WO2014104088A1 - 手術ロボット - Google Patents
手術ロボット Download PDFInfo
- Publication number
- WO2014104088A1 WO2014104088A1 PCT/JP2013/084647 JP2013084647W WO2014104088A1 WO 2014104088 A1 WO2014104088 A1 WO 2014104088A1 JP 2013084647 W JP2013084647 W JP 2013084647W WO 2014104088 A1 WO2014104088 A1 WO 2014104088A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- display
- surgical robot
- medical instrument
- robot according
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/0046—Surgical instruments, devices or methods with a releasable handle; with handle and operating part separable
- A61B2017/00464—Surgical instruments, devices or methods with a releasable handle; with handle and operating part separable for use with different instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
- A61B2090/0811—Indication means for the position of a particular part of an instrument with respect to the rest of the instrument, e.g. position of the anvil of a stapling instrument
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39468—Changeable hand, tool, code carrier, detector
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45117—Medical, radio surgery manipulator
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
- G16H20/40—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to mechanical, radiation or invasive therapies, e.g. surgery, laser therapy, dialysis or acupuncture
Definitions
- the present invention relates to a surgical robot that assists surgery using a plurality of medical instruments.
- Patent Document 1 a plurality of medical instruments are operated with a common input unit of a surgical robot.
- Patent Document 1 When a medical device to be operated is selected from a plurality of medical devices and operated by a common input unit of a surgical robot, the operation directions of all the medical devices are displayed at the same time regardless of whether or not they are selected.
- Patent Document 1 the operator cannot easily determine which medical instrument is selected, and there are a plurality of surgical instruments provided in the input part of the surgical robot. It has not been possible to easily determine which switch corresponds to which operation of the selected medical instrument.
- the present invention has been made in view of the above-described problems of the prior art, and an object of the present invention is to provide a surgical robot that allows an operator to easily determine which medical instrument is selected.
- a surgical robot includes a robot body that selectively operates a plurality of medical instruments, and a common input for the plurality of medical instruments for inputting control information of the robot bodies. And a display means for displaying an image of a surgical site of a patient, the display means having a selection status display function for displaying a selection status of the plurality of medical instruments.
- the selection status display function displays a mark and / or a character for specifying the selected medical device on the screen of the display means.
- the mark and / or character is displayed at least partially superimposed on the medical device.
- the selection status display function is to display the selection status for the plurality of medical devices on the screen of the display means, and then erase the display of the selection status after a predetermined time has elapsed.
- the display means has a function of invalidating the selection status display function.
- the input unit includes a plurality of operation units corresponding to a plurality of operation contents of the medical instrument, and the plurality of operation units include objects to be detected for detecting an operation state of each operation unit.
- An operation state detection unit is provided, and the display unit has an operation content display function for displaying the operation content of the medical instrument corresponding to the operation unit in which the operation state is detected by the operation state detection unit.
- the operation content display function displays a mark reminiscent of the operation content.
- the mark reminiscent of the operation content is displayed at least partially overlapping the medical device.
- the operation content display function is to display the operation content on the screen of the display means and then to turn off the display of the operation content after a predetermined time has elapsed.
- the display means has a function of invalidating the operation content display function.
- the operated state detecting means is a contact and / or proximity sensor.
- the operation unit has a first operation state and a second operation state in which an operation further proceeds from the first operation state, and the operation content display function is the first operation state.
- the operation content of the medical instrument is displayed.
- the operation unit includes a push button switch
- the first operation state is a half-pressed state of the push button switch
- the second operation state is the push button switch. It is a state where it is pushed further from the half-pressed state.
- the display means further has a switch display function for displaying various switches
- the input means has an operation unit for operating a desired switch among the various switches.
- the display means is provided with a plurality of displays corresponding to each of the plurality of input means.
- the input unit has a movable operation unit for moving at least one of the plurality of medical instruments
- the display unit is an operation amount of the medical instrument with respect to an operation amount of the movable operation unit. Is the reciprocal of the display magnification of the medical device.
- the display means for displaying the image of the surgical site of the patient is displayed with the selection status for a plurality of medical instruments, so which medical instrument is selected, The operator can easily determine.
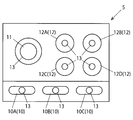
- FIG. 2 is a plan view schematically showing an enlarged operation panel of input means of the surgical robot shown in FIG. 1.
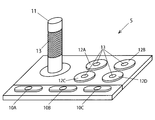
- FIG. 2 is a perspective view schematically showing an enlarged operation panel of an input unit of the surgical robot shown in FIG. 1.
- the schematic diagram which showed the example of a display of the display of the surgical robot shown in FIG. The schematic diagram for demonstrating the function of the surgery robot shown in FIG.
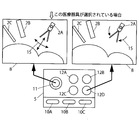
- the schematic diagram for demonstrating the function of the surgery robot shown in FIG. It is the model which showed the modification of the surgery robot shown in FIG. 1, (a) shows the example of a display, (b) has shown the operating panel of the input means. It is the model which showed the other modification of the surgical robot shown in FIG.
- FIGS. 1 to 5 a surgical robot according to an embodiment of the present invention will be described with reference to FIGS. 1 to 5.
- the surgical robot 1 has a robot body 4 having a robot arm 3 to which a medical instrument 2 (2A, 2B, 2C) is attached at the tip.
- a medical instrument 2 (2A, 2B, 2C)
- the robot arm 3 to which the medical instruments 2B and 2C are attached is not shown.
- the control information of the robot body 4 is input to the control means 7 by the input means 6 provided with the operation panel 5.
- the control means 7 controls the robot body 4 based on the control information input from the input means 6.
- the robot body 4 selectively operates a plurality of different types of medical instruments 2, and a common input unit 6 is used for the plurality of medical instruments 2.
- Examples of the medical instrument 2 include those that sandwich a surgical site, those that cut a surgical site, and the like.
- the surgical robot 1 further includes an endoscope (not shown) for imaging the surgical site of the patient P.
- an operation panel 5 is provided in order to present an image obtained from the endoscope to the operator.
- a display 8 is installed adjacent to the display 8.
- the image on the display 8 is controlled by the control means 7, and the display means 9 in the surgical robot 1 of the present embodiment is configured by the display 8 and the control means (display control unit thereof) 7.
- the operation panel 5 includes a plurality of (three in this example) medical instruments 2 to be used.
- a selection switch (operation unit) 10 (10A, 10B, 10C) for selecting the joystick (operation unit or movable operation unit) 11 for moving the selected medical device 2, and the selected medical device 2 are provided with activation switches (operation units) 12 (12A, 12B, 12C, 12D) for performing various (four types in this example) operations.
- An activation switch 12 may be provided on the joystick 11.
- Each joint of the robot arm 3 is provided with a joint angle sensor (for example, an encoder) for detecting the joint angle.
- Information on the joint angle sensor is transmitted to the control means 7, and the control means 7 recognizes the posture of the robot arm 3 based on the transmitted information.
- each robot arm 3 to which each medical instrument 2 is mounted If the relative positional relationship between each robot arm 3 to which each medical instrument 2 is mounted is known, the posture of each robot arm 3 is recognized as described above, so that each medical instrument 2 and endoscope The control means 7 can recognize the relative positional relationship.
- the medical instruments 2A, 2B, and 2C on the screen are the selection switches 10A,
- the control means 7 can recognize which of 10B and 10C corresponds to.
- the joystick 11 and the start switch 12 are each provided with a contact / proximity sensor (operated state detection means) 13.
- a contact / proximity sensor various sensors such as an electric sensor such as a capacitance type can be used in addition to a mechanical sensor such as a switch.
- the detection signal of the contact / proximity sensor 13 is transmitted to the control means 7, whereby the operation units 10, 11, 12 to be operated can be specified.
- FIG. 3 shows a display example of the display 8.
- the display means 9 has a selection status display function for displaying the selection status for the plurality of medical instruments 2 on the screen of the display 8.
- the display unit 9 also has a function of displaying the moving direction and function of the medical instrument 2 on the screen of the display 8.
- the selection switch 10 ⁇ / b> B of the operation panel 5 is pressed to select the medical instrument 2 ⁇ / b> B.
- the selected medical instrument 2 ⁇ / b> B has a star (mark) on the screen of the display 8. ) 14 is displayed.
- the operator can easily recognize the currently selected medical instrument 2B without taking his eyes off the display 8. Can do.
- the mark 14 is displayed on the screen of the display 8 so as to be at least partially overlapped with the selected medical device 2B. Accordingly, the selected medical instrument 2B can be easily recognized, and the mark 14 does not block the field of view, and the image area of the display 8 can be used efficiently.
- the mark 14 indicating the selected medical device 2B can be always displayed on the display 8. However, after the mark 14 is displayed once, the mark 14 is displayed after a predetermined time (for example, 1 second). It may be erased. Thereby, the image area of the display 8 can be used more efficiently.
- a predetermined time for example, 1 second
- the selected medical instrument 2B may be displayed on the screen of the display 8 by characters (for example, characters such as “electrosurgical instrument”). it can.
- the mark 14 may be a mark such as an asterisk as shown in this example, or an arrow pointing to the medical device 2B.
- the selected medical device 2B and the other medical devices 2A and 2C are identified. It is enough to display as much as possible.
- a mark 14 is attached to each medical device 2.
- the display means 9 has a function of invalidating the selection status display function. Depending on the contents of the operation to be performed and the type of medical instrument 2 used, it may not always be necessary to display the selection status of the medical instrument 2 on the display 8. In such a case, the display function of the display 8 can be effectively utilized by preventing unnecessary display on the display 8.
- the display means 9 also displays an operation content display for displaying the operation content of the medical instrument 2 corresponding to the operation units 11 and 12 in which the operated state is detected by the contact / proximity sensor 13 provided on the joystick 11 and the activation switch 12. It has a function.
- the screen of the display 8 on the left side of FIG. 4 operates adjacent to the selected medical instrument 2B when the operator holds the joystick 11 with the selection switch 10B pressed and the medical instrument 2B selected.
- a mark 15 associated with the contents is displayed.
- the screen of the display 8 on the right side of FIG. 4 shows the operation content (this is adjacent to the selected medical instrument 2B when the operator touches the activation switch 12D in the state where the medical instrument 2B is selected).
- a mark 15 reminiscent of energization of the electrosurgical instrument is displayed.
- the mark 15 associated with the operation content can be displayed on the screen of the display 8 so as to be at least partially overlapped with the medical device 2. Thereby, the operator can easily recognize the operation content of the medical instrument 2 and can efficiently use the image area of the display 8 without the mark 15 blocking the view.
- the operation content can be displayed on the screen of the display 8 by characters (for example, “energized”) 16.
- the mark 15 and the character 16 indicating the operation content of the medical instrument 2 can be displayed on the display 8 at all times. However, after the mark 15 and the character 16 are displayed, a predetermined time has elapsed (for example, one second later). ), The mark 15 and the character 16 may be deleted. Thereby, the image area of the display 8 can be used more efficiently.
- the display means 8 has a function of invalidating the operation content display function.
- the operation contents of the medical instrument 2 may not necessarily be displayed on the display 8.
- the display function of the display 8 can be effectively utilized by preventing unnecessary display on the display 8.
- the screen of the display 8 on the left side of FIG. 5 operates adjacent to the selected medical instrument 2A when the operator holds the joystick 11 with the selection switch 10A pressed and the medical instrument 2A selected.
- a mark 15 associated with the contents is displayed.
- the screen of the display 8 on the right side of FIG. 5 shows the operation contents adjacent to the selected medical instrument 2A when the operator touches the activation switch 12D while the medical instrument 2A is selected (this operation In this case, a mark 15 pronounced of a forceps closing operation) is displayed.
- different medical instruments for example, medical instruments 2A and 2B
- a common activation switch for example, the activation switch 12D
- the number of start switches 12 can be reduced.
- the operation content is displayed on the screen of the display 8 according to the selected medical device 2, even when operating different medical devices 2 with the common activation switch 12, the operator can operate the operation content. Can be easily recognized.
- the operation unit such as the start switch 12 has a first operation state and a second operation state in which the operation further proceeds from the first operation state.
- the operation content display function can display the operation content of the medical instrument 2 in the first operation state.
- the operation unit such as the start switch 12 is configured by a push button switch
- the first operation state is a half-press state of the push button switch
- the second operation state is the half-press of the push button switch. It is a state where it is pushed further from the state.
- the operation unit for example, a push button type switch
- the second operation state a state where the operation unit is further pressed from the half-pressed state
- the corresponding medical instrument 2 performs a predetermined operation (for example, electrosurgical operation). Power to the appliance).
- voice guidance can be used in combination with the display of the marks 14 and 15 and the characters 16 by the display means 9.
- the operation units 10, 11, and 12 may be a multi-degree-of-freedom passive arm, a grip for detecting the grip amount, or the like.
- the display means 9 further has a switch display function for displaying various switches other than the joystick 11 on the display 8, and the pointer (cursor) moves on the display 8.
- the switch may be operated by clicking.
- the pointer 17 displayed on the display 8 is moved with the joystick 11, and the pointer 17 is moved to a desired switch position on the sub-screen 18 also displayed on the display 8.
- the sub-screen 18 constitutes a selection switch for selecting various medical instruments 2A, 2B, and 2C.
- the star mark (mark) 14 is displayed on the selected medical instrument 2 ⁇ / b> B, so that the operator looks away from the currently selected medical instrument 2 ⁇ / b> B from the display 8. And can be easily recognized.
- operation itself for selecting the desired medical instrument 2 can also be performed without keeping an eye on the display 8. Further, the selection switches 10A, 10B, and 10C on the operation panel 5 can be omitted.
- operation button 19 provided at the tip of the joystick 11 may be used as an activation switch for activating the selected medical instrument 2B.
- the operator can activate the desired medical instrument 2B without taking his eyes off the display 8. Further, the start switches 12A, 12B, 12C, and 12D of the operation panel 5 can be omitted.
- FIG. 7 shows still another modified example.
- the pointer 17 is positioned on the switch of the sub-screen 18 displayed on the display 8, the medical instrument 2 related to the switch is clearly shown. It has come to be.
- magnification ratio is a magnification of the operation amount of the medical instrument 2 or the like with respect to the operation amount of the joystick (operation unit) 11.
- FIG. 8 shows still another modified example.
- a plurality of input means (console) 6 are installed for one surgical robot 1.
- three input means 6A, 6B, 6C are installed.
- FIG. 8 shows an example in which the display 8 and the control means 7 are provided for each medical instrument 2, a common display or common control means may be used.
- magnification described above may be the reciprocal of the display magnification of the display 8.
- the operation amount of the medical instrument 2 on the display 8 with respect to a certain operation amount of the joystick (operation unit) 11 is made constant regardless of the display magnification, thereby enabling an intuitive operation. To do.
- the relationship between the movable range of the joystick (operation unit) 11 and the display range of the display 8 is also constant, and it becomes easy to set the movable range or the display range according to the movable range according to the display range. Therefore, this point is also advantageous.
- the correspondence between the selected medical instrument 2 and the operation parts 11 and 12 of the input unit 6 and the operation contents of the medical instrument 2 is selected. Is displayed on the screen of the display 8, so that the operator can select which medical instrument 2 is selected through the screen of the display 8, that is, without diverting the line of sight from the image of the surgical site. It is possible to easily determine which operation unit 11, 12 of the input unit 6 corresponds to which operation of the selected medical instrument 2.
- the configuration of the present invention is not necessarily indispensable when the correspondence between the operation units 11 and 12 and the medical device 2 can be determined by a configuration or method other than the present invention.
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Robotics (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
- Otolaryngology (AREA)
- Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
Abstract
Description
2、2A、2B、2C 医療器具
3 ロボットアーム
4 ロボット本体
5 操作盤
6、6A、6B、6C 入力手段
7 制御手段
8、8A、8B、8C ディスプレイ
9 表示手段
10(10A、10B、10C) 選択スイッチ(操作部)
11 ジョイスティック(操作部または可動操作部)
12(12A、12B、12C、12D) 起動スイッチ(操作部)
13 接触/近接センサ(被操作状態検出手段)
14、15 マーク
16 文字
17 ポインタ
18 子画面
19 操作ボタン
P 患者
Claims (16)
- 複数の医療器具を選択的に操作するロボット本体と、
前記ロボット本体の制御情報を入力するための、前記複数の医療器具について共通の入力手段と、
患者の手術部位の映像を表示するための表示手段であって、前記複数の医療器具についての選択状況を表示する選択状況表示機能を有する、表示手段と、を備えた手術ロボット。 - 前記選択状況表示機能は、選択されている前記医療器具を特定するためのマークおよび/または文字を前記表示手段の画面上に表示するものである、請求項1記載の手術ロボット。
- 前記マークおよび/または文字は、少なくとも部分的に前記医療器具に重ねて表示される、請求項2記載の手術ロボット。
- 前記選択状況表示機能は、前記表示手段の画面上に前記複数の医療器具についての選択状況を表示した後、所定時間経過後に前記選択状況の表示を消すものである、請求項1乃至3のいずれか一項に記載の手術ロボット。
- 前記表示手段は、前記選択状況表示機能を無効化する機能を有する、請求項1乃至4のいずれか一項に記載の手術ロボット。
- 前記入力手段は、前記医療器具の複数の動作内容に対応する複数の操作部を有し、
前記複数の操作部には、各操作部の被操作状態を検出するための被操作状態検出手段が設けられており、
前記表示手段は、前記被操作状態検出手段により前記被操作状態が検出された前記操作部に対応する前記医療器具の動作内容を表示する動作内容表示機能を有する、請求項1乃至5のいずれか一項に記載の手術ロボット。 - 前記動作内容表示機能は、前記動作内容を連想させるマークを表示するものである、請求項6記載の手術ロボット。
- 前記動作内容を連想させるマークは、少なくとも部分的に前記医療器具に重ねて表示される、請求項7記載の手術ロボット。
- 前記動作内容表示機能は、前記表示手段の画面上に前記動作内容を表示した後、所定時間経過後に前記動作内容の表示を消すものである、請求項6乃至8のいずれか一項に記載の手術ロボット。
- 前記表示手段は、前記動作内容表示機能を無効化する機能を有する、請求項6乃至9のいずれか一項に記載の手術ロボット。
- 前記被操作状態検出手段は、接触および/または近接センサである、請求項6乃至10のいずれか一項に記載の手術ロボット。
- 前記操作部は、第一操作状態と、前記第一操作状態から更に操作が進行した第二操作状態とを有し、
前記動作内容表示機能は、前記第一操作状態において前記医療器具の動作内容を表示するものである、請求項6乃至11のいずれか一項に記載の手術ロボット。 - 前記操作部は、プッシュボタン式スイッチを含み、
前記第一操作状態は、前記プッシュボタン式スイッチの半押し状態であり、前記第二操作状態は、前記プッシュボタン式スイッチを前記半押し状態から更に押し込んだ状態である、請求項12記載の手術ロボット。 - 前記表示手段は、各種スイッチを表示するスイッチ表示機能をさらに有し、
前記入力手段は、前記各種スイッチのうちの所望のスイッチを作動させるための操作部を有する、請求項1乃至13のいずれか一項に記載の手術ロボット。 - 前記入力手段を複数備え、前記表示手段は、複数の前記入力手段のそれぞれに対応する複数のディスプレイを備えている、請求項1乃至14のいずれか一項に記載の手術ロボット。
- 前記入力手段は、前記複数の医療器具の少なくとも1つを移動させるための可動操作部を有し、
前記表示手段は、前記可動操作部の動作量に対する前記医療器具の動作量の倍率を、前記医療器具の表示倍率の逆数とする、請求項1乃至15のいずれか一項に記載の手術ロボット。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020157018184A KR101740168B1 (ko) | 2012-12-25 | 2013-12-25 | 수술 로봇 |
| JP2014554490A JP6321550B2 (ja) | 2012-12-25 | 2013-12-25 | 手術ロボット |
| EP13868654.8A EP2939632B1 (en) | 2012-12-25 | 2013-12-25 | Surgical robot |
| US14/655,443 US10932871B2 (en) | 2012-12-25 | 2013-12-25 | Surgical robot |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012281613 | 2012-12-25 | ||
| JP2012-281613 | 2012-12-25 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014104088A1 true WO2014104088A1 (ja) | 2014-07-03 |
Family
ID=51021166
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/084647 Ceased WO2014104088A1 (ja) | 2012-12-25 | 2013-12-25 | 手術ロボット |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10932871B2 (ja) |
| EP (1) | EP2939632B1 (ja) |
| JP (1) | JP6321550B2 (ja) |
| KR (1) | KR101740168B1 (ja) |
| WO (1) | WO2014104088A1 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018508300A (ja) * | 2015-03-17 | 2018-03-29 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 遠隔操作医療システムにおける器具の画面上での識別をレンダリングするためのシステム及び方法 |
| JP2018508301A (ja) * | 2015-03-17 | 2018-03-29 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 遠隔操作医療システムにおける器具の画面上での識別のためのシステム及び方法 |
| JP2018534975A (ja) * | 2015-10-09 | 2018-11-29 | コヴィディエン リミテッド パートナーシップ | ロボット外科用システムを用いて体腔を可視化するための角度付き内視鏡の使用方法 |
| WO2018225121A1 (ja) * | 2017-06-05 | 2018-12-13 | オリンパス株式会社 | 医療システムおよび医療システムの作動方法 |
| JP2019528091A (ja) * | 2016-07-14 | 2019-10-10 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 遠隔操作医療システムにおけるオンスクリーンメニューのためのシステム及び方法 |
| US20200093552A1 (en) * | 2018-09-25 | 2020-03-26 | Medicaroid Corporation | Surgical system and method of displaying information in the same |
| JP2021534919A (ja) * | 2018-09-05 | 2021-12-16 | ニューヴェイジヴ,インコーポレイテッド | 脊椎外科的処置のためのシステム及び方法 |
| JP2024503072A (ja) * | 2021-01-14 | 2024-01-24 | コリンダス、インコーポレイテッド | 複数の細長い医療デバイスを用いたロボットインターベンション処置の制御ステーションのためのシステム及び方法 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11209954B2 (en) * | 2015-12-10 | 2021-12-28 | Cmr Surgical Limited | Surgical robotic system using dynamically generated icons to represent orientations of instruments |
| GB201703878D0 (en) * | 2017-03-10 | 2017-04-26 | Cambridge Medical Robotics Ltd | Control system |
| JP7145851B2 (ja) * | 2017-06-13 | 2022-10-03 | 川崎重工業株式会社 | 作業システム |
| EP4397272A3 (en) * | 2017-07-13 | 2024-09-25 | Intuitive Surgical Operations, Inc. | Systems and methods for switching control between multiple instrument arms |
| WO2019032450A1 (en) * | 2017-08-08 | 2019-02-14 | Intuitive Surgical Operations, Inc. | SYSTEMS AND METHODS FOR RENDERING ALERTS ON A SCREEN OF A TELEOPERATION SYSTEM |
| US20230169698A1 (en) * | 2020-04-24 | 2023-06-01 | Ohm Savanayana | Microscope system and corresponding system, method and computer program for a microscope system |
| CN111631813B (zh) * | 2020-05-27 | 2021-08-17 | 武汉联影智融医疗科技有限公司 | 植入性电极自动排序方法、排序系统、设备及计算机可读存储介质 |
| EP3989236A1 (en) * | 2020-10-23 | 2022-04-27 | Leica Instruments (Singapore) Pte. Ltd. | System for a microscope system and corresponding method and computer program |
| KR102549114B1 (ko) * | 2021-08-02 | 2023-06-29 | 주식회사 로엔서지컬 | 원격 수술용 엔드 이펙터의 이동 거리 조절 장치 및 그 방법 |
| WO2025099593A1 (en) * | 2023-11-06 | 2025-05-15 | Auris Health, Inc. | Enhanced visibility of robot while surgeon immersed in viewer |
| WO2026036311A1 (zh) * | 2024-08-15 | 2026-02-19 | 乐博智励医疗私人有限公司 | 一种用于手术辅助系统的控制方法及相关装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05337118A (ja) * | 1992-06-04 | 1993-12-21 | Olympus Optical Co Ltd | スコープ保持装置 |
| JPH08280709A (ja) * | 1995-04-18 | 1996-10-29 | Olympus Optical Co Ltd | 手術用表示装置 |
| JP2001104333A (ja) | 1999-10-07 | 2001-04-17 | Hitachi Ltd | 手術支援装置 |
| JP2002253574A (ja) * | 2001-03-01 | 2002-09-10 | Hitachi Ltd | 手術支援装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4044255B2 (ja) * | 1999-10-14 | 2008-02-06 | 富士通株式会社 | 情報処理装置、及び画面表示方法 |
| US8082575B2 (en) * | 2002-03-28 | 2011-12-20 | Rampart-Id Systems, Inc. | System, method and apparatus for enabling transactions using a user enabled programmable magnetic stripe |
| JP2005267457A (ja) * | 2004-03-19 | 2005-09-29 | Casio Comput Co Ltd | 画像処理装置、撮影装置、画像処理方法及びプログラム |
| US9789608B2 (en) * | 2006-06-29 | 2017-10-17 | Intuitive Surgical Operations, Inc. | Synthetic representation of a surgical robot |
| WO2007137304A2 (en) | 2006-05-19 | 2007-11-29 | Ethicon Endo-Surgery, Inc. | Electrical surgical instrument |
| EP2142132B1 (en) | 2007-04-16 | 2012-09-26 | NeuroArm Surgical, Ltd. | System for non-mechanically restricting and/or programming movement of a tool of a manipulator along a single axis |
| US8864652B2 (en) * | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| US8657841B2 (en) * | 2008-12-16 | 2014-02-25 | Nico Corporation | Tissue removal device for neurosurgical and spinal surgery applications |
| US8120301B2 (en) * | 2009-03-09 | 2012-02-21 | Intuitive Surgical Operations, Inc. | Ergonomic surgeon control console in robotic surgical systems |
| US8418073B2 (en) | 2009-03-09 | 2013-04-09 | Intuitive Surgical Operations, Inc. | User interfaces for electrosurgical tools in robotic surgical systems |
| CN107510506A (zh) * | 2009-03-24 | 2017-12-26 | 伊顿株式会社 | 利用增强现实技术的手术机器人系统及其控制方法 |
| WO2011116332A2 (en) * | 2010-03-18 | 2011-09-22 | SPI Surgical, Inc. | Surgical cockpit comprising multisensory and multimodal interfaces for robotic surgery and methods related thereto |
| US9123155B2 (en) * | 2011-08-09 | 2015-09-01 | Covidien Lp | Apparatus and method for using augmented reality vision system in surgical procedures |
| US9524286B2 (en) * | 2012-12-04 | 2016-12-20 | Oracle International Corporation | Persistent layer labels for a pivot table or cross-tabular report |
-
2013
- 2013-12-25 EP EP13868654.8A patent/EP2939632B1/en active Active
- 2013-12-25 US US14/655,443 patent/US10932871B2/en active Active
- 2013-12-25 KR KR1020157018184A patent/KR101740168B1/ko active Active
- 2013-12-25 WO PCT/JP2013/084647 patent/WO2014104088A1/ja not_active Ceased
- 2013-12-25 JP JP2014554490A patent/JP6321550B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05337118A (ja) * | 1992-06-04 | 1993-12-21 | Olympus Optical Co Ltd | スコープ保持装置 |
| JPH08280709A (ja) * | 1995-04-18 | 1996-10-29 | Olympus Optical Co Ltd | 手術用表示装置 |
| JP2001104333A (ja) | 1999-10-07 | 2001-04-17 | Hitachi Ltd | 手術支援装置 |
| JP2002253574A (ja) * | 2001-03-01 | 2002-09-10 | Hitachi Ltd | 手術支援装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2939632A4 |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018508301A (ja) * | 2015-03-17 | 2018-03-29 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 遠隔操作医療システムにおける器具の画面上での識別のためのシステム及び方法 |
| US12251184B2 (en) | 2015-03-17 | 2025-03-18 | Intuitive Surgical Operations, Inc. | Systems and methods for onscreen identification of instruments in a teleoperational medical system |
| US11872006B2 (en) | 2015-03-17 | 2024-01-16 | Intuitive Surgical Operations, Inc. | Systems and methods for onscreen identification of instruments in a teleoperational medical system |
| JP2018508300A (ja) * | 2015-03-17 | 2018-03-29 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 遠隔操作医療システムにおける器具の画面上での識別をレンダリングするためのシステム及び方法 |
| US10660716B2 (en) | 2015-03-17 | 2020-05-26 | Intuitive Surgical Operations, Inc. | Systems and methods for rendering onscreen identification of instruments in a teleoperational medical system |
| US10905506B2 (en) | 2015-03-17 | 2021-02-02 | Intuitive Surgical Operations, Inc | Systems and methods for rendering onscreen identification of instruments in a teleoperational medical system |
| US11123149B2 (en) | 2015-10-09 | 2021-09-21 | Covidien Lp | Methods of using an angled endoscope for visualizing a body cavity with robotic surgical systems |
| JP2018534975A (ja) * | 2015-10-09 | 2018-11-29 | コヴィディエン リミテッド パートナーシップ | ロボット外科用システムを用いて体腔を可視化するための角度付き内視鏡の使用方法 |
| US11337768B2 (en) | 2016-07-14 | 2022-05-24 | Intuitive Surgical Operations, Inc. | Systems and methods for onscreen menus in a teleoperational medical system |
| JP2019528091A (ja) * | 2016-07-14 | 2019-10-10 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 遠隔操作医療システムにおけるオンスクリーンメニューのためのシステム及び方法 |
| US11819301B2 (en) | 2016-07-14 | 2023-11-21 | Intuitive Surgical Operations, Inc. | Systems and methods for onscreen menus in a teleoperational medical system |
| JP2023101524A (ja) * | 2016-07-14 | 2023-07-21 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 遠隔操作医療システムにおけるオンスクリーンメニューのためのシステム及び方法 |
| US11471230B2 (en) | 2017-06-05 | 2022-10-18 | Olympus Corporation | Medical system and medical system operation method |
| WO2018225121A1 (ja) * | 2017-06-05 | 2018-12-13 | オリンパス株式会社 | 医療システムおよび医療システムの作動方法 |
| JP2023115016A (ja) * | 2018-09-05 | 2023-08-18 | ニューヴェイジヴ,インコーポレイテッド | 脊椎外科的処置のためのシステム及び方法 |
| JP2021534919A (ja) * | 2018-09-05 | 2021-12-16 | ニューヴェイジヴ,インコーポレイテッド | 脊椎外科的処置のためのシステム及び方法 |
| US12201381B2 (en) | 2018-09-05 | 2025-01-21 | Globus Medical Inc. | Systems and methods for spinal surgical procedures |
| JP7679602B2 (ja) | 2018-09-05 | 2025-05-20 | ニューヴェイジヴ,インコーポレイテッド | 脊椎外科的処置のためのシステム及び方法 |
| US20200093552A1 (en) * | 2018-09-25 | 2020-03-26 | Medicaroid Corporation | Surgical system and method of displaying information in the same |
| JP2024503072A (ja) * | 2021-01-14 | 2024-01-24 | コリンダス、インコーポレイテッド | 複数の細長い医療デバイスを用いたロボットインターベンション処置の制御ステーションのためのシステム及び方法 |
| JP7690590B2 (ja) | 2021-01-14 | 2025-06-10 | シーメンス ヘルシニアーズ エンドバスキュラー ロボティクス インコーポレイテッド | 複数の細長い医療デバイスを用いたロボットインターベンション処置の制御ステーションのためのシステム及び方法 |
| US12472023B2 (en) | 2021-01-14 | 2025-11-18 | Siemens Healthineers Endovascular Robotics Inc. | Systems and methods for a control station for robotic interventional procedures using a plurality of elongated medical devices |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2939632A1 (en) | 2015-11-04 |
| US20150351864A1 (en) | 2015-12-10 |
| KR20150093787A (ko) | 2015-08-18 |
| JPWO2014104088A1 (ja) | 2017-01-12 |
| JP6321550B2 (ja) | 2018-05-09 |
| KR101740168B1 (ko) | 2017-05-25 |
| US10932871B2 (en) | 2021-03-02 |
| EP2939632A4 (en) | 2016-08-10 |
| EP2939632B1 (en) | 2021-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6321550B2 (ja) | 手術ロボット | |
| US20220151716A1 (en) | Association processes and related systems for manipulators | |
| JP7080861B2 (ja) | 手術システム | |
| US10064693B2 (en) | Controlling a surgical navigation system | |
| JP6839085B2 (ja) | ロボットシステム | |
| CN103648426B (zh) | 手术支持装置 | |
| CN104461345B (zh) | 用于控制医疗设备的运动的方法、控制装置以及医疗设备 | |
| JP6203249B2 (ja) | マスタスレーブシステム | |
| KR20170084186A (ko) | 사용자 인터페이스와 마스터 제어기 사이의 상호작용 | |
| CN106456261B (zh) | 手术用机械手操作装置和手术用机械手系统 | |
| JP2023010761A (ja) | カメラ制御装置 | |
| JP6138262B2 (ja) | 医療機器 | |
| JP2015080848A (ja) | マニピュレータシステムの制御方法およびマニピュレータシステム | |
| US20160135670A1 (en) | Apparatus for providing imaging support during a surgical intervention | |
| JP6120948B2 (ja) | マスタスレーブシステム | |
| CN105103086B (zh) | 具有自动校准的手势控制 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13868654 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2013868654 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2014554490 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14655443 Country of ref document: US |
|
| ENP | Entry into the national phase |
Ref document number: 20157018184 Country of ref document: KR Kind code of ref document: A |