WO2015196802A1 - Procédé et appareil de photographie, et dispositif électronique - Google Patents
Procédé et appareil de photographie, et dispositif électronique Download PDFInfo
- Publication number
- WO2015196802A1 WO2015196802A1 PCT/CN2015/071663 CN2015071663W WO2015196802A1 WO 2015196802 A1 WO2015196802 A1 WO 2015196802A1 CN 2015071663 W CN2015071663 W CN 2015071663W WO 2015196802 A1 WO2015196802 A1 WO 2015196802A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- area
- focus
- user
- definition
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images









Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/676—Bracketing for image capture at varying focusing conditions
Definitions
- the present invention relates to the field of data processing, and in particular, to a photographing method, device, and electronic device.
- the inventors have found that at least the following problems exist in the prior art: when the electronic device performs photographing, the user is required to select a focus area, and then the electronic device selects a focus area for the user to shoot. Obtain an image; if the user wants to select another area as the focus area, he must reselect a focus area, and then the mobile terminal re-shoots based on the new focus area again, which is cumbersome and inconvenient; it is also possible that the electronic device does not support the user to select the focus area. So that the user can only select the default focus area to take pictures, so that they can not get the image effect they want.
- Embodiments of the present invention provide a photographing method capable of simplifying a photographing operation.
- an embodiment of the present invention provides a photographing method, which is applied to an electronic terminal of a single camera, and includes:
- one image with the highest local definition is selected as the image to be processed
- the target picture is output for viewing by the user.
- the single camera is capable of moving the lens under the driving of the electric motor; then, collecting the images on the plurality of focus points along the shooting direction of the user include:
- An image is acquired while the single camera is stuck at any of the focus points.
- the plurality of focus points includes at least two focus points, and the object distances of the two focus points are not less than one Set the threshold.
- the method before the determining the focus area selected by the user in the finder frame, the method further includes:
- the grid area used for each acquired image is divided in a consistent manner
- the method further includes:
- the area resolution of a determined grid area or the determined plurality of grid areas The sum of the regional sharpness of the domain is used as the local sharpness of the focal region in the image.
- the images on the plurality of focus points are collected in the shooting direction along the user After that, it also includes:
- the photographing method provided by the embodiment of the invention collects and calculates images on a plurality of focus points in the finder frame along the direction of the camera, and obtains a depth map corresponding to each image. Moreover, when the user selects the focus area of the finder frame, the sharpness of each image focus area is compared, and the image with the highest definition is selected as the image to be processed, and the image is to be processed outside the focus area according to the depth map of the image to be processed. The image is blurred to get the picture that the user wants.
- the method of the present invention only needs to take multiple images at a time, and then the user selects a focus area for subsequent blurring processing, as compared with a method in which the user needs to repeatedly operate the electronic device to perform repeated photographing based on multiple focus regions. In this process, the user only needs to complete one shooting action to select all the focus areas in the image, which is relatively easy to operate.
- the present invention also provides a photographing apparatus provided with a single camera, comprising:
- a collecting unit configured to collect images on a plurality of focus points along a shooting direction of the single camera
- a first calculating unit configured to perform calculation according to the collected images, to obtain a depth map corresponding to each image
- a first determining unit configured to determine a focus area selected by the user in the finder frame
- a selecting unit for selecting an image with the highest local definition as the image to be processed by comparing the local sharpness of the focus area in each image
- a blurring processing unit configured to perform a blurring process on an image other than the focus area in the image to be processed according to a depth map of the image to be processed, to obtain a target image
- An output unit configured to output the target picture for viewing by a user.
- the apparatus further includes An electric motor, wherein the single camera is capable of moving the lens under the driving of the electric motor;
- the collecting unit is further configured to configure different current values for the electric motor, so that the lenses of the single camera are respectively imaged on a plurality of focus points; when the single camera stays at any focus point, the collection is performed. image.
- the plurality of focus points include at least two focus points, and the object distance difference between the two focus points is not less than one Set the threshold.
- the method further includes:
- a dividing unit configured to perform mesh area division on the collected image; wherein the mesh area used by each acquired image is divided in a consistent manner;
- a second calculating unit configured to calculate a regional definition of each of the mesh regions
- a second determining unit configured to determine a position, a shape, and an area of the focus area selected by the user in the finder frame
- a third determining unit configured to determine a target focus area according to the position, shape, and area, and a ratio of a width relationship and a height ratio of the captured image to the width of the finder frame;
- a fourth determining unit configured to determine one mesh area or multiple mesh areas in each image that can cover the target focus area
- a fifth determining unit configured to use the sum of the area definition of one determined grid area or the area definition of the determined plurality of grid areas as the local definition of the focus area in the image.
- the method further includes:
- An identifier allocation unit configured to allocate the same identification information for each captured image
- a storage unit configured to store the assigned identification information and images in a unified manner.
- an embodiment of the present invention further provides an electronic device, which is provided with a single camera, a processor, a memory, and an input/output interface.
- the memory stores a computer program, and the processor calls the computer program to control the Said single camera and input and output interface;
- the single camera is configured to collect images on a plurality of focus points along a shooting direction
- the processor is configured to perform calculation according to the collected image to obtain a depth map corresponding to each image; determine a focus area selected by the user in the finder frame; and perform local definition of the focus area in each image Comparing, selecting one image with the highest local resolution as the image to be processed; according to the depth map of the image to be processed, the image other than the focus area in the image to be processed is blurred to obtain a target image;
- An input/output interface configured to output the target image for viewing by a user
- the memory is configured to store an image of a plurality of focus points, a depth map corresponding to each image, and a target picture.
- an electric motor is further provided;
- the processor is further configured to configure different current values for the electric motor to cause the lenses of the single camera to image on a plurality of focus points respectively;
- the single camera is also used to acquire images at any of the focus points.
- the plurality of focus points include at least two focus points, and the object distances of the two focus points are not less than a preset Threshold.
- the processor is further configured to perform mesh area division on the collected image, and calculate a regional definition of each of the mesh areas;
- the acquired image uses a grid area division manner; determines the position, shape, and area of the focus area selected by the user in the finder frame; and according to the position, shape, and area, and the captured image and the finder frame Width ratio relationship and height proportional relationship, determining a target focus area; determining a grid area or a plurality of grid areas in each image that can cover the target focus area; and determining a region definition of a grid area or The sum of the regional sharpness of the determined plurality of mesh regions as the local sharpness of the focus region in the image;
- the memory is also used for the area definition of each grid area.
- the processor is further configured to collect Each image is assigned the same identification information
- the memory is further configured to uniformly store the allocated identification information and images.
- the photographing method provided by the embodiment of the invention collects and calculates images on a plurality of focus points along the direction of the camera to obtain a depth map corresponding to each image. Moreover, when the user selects the focus area of the finder frame, the sharpness of each image focus area is compared, and the image with the highest definition is selected as the image to be processed, and the image is to be processed outside the focus area according to the depth map of the image to be processed. The image is blurred to get the picture that the user wants.
- the method of the present invention only needs to take multiple images at a time, and then the user selects a focus area for subsequent blurring processing, as compared with a method in which the user needs to repeatedly operate the electronic device to perform repeated photographing based on multiple focus regions. In this process, the user only needs to complete one shooting action to select all the focus areas in the image, which is relatively easy to operate. Moreover, the focus area can be determined according to the user's selection, and the user experience is improved.
- FIG. 1 is a flowchart of a photographing method according to an embodiment of the present invention
- FIG. 2 is a flowchart of another photographing method according to an embodiment of the present invention.
- FIG. 3 is a flowchart of another photographing method according to an embodiment of the present invention.
- FIG. 4 is a schematic structural diagram of area division according to an embodiment of the present invention.
- FIG. 5 is a flowchart of another photographing method according to an embodiment of the present invention.
- FIG. 6 is a schematic diagram of comparison of a focus area and a mesh division according to an embodiment of the present invention.
- FIG. 7 is a schematic diagram of another focus area and mesh division according to an embodiment of the present invention.
- FIG. 8 is a comparison of another focus area and mesh division according to an embodiment of the present invention. schematic diagram
- FIG. 9 is a flowchart of a photographing method according to an embodiment of the present invention.
- FIG. 10 is a structural block diagram of a camera device according to an embodiment of the present invention.
- FIG. 11 is a structural block diagram of another imaging apparatus according to an embodiment of the present invention.
- FIG. 12 is a structural block diagram of another imaging apparatus according to an embodiment of the present invention.
- FIG. 13 is a structural block diagram of an electronic terminal according to an embodiment of the present invention.
- the embodiment of the invention provides a photographing method, which can be applied to a single camera mobile electronic device with a camera function, which is specifically implemented by a specific application program or service in an operating system on an electronic device, and the flow thereof is as shown in FIG. ,include:
- the shooting direction is the lens orientation of the single camera.
- the operation principle of acquiring an image is to project an optical signal collected in the lens to a light collecting unit (generally a light sensing array) in the electronic device, and then the optical collecting unit converts the optical signal into an electrical signal, and then the electrical signal is digitally
- the original image data is quantized.
- ISP Image Signal Processing
- the plurality of focus points include at least two focus points, and the object distance difference between the two focus points is not less than a preset threshold, and the preset threshold is generally an empirical value, and the setting principle is The depth map of the acquired image can be generated. The depth of field of images acquired at different focus points is different.
- a plurality of images corresponding to the focus points that is, images of different depths of field are obtained, and the principle of calculating the depth map based on the obtained images is to select two images capable of clearly distinguishing the front and back scenes to calculate the foreground.
- the depth map of the image such as pic0 to pic7, has a total of 7 focus points, that is, pic0 is the closest one to the focus point, pic7 is the farthest point to the focus point, and pic0 and pic6 can be selected to calculate pic0 when calculating the map map.
- the depth map you can also choose pic1 and pic7 to calculate the depth map of pic1, and so on.
- the user can manually click on the area in the finder frame, and the system will set the user's click area as the focus area. Moreover, when the user does not click, the system default center area is the focus area.
- one image with the highest local definition is selected as the image to be processed.
- a fast Gaussian blurring algorithm based on depth map pixel-by-pixel calculation may be used to perform blurring processing, that is, the degree of blurring of each point is controlled according to the value of the depth map. Get a picture that is sharpest around the focus area and fades toward the outside.
- the embodiment of the present invention is not limited to the above-mentioned virtualization mode, and any existing disclosed method based on the depth map implementation blur can be applied to the embodiment of the present invention.
- the output target image is an image that has been blurred.
- the photographing method provided by the embodiment of the invention collects and calculates images on a plurality of focus points in the finder frame along the direction of the camera, and obtains a depth map corresponding to each image. Moreover, when the user selects the focus area of the finder frame, the sharpness of each image focus area is compared, and the image with the highest definition is selected as the image to be processed, and the image is to be processed outside the focus area according to the depth map of the image to be processed. The image is blurred to get the picture that the user wants.
- the present invention is compared to a method in which a user of the prior art needs to repeatedly operate an electronic device based on a plurality of focus regions to perform repeated photographing.
- the technical solution only needs to take multiple images at a time, and then the user selects the focus area for subsequent blurring processing.
- the user only needs to complete one shooting action to select all the focus areas in the image, and the operation is relatively simple.
- the focus area can be determined according to the user's selection, and the user experience is improved.
- a specific method flow for implementing the foregoing step 101 is provided.
- the method flow requires that a single camera of the electronic device can move the lens under the driving of the electric motor, and the method flow is as shown in FIG. 2 .
- the motor that controls the movement of the camera will move according to different current values.
- the lens will move a small distance, in millimeters or micrometers, when the lens stays in a new position, so that The focus point of the lens changes to image on several focus points.
- the pre-processing of the acquired image is also required.
- the following method flow for implementing the pre-processing is provided, which is required to be performed before step 103. As shown in Figure 3, it also includes:
- the grid area used for each acquired image is divided in the same manner.
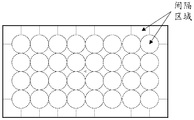
- the present embodiment provides an example as shown in FIG. 4, in which the actual width and height (in pixels) of the acquired image are respectively divided into multiple intervals in the horizontal direction and the vertical direction (Fig. In 4, the rectangle is taken as an example), and the intersection position between every two rows or two columns of multi-interval regions is also a spacer region (for the convenience of distinction, the circle in FIG. 4 is taken as an example, and the actual use of the technical solution should be compared with other
- the rectangular space is set to a rectangle.
- the content shown in FIG. 4 above is only an example, and the shape and the number of divisions of the multi-interval area are The embodiment of the invention is not particularly limited.
- the local definition can be calculated by the adjacent pixel gray-scale variance method, or can be calculated along with other existing image sharpness calculation methods that have been disclosed.
- the definitions of each part of the image are separately calculated, so that when the user selects the focus area, the electronic device can directly obtain the corresponding sharpness for the focus area, and the operation is quick and easy. .
- step 301 a matching method of the focus area and the mesh division area selected by the user is further provided.
- the method includes:
- the position of the focus area selected by the user in the framing frame can be manually selected by the user, and the shape is taken by the user, and the size of the area is determined by the circled range.
- the user can directly use the system default focus area.
- Electronic devices typically use the center coordinates and edge coordinates of the focus area to determine the focus area.
- the framing frame has the same shape as the captured image, but the number of pixels included in the framing frame is different from the number of pixels in the framing frame due to the different resolution of the captured image.
- the proportional relationship and the wide proportional relationship For example, 8M YUV image data is 3264 pixels wide and 2448 pixels high.
- the frame size is 1440 pixels wide and 1080 pixels high.
- the width ratio is 102 to 45, and the height ratio is 102 to 45. That is, when the user selects the coordinates of the 90th pixel in the framing frame and the 180th pixel, the image is 204 pixels wide and 408 pixels high, that is, the position and image selected by the user in the finder frame.
- the location is the same.
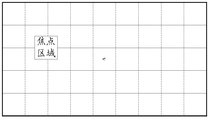
- FIGS. 6 to 8 a comparison diagram of the focus area and the mesh division is shown in FIGS. 6 to 8.
- FIG. 6 shows that the target focus area is covered by only one mesh area
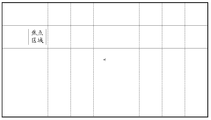
- FIG. 7 shows that the target focus area is covered by a plurality of mesh areas.
- the target focus area is shown inside a grid area in FIG.
- the area definition of the grid area is the local definition of the focus area; if multiple grid areas are determined to cover the focus area, then multiple grid areas are The sum of the regional intelligibility can be calculated by direct summation or weighted summation, and the sum of the regional intelligibility is taken as the local definition of the focus area.
- each grid area has its own weight, and the weight is set by using the center of the focus area as a reference to calculate the distance between the center of each grid area and the center of the focus area. The closer the distance is, the weight is The higher the value.
- the electronic terminal when the user performs the subsequent operation, the electronic terminal conveniently calls the image, and the captured image is uniformly stored.
- the method further includes:
- All the collected images are assigned the same identification information, and the assigned identification information and images are uniformly stored.
- a set of the same logo can be set for a group of captured images.
- an image set to the same logo is called, so that the user can re-image the image.
- the present invention also provides a photographing device, which is required to be provided with a single camera, which can be used to implement the method flow shown in FIG. 1 to FIG.
- the collecting unit 11 is configured to collect images of a plurality of focus points along the shooting direction of the single camera.
- a first calculating unit 12 configured to perform calculation according to the collected image, and obtain each The corresponding depth map of each image.
- the first determining unit 13 is configured to determine a focus area selected by the user in the finder frame.
- the selecting unit 14 is configured to select one image with the highest local definition as the image to be processed by comparing the local sharpness of the focus area in each image.
- the blurring processing unit 15 is configured to perform a blurring process on the image other than the focus area in the image to be processed according to the depth map of the image to be processed, to obtain a target image.
- the output unit 16 is configured to output the target picture for viewing by a user.
- the device also requires an electric motor that is capable of moving the lens under the drive of the electric motor.
- the collecting unit 11 is further configured to configure different current values for the electric motor, so that the lenses of the single camera are respectively imaged on a plurality of focus points; when the single camera stays at any focus point, Capture images.
- the plurality of focus points include at least two focus points, and the object distance difference between the two focus points is not less than a predetermined threshold.
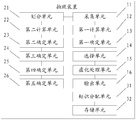
- the method further includes:
- the dividing unit 21 is configured to perform mesh area division on the collected image; wherein the mesh area used in each captured image is divided in a consistent manner.
- the second calculating unit 22 is configured to calculate the regional definition of each mesh area.
- the second determining unit 23 is configured to determine a position, a shape, and an area of the focus area selected by the user in the finder frame.
- the third determining unit 24 is configured to determine the target focus area according to the position, shape, and area, and the ratio of the width of the captured image to the width of the finder frame and the height proportional relationship.
- the fourth determining unit 25 is configured to determine one mesh area or a plurality of mesh areas in each image that can cover the target focus area.
- the fifth determining unit 26 is configured to use the sum of the area definition of one determined grid area or the area definition of the determined plurality of grid areas as the local definition of the focus area in the image.
- the device further includes:
- the identifier assigning unit 31 is configured to allocate the same identification information for each captured image.
- the storage unit 32 is configured to store the allocated identification information and the image in a unified manner.
- a photographing device collects and calculates images on a plurality of focus points in a finder frame along a direction of a camera to obtain a depth map corresponding to each image. Moreover, when the user selects the focus area of the finder frame, the sharpness of each image focus area is compared, and the image with the highest definition is selected as the image to be processed, and the image is to be processed outside the focus area according to the depth map of the image to be processed. The image is blurred to get the picture that the user wants.
- the method of the present invention only needs to take multiple images at a time, and then the user selects a focus area for subsequent blurring processing, as compared with a method in which the user needs to repeatedly operate the electronic device to perform repeated photographing based on multiple focus regions.
- the user only needs to complete one shooting action to select all the focus areas in the image, which is relatively easy to operate.
- the focus area can be determined according to the user's selection, and the user experience is improved.
- An embodiment of the present invention further provides an electronic device.
- a single camera 41, a processor 42, a memory 43, and an input/output interface 44 are provided.
- the memory 43 stores a computer program, and the processor 42 is stored.
- the computer program is invoked to control the single camera 41 and the input and output interface 44.
- Each module communicates over the bus.
- Each of the above modules can be used to implement the method flow as shown in FIGS. 1 to 9.
- the single camera 41 is used to collect images on a plurality of focus points along the shooting direction.
- the processor 41 is configured to perform calculation according to the collected images to obtain a depth map corresponding to each image; determine a focus area selected by the user in the finder frame; and pass local definition of the focus area in each image For comparison, an image with the highest local sharpness is selected as the image to be processed; according to the depth map of the image to be processed, the image other than the focus region in the image to be processed is blurred to obtain a target image.
- the input and output interface 44 is configured to output the target picture for the user to view.
- the memory 43 is configured to store and collect images on several focus points, each image The corresponding depth map and target image.
- the electronic device is further provided with an electric motor.
- the processor 42 is further configured to configure the electric motor with different current values such that the lenses of the single camera are respectively imaged on a plurality of focus points.
- the single camera 41 is also used to acquire an image at any of the focus points.
- the plurality of focus points include at least two focus points, and the object distance difference between the two focus points is not less than a predetermined threshold.
- the processor 42 is further configured to perform mesh area division on the collected image, and calculate a regional definition of each of the mesh areas; wherein the network used for each acquired image is used.
- the division manner of the grid area is consistent; determining the position, shape and area of the focus area selected by the user in the finder frame; determining according to the position, the shape and the area, and the proportional relationship between the acquired image and the width of the finder frame and the height proportional relationship a target focus area; determining one grid area or a plurality of grid areas in each image that can cover the target focus area; determining the area definition of one of the grid areas or the determined plurality of grid areas
- the sum of the regional sharpness is used as the local sharpness of the focus area in the image.
- the memory 43 is also used for the area definition of each grid area.
- the processor 42 is further configured to allocate the same identification information for each captured image.
- the memory 43 is further configured to uniformly store the allocated identification information and images.
- the electronic terminal for photographing collects and calculates images on a plurality of focus points in the finder frame along the direction of the camera, and obtains a depth map corresponding to each image. Moreover, when the user selects the focus area of the finder frame, the sharpness of each image focus area is compared, and the image with the highest definition is selected as the image to be processed, and the image is to be processed outside the focus area according to the depth map of the image to be processed. The image is blurred to get the picture that the user wants. Compared with the prior art, the user needs to repeatedly operate the electronic device based on multiple focus areas to perform repeated photographing. The technical solution of the present invention only needs to take multiple images at one time, and then select by the user.
- the focus area is selected for subsequent blurring processing.
- the user only needs to complete one shooting action to select all the focus areas in the image, and the operation is relatively simple.
- the focus area can be determined according to the user's selection, and the user experience is improved.
- the present invention can be implemented by means of software plus necessary general hardware, and of course, by hardware, but in many cases, the former is a better implementation. .
- the technical solution of the present invention which is essential or contributes to the prior art, can be embodied in the form of a software product stored in a readable storage medium, such as a floppy disk of a computer.
- a hard disk or optical disk, etc. includes instructions for causing a computer device (which may be a personal computer, server, or network device, etc.) to perform the methods described in various embodiments of the present invention.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Studio Devices (AREA)
Abstract
La présente invention concerne un procédé de photographie, et a trait au domaine du traitement de données et est utilisée pour résoudre le problème de complexité dans une opération de photographie. Selon la solution technique décrite par la présente invention, de multiples images sont obtenues par photographie en une seule fois, une carte de profondeur est calculée, et en fonction de la définition des multiples images, par réalisation de l'opération de photographie une seule fois par un utilisateur, l'image ayant la définition la plus élevée dans une zone de mise au point peut être obtenue, et l'image ayant un effet de flou peut également être générée. Des modes de réalisation de la présente invention peuvent être appliqués au scénario dans lequel un terminal électronique prend une photographie.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201410291156.X | 2014-06-25 | ||
| CN201410291156.XA CN104104869A (zh) | 2014-06-25 | 2014-06-25 | 一种拍照方法、装置及电子设备 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015196802A1 true WO2015196802A1 (fr) | 2015-12-30 |
Family
ID=51672638
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2015/071663 Ceased WO2015196802A1 (fr) | 2014-06-25 | 2015-01-27 | Procédé et appareil de photographie, et dispositif électronique |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN104104869A (fr) |
| WO (1) | WO2015196802A1 (fr) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111080493A (zh) * | 2018-10-18 | 2020-04-28 | 杭州海康威视数字技术股份有限公司 | 一种菜品信息识别方法、装置及菜品自助结算系统 |
| CN113627051A (zh) * | 2021-07-23 | 2021-11-09 | 中国地质科学院地球物理地球化学勘查研究所 | 一种重力异常场分离方法、系统、存储介质和电子设备 |
| CN114390189A (zh) * | 2020-10-22 | 2022-04-22 | 北京小米移动软件有限公司 | 图像处理方法、装置、存储介质及移动终端 |
| WO2022198525A1 (fr) * | 2021-03-24 | 2022-09-29 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | Procédé d'amélioration de la stabilité d'un traitement de bokeh et dispositif électronique |
| CN118134920A (zh) * | 2024-05-07 | 2024-06-04 | 深圳市生强科技有限公司 | 自适应对焦方法、装置及可读存储介质 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104104869A (zh) * | 2014-06-25 | 2014-10-15 | 华为技术有限公司 | 一种拍照方法、装置及电子设备 |
| CN104408687B (zh) * | 2014-10-31 | 2018-07-27 | 酷派软件技术(深圳)有限公司 | 一种图片播放的方法及装置 |
| CN104680563B (zh) | 2015-02-15 | 2018-06-01 | 青岛海信移动通信技术股份有限公司 | 一种图像数据的生成方法和装置 |
| CN104680478B (zh) | 2015-02-15 | 2018-08-21 | 青岛海信移动通信技术股份有限公司 | 一种目标图像数据的选取方法和装置 |
| CN105160695B (zh) * | 2015-06-30 | 2019-02-01 | Oppo广东移动通信有限公司 | 一种照片处理方法及移动终端 |
| CN106550184B (zh) * | 2015-09-18 | 2020-04-03 | 中兴通讯股份有限公司 | 照片处理方法及装置 |
| CN105654463A (zh) * | 2015-11-06 | 2016-06-08 | 乐视移动智能信息技术(北京)有限公司 | 应用于连拍过程中的图像处理方法和装置 |
| CN105827980B (zh) * | 2016-05-04 | 2018-01-19 | 广东欧珀移动通信有限公司 | 对焦控制方法及装置、成像控制方法及装置、电子装置 |
| CN106339476B (zh) * | 2016-08-30 | 2019-10-29 | 北京寺库商贸有限公司 | 一种图像处理方法和系统 |
| WO2018214077A1 (fr) * | 2017-05-24 | 2018-11-29 | 深圳市大疆创新科技有限公司 | Procédé et appareil de photographie, et procédé et appareil de traitement d'image |
| CN107277354B (zh) * | 2017-07-03 | 2020-04-28 | 瑞安市智造科技有限公司 | 一种虚化拍照方法、虚化拍照终端和计算机可读存储介质 |
| CN109474780B (zh) * | 2017-09-07 | 2023-07-25 | 虹软科技股份有限公司 | 一种用于图像处理的方法和装置 |
| CN107566723B (zh) * | 2017-09-13 | 2019-11-19 | 维沃移动通信有限公司 | 一种拍摄方法、移动终端及计算机可读存储介质 |
| CN107809583A (zh) * | 2017-10-25 | 2018-03-16 | 努比亚技术有限公司 | 拍照处理方法、移动终端及计算机可读存储介质 |
| CN108234865A (zh) * | 2017-12-20 | 2018-06-29 | 深圳市商汤科技有限公司 | 图像处理方法、装置、计算机可读存储介质和电子设备 |
| CN108320263A (zh) * | 2017-12-29 | 2018-07-24 | 维沃移动通信有限公司 | 一种图像处理的方法、装置及移动终端 |
| CN108305215A (zh) * | 2018-01-23 | 2018-07-20 | 北京易智能科技有限公司 | 一种基于智能移动终端的图像处理方法及系统 |
| CN109710148A (zh) * | 2018-12-19 | 2019-05-03 | 广州文远知行科技有限公司 | 图像标注框的选择方法、装置、计算机设备和存储介质 |
| CN110691191A (zh) * | 2019-09-16 | 2020-01-14 | RealMe重庆移动通信有限公司 | 一种图像虚化方法、装置及计算机存储介质和终端设备 |
| CN110602397A (zh) * | 2019-09-16 | 2019-12-20 | RealMe重庆移动通信有限公司 | 图像处理方法、装置、终端及存储介质 |
| CN113038070B (zh) * | 2019-12-25 | 2022-10-14 | 浙江宇视科技有限公司 | 一种设备调焦方法、装置和云平台 |
| CN111568240A (zh) * | 2020-02-29 | 2020-08-25 | 佛山市云米电器科技有限公司 | 饮水机出水控制方法、饮水机及计算机可读存储介质 |
| JP2021145209A (ja) * | 2020-03-11 | 2021-09-24 | キヤノン株式会社 | 電子機器 |
| CN113516071B (zh) * | 2021-07-08 | 2024-06-28 | 深圳喜为智慧科技有限公司 | 一种猪只估重方法 |
| CN115086558B (zh) * | 2022-06-14 | 2023-12-01 | Oppo广东移动通信有限公司 | 对焦方法、摄像设备、终端设备及存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8284258B1 (en) * | 2008-09-18 | 2012-10-09 | Grandeye, Ltd. | Unusual event detection in wide-angle video (based on moving object trajectories) |
| CN103702032A (zh) * | 2013-12-31 | 2014-04-02 | 华为技术有限公司 | 图像处理方法、装置和终端设备 |
| CN103826064A (zh) * | 2014-03-06 | 2014-05-28 | 华为技术有限公司 | 图像处理方法、装置及手持电子设备 |
| CN104104869A (zh) * | 2014-06-25 | 2014-10-15 | 华为技术有限公司 | 一种拍照方法、装置及电子设备 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2075802B (en) * | 1980-05-12 | 1984-05-31 | Control Data Corp | Network access device |
| JPH11125522A (ja) * | 1997-10-21 | 1999-05-11 | Sony Corp | 画像処理装置および方法 |
| CN1327681C (zh) * | 2005-08-08 | 2007-07-18 | 华为技术有限公司 | 一种实现初始因特网协议多媒体子系统注册的方法 |
| US8553093B2 (en) * | 2008-09-30 | 2013-10-08 | Sony Corporation | Method and apparatus for super-resolution imaging using digital imaging devices |
| TWI394085B (zh) * | 2008-10-28 | 2013-04-21 | Asustek Comp Inc | 辨識被攝主體之維度形態的方法 |
| CN101500133A (zh) * | 2009-02-27 | 2009-08-05 | 中兴通讯股份有限公司 | 用于可视用户设备的摄像头控制方法及系统 |
| CN102025695A (zh) * | 2009-09-11 | 2011-04-20 | 中兴通讯股份有限公司 | 一种识别pui类型的方法、设备及系统 |
| JP4779041B2 (ja) * | 2009-11-26 | 2011-09-21 | 株式会社日立製作所 | 画像撮影システム、画像撮影方法、および画像撮影プログラム |
| CN103207664B (zh) * | 2012-01-16 | 2016-04-27 | 联想(北京)有限公司 | 一种图像处理方法和设备 |
| CN103634588A (zh) * | 2012-08-27 | 2014-03-12 | 联想(北京)有限公司 | 一种影像构成方法及电子设备 |
| CN102891966B (zh) * | 2012-10-29 | 2015-07-01 | 珠海全志科技股份有限公司 | 数码成像设备的对焦方法及装置 |
| CN103491309B (zh) * | 2013-10-10 | 2017-12-22 | 魅族科技(中国)有限公司 | 图像数据的采集方法和终端 |
-
2014
- 2014-06-25 CN CN201410291156.XA patent/CN104104869A/zh active Pending
-
2015
- 2015-01-27 WO PCT/CN2015/071663 patent/WO2015196802A1/fr not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8284258B1 (en) * | 2008-09-18 | 2012-10-09 | Grandeye, Ltd. | Unusual event detection in wide-angle video (based on moving object trajectories) |
| CN103702032A (zh) * | 2013-12-31 | 2014-04-02 | 华为技术有限公司 | 图像处理方法、装置和终端设备 |
| CN103826064A (zh) * | 2014-03-06 | 2014-05-28 | 华为技术有限公司 | 图像处理方法、装置及手持电子设备 |
| CN104104869A (zh) * | 2014-06-25 | 2014-10-15 | 华为技术有限公司 | 一种拍照方法、装置及电子设备 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111080493A (zh) * | 2018-10-18 | 2020-04-28 | 杭州海康威视数字技术股份有限公司 | 一种菜品信息识别方法、装置及菜品自助结算系统 |
| CN111080493B (zh) * | 2018-10-18 | 2023-09-05 | 杭州海康威视数字技术股份有限公司 | 一种菜品信息识别方法、装置及菜品自助结算系统 |
| CN114390189A (zh) * | 2020-10-22 | 2022-04-22 | 北京小米移动软件有限公司 | 图像处理方法、装置、存储介质及移动终端 |
| WO2022198525A1 (fr) * | 2021-03-24 | 2022-09-29 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | Procédé d'amélioration de la stabilité d'un traitement de bokeh et dispositif électronique |
| CN113627051A (zh) * | 2021-07-23 | 2021-11-09 | 中国地质科学院地球物理地球化学勘查研究所 | 一种重力异常场分离方法、系统、存储介质和电子设备 |
| CN113627051B (zh) * | 2021-07-23 | 2024-01-30 | 中国地质科学院地球物理地球化学勘查研究所 | 一种重力异常场分离方法、系统、存储介质和电子设备 |
| CN118134920A (zh) * | 2024-05-07 | 2024-06-04 | 深圳市生强科技有限公司 | 自适应对焦方法、装置及可读存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104104869A (zh) | 2014-10-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2015196802A1 (fr) | Procédé et appareil de photographie, et dispositif électronique | |
| CN108898567B (zh) | 图像降噪方法、装置及系统 | |
| US10205896B2 (en) | Automatic lens flare detection and correction for light-field images | |
| CN107087107B (zh) | 基于双摄像头的图像处理装置及方法 | |
| EP3480784B1 (fr) | Procédé et dispositif de traitement d'images | |
| US10269130B2 (en) | Methods and apparatus for control of light field capture object distance adjustment range via adjusting bending degree of sensor imaging zone | |
| US9843787B2 (en) | Generation and use of a 3D radon image | |
| CN108076278B (zh) | 一种自动对焦方法、装置及电子设备 | |
| EP4013033A1 (fr) | Procédé et appareil de mise au point sur un sujet, dispositif électronique et support de stockage | |
| US20170256036A1 (en) | Automatic microlens array artifact correction for light-field images | |
| EP2768214A2 (fr) | Procédé de suivi d'objet utilisant une caméra et système de caméra de suivi d'objet | |
| KR102049080B1 (ko) | 영상 처리 장치 및 방법 | |
| WO2016065991A1 (fr) | Procédés et appareil permettant de commander une capture de champ lumineux | |
| JP6319972B2 (ja) | 画像処理装置、撮像装置、画像処理方法、およびプログラム | |
| JP2014138290A (ja) | 撮像装置及び撮像方法 | |
| CN110490196B (zh) | 主体检测方法和装置、电子设备、计算机可读存储介质 | |
| WO2018228466A1 (fr) | Procédé et appareil d'affichage de région de mise au point, et dispositif terminal | |
| CN104680563B (zh) | 一种图像数据的生成方法和装置 | |
| US9769379B2 (en) | Method and apparatus for selecting target image | |
| CN110881103B (zh) | 对焦控制方法和装置、电子设备、计算机可读存储介质 | |
| CN106576140B (zh) | 图像处理装置以及摄像装置 | |
| CN106791456A (zh) | 一种拍照方法及电子设备 | |
| JP2017060010A (ja) | 撮像装置、撮像装置の制御方法、およびプログラム | |
| CN116456191A (zh) | 图像生成方法、装置、设备及计算机可读存储介质 | |
| US8736706B1 (en) | Method and system for generating high resolution composite images |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15810946 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15810946 Country of ref document: EP Kind code of ref document: A1 |