WO2015019477A1 - Système de rééducation et procédé de commande correspondant - Google Patents
Système de rééducation et procédé de commande correspondant Download PDFInfo
- Publication number
- WO2015019477A1 WO2015019477A1 PCT/JP2013/071570 JP2013071570W WO2015019477A1 WO 2015019477 A1 WO2015019477 A1 WO 2015019477A1 JP 2013071570 W JP2013071570 W JP 2013071570W WO 2015019477 A1 WO2015019477 A1 WO 2015019477A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- training
- subject
- rehabilitation
- menu
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/112—Gait analysis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/316—Modalities, i.e. specific diagnostic methods
- A61B5/389—Electromyography [EMG]
- A61B5/395—Details of stimulation, e.g. nerve stimulation to elicit EMG response
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2505/00—Evaluating, monitoring or diagnosing in the context of a particular type of medical care
- A61B2505/09—Rehabilitation or training
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0015—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system
- A61B5/0024—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system for multiple sensor units attached to the patient, e.g. using a body or personal area network
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/1036—Measuring load distribution, e.g. podologic studies
- A61B5/1038—Measuring plantar pressure during gait
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1071—Measuring physical dimensions, e.g. size of the entire body or parts thereof measuring angles, e.g. using goniometers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1113—Local tracking of patients, e.g. in a hospital or private home
- A61B5/1114—Tracking parts of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1118—Determining activity level
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/22—Ergometry; Measuring muscular strength or the force of a muscular blow
- A61B5/224—Measuring muscular strength
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4528—Joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/48—Other medical applications
- A61B5/486—Biofeedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/024—Knee
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/0244—Hip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5002—Means for controlling a set of similar massage devices acting in sequence at different locations on a patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5061—Force sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5069—Angle sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5084—Acceleration sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5097—Control means thereof wireless
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
Definitions
- the present invention relates to a rehabilitation system and a control method thereof, and more particularly, to a wearable power assist system and a control method thereof for performing rehabilitation by attaching a sensor or device to a person.
- rehabilitation includes acute or convalescent rehabilitation that hospitalized patients receive in hospitals and life stage rehabilitation (maintenance rehabilitation) that continues after discharge.
- Various devices and systems have been proposed according to rehabilitation in each period.
- Patent Document 1 proposes a walking assist system for patients with osteoarthritis.
- a walking assist device having a drive unit and a link mechanism is attached to both feet of a patient, a walking pattern is generated based on a change in the pressure of the sole detected by the foot sensor of the patient, and the walking is performed.
- Walking assistance is provided by controlling the drive unit of the walking assistance device according to the pattern.
- Patent Document 1 discloses a system that recommends a training protocol to a patient remotely, advances training, and monitors the patient's training state to adjust the protocol.
- Patent Document 1 corrects a walking pattern in accordance with an operation instruction from a user who is a doctor, and assists or corrects walking of a patient with a walking assist device based on the walking pattern.
- Patent Document 2 discloses a system that remotely supports a patient by providing a rehabilitation protocol recommendation or a modified protocol to the patient, but suggests that the training content is updated to the optimal training content in real time according to the training effect. There is no.
- An object of the present invention is to allow a subject to perform rehabilitation training based on a training menu and update the training menu based on the body movement of the subject to continuously perform rehabilitation training.
- the present invention also provides rehabilitation training by attaching a sensor that detects muscle movement and physical condition information to the subject's body, and stimulates the muscle part that inhibits the body movement to ensure proper use of the muscle. It is possible to instruct.
- Another object of the present invention is to make it possible to visualize and confirm the movement of a subject who performs training.
- the rehabilitation system according to the present invention is preferably an input terminal that can be operated by a subject who performs rehabilitation training, A display terminal for displaying information on rehabilitation training for the subject; A sensor that is attached to the body of the subject and detects the movement of muscles of the body; A storage unit for storing a training menu in which the content of training is determined in advance for each target person; The training menu for each target person is output from the storage unit, displayed on the display terminal used by the target person, and the data measured by the sensor is the value determined in advance in the training menu.
- An analysis system unit for the target person for judging whether or not The subject analysis system unit is Further, when it is determined that the data measured by the sensor is insufficient with respect to a value predetermined in the training menu, the training menu is changed, and the changed training menu is stored in the storage unit, And the training menu after this change is displayed on this display terminal, and it is comprised as a rehabilitation system characterized by performing rehabilitation training based on the training menu after this change.
- the rehabilitation system according to the present invention is also preferably an input terminal that can be operated by a subject who performs rehabilitation training, A display terminal for displaying information on rehabilitation training for the subject; A sensor that is attached to the body of the subject and detects the movement of the muscles of the body; a feedback device that provides a stimulus to the body part of the subject; A storage unit for storing a training menu in which the content of training is determined in advance for each target person; From the storage unit, the training menu for each subject is output and displayed on the display terminal used by the subject. And when it is judged that the data measured by the sensor is insufficient with respect to a predetermined value in the training menu, an analysis system unit for a target person that activates the feedback device, It is comprised as a rehabilitation system characterized by having.
- the rehabilitation control method according to the present invention is preferably configured as a rehabilitation control method in the rehabilitation system.
- the present invention or, preferably, a rehabilitation training wearing device to be worn by a subject of rehabilitation training, A plurality of sensors for detecting the joint angle and muscle movement of the subject's body; A sensor for detecting physical condition information of the subject; A feedback device that emits a signal that stimulates the muscle portion of the subject that is estimated to be a factor that hinders the goal of rehabilitation training; It is configured as a rehabilitation training wearing device in which a wireless unit that transmits a signal detected by the sensor to the outside and transmits a signal transmitted from the outside to the feedback device is arranged.
- ADVANTAGE OF THE INVENTION it becomes possible to make a subject perform rehabilitation training based on a training menu, update a training menu based on a body motion of a subject, and perform rehabilitation training continuously.
- a sensor that detects muscle movement and physical condition information is attached to the subject's body and rehabilitation training is performed, and stimulation is given to the muscle portion that inhibits the movement of the body to instruct the proper use of the muscle. Is possible.
- FIG. 1 shows the configuration of a rehabilitation training system according to the first embodiment.
- the rehabilitation training system is configured by connecting information processing apparatuses at each base of a hospital 2, a day care center rehabilitation facility 3, and a plurality of patient homes 4 to a data center 1 via a network.
- the data center 1 is constructed by one or a plurality of servers, and includes a patient analysis system 11, a facility analysis system 12, a doctor analysis system 14, a PHR (Personal Health Record) 13, and a database (abbreviated as DB). 15.
- the patient analysis system 11, the facility analysis system 12, and the doctor analysis system 14 execute their specific application programs on a server to realize their functions.
- the PHR 13 is a record corresponding to the patient's individual electronic medical record, and is stored in the DB 13.
- the DB 15 stores various information necessary for rehabilitation training including the PHR 13.
- An information processing apparatus such as an input terminal 43 and a display terminal 44 and a wireless unit 45 are installed in the patient house 4.
- the patient P1 wears the sensing wear 42 and performs rehabilitation training according to the guidance displayed on the display terminal 44.
- the sensing wear 42 is provided with a plurality of sensors 422, a feedback (FB) device 423, and a wireless unit 421 for transmitting and receiving data to and from the wireless unit 45.
- the plurality of sensors 422 detect and measure rehabilitation motion information related to movement of joint angles of each joint, muscle activity information related to surface myoelectric potential and muscle hardness, and physical condition information such as body temperature, pulse, blood pressure, and the like in real time. .
- the configuration of the sensing wear 42 will be described later with reference to FIG.
- the FB device 423 is a device that stimulates a portion of a patient's muscle that is estimated to be a factor that hinders a training target by vibration, pressure contact, or the like, and is activated in response to an instruction from the patient analysis system 11.
- the sensing wear 42 is called in this way because it is equipped with various sensors, but it may be simply called training wear.
- the patient analysis system 11 corresponds to an external device (or simply external) when viewed from the sensing wear 42.
- the patient P1 can input a message or the like to the doctor during training by using the input terminal 43. Information input from the input terminal 43 is recorded in the PHR 13.
- the patient analysis system 11 compares the sensor measurement values (muscle movement and physical condition information) of the sensing wear 42 with the target training information recorded in the PHR 13 for each patient, and changes the training as necessary.
- the information regarding the comparison result and the training change is transmitted to the display terminal 44 of the patient house 4 and displayed.
- a signal for stimulating the patient's muscle portion may be called a warning signal
- the data is transmitted to the feedback device 423 through the wireless unit 45 and the wireless unit 421 of the sensing wear 42.
- the feedback device 423 gives a stimulus to the patient's muscles based on the received warning signal to call attention.
- All the information processed by the patient analysis system 11 (including information input from the patient terminal input terminal 43) is recorded in the PHR 13.
- the PHR 13 is connected to the doctor analysis system 14, the facility analysis system 12, and the DB 15, and the information recorded in the PHR 13 is anonymized and stored in the DB 15.
- the doctor analysis system 14 creates the doctor general information including the message input from the input terminal 43 by the patient P1 after the training based on the training information recorded in the PHR 13.
- the created doctor general information is temporarily stored in the DB 15.
- the doctor P3 of the hospital 2 can instruct from the input terminal 24, access the DB 15, read the doctor general information, and display it on the display terminal 23. Based on this information, the doctor P3 can input the training content of the next day from the input terminal 24 to the doctor analysis system 14.
- the training content consists of several types of training menus, and the training menus are composed of training patterns.
- the training menu and training pattern will be described later with reference to FIGS.
- the training menu refers to a series of training operations such as “shoulder and elbow rehabilitation training” and “rehabilitation training of muscles around the shoulder joint”.
- the training pattern is a basic unit of the operation that constitutes the training menu. For example, “stretch both arms so that the right and left shoulder flexion angles and left and right elbow flexion angles are 0 degrees, 45 degrees to 90 degrees, and 0 degrees, respectively”. Or a basic unit of training operation such as “bend both arms so that the right and left shoulder flexion angles and left and right elbow flexion angles are 90 degrees, 0 degrees to 0 degrees, and 45 degrees, respectively”.
- the doctor P3 can search the DB 15 from the search terminal 22 as a reference for determining the next rehabilitation training, and can obtain information on the training content effective for the person with the same medical condition.
- the facility analysis system 12 is connected to a display terminal 32 installed in a day care center rehabilitation facility (hereinafter simply referred to as a rehabilitation facility) 3 that performs care and rehabilitation such as a day care center in the vicinity of the patient's home 4.
- the facility analysis system 12 displays physical condition information and warning information on the display terminal 32 when the physical information such as body temperature, pulse, blood pressure changes suddenly during the training of the patient P1 based on the information recorded in the PHR 13.
- the staff P2 of the rehabilitation facility 3 looks at the display information on the display terminal 32 and determines whether to “call the patient's home 4”, “directly to the patient's home 4”, or “contact the hospital 2”.
- the facility analysis system 12 analyzes not only the emergency situation during rehabilitation training, but also the training frequency, and the staff P2 of the rehabilitation facility 3 periodically contacts the patient P1 for patients who are prone to training. Then, the cause of health condition and mental condition is examined and reported to the doctor P3.
- the rehabilitation training system shown in FIG. 1 has the PHR 13 and the patient analysis system 11 in the data center 1, but these can be installed on the patient home 4 side as an alternative.
- FIG. 6 shows an example of the configuration of the sensing wear 42.
- the sensing wear 42 is worn when performing shoulder and elbow rehabilitation training.
- the sensing wear 42 may be called training wear.
- Motion sensors 4221 are arranged on the left and right upper arms and forearms of the sensing wear 42
- a pulse wave sensor 4222 is arranged on the left or right wrist.
- a muscle activity measuring sensor 4224 is disposed in a portion corresponding to the upper arm bilateral and upper arm third muscles and a portion corresponding to the shoulder deltoid, great circular and latissimus.
- the location of the pulse wave sensor 4222 is preferably attached to a person that can be easily attached according to the paralyzed hand.
- a device that stimulates the human body with a tactile sensation such as vibration by a vibration motor using a haptic technology is used in the vicinity of the muscle activity measurement sensor 4224 (that is, a muscle region estimated to be a factor that hinders a training target) ).
- the muscle activity measurement sensor 4224 that is, a muscle region estimated to be a factor that hinders a training target.
- These motion sensor 4221, pulse wave sensor 4222, muscle activity measurement sensor 4224, and FB device 423 are connected to the wireless unit 421.
- the motion sensor 4221 includes a three-axis acceleration sensor and a three-axis gyroscope, measures the upper arm and forearm movements, and detects the joint angles of the left and right shoulder joints and elbow joints. It is desirable to fix the motion sensor 4221 to the human body from above the sensing wear 42 with a hook-and-loop belt so that the position attached during training is not displaced.
- the motion measurement can be performed by motion capture using an infrared or visible light camera or posture recognition using a distance camera without mounting the sensing wear 42 incorporating the motion sensor 4221. In this case, it is preferable to keep a large space of about 3 m in front of the camera and the patient.
- the pulse wave sensor 4222 for example, a pulse wave propagation type sphygmomanometer described in Patent Document 3 that detects a blood pressure by detecting a pulse wave can be used. With this method, the heart rate can be measured. Further, the pulse wave sensor 4222 has a built-in thermometer and can also measure the body temperature. The pulse wave sensor 4222 may be a wristwatch-type wearing device different from the sensing wear 42.
- the muscle activity sensor 4224 for example, a small myoelectric sensor described in Patent Literature 4 and Patent Literature 5 can be used.
- the amount of muscle activity depends on the amplitude of the myoelectric signal. That is, the amount of muscle activity corresponds to an envelope when full-wave rectification of the myoelectric signal is performed.
- a muscle hardness meter can also be used for the muscle activity sensor 4224. When measured with a myoelectric sensor, it depends on hardness when measured with a muscle hardness meter.
- it can also be used by directly fixing the sensor to the human body with an adhesive bandage like an electrode of an electrocardiogram.
- FIG. 9 shows a data configuration example of the training menu (TM).
- the illustrated example shows a data configuration of an upper limb rehabilitation training menu “shoulder and elbow rehabilitation training” including two training patterns TP1 and TP2. This training menu is recorded in the order of TP1, TP2.
- Each training pattern TP includes a TP number, a maximum required time for training by this training pattern, a joint angle at the start of the training pattern, a joint angle at the end of the training pattern, and data representing right and left.
- the joint angle at the start of the above training pattern is further the rotation angle of the right shoulder joint, abduction angle, horizontal bending angle, bending angle, rotation angle of the left shoulder joint, abduction angle, horizontal bending angle, bending angle, right elbow joint It consists of rotation angle, flexion angle, left elbow joint rotation angle, and flexion angle.
- the rotation angle of the right shoulder joint abduction angle, horizontal bending angle, bending angle, rotation angle of the left shoulder joint, abduction angle, horizontal bending angle, bending angle, rotation angle of the right elbow joint, It consists of a bending angle, a rotation angle of the left elbow joint, and a bending angle.
- the right further includes data on the activity status of the right greater pectoral muscle, deltoid muscle, subscapular muscle, latissimus dorsi, humerus, biceps and humerus.
- the data structure on the left is the same as that on the right.
- the information other than the joint motion angle and muscle activity information focused on in each training pattern TP is NA (Not Applicable) and is not managed.
- the muscle activity information a muscle part predicted to be active in the training menu is represented by “1”, and a muscle part predicted not to be active is represented by “0”.
- FIG. 10 is a schematic diagram showing the names of the joint angles.
- FIG. 10A shows the joint angle of the shoulder joint
- FIG. 10B shows the joint angle of the elbow joint.
- the shoulder joint can be expressed by a rotation angle, an abduction angle, a horizontal bending angle, and a bending angle
- the elbow joint can be expressed by a rotation angle and a bending angle. Most of the upper limb movements can be expressed by these angular movements of the shoulder and elbow joints.
- the overall processing flow will be outlined.
- the patient analysis system 11 displays the training content and the communication items from the doctor on the display terminal 44 (S203).
- the training menu and the target action are displayed on the display terminal 44, and the patient performs training according to the display.
- the patient analysis system 11 always measures exercise parameters including physical condition information, joint angle motion information, and muscle activity information, and displays the motion currently performed by the patient and the target motion on the display terminal 44.
- the patient analysis system 11 constantly determines the physical condition of the patient during the training, and immediately determines that the physical condition of the patient P1 has deteriorated based on the physical condition information (S208 to S242). When it is determined that the physical condition is normal, the patient analysis system 11 determines whether to continue the training without changing the target by combining the measured motion information and muscle information, or to continue the training by changing the target value. It is determined whether to continue the training by changing the information and recorded in the PHR, and an instruction is given to the display device 44 (S209 to S211). At that time, feedback is given to the FB device 423 in order to give a stimulus such as vibration to muscles related to training as necessary (S252, S253).
- the patient analysis system 11 compares the current training result with the past result, and displays the result on the display terminal 44 (S216). The arrival status and history of the final goal are displayed on the display terminal 44 (S217).
- the doctor sends to the analysis system for doctors 14 information that summarizes the reaction to the target and the results for search.
- the patient analysis system 11 further acquires the communication items to the doctor that the patient inputs from the input terminal 43, records them in the PHR 13 and then records them in the DB 15 (S219, S220), and ends the series of training.
- shoulder and elbow rehabilitation training will be described as an example. This rehabilitation training is performed while lying on its back.
- the training menu for “shoulder and elbow rehabilitation training” consists of training pattern 1 (TP1) of “stretching arms from the state of crossing hands over the chest” and “extending the elbows from the state of stretching arms” It consists of training pattern 2 (TP2), “Bringed and assembled hands on chest” and repeats 20 times with TP1 and TP2 as a set.
- the contents of each training pattern are as shown in FIG. In this training pattern, only the left and right shoulder joint flexion angles and the elbow joint flexion angles are managed.
- the patient P1 starts the rehabilitation training in accordance with the training menu displayed on the display terminal 44 by wearing the sensing wear 42 in the patient house 4 (S206).
- physical condition information is measured and physical condition determination is made as to whether it is within the reference value (S207, S208). For example, if the patient's body temperature is in the range of 36 to 37 degrees, the maximum blood pressure is in the range of 120-140 mmHg, the minimum blood pressure is in the range of 60-90 mmHg, and the pulse is between 60-100 times per minute Judge that the physical condition is normal. Although these values are standard values, the normal range of the patient's physical condition information is preset for each patient and recorded in the PHR 13.
- the patient analysis system 11 determines that the physical condition is poor, records physical condition information in the PHR 13 (S241), and displays on the display terminal 44 that the training is stopped (S242). Further, the fact that the patient's health condition is not normal is displayed on the display terminal 32 of the rehabilitation facility 3 via the facility analysis system 12. As a result of the physical condition determination, when it is determined that the physical condition is normal (S208 / Yes), the training contents and the communication items determined by the doctor P3 are displayed on the display terminal 44 (S209), and the training menu is started.
- the operation of the current training menu is first displayed as an animation on the display terminal 44, and the expected effect will be described.
- the training pattern TP1 is started.
- a plurality of sensors 422 (4221 to 4224) provided in the sensing wear 42 measure the patient's body temperature information, joint angle motion, and muscle activity information, and measure each time.
- Data is transmitted to the patient analysis system 11 via the wireless units 421 and 45. Measurement and judgment of physical condition information is given the highest priority even during training, and when it exceeds the normal range, the training is immediately stopped and notified and displayed on the display terminal 32 of the rehabilitation facility 3.
- the patient analysis system 11 animates the target training operation (target operation) according to the training pattern of the training menu and the actually measured patient motion.
- the information is displayed on the display terminal 44 (S209).
- FIG. 1 An example of a screen displayed on the display terminal 44 during training is shown in FIG.
- a person is represented by a simplified model
- the target upper limb movement is represented by a dotted line
- the measured upper limb movement is represented by a solid line.
- the patient performs rehabilitation training so that the solid line that is his / her movement overlaps the dotted line which is the target movement.
- the measured physical condition information is displayed in a scale on the lower side of the display screen.
- the joint angle judgment 1 is performed from the joint angle data of the patient's upper limbs actually measured (S210).
- the joint angle determination 1 it is determined whether the current training pattern is suitable in view of each joint motion of the patient.
- the judgment method is to estimate the target angle of each joint angle when measuring the joint angle data of the patient's upper limb by linear interpolation from the joint angle data at the start and end of the training pattern and the maximum required time. Judge by comparing with the actual measurement.
- Judgment of each joint angle is performed by comparing the ratio of the actual measurement value to the target angle of each joint operation angle with a preset threshold value. It is suitable when the ratio of the actually measured operation angle to the target operation angle is larger than the threshold value.
- the target motion angle is the absolute value obtained by subtracting the target angle at the start of the training pattern from the target angle at the time of joint angle data measurement.
- the actual operation angle is the actual angle at the start of the training pattern subtracted from the actual angle at the time of joint angle data measurement. Absolute value. As an example, FIG.
- FIG. 11 shows an example of a target angle, an actual measurement angle, a target operation angle, an actual operation angle, a ratio of the actual operation angle to the target operation angle, and a threshold value of the joint angle 2 seconds after the training pattern 1 is started.
- the threshold value since all the operations are equal to or greater than the threshold value, Yes is determined.
- the left elbow movement (0.56) is smaller than the threshold value (0.65), so it is determined No. If it is determined Yes, the measurement result is recorded in the PHR 13 (S211).
- the patient analysis system 11 determines No in the joint angle determination 1, the patient analysis system 11 performs a muscle activity determination 1 (S251).
- the muscle activity determination from the muscle activity information of the patient, it is determined from the training pattern information and the measured muscle activity information whether the muscle strength is weak and the target movement is not possible or whether the antagonistic muscle is strong and the target movement is not possible. to decide.
- the training pattern it is expected from FIG. 9 that the greater pectoral muscle, the deltoid muscle, and the triceps are active, and the latissimus dorsi, the upper arm, and the biceps are not active.
- the latissimus dorsi, humerus and biceps are not active from the actually measured muscle activity information, it is determined that the pectoralis major, triceps, and triceps are weak, that is, Yes.
- the latissimus dorsi muscle, the upper arm muscles, and the biceps brachii muscles are active, it is determined that the antagonistic muscles are engaged and the target movement is not performed, that is, No.
- joint angle determination 2 it is determined whether or not the current training pattern needs to be changed as seen from each joint motion of the patient (S213).
- the target motion angle of each joint angle at the end of the training pattern is compared with the measured motion angle, and when the measured motion angle is close to the target motion angle, Yes is set, and when it is far away, No is set.
- the ratio of the actually measured value of the joint operation angle to the target angle is compared with a preset threshold value.
- the joint angle determination 2 is Yes, the training pattern content is not changed, and the process proceeds to the training menu end determination (S214).
- the joint angle determination 2 is No, the muscle activity determination 2 is performed (S261).
- the muscle activity determination 2 it is determined whether or not the muscle activity necessary for the executed training pattern has occurred (S261). The case where the muscle activity necessary for the training pattern can be actually measured is set to Yes, and the case where the muscle activity cannot be measured is set to No. If the result of muscle activity determination 2 is Yes, the target joint angle is updated so that the numerical value of the training pattern can be easily achieved (S262).
- the renewal constant is determined in advance by the doctor depending on the recovery state of the patient, but about 0.1-0.3 is often appropriate.
- the training pattern used for estimating the target operating angle here is not the training pattern with the child number updated during training, but the training pattern set first.
- the training pattern After the training pattern is updated, it is determined whether the current training menu is completed, that is, whether the setting of TP1 and TP2 is repeated 20 times (S214). If the training menu has not ended, the next training pattern is selected and the training pattern loop is repeated (S281, S206 to S213). When the training menu is finished, it is determined whether the training content is finished (S215). If the training content has not ended, the next training menu is selected and the training menu loop is repeated (S204 to S214). When the training content is completed, the patient analysis system 11 transmits the result of the current training to the display terminal 44 and displays it.
- the muscles necessary to perform the executed training pattern are not active, and the current training menu is not valid for the current state of the patient.
- the current training menu is canceled and it is determined whether there is a next training menu (S271). If there is, the training menu is changed to (S272). If there is no next training menu, it is determined that the training content has been completed, and the current result is displayed on the display terminal 44 (S216).
- the patient's home 4 is displayed by displaying the current training result (before and after training) and the comparison result with the past result on the display terminal 44.
- the training result of this time is performed by sending data of time-series changes of each joint angle, joint angular velocity, and muscle activity information to the display terminal 23 together.
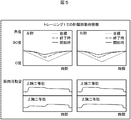
- FIG. 4 shows an example of a screen displayed on the patient terminal display terminal 44 after the training is completed.
- the past state and the state of the current training result can be compared with quantitative values such as the bending angle of the joint angle, so it is easy to grasp the slight training effect and maintain motivation for rehabilitation training. it can.
- an image in which the movement of the patient is reproduced by an instruction from the input terminal 24 is displayed.
- An example of a screen displayed on the display terminal 23 that reports to the doctor after the end of training is shown in FIG.
- the doctor reports the details of the rehabilitation training such as the joint angle during training and the time series information of the muscle activity at that time.
- a message (communication matter) from the patient to the doctor is acquired (S218), recorded in the PHR 13 for each patient (S219), and further stored in the DB 15 (S220), and a series of rehabilitation. End training.
- Example 2 describes a lower limb rehabilitation training system for correcting a gait of a patient who can walk to some extent.
- the difference between the lower limb rehabilitation training system and the upper limb habilitation training system described in Example 1 is that instead of sensing wear, which is an upper limb motion measurement system, the patient has to equip the lower limb motion measurement system with equipment It is to wear and train.
- the training state was judged by the joint angle of the shoulder joint and elbow joint and the amount of activity of the muscle that moves it, but in the lower limb motion measurement system, the joint angle of the hip joint and knee joint and the activity of the muscle that moves it. The training state is judged by the amount.
- FIG. 7 shows a configuration example of the lower limb motion measurement system.
- (A) is a configuration of the entire system
- (b) is a configuration of a joint angle measuring device
- (c) is a configuration of an insole type sole pressure measuring device for shoes.
- the lower limb motion measurement system includes a joint angle measurement device 71, a plantar pressure measurement device 72, a feedback (FB) device 73, and a muscle activity sensor.
- the muscle activity sensor is not shown because it is attached to the skin.
- the FB device 73 has the same configuration as the FB 423 shown in FIG.
- the data measured by the joint angle measuring device 71, the plantar pressure measuring device 72, and the muscle activity sensor are transmitted to the wireless unit 45 via the wireless unit 421 of the sensing wear 42 as in the first embodiment, and are analyzed for the patient. Sent to the system 11. As a result of the data processing performed by the patient analysis system 11, an instruction signal is sent to the FB device 73 via the wireless unit 45 and the wireless unit 421.
- the joint angle measuring device 71 includes two stays 714, stays 715, a single-axis angle measuring sensor 716, an inertial movement sensor unit 717, and a belt for fixing the stay 714 to the upper thigh. 718, a belt 719 for fixing the stay 715 to the lower leg, and a uniaxial slider 713.
- the stay 714 and the stay 715 have a link structure in which end portions are jointed, and a one-axis angle measurement sensor 716 is attached to the joint portion, and an inertial movement sensor unit 717 is attached to the stay 714.
- the 1-axis angle measurement sensor 716 and the inertial movement sensor unit 717 are connected to the wireless unit 421.
- the angle of the knee joint is measured by the uniaxial angle measurement sensor 716, and the angle of the hip joint is measured by the inertial movement sensor unit 717.
- a potentiometer, a rotary encoder, or the like is used as the uniaxial angle measurement sensor 716.
- the stay 714 is completely fixed to the upper leg by a belt 718, but the stay 715 is fixed to the lower leg by a belt 719 via a one-axis slider 713 so that the stay 715 can move in the longitudinal direction of the lower leg.
- the knee joint angle is not an ideal uniaxial rotary joint, and the central axis moves depending on the bending angle. Therefore, even if the central axis moves, the stay 715 moves in the longitudinal direction of the lower leg. This is because the structure allows measurement (see FIG. 8).
- the plantar pressure measuring device 72 has a structure in which a plurality of pressure sensitive sensors 722 are fixed to an insole 721 of a shoe. The position and number of the pressure sensitive sensors 722 can be changed as necessary. As shown in FIG. 7C, it is desirable to provide at least five pressure-sensitive sensors 722 because weight shift and left / right balance can be measured.
- the data measured by the plantar pressure measuring device 72 is not used for resetting or feedback of the real-time training target value, but is important information for the doctor to analyze the movement of the center of gravity during walking after training.
- the FB device 73 is fixed to the thigh and calf with an upper thigh fixing belt 718 and a lower thigh fixing belt 719.
- the human body can be stimulated by the FB device 73 of the thigh, and when it is better to increase the flexion angle of the knee joint, the human body can be stimulated by the FB device 73 of the calf.
- the FB device 73 uses a feedback device such as a vibration motor using a haptic technology that gives a stimulus to a human body by tactile sense, as in the upper limb motion measurement system of the first embodiment.
- the muscle activity sensor is fixed with a bandage at a position where, for example, the iliopsoas muscle, the gluteal muscle, the hamstring, and the quadriceps muscle can be measured.
- Data center 11 Patient analysis system 12: Facility analysis system 13: PHR (Personal Health Record) 14: Analysis system for doctors 15: DB 2: Hospital 22: Search terminal 23: Display terminal 24: Input terminal 3: Day care center rehabilitation facility 32: Display terminal 4: Patient home 42: Sensing wear 421: Wireless unit 422: Sensor 423: FB equipment 43: Input terminal 44: Display terminal 45: Wireless unit
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Physics & Mathematics (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Physiology (AREA)
- Dentistry (AREA)
- Rehabilitation Tools (AREA)
Abstract
La présente invention réalise en continu un entraînement de rééducation en faisant réaliser au sujet un entraînement de rééducation sur base d'un menu d'entraînement et en mettant à jour le menu d'entraînement sur la base des mouvements corporels du sujet. Le système de rééducation comprend : un capteur qui est installé sur le corps d'un sujet à rééduquer et qui sert à détecter les mouvements d'un muscle du corps ; une unité de mémorisation pour mémoriser les menus d'entraînement pour chaque sujet dans lequel les détails d'entraînement sont prévus au préalable ; et un unité de système d'analyse du sujet pour émettre le menu d'entraînement de chaque sujet à partir de l'unité de mémorisation et afficher celui-ci sur le terminal d'affichage utilisé par le sujet et pour déterminer si les données mesurées par le capteur sont adéquates par rapport à la valeur prévue précédemment dans le menu d'entraînement. Lorsqu'on détermine que les données mesurées par le capteur sont inadéquates par rapport à la valeur prévue préalablement dans le menu d'entraînement, l'unité de système d'analyse du sujet met à jour le menu d'entraînement, affiche le menu d'entraînement mis à jour sur le terminal d'affichage et fait réaliser au sujet l'entraînement de rééducation sur la base du menu d'entraînement mis à jour.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2013/071570 WO2015019477A1 (fr) | 2013-08-08 | 2013-08-08 | Système de rééducation et procédé de commande correspondant |
| JP2015530631A JP6242899B2 (ja) | 2013-08-08 | 2013-08-08 | リハビリシステム及びその制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2013/071570 WO2015019477A1 (fr) | 2013-08-08 | 2013-08-08 | Système de rééducation et procédé de commande correspondant |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015019477A1 true WO2015019477A1 (fr) | 2015-02-12 |
Family
ID=52460844
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/071570 Ceased WO2015019477A1 (fr) | 2013-08-08 | 2013-08-08 | Système de rééducation et procédé de commande correspondant |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6242899B2 (fr) |
| WO (1) | WO2015019477A1 (fr) |
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016154288A (ja) * | 2015-02-20 | 2016-08-25 | シャープ株式会社 | 情報処理装置、情報処理システム、情報処理方法および情報処理プログラム |
| CN106073794A (zh) * | 2016-08-23 | 2016-11-09 | 吉林大学 | 一种可穿戴的下肢康复锻炼步态监测分析设备 |
| JP2017092784A (ja) * | 2015-11-12 | 2017-05-25 | 株式会社コネクションズラボ | 口腔筋機能療法用動画配信システム |
| WO2018144874A1 (fr) * | 2017-02-05 | 2018-08-09 | Progressive Health Rehabilitation Inc. | Procédé et appareil pour mesurer la capacité d'un individu à effectuer une plage variable d'accès de barrière |
| WO2019022102A1 (fr) * | 2017-07-25 | 2019-01-31 | パナソニックIpマネジメント株式会社 | Procédé d'assistant d'activité, programme, et système d'assistant d'activité |
| JP2019024580A (ja) * | 2017-07-25 | 2019-02-21 | パナソニックIpマネジメント株式会社 | リハビリテーション支援システム、リハビリテーション支援方法及びプログラム |
| JP2019024579A (ja) * | 2017-07-25 | 2019-02-21 | パナソニックIpマネジメント株式会社 | リハビリテーション支援システム、リハビリテーション支援方法及びプログラム |
| JP2019058285A (ja) * | 2017-09-25 | 2019-04-18 | パナソニックIpマネジメント株式会社 | 活動支援方法、プログラム、及び活動支援システム |
| CN110496308A (zh) * | 2018-05-16 | 2019-11-26 | 山东蓓明医疗科技有限公司 | 可提供定制化康复训练的功能性电刺激系统及控制方法 |
| JP2020039566A (ja) * | 2018-09-10 | 2020-03-19 | 学校法人北里研究所 | リハビリ支援装置及びプログラム |
| CN111035535A (zh) * | 2019-12-19 | 2020-04-21 | 成都信息工程大学 | 一种脑卒中康复训练系统及方法 |
| CN112842824A (zh) * | 2021-02-24 | 2021-05-28 | 郑州铁路职业技术学院 | 一种用于下肢康复恢复的训练方法 |
| WO2021215207A1 (fr) * | 2020-04-22 | 2021-10-28 | コニカミノルタ株式会社 | Procédé mis en œuvre par ordinateur pour fournir des informations concernant un bénéficiaire de soins, programme et dispositif de fourniture d'informations |
| CN114795855A (zh) * | 2022-05-19 | 2022-07-29 | 重庆邮电大学 | 一种辅助腿部运动的可穿戴智能拐杖 |
| CN115588480A (zh) * | 2022-10-11 | 2023-01-10 | 武汉拓思瑞医疗科技有限公司 | 骨科术后远程康复训练方法、系统、服务器及存储介质 |
| CN116211283A (zh) * | 2023-01-30 | 2023-06-06 | 首都医科大学宣武医院 | 一种康复训练中代偿判定的方法、装置及系统 |
| JP2023099132A (ja) * | 2020-04-23 | 2023-07-11 | ロム テクノロジーズ,インコーポレイテッド | コンピュータ実装システム、及びそれを用いた方法、並びにコンピュータ可読媒体 |
| CN116440455A (zh) * | 2022-01-06 | 2023-07-18 | 深圳市奇诺动力科技有限公司 | 一种下肢康复训练设备的控制方法、设备和控制系统 |
| WO2023189649A1 (fr) * | 2022-03-30 | 2023-10-05 | ソニーグループ株式会社 | Système de traitement d'informations, programme et procédé de traitement d'informations |
| JP7373781B1 (ja) | 2022-11-30 | 2023-11-06 | アイスリーメディカル株式会社 | システム、プログラム、及び方法。 |
| WO2024029400A1 (fr) * | 2022-08-01 | 2024-02-08 | 株式会社村田製作所 | Dispositif de commande pour vibreur de dispositif de présentation haptique, et dispositif de présentation haptique |
| CN117860531A (zh) * | 2024-03-11 | 2024-04-12 | 天津市天津医院 | 一种基于肌电生物反馈的脊髓损伤康复装置 |
| WO2024125240A1 (fr) * | 2022-12-16 | 2024-06-20 | 中国科学院深圳先进技术研究院 | Procédé d'entraînement d'action et appareil d'entraînement l'utilisant |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004516058A (ja) * | 2000-12-19 | 2004-06-03 | マンドメーテル・アクチボラゲット | 運動支援装置 |
| JP2006263002A (ja) * | 2005-03-22 | 2006-10-05 | Nippon Telegr & Teleph Corp <Ntt> | 運動指導システムとその携帯通信端末 |
| JP2007526030A (ja) * | 2004-02-05 | 2007-09-13 | モトリカ インク | リハビリテーション並びにトレーニングのための方法及び器械 |
| JP2011019669A (ja) * | 2009-07-15 | 2011-02-03 | Suncall Engineering Kk | 歩行診断支援システム、歩行パターン生成装置、歩行パターン生成プログラム、及び歩行パターン生成方法 |
-
2013
- 2013-08-08 WO PCT/JP2013/071570 patent/WO2015019477A1/fr not_active Ceased
- 2013-08-08 JP JP2015530631A patent/JP6242899B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004516058A (ja) * | 2000-12-19 | 2004-06-03 | マンドメーテル・アクチボラゲット | 運動支援装置 |
| JP2007526030A (ja) * | 2004-02-05 | 2007-09-13 | モトリカ インク | リハビリテーション並びにトレーニングのための方法及び器械 |
| JP2006263002A (ja) * | 2005-03-22 | 2006-10-05 | Nippon Telegr & Teleph Corp <Ntt> | 運動指導システムとその携帯通信端末 |
| JP2011019669A (ja) * | 2009-07-15 | 2011-02-03 | Suncall Engineering Kk | 歩行診断支援システム、歩行パターン生成装置、歩行パターン生成プログラム、及び歩行パターン生成方法 |
Cited By (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016154288A (ja) * | 2015-02-20 | 2016-08-25 | シャープ株式会社 | 情報処理装置、情報処理システム、情報処理方法および情報処理プログラム |
| JP2017092784A (ja) * | 2015-11-12 | 2017-05-25 | 株式会社コネクションズラボ | 口腔筋機能療法用動画配信システム |
| CN106073794A (zh) * | 2016-08-23 | 2016-11-09 | 吉林大学 | 一种可穿戴的下肢康复锻炼步态监测分析设备 |
| WO2018144874A1 (fr) * | 2017-02-05 | 2018-08-09 | Progressive Health Rehabilitation Inc. | Procédé et appareil pour mesurer la capacité d'un individu à effectuer une plage variable d'accès de barrière |
| WO2019022102A1 (fr) * | 2017-07-25 | 2019-01-31 | パナソニックIpマネジメント株式会社 | Procédé d'assistant d'activité, programme, et système d'assistant d'activité |
| JP2019024580A (ja) * | 2017-07-25 | 2019-02-21 | パナソニックIpマネジメント株式会社 | リハビリテーション支援システム、リハビリテーション支援方法及びプログラム |
| JP2019024579A (ja) * | 2017-07-25 | 2019-02-21 | パナソニックIpマネジメント株式会社 | リハビリテーション支援システム、リハビリテーション支援方法及びプログラム |
| JP2019058285A (ja) * | 2017-09-25 | 2019-04-18 | パナソニックIpマネジメント株式会社 | 活動支援方法、プログラム、及び活動支援システム |
| CN110496308A (zh) * | 2018-05-16 | 2019-11-26 | 山东蓓明医疗科技有限公司 | 可提供定制化康复训练的功能性电刺激系统及控制方法 |
| CN110496308B (zh) * | 2018-05-16 | 2023-08-22 | 山东蓓明医疗科技有限公司 | 可提供定制化康复训练的功能性电刺激系统及控制方法 |
| JP2020039566A (ja) * | 2018-09-10 | 2020-03-19 | 学校法人北里研究所 | リハビリ支援装置及びプログラム |
| JP7011317B2 (ja) | 2018-09-10 | 2022-02-10 | 学校法人北里研究所 | リハビリ支援装置及びプログラム |
| CN111035535A (zh) * | 2019-12-19 | 2020-04-21 | 成都信息工程大学 | 一种脑卒中康复训练系统及方法 |
| WO2021215207A1 (fr) * | 2020-04-22 | 2021-10-28 | コニカミノルタ株式会社 | Procédé mis en œuvre par ordinateur pour fournir des informations concernant un bénéficiaire de soins, programme et dispositif de fourniture d'informations |
| JP7726945B2 (ja) | 2020-04-23 | 2025-08-20 | ロム テクノロジーズ,インコーポレイテッド | コンピュータ実装システム、及びそれを用いた方法、並びにコンピュータ可読媒体 |
| JP2023099132A (ja) * | 2020-04-23 | 2023-07-11 | ロム テクノロジーズ,インコーポレイテッド | コンピュータ実装システム、及びそれを用いた方法、並びにコンピュータ可読媒体 |
| CN112842824B (zh) * | 2021-02-24 | 2023-05-16 | 郑州铁路职业技术学院 | 一种用于下肢康复恢复的训练方法 |
| CN112842824A (zh) * | 2021-02-24 | 2021-05-28 | 郑州铁路职业技术学院 | 一种用于下肢康复恢复的训练方法 |
| CN116440455A (zh) * | 2022-01-06 | 2023-07-18 | 深圳市奇诺动力科技有限公司 | 一种下肢康复训练设备的控制方法、设备和控制系统 |
| WO2023189649A1 (fr) * | 2022-03-30 | 2023-10-05 | ソニーグループ株式会社 | Système de traitement d'informations, programme et procédé de traitement d'informations |
| CN114795855A (zh) * | 2022-05-19 | 2022-07-29 | 重庆邮电大学 | 一种辅助腿部运动的可穿戴智能拐杖 |
| WO2024029400A1 (fr) * | 2022-08-01 | 2024-02-08 | 株式会社村田製作所 | Dispositif de commande pour vibreur de dispositif de présentation haptique, et dispositif de présentation haptique |
| JPWO2024029400A1 (fr) * | 2022-08-01 | 2024-02-08 | ||
| JP7782701B2 (ja) | 2022-08-01 | 2025-12-09 | 株式会社村田製作所 | 触力覚提示装置の振動体の制御装置、及び触力覚提示装置 |
| CN115588480A (zh) * | 2022-10-11 | 2023-01-10 | 武汉拓思瑞医疗科技有限公司 | 骨科术后远程康复训练方法、系统、服务器及存储介质 |
| JP7373781B1 (ja) | 2022-11-30 | 2023-11-06 | アイスリーメディカル株式会社 | システム、プログラム、及び方法。 |
| WO2024116512A1 (fr) * | 2022-11-30 | 2024-06-06 | アイスリーメディカル株式会社 | Système, programme et procédé |
| JP2024079113A (ja) * | 2022-11-30 | 2024-06-11 | アイスリーメディカル株式会社 | システム、プログラム、及び方法。 |
| WO2024125240A1 (fr) * | 2022-12-16 | 2024-06-20 | 中国科学院深圳先进技术研究院 | Procédé d'entraînement d'action et appareil d'entraînement l'utilisant |
| CN116211283A (zh) * | 2023-01-30 | 2023-06-06 | 首都医科大学宣武医院 | 一种康复训练中代偿判定的方法、装置及系统 |
| CN117860531A (zh) * | 2024-03-11 | 2024-04-12 | 天津市天津医院 | 一种基于肌电生物反馈的脊髓损伤康复装置 |
| CN117860531B (zh) * | 2024-03-11 | 2024-05-14 | 天津市天津医院 | 一种基于肌电生物反馈的脊髓损伤康复装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6242899B2 (ja) | 2017-12-06 |
| JPWO2015019477A1 (ja) | 2017-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6242899B2 (ja) | リハビリシステム及びその制御方法 | |
| US12011291B2 (en) | Non-invasive wearable biomechanical and physiology monitor for injury prevention and rehabilitation | |
| US20210260371A1 (en) | Patient therapy systems and methods | |
| US20190283247A1 (en) | Management of biomechanical achievements | |
| US10194837B2 (en) | Devices for measuring human gait and related methods of use | |
| US11272879B2 (en) | Systems and methods using a wearable device for monitoring an orthopedic implant and rehabilitation | |
| Marta et al. | Wearable biofeedback suit to promote and monitor aquatic exercises: A feasibility study | |
| JP7066729B2 (ja) | ウェアラブル装置を使用して整形外科インプラント及びリハビリテーションをモニタするためのシステム及び方法 | |
| US20220409098A1 (en) | A wearable device for determining motion and/or a physiological state of a wearer | |
| JP2020507382A (ja) | 関節の理学療法及びリハビリテーションをモニタするためのシステム及び方法 | |
| US11179065B2 (en) | Systems, devices, and methods for determining an overall motion and flexibility envelope | |
| US20210386611A1 (en) | Cloud-based control system and method enabling interactive clinical care using a powered mobility assistance device | |
| JP2020508722A (ja) | 理学療法及びリハビリテーションをモニタするためのユーザインターフェイスを備えたシステム及び方法 | |
| US20190117129A1 (en) | Systems, devices, and methods for determining an overall strength envelope | |
| US20240189980A1 (en) | Exosuit device and method for exosuit modeling and design | |
| Peng | A novel motion detecting strategy for rehabilitation in smart home | |
| JP6995737B2 (ja) | 支援装置 | |
| US20250169746A1 (en) | Intelligent system and use thereof | |
| Abdullah | Design and Development of Biofeedback Stick Technology (BfT) to Improve the Quality of Life of Walking Stick Users | |
| WO2020007802A1 (fr) | Système de détection et de surveillance cinématique de mouvements corporels dans l'eau, et procédé associé | |
| Ashoka et al. | Wearable Hand Orthotic Device for Stroke Monitoring and Rehabilitation | |
| Bou-Saïd | Real-Time Monitoring of the Patient Recuperative Progress Using a New Lower Limb Rehabilitation System | |
| Hendeby et al. | Healthy aging using physical activity monitoring | |
| Adinarayanan | Real-time Assessment and Visual Feedback for Patient Rehabilitation Using Inertial Sensors |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13890942 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2015530631 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 13890942 Country of ref document: EP Kind code of ref document: A1 |