time image from a train operating at a high speed, and must continuously capture a still image rather than a video to obtain a clear image.
- a clear still image is obtained at a high shutter speed of 1/2000 second or more.
- a sufficient amount of light is required. In other words, bright lighting is required, and the flash type lighting is brighter than the regular scanning method, so that the flash type lighting is driven in synchronization with the shutter speed of the camera.
- the tracked vehicle travels 25 meters per second at 90 km / h. Assuming the camera's shooting angle is 2 m, more than 13 frames per second are required. Therefore, in order to acquire a clear still image, an image acquisition of 15 FPS or more is obtained.
- each of the illumination and lighting control unit 112, 113, 132, 133, 152, 153 of each image acquisition device (110 ⁇ 160) is the brightness of 1 / 2500sec or more It must be guaranteed, it must support hardware trigger synchronization, and it must support 100SPS (Spot Per Sec).
- each sensor data obtained from the sensors 191 to 193 mounted on one side of the lower seat of the tracked vehicle is transmitted to the vehicle information storage unit 171 through the data collection unit 173 and stored.
- the data collector 173 stores the distance and location information converted by the location information calculator 180 in the vehicle information storage unit 171 and 172 at the same time.
- the position information calculation unit 180 is equipped with a tachometer 186 on one side of the wheel 105 of the vehicle to convert the distance information and position information according to the rotation speed of the wheel.
- Another embodiment of the position information calculation unit 180 provides the driving acceleration of the vehicle measured using a three-axis acceleration sensor such as a gyro sensor converted into distance and position information.
- a three-axis acceleration sensor such as a gyro sensor converted into distance and position information.
- the location information calculation unit 180 starts the distance measurement when starting from each station, and ends the distance measurement when stopping at the next stop. That is, by repeating this for each station, the distance and position information between stations of the tracked vehicle are calculated and stored.
- the RF receiver 181 is mounted on the tracked vehicle, and the RF receiver 181 receives the RF signal from the RF transmitter (not shown) provided in each station, and thus the position information calculator 180. Reset the measuring position of to start the re-measurement.
- the actual position coordinate (latitude and longitude) information of each station is stored in the vehicle information storage units 171 and 172.
- the RF signal is received from the RF receiver 181 whenever passing through each station to recognize the actual position coordinate information of the current station.
- the location information calculation unit 180 recalculates the distance data based on the recognized actual location coordinate information, thereby obtaining a more accurate location.
- the position information of the tracked vehicle is transmitted and stored in the data collection unit 173, and the position information of the tracked vehicle is synchronized with the image data when the tracked vehicle moves between stations, so that the position of acquiring each image data can be determined.
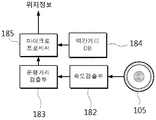
- 3B is a block diagram of a location information calculation unit according to another embodiment of the present invention, wherein the location information calculation unit 180 receives a rotation pulse from a sensor installed in a wheel 105 of a tracked vehicle to detect a speed thereof.
- the driving unit 173 receives a driving distance input from the driving distance detecting unit 183 and the driving distance detecting unit 183 that calculates the driving distance of the tracked vehicle based on the signal output from the speed detecting unit, and the reverse distance information.
- the microprocessor 185 calculates the position information of the tracked vehicle based on the reverse distance data input from the stored reverse distance database 184 and outputs the position information of the track vehicle to the data collection unit 173.
- the position information calculation unit 180 configured as described above is configured to generate a speed and speed by the rotation speed input from the rotation detection sensor (not shown) installed on the wheel 105 by the speed detection unit 173 and the travel distance detection unit 183. Calculate the distance traveled.
- the travel distance calculated by the travel distance detection unit 183 receives the distance information between the stations from the station distance database 184 in the microprocessor 185 and calculates the distance and position information when the track vehicle starts again to collect the data.
- the image data is stored in the vehicle information storage units 171 and 172 through the unit 173.
- the vehicle information storage units 171 and 172 not only provide the structure, track, and tramline image data to the position data input from the position information calculation unit 180, but also the noise, vibration, and slope data (not shown in the drawing). Synchronize time) so that each data location can be identified.
- the three-axis acceleration sensor of the X, Y, Z axis configured in one embodiment of the vibration sensor 193 is obtained by the vibration data in real time, so as to display in the track position area when providing the track status data matching the time domain and time table Vibration and noise data can be displayed in the frequency domain in real time.
- the vehicle information storage unit 171 and 172 wirelessly transmit the acquired and stored vehicle information to the server unit 200 through the control unit 170 or by configuring a removable storage device to separate from the vehicle every day or at regular intervals, and Direct connection to the database 210 of the server unit 200 to be stored.
- the vehicle information storage unit 171, 172 is required to obtain a still image of at least 15 FPS for the left, right image of the structure, track, the tram line, so that a large amount of image data is stored at least two or more vehicle information
- the storage unit 171 and 172 may be configured to not only distribute the load of the real-time video storage but also to easily replace the storage device.
- the server unit 200 supports a high-speed network to store, search, and edit images transmitted from the vehicle information storage units 171 and 172 of each track vehicle in the database 210, and a file server 214. Provided to the situation room terminal 221 through.
- the database 210 is a large storage device, and supports read / write performance of up to 2GB / s.
- the image storage server 212 provides a gateway server function for storing the image obtained from the tracked vehicle in the database 210.
- the image search server 213 is a server that performs a function of searching and editing an image stored in the database 210, and the file server 214 manages meta information about data stored in the database 210.
- the situation room terminal 221 performs a gateway function to enable the search for the image data stored in the database 210
- the DB server 211 manages a database for the image data stored in the database 210 Perform
- the situation room terminal 221 is displayed through the server unit 200.
- the situation terminal 221 displays each video signal and noise / vibration signal on a monitor, extracts an image and noise / vibration signal that are expected to cause a defect, and calculates and alerts to a defect occurrence position.
- each of the image signals CH01 to CH06 acquired from the surveillance cameras 111 to 161 are each composed of a series of similar images, each of which is a high-speed photographed structure, track, and tramline image data.
- the average value of is calculated and set as the reference image, and when it deviates from the reference image signal, it is extracted as an image that is expected to cause defects.
- the expected position of the extracted defect occurrence image is synchronized with the position information, and the position data is calculated by the position information, thereby accurately calculating the position of the image where the defect occurrence is expected.
- each signal obtained from the noise, the vibration sensor 191, 192 or the tilt sensor 193 is extracted with the noise or vibration data filtering the white noise and the vehicle's own vibration as shown in the CH08, CH09 signal of FIG. If the extracted noise or vibration data is larger than the reference value set as the average value, it is determined that a defect is generated at the corresponding position.
- the noise and vibration signals determine that a major defect has occurred at the corresponding position and alert through the situation terminal 221.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Train Traffic Observation, Control, And Security (AREA)
Abstract
La présente invention porte sur un système pour contrôler des installations ferroviaires à l'aide d'un véhicule ferroviaire. Le système pour contrôler des installations ferroviaires comprend un dispositif d'acquisition d'informations qui est formé par montage d'une caméra de contrôle sur un véhicule ferroviaire, qui acquiert et qui sauvegarde des images de structures de tunnel, de lignes de chemins de fer, et de lignes de véhicules électriques tandis qu'il est mobile, et qui sauvegarde des données de bruit et de vibrations collectées par une unité de capteur montée sur le véhicule ferroviaire ; et une unité de serveur qui reçoit des données collectées par le dispositif d'acquisition d'informations, qui sauvegarde les données reçues dans une base de données, et qui fournit à un terminal d'un centre de commande des images et des données sauvegardées dans la base de données pour l'inspection des images et des données. Selon la présente invention, des structures de tunnel, des lignes de chemins de fer et des lignes de véhicules électriques peuvent être inspectées et analysées à partir d'un emplacement distant.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100106605A KR101111569B1 (ko) | 2010-07-08 | 2010-10-29 | 궤도차량을 이용한 철도시설물 감시시스템 및 방법 |
| KR10-2010-0106605 | 2010-10-29 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| WO2012057592A2 true WO2012057592A2 (fr) | 2012-05-03 |
| WO2012057592A3 WO2012057592A3 (fr) | 2012-07-05 |
Family
ID=45997568
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2011/008232 Ceased WO2012057592A2 (fr) | 2010-10-29 | 2011-10-31 | Système et procédé pour contrôler des installations ferroviaires à l'aide d'un véhicule ferroviaire |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2012057592A2 (fr) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103558814A (zh) * | 2013-09-10 | 2014-02-05 | 昆山新金福精密电子有限公司 | 一种供水测控系统 |
| WO2017034531A1 (fr) * | 2015-08-21 | 2017-03-02 | Hewlett Packard Enterprise Development Lp | Collecte de données sensible au contexte numérique |
| CN106774022A (zh) * | 2017-02-20 | 2017-05-31 | 四川隧唐科技股份有限公司 | 一种车载式多维隧道数据采集系统及其协同工作方法 |
| CN107628064A (zh) * | 2017-10-17 | 2018-01-26 | 青藏铁路公司 | 一种铁路专用线车辆安全监测装置及方法 |
| CN108657223A (zh) * | 2018-07-23 | 2018-10-16 | 中国安全生产科学研究院 | 一种城市轨道交通自动巡检系统及隧道形变检测方法 |
| CN110986833A (zh) * | 2019-12-25 | 2020-04-10 | 苏州伟信奥图智能科技有限公司 | 一种轨道直线度测量方法及其装置 |
| CN111027903A (zh) * | 2019-12-03 | 2020-04-17 | 中铁第一勘察设计院集团有限公司 | 基于高精度车载移动测量系统无咋轨道资产台账调查方法 |
| CN112339791A (zh) * | 2020-10-31 | 2021-02-09 | 六安德玛机械设备有限公司 | 一种隧道内轨道车轨固定性检测装置及检测方法 |
| CN113715868A (zh) * | 2021-06-17 | 2021-11-30 | 上海应用技术大学 | 基于时间空间耦合的远程轨道检测系统 |
| CN114701543A (zh) * | 2022-04-27 | 2022-07-05 | 中铁第四勘察设计院集团有限公司 | 基于大数据的高精度设备限界检测预警系统及方法 |
| CN118850135A (zh) * | 2024-07-08 | 2024-10-29 | 四川文理学院 | 基于多传感应用的轨道裂纹监测方法及系统 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100898061B1 (ko) * | 2007-05-25 | 2009-05-19 | 한국철도기술연구원 | 하이브리드 터널 스캐닝 장치 |
| KR20090056086A (ko) * | 2007-11-29 | 2009-06-03 | 한국건설기술연구원 | 철도 시설물 안전 모니터링 시스템 및 방법 |
| KR100976055B1 (ko) * | 2008-08-14 | 2010-08-17 | 금천씨스템 (주) | 궤도틀림실시간감시시스템 |
| KR101016024B1 (ko) * | 2008-09-03 | 2011-02-23 | 투아이시스(주) | 스테레오 비전 방식을 이용한 전차선 측정 시스템 |
-
2011
- 2011-10-31 WO PCT/KR2011/008232 patent/WO2012057592A2/fr not_active Ceased
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103558814A (zh) * | 2013-09-10 | 2014-02-05 | 昆山新金福精密电子有限公司 | 一种供水测控系统 |
| WO2017034531A1 (fr) * | 2015-08-21 | 2017-03-02 | Hewlett Packard Enterprise Development Lp | Collecte de données sensible au contexte numérique |
| US20180251141A1 (en) * | 2015-08-21 | 2018-09-06 | Ent. Services Development Corporation Lp | Digital context-aware data collection |
| US20250042453A1 (en) * | 2015-08-21 | 2025-02-06 | Ent. Services Development Corporation Lp | Digital context-aware data collection |
| CN106774022A (zh) * | 2017-02-20 | 2017-05-31 | 四川隧唐科技股份有限公司 | 一种车载式多维隧道数据采集系统及其协同工作方法 |
| CN106774022B (zh) * | 2017-02-20 | 2023-12-05 | 四川隧唐科技股份有限公司 | 一种车载式多维隧道数据采集系统及其协同工作方法 |
| CN107628064A (zh) * | 2017-10-17 | 2018-01-26 | 青藏铁路公司 | 一种铁路专用线车辆安全监测装置及方法 |
| CN108657223B (zh) * | 2018-07-23 | 2023-06-06 | 中国安全生产科学研究院 | 一种城市轨道交通自动巡检系统及隧道形变检测方法 |
| CN108657223A (zh) * | 2018-07-23 | 2018-10-16 | 中国安全生产科学研究院 | 一种城市轨道交通自动巡检系统及隧道形变检测方法 |
| CN111027903B (zh) * | 2019-12-03 | 2023-05-12 | 中铁第一勘察设计院集团有限公司 | 基于高精度车载移动测量系统无砟轨道资产台账调查方法 |
| CN111027903A (zh) * | 2019-12-03 | 2020-04-17 | 中铁第一勘察设计院集团有限公司 | 基于高精度车载移动测量系统无咋轨道资产台账调查方法 |
| CN110986833A (zh) * | 2019-12-25 | 2020-04-10 | 苏州伟信奥图智能科技有限公司 | 一种轨道直线度测量方法及其装置 |
| CN112339791A (zh) * | 2020-10-31 | 2021-02-09 | 六安德玛机械设备有限公司 | 一种隧道内轨道车轨固定性检测装置及检测方法 |
| CN113715868A (zh) * | 2021-06-17 | 2021-11-30 | 上海应用技术大学 | 基于时间空间耦合的远程轨道检测系统 |
| CN114701543A (zh) * | 2022-04-27 | 2022-07-05 | 中铁第四勘察设计院集团有限公司 | 基于大数据的高精度设备限界检测预警系统及方法 |
| CN114701543B (zh) * | 2022-04-27 | 2023-10-17 | 中铁第四勘察设计院集团有限公司 | 基于大数据的高精度设备限界检测预警系统及方法 |
| CN118850135A (zh) * | 2024-07-08 | 2024-10-29 | 四川文理学院 | 基于多传感应用的轨道裂纹监测方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012057592A3 (fr) | 2012-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101111569B1 (ko) | 궤도차량을 이용한 철도시설물 감시시스템 및 방법 | |
| WO2012057592A2 (fr) | Système et procédé pour contrôler des installations ferroviaires à l'aide d'un véhicule ferroviaire | |
| CN209070035U (zh) | 一种轨道交通电客车接触网悬挂综合检测装置 | |
| CN102759347B (zh) | 一种高铁接触网在线巡检装置、巡检方法以及其检测系统 | |
| CN202098297U (zh) | 接触网关键悬挂自动巡查装置 | |
| CN200964120Y (zh) | 高速车载式轨道图像识别系统 | |
| CN201429413Y (zh) | 高速列车受电弓状态在线式自动检测系统 | |
| CN206983987U (zh) | 铁路线路设备外观巡检系统 | |
| CN106049210A (zh) | 一种轨道状态智能检测平台 | |
| CN111413353A (zh) | 一种隧道衬砌病害综合检测车 | |
| KR101701160B1 (ko) | 가동브래킷 변형 검사 시스템 | |
| CN103729908A (zh) | 铁路隧道智能巡检装置及其使用方法 | |
| CN105115605A (zh) | 轨道列车红外检测系统及检测方法 | |
| CN113011252B (zh) | 轨道异物侵限检测系统及方法 | |
| CN106679723A (zh) | 一种公路隧道检测车系统 | |
| CN101424529B (zh) | 列车扫描系统 | |
| CN115035087A (zh) | 一种新型铁路线路图像检测方法及系统 | |
| CN221085925U (zh) | 一种煤磨设备巡检系统 | |
| JP2019079303A (ja) | 道路設備点検システムおよび道路設備点検方法、ならびにそれに使用されるサーバ | |
| CN208239314U (zh) | 列车定检系统 | |
| CN212579856U (zh) | 一种轨道巡检仪 | |
| CN211335993U (zh) | 一种地铁车辆360°故障图像检测系统 | |
| CN104477207B (zh) | 一种车载轨腰连接件外观检测系统 | |
| CN205157057U (zh) | 轨道列车红外检测系统 | |
| CN104374375B (zh) | 一种车载应答器外观检测系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11836684 Country of ref document: EP Kind code of ref document: A2 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 11836684 Country of ref document: EP Kind code of ref document: A2 |