WO2016152873A1 - 自動運転支援装置、制御方法、プログラム及び記憶媒体 - Google Patents
自動運転支援装置、制御方法、プログラム及び記憶媒体 Download PDFInfo
- Publication number
- WO2016152873A1 WO2016152873A1 PCT/JP2016/059036 JP2016059036W WO2016152873A1 WO 2016152873 A1 WO2016152873 A1 WO 2016152873A1 JP 2016059036 W JP2016059036 W JP 2016059036W WO 2016152873 A1 WO2016152873 A1 WO 2016152873A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- automatic driving
- information
- function
- vehicle
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0059—Estimation of the risk associated with autonomous or manual driving, e.g. situation too complex, sensor failure or driver incapacity
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096725—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information generates an automatic action on the vehicle control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0011—Planning or execution of driving tasks involving control alternatives for a single driving scenario, e.g. planning several paths to avoid obstacles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3461—Preferred or disfavoured areas, e.g. dangerous zones, toll or emission zones, intersections, manoeuvre types or segments such as motorways, toll roads or ferries
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096805—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route
- G08G1/096827—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route where the route is computed onboard
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096833—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096833—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route
- G08G1/096838—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route where the user preferences are taken into account or the user selects one route out of a plurality
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096833—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route
- G08G1/09685—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route where the complete route is computed only once and not updated
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096855—Systems involving transmission of navigation instructions to the vehicle where the output is provided in a suitable form to the driver
- G08G1/096866—Systems involving transmission of navigation instructions to the vehicle where the output is provided in a suitable form to the driver where the complete route is shown to the driver
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/0969—Systems involving transmission of navigation instructions to the vehicle having a display in the form of a map
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/043—Identity of occupants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/20—Ambient conditions, e.g. wind or rain
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/65—Data transmitted between vehicles
Definitions
- the present invention relates to an automatic driving technique.
- Patent Document 1 discloses a technique for recognizing a running lane or a stationary target based on an image of a camera installed in a vehicle.
- the present invention has been made in order to solve the above-described problems, and a main object of the present invention is to provide an automatic driving support device capable of suitably determining the function and degree of executable automatic driving.
- the invention described in the claims includes a first acquisition unit that acquires or stores first information about a surrounding information acquisition unit that acquires information about a vehicle periphery or information about a vehicle state, and second information about a road in a predetermined section. Based on the second acquisition unit that acquires the first information, and the first information and the second information, the degree of the function related to the automatic driving that the vehicle can realize in the predetermined section is determined for each function of the automatic driving. And a determination unit.
- the invention described in the claims is the first acquisition unit that acquires or stores the first information related to the type or performance of the peripheral information acquisition unit that acquires information around the vehicle, and the second information about the road in a predetermined section. And a determination unit that determines a degree of a function related to automatic driving that can be realized by the vehicle in the predetermined section based on the first information and the second information.
- the invention described in the claims is a first acquisition unit that acquires or stores first information related to the degree of functions related to automatic driving that can be performed by the vehicle, and second information that acquires second information about roads in a predetermined section.
- a determination unit that determines a degree of the function related to the automatic driving that the vehicle can realize in the predetermined section for each function of the automatic driving based on the two acquisition units, the first information, and the second information; It is characterized by providing.
- the invention described in the claims is a control method executed by the automatic driving support device, wherein the first information about the surrounding information acquisition unit for acquiring information about the vehicle periphery or information about the state of the vehicle, and in a predetermined section And determining a degree of the function relating to the automatic driving that can be realized by the vehicle in the predetermined section for each function of the automatic driving based on the second information regarding the road.
- the invention described in the claims is a program executed by a computer, and includes first information related to a peripheral information acquisition unit that acquires information about a vehicle periphery or information about a vehicle state, and a road related road in a predetermined section.
- the computer is caused to function as a determination unit that determines the degree of the function related to the automatic driving that can be realized by the vehicle in the predetermined section for each function of the automatic driving based on the two information.
- the block structure of a driving assistance device is shown.
- operation data element is shown.
- the automatic driving support device includes a first acquisition unit that acquires or stores first information related to a peripheral information acquisition unit that acquires information about a vehicle periphery or information related to a vehicle state, The vehicle can be realized in the predetermined section for each function of automatic driving based on the second acquisition unit that acquires the second information on the road in the section, and the first information and the second information. And a determination unit that determines the degree of function related to automatic driving.
- automated driving means not only “completely automatic driving” in which the driver does not intervene in driving operation under any circumstances, but also only when the specific environment and conditions are met. It also includes “temporary automatic driving” that does not require driving operations. In addition, “automatic driving” in the present invention refers to driving for the purpose of reducing the driving load on the driver or maintaining the stability of driving of the vehicle even when the driver performs driving operation. It also includes “partial automatic driving” (driving support function) that automatically controls a part of the vehicle (for example, steering of a vehicle).
- the automatic driving support device preferably has a degree of function related to automatic driving that can be realized in a predetermined section for each function of automatic driving based on the first information related to the peripheral information acquisition unit and the second information related to the road. Can be determined.
- the determination unit performs the determination based on table information indicating conditions regarding the second information for each degree of the function. According to this aspect, the automatic driving support device can accurately determine the degree of functions related to automatic driving that can be realized in a predetermined section.
- the determination unit determines a degree of the function related to the automatic driving that can be realized by the vehicle in the predetermined section among the plurality of functions related to the automatic driving.
- the automatic driving support device can suitably determine the function and degree that can be executed in a predetermined section from a plurality of automatic driving functions.
- the automatic driving support device includes an automatic driving control unit that performs automatic driving of the vehicle based on the peripheral information acquired by the peripheral information acquiring unit, and the second information Is information related to the object detected by the peripheral information acquisition unit in order to perform the automatic driving.
- the automatic driving support device can suitably determine the degree of functions related to automatic driving that can be realized in a predetermined section.
- the automatic driving support device includes an automatic driving control unit that performs automatic driving of the vehicle based on the peripheral information acquired by the peripheral information acquiring unit, and the second acquisition
- the unit acquires the second information in the section corresponding to the current position of the vehicle
- the determination unit determines the degree of the function related to automatic driving that can be realized by the vehicle in the section corresponding to the current position.
- the automatic operation control unit determines the function and degree of automatic operation to be executed in the section corresponding to the current position based on the determination result by the determination unit.
- the automatic driving support device can execute the automatic driving by determining the function and degree of the automatic driving that can be executed in the section in which the vehicle is currently traveling.
- the automatic driving support device includes a first acquisition unit that acquires or stores first information related to a type or performance of a peripheral information acquisition unit that acquires information around the vehicle; Based on the second acquisition unit for acquiring the second information regarding the road in the section, and the first information and the second information, the degree of the function related to the automatic driving that can be realized by the vehicle in the predetermined section is determined.
- a determination unit In general, the function and degree of automatic driving that can be realized vary depending on the type and performance of the peripheral information acquisition unit. Therefore, in this aspect, the automatic driving assistance device can suitably determine the degree of functions related to automatic driving that can be realized in the predetermined section based on the first information and the second information.
- the automatic driving assistance device includes a route search unit that searches for a route candidate to a destination designated by an external input, and a recommendation for selecting a recommended route from the route candidates.
- a route determination unit wherein the second acquisition unit acquires second information corresponding to each section included in the candidate, and the determination unit is configured to detect the vehicle in each section included in the candidate.
- the degree of function relating to realizable automatic driving is determined, and the recommended route determination unit selects the recommended route based on the determination result by the determination unit.
- the automatic driving support device can suitably select the recommended route in consideration of the degree of each function of automatic driving in each section.
- the automatic driving support device includes a first acquisition unit that acquires or stores first information related to the degree of functions related to automatic driving that can be performed by the vehicle, and a predetermined section. A function related to automatic driving that can be realized by the vehicle in the predetermined section for each function of automatic driving based on a second acquisition unit that acquires second information related to a road, and the first information and the second information. And a determination unit for determining the degree of.
- the automatic driving support device takes into consideration the level of functions related to automatic driving that can be performed by the vehicle, and suitably determines the level of functions related to automatic driving that the vehicle can realize in a predetermined section for each function of automatic driving. can do.
- a control method executed by the automatic driving support device executed by the automatic driving support device, the first information regarding the peripheral information acquisition unit for acquiring information about the vehicle periphery or information about the vehicle state, and a predetermined information
- the automatic driving support device can suitably determine the degree of functions related to automatic driving that can be realized in a predetermined section for each function of automatic driving.
- a program executed by a computer the first information about a peripheral information acquisition unit that acquires information about the vehicle periphery or information about the state of the vehicle, and a predetermined section, Based on the second information related to the road, the computer is caused to function as a determination unit that determines the degree of the function related to the automatic driving that can be realized by the vehicle in the predetermined section for each function of the automatic driving.
- the computer can suitably determine the degree of functions related to automatic driving that can be realized in a predetermined section for each function of automatic driving.
- the program is stored in a storage medium.
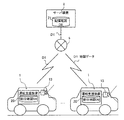
- FIG. 1 is a schematic configuration of an automatic driving system according to the present embodiment.
- the automatic driving system includes a driving support device 1 that moves together with each vehicle, and a server device 2 that communicates with each driving support device 1 via a network 9. Then, the automatic driving system suitably causes the driving support device 1 to execute a route search that considers whether or not each function related to automatic driving can be executed and an automatic driving according to the road conditions during traveling.
- the driving support device 1 is a stationary driving support device or a mobile terminal such as a smartphone, and acquires map data “D1” of the area from the distribution map DB 21 of the server device 2 according to the area to which the vehicle position belongs. And it memorize
- the driving support device 1 performs automatic driving in which a part or all of the driving operation is performed semi-automatically or fully automatically based on the output of the sensor 13 constituted by a camera or the like.
- the driving support device 1 determines whether or not the automatic driving can be performed for each driving function to be automated (also referred to as “automatic driving function Fc”).
- Each automatic driving function Fc has a level (also referred to as “automation level Lv”) according to the degree of automation, and the driving support apparatus 1 can execute an automatic level Lv that can be executed for each automatic driving function Fc.
- the automatic driving and the route search are performed based on the determination result.
- the driving support device 1 is an example of the “automatic driving support device” in the present invention.
- the automatic driving function Fc includes, for example, a lane keeping function (LKA: Lane Keeping Assist), an automatic steering function, a speed adjustment function, and the like.
- the automation level Lv is, for example, level 1 when only warning or notification is performed, level 2 when operation related to the function is temporarily automated under a predetermined condition, and operation related to the function is fully automatic. The higher the level, such as level 3, the higher the function.
- the server device 2 stores the distribution map DB 21 and, in response to a request from the driving support device 1, extracts map data D1 corresponding to an area where the requesting driving support device 1 exists from the distribution map DB 21 and transmits it. .
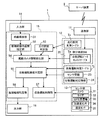
- FIG. 2 is a block diagram illustrating a functional configuration of the driving support device 1.
- the driving support device 1 mainly includes a communication unit 11, a storage unit 12, a sensor unit 13, an input unit 14, a control unit 15, and an output unit 16.
- the communication unit 11 acquires the map data D1 from the server device 2 based on the control of the control unit 15, and registers the acquired map data D1 in the partial map DB 20. In this case, for example, when the communication unit 11 that acquires the map data is scheduled to enter or approaches an area in which the map data is not registered in the partial map DB 20, information specifying the area is given to the server device 2. By transmitting, the map data D1 of the above-mentioned area is acquired. Further, the communication unit 11 acquires weather information from a server device that distributes weather information based on the control of the control unit 15.
- the storage unit 12 stores a program executed by the control unit 15 and information necessary for the control unit 15 to execute a predetermined process.
- the storage unit 12 stores a partial map DB 20 including an automatic driving data element table Te, sensor information 23, automatic driving correspondence information 24, a road section conversion table Tc, and an automatic driving determination table Tj. To do.
- Sensor information 23 is information representing the type and performance of each sensor of the sensor unit 13.
- the sensor information 23 is, for example, information in which a hardware ID that is identification information of each sensor of the sensor unit 17 is associated with sensor type information and performance information indicated by the hardware ID.
- the sensor information 23 is an example of “first information” in the present invention.
- the automatic driving correspondence information 24 is information indicating the automatic driving function Fc supported by the vehicle on which the driving support device 1 is mounted and its automation level Lv.
- the automatic driving correspondence information 24 is incorporated in an automatic driving determination table Tj described later.
- the automatic driving correspondence information 24 is an example of “first information” in the present invention.
- the automatic driving data element table Te is a table in which information related to roads (also referred to as “road element information Ie”) necessary to determine the automation level Lv of each automatic driving function Fc that can be executed for each road section is registered. It is.
- the road section described above indicates a unit section arbitrarily dividing a road, and may correspond to, for example, a link representing a road on map data.
- the road section conversion table Tc is a table that defines a range of latitude and longitude corresponding to each road section and lane.
- the automatic driving determination table Tj is a table for determining the automation level Lv of each automatic driving function Fc that can be executed based on the road element information Ie and the sensor information 23 corresponding to the road section to be determined for automatic driving. is there. Data structures of the automatic driving data element table Te, the road section conversion table Tc, and the automatic driving determination table Tj will be described later.
- the storage unit 12 is an example of the “first acquisition unit” in the present invention.
- the sensor unit 13 includes an internal sensor for detecting the state of the vehicle and an external sensor for recognizing the surrounding environment of the vehicle, and includes a camera 31 and a lidar (LIDAR: Laser Illuminated Detection And Ranging) (or radar). 32, a GPS receiver 33, an acceleration sensor 34, a speed sensor 35, and the like.
- the camera 31 generates a colored image representing the situation of the outside world.
- the lidar 32 discretely measures the distance to an object existing in the outside world, and recognizes the position of the object as a three-dimensional point group.
- the GPS receiver 33 generates latitude and longitude position information representing the current vehicle position.
- the acceleration sensor 34 detects the acceleration of the vehicle.
- the speed sensor 35 detects the speed of the vehicle.
- the sensor unit 13 may include an inertial measurement unit (IMU), a gyro sensor, and the like for recognizing the posture (orientation) of the vehicle and correcting the acquisition data of other sensors.
- the sensor unit 13 may include a sensor that measures a weather condition such as a raindrop sensor (rain sensor) or a fog sensor.
- the control unit 15 determines the current weather state based on the output of the sensor unit 13 in addition to or instead of the weather information acquired from the communication unit 11, and generates weather information.
- the sensor unit 13 is an example of the “peripheral information acquisition unit” in the present invention.
- the input unit 14 is a button operated by the user, a touch panel, a remote controller, a voice input device, and the like, and receives an input for specifying a destination for route search, an input for specifying on / off of automatic driving, and the like. . Further, the input unit 14 may receive information (for example, whether a driver's license is present, driving skill, etc.) related to the driving ability of the person who gets on the vehicle. The information received by the input unit 14 may be stored in the storage unit 12 based on the control of the control unit 15.
- control part 15 performs the personal authentication of a driver
- the control unit 15 acquires an ID or the like for identifying the driver by biometric authentication or reading of a personal IC card or the like, and stores information associated with the individual such as driving operation history information or license acquisition information.
- a request signal specifying an ID acquired by biometric authentication or the like is transmitted by the communication unit 11 to the server device to be managed.
- the control part 15 receives the information regarding the driver
- the control part 15 may acquire the information regarding a driving capability electronically.
- the control unit 15 includes a CPU that executes a program and controls the entire driving support device 1.
- the control unit 15 executes a process of searching for a recommended route in consideration of the automation level Lv of the automatic driving function Fc that can be executed in each road section (also referred to as “route search process”). Further, the control unit 15 recognizes the automated level Lv of the automated driving function Fc that can be executed in the road section in which the vehicle is traveling, and performs the automated driving according to the automated level Lv (also referred to as “automated driving process”). )).
- the control unit 15 includes a route search unit 51, a candidate route segment designation unit 52, a travel segment determination unit 53, a road element information extraction unit 54, an automatic driving function determination unit 55, a recommended route identification unit 56, And an automatic operation control unit 57.
- the route search unit 51 searches for a guide route candidate (also referred to as “candidate route”) from the current position to the destination.
- the route search unit 51 searches for a plurality of candidate routes based on conditions other than those relating to automatic driving.
- the candidate route section designation unit 52 recognizes each road section belonging to the candidate route searched by the route search unit 51 and supplies the recognized road section identification information to the road element information extraction unit 54.
- the travel section determination unit 53 determines the road section (““ current position information ”) indicating the current position recognized based on the output of the sensor unit 13 and the information such as the partial map DB 20 (“ current position information ”). And a lane (also referred to as “traveling lane”). Then, the travel section determination unit 53 supplies the recognized travel section and travel lane information to the road element information extraction unit 54.
- the road element information extraction unit 54 refers to the automatic driving data element table Te, and extracts the road element information Ie corresponding to the road section of each candidate route specified by the candidate route section specifying unit 52. Similarly, when the road element information extraction unit 54 receives information specifying the travel section and the travel lane from the travel section determination unit 53, the road element information extraction unit 54 automatically selects the road element information Ie corresponding to the designated travel section and the travel lane. Extracted from the operation data element table Te. Then, the road element information extraction unit 54 transmits the extracted road element information Ie information and the like to the automatic driving function determination unit 55.
- the road element information extraction unit 54 is an example of a “second acquisition unit” in the present invention, and the road element information Ie is an example of “second information” in the present invention.
- the automatic driving function determination unit 55 refers to the automatic driving determination table Tj, and based on the road element information Ie received from the road element information extraction unit 54 and the type of sensor indicated by the sensor information 23, each road section of the candidate route Alternatively, a set of the automatic driving function Fc and the automation level Lv that can be executed in the traveling section is determined. Further, the automatic driving function determination unit 55 may determine only at least one of the automatic driving function Fc that can be executed in each road section or traveling section of the candidate route or the automation level Lv of the predetermined automatic driving function Fc. .
- the automatic driving function determination unit 55 may determine for each lane corresponding to each road section or traveling section of the candidate route depending on the data structure of the automatic driving determination table Tj and the road element information Ie received from the road element information extraction unit 54. In addition, a set of the automatic driving function Fc and the automation level Lv that can be executed may be determined. Further, the automatic driving function determination unit 55 determines a set of the automatic driving function Fc and the automation level Lv that can be executed in consideration of weather information indicating the weather in each road section or traveling section of the corresponding candidate route. It may be. In this case, for example, when the weather is predicted to be bad, the automation level Lv may be determined to be lower than when the weather is predicted to be good.
- the automatic driving function determination unit 55 does not identify the autonomous driving vehicle lane as each road section or traveling section of the corresponding candidate route.
- the automation level Lv may be determined to be higher than the case.
- the automatic driving function determination unit 55 further considers the information regarding the driving capability and can execute the automatic driving function Fc and You may make it determine the group of the automation level Lv. For example, when the driving ability of the passenger is low, control with the automation level Lv of level 3 or lower may be prohibited, and only control with the automation level Lv of level 4 may be executed. Then, the automatic driving function determination unit 55 supplies the recommended route specifying unit 56 with the determination result regarding the automatic driving function Fc and the automation level Lv that can be executed in each road section of the candidate route.
- the automatic driving function determination unit 55 supplies the determination result of the automation level Lv that can be executed by each automatic driving function Fc in the traveling section to the automatic driving control unit 57.
- the automatic driving function determination unit 55 is an example of the “determination unit” in the present invention.
- the recommended route specifying unit 56 determines a recommended route to be presented to the user based on the determination result of the automation level Lv in each road section of the candidate route by the automatic driving function determining unit 55.
- the recommended route specifying unit 56 may set, as the recommended route, the candidate route having the largest average number of executable automatic driving functions Fc among the candidate routes.
- the recommended route specifying unit 56 may set the candidate route having the highest average of the automation levels Lv of the automatic driving function Fc specified by the user through the input unit 14 among the candidate routes as the recommended route. Good. Then, the recommended route specifying unit 56 causes the output unit 16 to display information on the set recommended route.
- the automatic driving control unit 57 performs automatic driving of the vehicle using the output information of the sensor unit 13 based on the set route.
- the automatic driving control unit 57 determines the automatic driving function Fc that can be executed in the current travel section and the corresponding automation level Lv based on the determination result by the automatic driving function determination unit 55. Then, for example, the recommended route specifying unit 56 executes the executable automatic driving function Fc at the highest level among the executable automation levels Lv.
- the output unit 16 is, for example, a display or a speaker, and outputs information necessary for guiding the route to the set destination.
- the output unit 16 displays the recommended route specified by the recommended route specifying unit 56. And when the input to start guidance by the recommended route displayed by the output unit 16 is made to the input unit 14, the driving support device 1 starts automatic driving by the recommended route.
- FIG. 3A shows an example of the data structure of the road section conversion table Tc.
- the current position information, the road segment information indicating the road segment existing at the position indicated by the current position information, and the lane existing at the position indicated by the current position information are displayed. At least the lane information to be represented is associated.
- the travel section determination unit 53 refers to the road section conversion table Tc shown in FIG. 3A, so that the vehicle exists based on the current position information indicating the current position acquired from the sensor unit 13 and the partial map DB 20. Recognize the travel section and travel lane.
- FIG. 3B shows an example of the data structure of the automatic operation data element table Te.
- road section information In the automatic driving data element table Te shown in FIG. 3B, road section information, lane information, road element information Ie, and road attribute information described later are associated at least.
- the road attribute information is information indicating the state of the road in the corresponding road section, and includes, for example, information such as height difference in the road section, average bank angle, road surface condition (such as gravel road or paved road).
- the road element information extraction unit 54 refers to the automatic driving data element table Te shown in FIG. 3B, so that the road corresponding to the road section specified by the candidate route section specifying section 52 or the travel section determination section 53 is obtained. Element information Ie, road attribute information, and the like are extracted.
- FIG. 3C shows an example of the data structure of the road element information Ie associated with a certain road section.
- the road element information Ie shown in FIG. 3 (C) includes a “category” item indicating a classification of road information used for whether automatic driving is permitted, a “subcategory” item further classifying each category, and a subcategory It has an item of “presence / absence” indicating presence / absence of information to be displayed or an object, and an item of “attribute information” indicating detailed information of the information or the object indicated by the subcategory.
- some of the items of “attribute information” shown in FIG. 3C exemplify the types of information that can be registered in the attribute information. Specific information is registered.
- the road element information Ie includes information such as a color, a line type, and a width as attribute information corresponding to the center line and the road shoulder line existing in the target road section.
- the road element information Ie includes information on the number of lanes as attribute information of the subcategory “number of lanes”.
- the category “Landmark information” has four subcategories, and among them, a power pole and a road sign exist in the target road section.
- the road element information Ie includes, as attribute information corresponding to the subcategory “electric pole”, the position, height, width, average interval, etc. of the electric pole, and the attribute corresponding to the subcategory “road sign”
- the information includes information indicating the type of road sign.
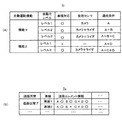
- FIG. 4A shows an example of the data structure of the automatic driving determination table Tj.
- each item of “vehicle type correspondence”, “use sensor”, and “application condition” is associated with each automation level Lv of the automatic driving function Fc.
- the item “corresponding to the vehicle type” is an item generated based on the automatic driving correspondence information 24, and whether or not there is a correspondence to each set of the automatic driving function Fc and the automation level Lv of the vehicle on which the driving support device 1 is mounted.
- the item “used sensor” indicates a sensor used when executing a set of the corresponding automatic driving function Fc and automation level Lv.
- the item “applicable condition” indicates a condition relating to road element information Ie necessary for executing a set of the corresponding automatic driving function Fc and automation level Lv.
- conditions relating to the road element information Ie are abstracted by alphabets (A to D in this case).
- the automatic driving function Fc a function ⁇ having three levels of automation levels Lv and a function ⁇ having two levels of automation levels Lv are defined.
- driving assistance is provided. It shows that the vehicle of the apparatus 1 corresponds to all levels of function ⁇ and level 2 of function ⁇ .
- FIG. 4B shows an automatic driving data element table Te obtained by abstracting the road element information Ie as in FIG.
- FIG. 4B it is assumed that there are four sub-categories A to D of the road element information Ie, and whether or not there is a correspondence for each sub-category (that is, information on the item “presence / absence” in FIG. 3C)) Is represented by “ ⁇ ” or “ ⁇ ”.
- the automatic driving function determination unit 55 when targeting the lane 1 of the road section a, refers to the automatic driving data element table Te, and each sub category A, B, D exists in the road element information Ie. , Recognize that subcategory C does not exist. Therefore, the automatic driving function determination unit 55 refers to the automatic driving determination table Tj in FIG. 4A and determines that the levels 1 and 2 of the function ⁇ and the level 1 of the function ⁇ satisfy the application condition. Further, the automatic driving function determination unit 55 recognizes from the sensor information 23 that the sensor unit 13 includes the camera 31 and the lidar 32, and detects a sensor capable of executing the level 1 and 2 of the function ⁇ and the level 1 of the function ⁇ . Is determined to have.
- the automatic driving function determination unit 55 determines that the level 1 of the function ⁇ cannot be executed because the vehicle does not correspond to the level 1 of the function ⁇ . Accordingly, the automatic driving function determination unit 55 determines that the levels 1 and 2 of the function ⁇ can be executed in the lane 1 of the road section a. Therefore, when driving on the lane 1 of the road section A, the automatic operation control unit 57 executes the level 2 of the function ⁇ having a high degree of automation, for example.
- the automatic driving function determination unit 55 refers to the automatic driving data element table Te, and each sub category A and D exists in the road element information Ie. It is recognized that subcategories B and C do not exist. Therefore, the automatic driving function determination unit 55 refers to the automatic driving determination table Tj in FIG. 4A and determines that the level 1 of the function ⁇ and the level 1 of the function ⁇ satisfy the application condition. In addition, since the automatic driving function determination unit 55 includes the camera 31 and the lidar 32 as the sensor unit 13, the automatic driving function determination unit 55 determines that the sensor has a sensor capable of executing the level 1 of the function ⁇ and the level 1 of the function ⁇ .
- the automatic driving function determination unit 55 determines that the level 1 of the function ⁇ cannot be executed because the vehicle does not correspond to the level 1 of the function ⁇ . Therefore, the automatic driving function determination unit 55 determines that the level 1 of the function ⁇ can be executed in the lane 1 of the road section a. Therefore, the automatic operation control unit 57 executes the level 1 of the function ⁇ when traveling on the lane 1 of the road section a.
- the automatic driving function determination unit 55 determines a recommended route by regarding any lane from lanes that can pass within each road section of the candidate route as a lane that passes when the target candidate route is used. May be. In another example, the automatic driving function determination unit 55 determines whether the lane having the most available automatic driving function Fc among the lanes that can pass within the target road section or the automation level Lv of the available automatic driving function Fc. A recommended route may be selected by regarding a high lane as a lane that passes when a candidate route of interest is used.
- FIG. 5 is a flowchart showing the procedure of route search processing executed by the driving support device 1.
- the driving assistance device 1 receives an input for designating a destination through the input unit 14 (step S101). Then, the route search unit 51 of the driving support device 1 searches for a candidate route to the input destination (step S102). In this case, for example, the route search unit 51 searches for a predetermined number of candidate routes in consideration of general conditions (for example, distance, fee, etc.) other than the conditions relating to whether automatic driving is possible. Then, the road element information extraction unit 54 acquires road element information Ie corresponding to each road section of the candidate route searched by the route search unit 51 by extracting it from the automatic driving data element table Te (step S103).
- general conditions for example, distance, fee, etc.
- the automatic driving function determination unit 55 refers to the road element information Ie acquired by the road element information extraction unit 54, the sensor information 23, and the automatic driving determination table Tj stored in the storage unit 12, and the candidate route A set of the automatic driving function Fc and the automation level Lv that can be executed in each road section is recognized (step S104).
- the recommended route specifying unit 56 selects a recommended route to be presented to the user from the candidate routes based on the determination result in step S104, and presents the recommended route to the user by the output unit 16 (step S105).
- the recommended route specifying unit 56 selects, as the recommended route, a candidate route including a road section having a large number of executable automatic driving functions Fc or having a high automation level Lv of the automatic driving function Fc to be executed.
- the driving support device 1 sets a recommended route as a guide route to the destination based on a user input, and starts automatic driving based on the guide route.
- the driving assistance device 1 can preferentially guide a route with less burden on the driving operation of the user.
- FIG. 6 is a flowchart showing the procedure of the automatic driving process executed by the driving support device 1.
- the travel section determination unit 53 refers to the road section conversion table Tc from the current position information obtained by the sensor unit 13 and the partial map DB 20 and recognizes the travel section and the travel lane in which the vehicle is traveling. (Step S201). Then, the road element information extraction unit 54 acquires the road element information Ie corresponding to the travel section and the lane specified in step S201 by extracting it from the automatic driving data element table Te (step S202).
- the automatic driving function determination unit 55 refers to the road element information Ie acquired by the road element information extraction unit 54, the sensor information 23, and the automatic driving determination table Tj stored in the storage unit 12, and is currently traveling.
- a set of the automatic driving function Fc and the automation level Lv that can be executed in the travel section and the lane is recognized (step S203).
- the automatic operation control unit 57 performs the automatic operation by executing the automatic operation function Fc determined to be executable in step S203 with the executable automation level Lv (step S204).
- the automatic driving control unit 57 may execute the automatic driving function Fc with the highest automation level Lv.
- the driving support device 1 performs automatic driving based on the output of the sensor unit 13 that acquires information on the periphery of the vehicle or information on the state of the vehicle.
- the automatic driving determination table Tj based on 24 etc. is stored. Then, the driving support device 1 refers to the automatic driving determination table Tj, and based on the sensor information 23 about the sensor unit 13 and the road element information Ie about the road in the predetermined road section, the vehicle in the predetermined road section described above Is determined to determine a set of the automatic driving function Fc and the automation level Lv.
- the driving assistance apparatus 1 can recognize suitably the group of the automatic driving function Fc and the automation level Lv which can implement
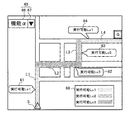
- FIG. 7 is an example of the display of the driving support device 1 after the determination of the guide route.
- the destination received in S101 of the route search process described above is the point G
- the departure point in the route search (the current position or a point designated as the departure point) is S.
- the recommended route determined in S105 is the roads L1, L2, L3, and L4.
- FIG. 7 shows the automation level Lv that the vehicle can execute on each road when the automatic driving function Fc is the function ⁇ .
- the control unit 15 displays the roads L1 to L4 constituting the recommended route in a display mode corresponding to the automation level Lv executable on each road.
- the executable automation level Lv on the road L1 and the road L4 is level 1
- the executable automation level Lv on the road L3 is level 2
- the executable automation level Lv on the road L2 is level 3.
- the control unit 15 displays the roads L1 to L4 constituting the recommended route in darker color as the executable automation level Lv is higher.
- control unit 15 may change the color of the road or lane that constitutes the recommended route according to the automation level Lv. That is, the control unit 15 may clearly indicate the automation level Lv of each road or lane constituting the recommended route on the map so that the observer can visually recognize the automation level Lv.
- control unit 15 displays the executable automation level Lv as text 61 to 64 in association with each of the roads L1 to L4 constituting the recommended route.
- control unit 15 provides an area 68 indicating which automation level Lv each color (darkness) corresponds to in the lower right.
- the control unit 15 may display the balloons 61 to 64 or the area 68 at the same time, or may display any one of them.
- control unit 15 may switch the automatic driving function Fc that should display the executable automation level Lv by the user's operation.
- the control unit 15 includes a display field 66 for displaying the currently set automatic driving function Fc (function ⁇ in FIG. 7) and a button 67 for selecting the automatic driving function Fc to be set.
- a select box 65 is displayed.
- the control unit 15 switches to another corresponding automatic driving function Fc. Then, the control unit 15 switches the display of the automation level Lv of each of the roads L1 to L4 constituting the recommended route according to the switched automatic driving function Fc.
- the block configuration in FIG. 2 is an example, and the block configuration to which the present invention is applicable is not limited to this.
- the server device 2 may determine a set of an executable automatic driving function Fc and an automation level Lv.
- the server device 2 stores in advance an automatic driving data element table Te and an automatic driving determination table Tj that defines conditions regarding the road element information Ie for each set of the automatic driving function Fc and the automation level Lv. Further, the server device 2 receives the sensor information 23 and the automatic driving correspondence information 24 from the driving support device 1. When the server device 2 receives a route search request designating a destination from the driving support device 1, the server device 2 searches for a candidate route. Then, the server device 2 uses the received sensor information 23 and the automatic driving correspondence information 24, the road element information Ie corresponding to the target road section, and the automatic driving determination table Tj for the road sections of each candidate route.
- the server device 2 Based on this, a set of the automatic driving function Fc and the automation level Lv that can be executed in the target road section is determined. Then, the server device 2 performs a process similar to the recommended route specifying unit 56 of the embodiment based on the above determination result, thereby determining a recommended route, and using the determined recommended route information as a route search request source. To the driving support apparatus 1 of FIG. In this case, the driving assistance device 1 displays the recommended route based on the information received from the server device 2.
- the server device 2 receives position information indicating the current position from the driving support device 1, and a vehicle on which the driving support device 1 is mounted in a road section and a lane corresponding to the current position can be executed.
- the automatic driving function Fc and the automation level Lv are determined.
- the server device 2 transmits information on the automatic driving function Fc and the automation level Lv that can be executed to the driving support device 1.
- the driving support apparatus 1 executes the executable automatic driving function Fc with the executable automation level Lv based on the information received from the server apparatus 2.
- the server device 2 functions as an “automatic driving support device” in the present invention
- the CPU of the server device 2 is the “first acquisition unit”, “second acquisition unit”, It functions as a “determination unit” and a computer that executes the program of the present invention.
- the processing of the server device 2 in this modification may be executed by a server system composed of a plurality of server devices.
- each server appropriately receives information necessary for executing a process assigned in advance from another server and executes a predetermined process.
- the server system is an example of the “automated driving support device” in the present invention.
- the driving support device 1 may acquire and hold the automatic driving data element table Te separately from the partial map DB 20.
- the driving support device 1 may store in advance the automatic driving data element table Te corresponding to all road sections, and at a timing different from the timing of acquiring the map data D1 from the server device 2.
- the automatic operation data element table Te may be acquired from the server device 2.
- the type of sensor required for execution of each automation level Lv of the automatic driving function Fc is defined in the item “used sensor”.
- the automatic driving determination table Tj may further define the performance of the sensor necessary for executing each automation level Lv of the automatic driving function Fc.
- the automatic driving determination table Tj includes an item for defining necessary performance information for each sensor specified in the “use sensor” item. For example, when a camera is registered in the item “used sensor”, information on necessary camera performance (for example, the number of pixels and the angle of view) is recorded in the item defining the performance information. Then, the automatic driving function determination unit 55 of the driving support device 1 determines whether the automatic driving function Fc can be executed or not, based on the performance information of each sensor unit 13 included in the sensor information 23, the automatic driving function Fc that can be executed. And a set of automation levels Lv.
- the driving support device 1 may display each candidate route by changing the display mode for each road section so that the automatic driving function Fc that can be executed for each road section of each candidate route can be identified. Further, the driving support device 1 may further change the display mode for each executable automation level Lv so that the executable automation level Lv can be identified. In this case, when there are a plurality of executable automation levels Lv, the driving support device 1 determines the display mode by adjusting the standard to the highest level among them, for example. Then, the driving assistance device 1 sets one candidate route selected by the user from each displayed candidate route as a guide route, and starts route guidance.
- the driving support device 1 may receive and store all data of the distribution map DB 21 from the server device 2 instead of receiving the map data D1 corresponding to a part of the distribution map DB 21.
- the driving support device 1 may store the distribution map DB 21 at a predetermined time in advance and receive only data necessary for updating from the server device 2.
- the driving support device 1 makes an inquiry to the server device 2 regarding whether or not the stored map data needs to be updated at predetermined time intervals, and appropriately downloads data necessary for the update from the server device 2.
- the automatic driving function determination unit 55 communicates with the sensor unit 13 to thereby determine the type of sensor provided in the sensor unit 13, etc. Information may be acquired.
- the automatic driving correspondence information 24 is incorporated in the automatic driving determination table Tj as an item “car type correspondence”. Instead of this, the automatic driving correspondence information 24 may not be incorporated in the automatic driving determination table Tj.
- the driving support device 1 refers to the automatic driving correspondence information 24 and recognizes a set of the automatic driving function Fc and the automation level Lv that can be supported by the vehicle on which the driving support device 1 is mounted.
- the automatic driving determination table Tj may not have the items “vehicle type correspondence” and “use sensor”. That is, in the automatic driving determination table Tj, a set of the automatic driving function Fc and the automation level Lv that the vehicle does not support, and a set of the automatic driving function Fc and the automation level Lv that require a sensor that the sensor unit 13 does not have are excluded in advance. May be.
- the automatic driving determination table Tj is generated based on the sensor information 23 and the automatic driving correspondence information 24, and the application of the set of the automatic driving function Fc and the automation level Lv whose execution is changed depending only on the road element information Ie. Define the conditions.
- step S105 of FIG. 5 the control unit 15 searches for a recommended route for each automatic driving level set based on the set of the automatic driving function Fc and the automation level Lv that can be executed, and guides the guidance route from the recommended route for each automatic driving level.
- the user may select a recommended route to be set as
- FIG. 8 shows a display example of the route selection screen displayed in step S105 of FIG.
- the destination accepted in S ⁇ b> 101 of the route search process described above is the point G, and the departure point in the route search (the current position or a point designated as the departure point) Is S.
- the control unit 15 searches for the recommended routes 1 to 3 corresponding to the automatic driving levels “high”, “medium”, and “low”, and displays the recommended routes 1 to 3 on the map. At the same time, detailed explanations such as the travel distance of each of the recommended routes 1 to 3 are displayed on the window 69.
- the control unit 15 detects that any of the recommended routes 1 to 3 is selected by operating the input unit 14 such as a touch panel, the control unit 15 sets the selected recommended route as a guide route.
- the control unit 15 selects a candidate route including a road section in which the function ⁇ of the automatic driving function Fc can be driven at the level “Z” as a candidate route having an automatic driving level “high”,
- Candidate routes composed of road sections capable of traveling with function ⁇ at level “X” (Z> X) are candidate routes with automatic driving level “medium”, and function ⁇ of automatic driving function Fc can be driven with level X
- Candidate routes composed of road sections are regarded as candidate routes having an automatic driving level of “low”.
- the control unit 15 stores in advance a table or the like indicating a set of the automatic driving function Fc and the automation level Lv, which is a requirement for authorizing each automatic driving level, and refers to the table to automatically drive each candidate route. The level may be determined. Then, the control unit 15 selects the most recommended candidate route as the recommended route 1 in consideration of other conditions such as the required time and travel distance among the candidate routes having the automatic driving level “high”. Similarly, the control unit 15 selects the recommended route 2 from the candidate routes having the automatic driving level “medium”, selects the recommended route 3 from the candidate routes having the automatic driving level “low”, and selects the recommended routes 1 to 3 is displayed on the screen in a selectable manner.
- the control unit 15 may preferentially display recommended routes with good conditions that are important to the user. For example, when there is a setting or input for giving priority to the automatic driving level, the control unit 15 recommends the route of the driving distance “201 km” of the automatic driving level “high” as shown in the display example of FIG. The route 1 is displayed at the top, and the route of the automatic driving level “medium” traveling distance “180 km” is displayed as the recommended route 2, and the route of the automatic driving level “low” traveling distance “160 km” is displayed as the recommended route 3. In another example, when there is a setting or input indicating that the travel distance is prioritized, the control unit 15 displays the recommended routes in the order from the shortest travel route.
- the control unit 15 displays the route of the driving distance “160 km” of the automatic driving level “low” at the top as the recommended route 1 and the driving of the automatic driving level “medium”.
- a route with a distance “180 km” is displayed as a recommended route 2
- a route with a travel distance “201 km” at an automatic driving level “high” is displayed as a recommended route 3.
- the control unit 15 may search for a route that can always execute the set of the automatic driving function Fc and the automation level Lv specified by the user as the recommended route.
- step S101 the control unit 15 accepts an input for designating a destination and an input for designating a desired combination of the automatic driving function Fc and the automation level Lv. Then, after recognizing the combination of the automatic driving function Fc and the automation level Lv that can be executed in each road section of each candidate route in step S104, the control unit 15 sets the automatic driving function Fc and the automation level Lv specified by the user input.
- Candidate routes consisting of road sections that can execute the set are selected as recommended routes.
- the control unit 15 performs the same route as in (Modification 8).
- a selection screen may be displayed to allow the user to select one route as a guide route from a plurality of corresponding candidate routes.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Evolutionary Computation (AREA)
- Business, Economics & Management (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Atmospheric Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Instructional Devices (AREA)
Abstract
運転支援装置1は、車両周辺の情報又は車両の状態に関する情報を取得するセンサ部13の出力に基づき自動運転を行うものであって、自動運転対応情報24等に基づいた自動運転判定テーブルTjを記憶する。そして、運転支援装置1は、自動運転判定テーブルTjを参照し、センサ部13に関するセンサ情報23と、所定の道路区間における道路に関する道路エレメント情報Ieとに基づいて、上述の所定の道路区間において実行可能な自動運転機能Fc及び自動化レベルLvの組を判定する。
Description
本発明は、自動運転の技術に関する。
従来から、車両の走行を自動制御する所謂自動運転の技術が知られている。自動運転を実行する場合には、例えば、カメラなどの外界センサを用いて、白線や前方車両などの自車両周辺の情報を認識することや、加速度センサやジャイロ等の内界センサを用いて車両の姿勢や状態を把握する必要がある。特許文献1には、車両に設置されたカメラの画像等に基づいて走行中の車線や静止物標を認識する技術が開示されている。
車両自体が自動運転のためのセンサを備えていたとしても、そのセンサの認識の対象となる「対象物」が存在しないような場所、あるいは存在したとしても検出できないような状況においては、そのセンサを活用した、自動運転を実行することができない。例えば、白線等が存在しない道路区間では、白線情報を車両の制御に利用する類の自動運転を実行できない。また、自動運転の機能や程度によって、必要なセンサの種類や精度が異なる。従って、実行可能な自動運転の機能や程度が車両ごとに異なることになる。これらの問題点について、特許文献1は何ら開示していない。
本発明は、上記のような課題を解決するためになされたものであり、実行可能な自動運転の機能及び程度を好適に判定することが可能な自動運転支援装置を提供することを主な目的とする。
請求項に記載の発明は、車両周辺の情報又は車両の状態に関する情報を取得する周辺情報取得部に関する第1情報を取得又は記憶する第1取得部と、所定の区間における、道路に関する第2情報を取得する第2取得部と、前記第1情報と前記第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定部と、を備えることを特徴とする。
また、請求項に記載の発明は、車両周辺の情報を取得する周辺情報取得部の種類又は性能に関する第1情報を取得又は記憶する第1取得部と、所定の区間における、道路に関する第2情報を取得する第2取得部と、前記第1情報と前記第2情報とに基づいて、前記所定区間において前記車両が実現可能な自動運転に関する機能の程度を判定する判定部と、を備えることを特徴とする。
また、請求項に記載の発明は、車両が実施可能な自動運転に関する機能の程度に関する第1情報を取得又は記憶する第1取得部と、所定の区間における、道路に関する第2情報を取得する第2取得部と、前記第1情報と前記第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定部と、を備えることを特徴とする。
また、請求項に記載の発明は、自動運転支援装置が実行する制御方法であって、車両周辺の情報又は車両の状態に関する情報を取得する周辺情報取得部に関する第1情報と、所定の区間における、道路に関する第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定工程を有することを特徴とする。
また、請求項に記載の発明は、コンピュータが実行するプログラムであって、車両周辺の情報又は車両の状態に関する情報を取得する周辺情報取得部に関する第1情報と、所定の区間における、道路に関する第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定部として前記コンピュータを機能させることを特徴とする。
本発明の好適な実施形態によれば、自動運転支援装置は、車両周辺の情報又は車両の状態に関する情報を取得する周辺情報取得部に関する第1情報を取得又は記憶する第1取得部と、所定の区間における、道路に関する第2情報を取得する第2取得部と、前記第1情報と前記第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定部と、を備える。
本発明における「自動運転」とは、どのような環境下においても運転者が全く運転動作に介入しない「完全な自動運転」のみならず、特定の環境・条件が揃った場合にのみ運転者が運転操作を行う必要のない「一時的な自動運転」も含むものとする。また、本発明における「自動運転」とは、運転者が運転操作を行う場合であっても、運転者の運転負荷を軽減したり、車両の走行の安定性を維持するような目的で、運転の一部(例えば、車両の操舵等)を自動で制御するような「部分的な自動運転」(運転支援機能)も含むものとする。自動運転支援装置は、この態様により、周辺情報取得部に関する第1情報と、道路に関する第2情報とに基づき、自動運転の機能ごとに、所定区間において実現可能な自動運転に関する機能の程度を好適に判定することができる。
上記自動運転支援装置の一態様では、前記判定部は、前記機能の程度ごとに前記第2情報に関する条件を示したテーブル情報に基づいて前記判定を行う。自動運転支援装置は、この態様により、所定区間において実現可能な自動運転に関する機能の程度を的確に判定することができる。
上記自動運転支援装置の他の一態様では、前記判定部は、前記自動運転に関する複数の機能のうち、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する。この態様により、自動運転支援装置は、複数の自動運転の機能から、所定区間において実行可能な機能及び程度を好適に判定することができる。
上記自動運転支援装置の他の一態様では、自動運転支援装置は、前記周辺情報取得部が取得した周辺情報に基づいて、前記車両の自動運転を行う自動運転制御部を備え、前記第2情報は、前記自動運転を行うために前記周辺情報取得部により検出される対象物に関する情報である。一般に、自動運転を行うための対象物がない道路では、自動運転を実行することができない。よって、この態様では、自動運転支援装置は、所定区間において実現可能な自動運転に関する機能の程度を好適に判定することができる。
上記自動運転支援装置の他の一態様では、自動運転支援装置は、前記周辺情報取得部が取得した周辺情報に基づいて、前記車両の自動運転を行う自動運転制御部を備え、前記第2取得部は、前記車両の現在位置に対応する区間における前記第2情報を取得し、前記判定部は、前記現在位置に対応する区間において前記車両が実現可能な自動運転に関する機能の程度の判定を行い、前記自動運転制御部は、前記判定部による判定結果に基づき、前記現在位置に対応する区間において実行する自動運転の機能及び程度を決定する。この態様により、自動運転支援装置は、現在車両が走行中の区間において実行可能な自動運転の機能及び程度を判定して自動運転を実行することができる。
本発明の他の好適な実施形態によれば、自動運転支援装置は、車両周辺の情報を取得する周辺情報取得部の種類又は性能に関する第1情報を取得又は記憶する第1取得部と、所定の区間における、道路に関する第2情報を取得する第2取得部と、前記第1情報と前記第2情報とに基づいて、前記所定区間において前記車両が実現可能な自動運転に関する機能の程度を判定する判定部と、を備える。一般に、周辺情報取得部の種類や性能に応じて、実現可能な自動運転の機能及び程度は異なる。よって、この態様では、自動運転支援装置は、第1情報と第2情報とに基づいて、所定区間において実現可能な自動運転に関する機能の程度を好適に判定することができる。
上記自動運転支援装置の他の一態様では、自動運転支援装置は、外部入力により指定された目的地までの経路の候補を探索する経路探索部と、前記経路の候補から推奨経路を選択する推奨経路決定部と、をさらに有し、前記第2取得部は、前記候補に含まれる各区間に対応する第2情報を取得し、前記判定部は、前記候補に含まれる各区間において前記車両が実現可能な自動運転に関する機能の程度の判定を行い、前記推奨経路決定部は、前記判定部による判定結果に基づき、前記推奨経路を選択する。この態様により、自動運転支援装置は、各区間における自動運転の各機能の程度を考慮して推奨経路を好適に選択することができる。
本発明の他の好適な実施形態によれば、自動運転支援装置は、車両が実施可能な自動運転に関する機能の程度に関する第1情報を取得又は記憶する第1取得部と、所定の区間における、道路に関する第2情報を取得する第2取得部と、前記第1情報と前記第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定部と、を備える。自動運転支援装置は、この態様により、車両が実施可能な自動運転に関する機能の程度を勘案し、自動運転の機能ごとに、所定区間において車両が実現可能な自動運転に関する機能の程度を好適に判定することができる。
本発明の他の好適な実施形態によれば、自動運転支援装置が実行する制御方法であって、車両周辺の情報又は車両の状態に関する情報を取得する周辺情報取得部に関する第1情報と、所定の区間における、道路に関する第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定工程を有する。自動運転支援装置は、この制御方法を実行することで、自動運転の機能ごとに、所定区間において実現可能な自動運転に関する機能の程度を好適に判定することができる。
本発明の他の好適な実施形態によれば、コンピュータが実行するプログラムであって、車両周辺の情報又は車両の状態に関する情報を取得する周辺情報取得部に関する第1情報と、所定の区間における、道路に関する第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定部として前記コンピュータを機能させる。コンピュータは、このプログラムを実行することで、自動運転の機能ごとに、所定区間において実現可能な自動運転に関する機能の程度を好適に判定することができる。好適には、上記プログラムは、記憶媒体に記憶される。
以下、図面を参照して本発明の好適な実施例について説明する。
[自動運転システムの概要]
図1は、本実施例に係る自動運転システムの概略構成である。自動運転システムは、各車両と共に移動する運転支援装置1と、各運転支援装置1とネットワーク9を介して通信を行うサーバ装置2とを備える。そして、自動運転システムは、自動運転に関する各機能の実行可否を考慮した経路探索や、走行中の道路状況に応じた自動運転を好適に運転支援装置1に実行させる。
図1は、本実施例に係る自動運転システムの概略構成である。自動運転システムは、各車両と共に移動する運転支援装置1と、各運転支援装置1とネットワーク9を介して通信を行うサーバ装置2とを備える。そして、自動運転システムは、自動運転に関する各機能の実行可否を考慮した経路探索や、走行中の道路状況に応じた自動運転を好適に運転支援装置1に実行させる。
運転支援装置1は、据置型の運転支援装置又はスマートフォンなどの携帯端末であって、自車位置が属するエリアに応じて、当該エリアの地図データ「D1」をサーバ装置2の配信地図DB21から取得し、部分地図DB20として記憶する。そして、運転支援装置1は、部分地図DB20を参照し、ユーザが設定した目的地への経路探索や、設定された経路に基づく案内等を行う。
また、運転支援装置1は、カメラなどから構成されるセンサ13の出力に基づき、一部又は全部の運転操作を半自動又は全自動で行う自動運転を行う。ここで、運転支援装置1は、自動化する運転機能(「自動運転機能Fc」とも呼ぶ。)ごとに分けて自動運転の実行可否を判定する。各自動運転機能Fcには、自動化の程度に応じたレベル(「自動化レベルLv」とも呼ぶ。)が規定されており、運転支援装置1は、各自動運転機能Fcについて、実行可能な自動化レベルLvを判定し、判定結果に基づき自動運転や経路探索を行う。運転支援装置1は、本発明における「自動運転支援装置」の一例である。
なお、自動運転機能Fcは、例えば、レーンキープ機能(LKA:Lane Keeping Assist)、自動操舵機能、速度調整機能などを含む。自動化レベルLvは、例えば、警告や通知のみを行う場合をレベル1、所定の条件のときに該当の機能に関する運転が一時的に自動化する場合をレベル2、該当の機能に関する運転が全自動となる場合をレベル3、というようにレベルが高いほど高機能となる。
サーバ装置2は、配信地図DB21を記憶し、運転支援装置1からの要求に応じて、要求元の運転支援装置1が存在するエリアに対応する地図データD1を配信地図DB21から抽出して送信する。
[ブロック構成]
図2は、運転支援装置1の機能的構成を表すブロック図を示す。図2に示すように、運転支援装置1は、主に、通信部11と、記憶部12と、センサ部13と、入力部14と、制御部15と、出力部16とを有する。
図2は、運転支援装置1の機能的構成を表すブロック図を示す。図2に示すように、運転支援装置1は、主に、通信部11と、記憶部12と、センサ部13と、入力部14と、制御部15と、出力部16とを有する。
通信部11は、制御部15の制御に基づき、サーバ装置2から地図データD1を取得し、取得した地図データD1を部分地図DB20に登録する。この場合、地図データを取得する通信部11は、例えば、部分地図DB20に地図データが登録されていないエリアに進入予定の場合、又は近付いた場合に、当該エリアを指定する情報をサーバ装置2へ送信することで、上述のエリアの地図データD1を取得する。また、通信部11は、制御部15の制御に基づき、天候情報を配信するサーバ装置等から天候情報を取得する。
記憶部12は、制御部15が実行するプログラムや、制御部15が所定の処理を実行するのに必要な情報を記憶する。本実施例では、記憶部12は、自動運転データエレメントテーブルTeを含む部分地図DB20と、センサ情報23と、自動運転対応情報24と、道路区間変換テーブルTcと、自動運転判定テーブルTjとを記憶する。
センサ情報23は、センサ部13の各センサの種類や性能を表す情報である。センサ情報23は、例えば、センサ部17の各センサの識別情報であるハードウェアIDと、当該ハードウェアIDが示すセンサの種類情報及び性能情報とが関連付けられた情報である。センサ情報23は、本発明における「第1情報」の一例である。自動運転対応情報24は、運転支援装置1を搭載する車両が対応している自動運転機能Fc及びその自動化レベルLvを示す情報である。自動運転対応情報24は、後述する自動運転判定テーブルTjに組み込まれている。自動運転対応情報24は、本発明における「第1情報」の一例である。
自動運転データエレメントテーブルTeは、道路区間ごとに実行可能な各自動運転機能Fcの自動化レベルLvを判定するために必要な道路に関する情報(「道路エレメント情報Ie」とも呼ぶ。)が登録されたテーブルである。上述の道路区間は、任意に道路を区切った単位区間を示し、例えば、地図データ上での道路を表すリンクに対応してもよい。道路区間変換テーブルTcは、各道路区間及び車線に対応する緯度経度の範囲を規定したテーブルである。また、自動運転判定テーブルTjは、自動運転の判定対象の道路区間に対応する道路エレメント情報Ie及びセンサ情報23に基づき、実行可能な各自動運転機能Fcの自動化レベルLvを判定するためのテーブルである。自動運転データエレメントテーブルTe、道路区間変換テーブルTc、及び自動運転判定テーブルTjのデータ構造については後述する。記憶部12は、本発明における「第1取得部」の一例である。
センサ部13は、車両の状態を検出する内界センサ及び車両の周辺環境を認識するための外界センサから構成され、カメラ31と、ライダ(LIDAR:Laser Illuminated Detection And Ranging)(又は/及びレーダ)32と、GPS受信機33と、加速度センサ34と、速度センサ35などを含む。カメラ31は、外界の状況を表す色付きの画像を生成する。ライダ32は、外界に存在する物体までの距離を離散的に測定し、当該物体の位置を3次元の点群として認識する。GPS受信機33は、現在の車両の位置を表す緯度及び経度の位置情報を生成する。加速度センサ34は、車両の加速度を検出する。速度センサ35は、車両の速度を検出する。なお、センサ部13は、車両の姿勢(向きなど)を認識して他のセンサの取得データを補正するための慣性計測装置(IMU:Inertial Measurement Unit)やジャイロセンサなどを備えてもよい。また、センサ部13は、雨滴センサ(レインセンサ)や霧センサなどの天候状態を測定するセンサを含んでもよい。この場合、制御部15は、通信部11から取得する天候情報に加えて、又はこれに代えて、センサ部13の出力に基づき現在の天候状態を判定し、天候情報を生成する。センサ部13は、本発明における「周辺情報取得部」の一例である。
入力部14は、ユーザが操作するためのボタン、タッチパネル、リモートコントローラ、音声入力装置等であり、経路探索のための目的地を指定する入力、自動運転のオン及びオフを指定する入力などを受け付ける。また、入力部14は、乗車した人物の運転能力に関する情報(例えば、運転免許の有無、運転スキル等)を受け付けても良い。また、入力部14が受け付けた情報は、制御部15の制御に基づき、記憶部12に記憶させるようにしてもよい。なお、制御部15は、入力部14へのユーザ入力に基づき運転能力に関する情報を取得する代わりに、認証手段により運転手の個人認証を行い、認証されたユーザに紐付けられた運転能力に関する情報を電子的に取得してもよい。この場合、例えば、制御部15は、生体認証又は個人ICカード等の読み取り等により運転手を特定するID等を取得し、運転操作履歴情報や免許取得情報等の個人と紐付けられた情報を管理するサーバ装置に対し、生体認証等により取得したIDを指定した要求信号を通信部11により送信する。そして、制御部15は、上述のサーバ装置から、要求信号において指定したIDに対応する運転者の運転能力に関する情報等を、通信部11により受信する。このように、制御部15は、運転能力に関する情報を電子的に取得してもよい。
制御部15は、プログラムを実行するCPUなどを含み、運転支援装置1の全体を制御する。本実施例では、制御部15は、各道路区間での実行可能な自動運転機能Fcの自動化レベルLvを考慮した推奨経路を検索する処理(「経路検索処理」とも呼ぶ。)を実行する。また、制御部15は、車両が走行中の道路区間で実行可能な自動運転機能Fcの自動化レベルLvを認識して当該自動化レベルLvに応じた自動運転を行う処理(「自動運転処理」とも呼ぶ。)を実行する。制御部15は、経路探索部51と、候補経路内区間指定部52と、走行区間判定部53と、道路エレメント情報抽出部54と、自動運転機能判定部55と、推奨経路特定部56と、自動運転制御部57とを有する。
経路探索部51は、入力部14により目的地が入力された場合に、現在位置から目的地への案内経路の候補(「候補経路」とも呼ぶ。)を検索する。この場合、例えば、経路探索部51は、自動運転に関する条件以外の条件に基づき、複数の候補経路を検索する。候補経路内区間指定部52は、経路探索部51が検索した候補経路に属する各道路区間を認識し、認識した道路区間の識別情報を、道路エレメント情報抽出部54に供給する。
走行区間判定部53は、センサ部13の出力、及び部分地図DB20等の情報に基づき認識した現在位置を示す情報(「現在位置情報」とも呼ぶ)から、車両が現在走行中の道路区間(「走行区間」とも呼ぶ。)及び車線(「走行車線」とも呼ぶ。)を認識する。そして、走行区間判定部53は、認識した走行区間及び走行車線の情報を道路エレメント情報抽出部54に供給する。
道路エレメント情報抽出部54は、自動運転データエレメントテーブルTeを参照し、候補経路内区間指定部52が指定した各候補経路の道路区間に対応する道路エレメント情報Ie等を抽出する。同様に、道路エレメント情報抽出部54は、走行区間判定部53から走行区間及び走行車線を指定する情報を受信した場合、指定された走行区間及び走行車線に対応する道路エレメント情報Ie等を、自動運転データエレメントテーブルTeから抽出する。そして、道路エレメント情報抽出部54は、抽出した道路エレメント情報Ieの情報等を自動運転機能判定部55へ送信する。道路エレメント情報抽出部54は、本発明における「第2取得部」の一例であり、道路エレメント情報Ieは、本発明における「第2情報」の一例である。
自動運転機能判定部55は、自動運転判定テーブルTjを参照し、道路エレメント情報抽出部54から受信した道路エレメント情報Ieと、センサ情報23が示すセンサの種類とに基づき、候補経路の各道路区間又は走行区間で実行可能な自動運転機能Fc及び自動化レベルLvの組を判定する。また、自動運転機能判定部55は、候補経路の各道路区間又は走行区間で実行可能な自動運転機能Fc又は所定の自動運転機能Fcの自動化レベルLvの少なくとも一方だけを判定するようにしてもよい。また、自動運転機能判定部55は、自動運転判定テーブルTjおよび、道路エレメント情報抽出部54から受信した道路エレメント情報Ieのデータ構造によっては、候補経路の各道路区間又は走行区間に対応する車線ごとに(すなわち車線単位で)、実行可能な自動運転機能Fc及び自動化レベルLvの組を判定するようにしてもよい。また、自動運転機能判定部55は、該当する候補経路の各道路区間また走行区間における天候を示す天候情報に更に考慮して、実行可能な自動運転機能Fc及び自動化レベルLvの組を判定するようにしてもよい。この場合、例えば、天候が悪いと予測される場合については、天候が良いと予測される場合と比べて、自動化レベルLvが低くなるように判定するようにしてもよい。これは、一般的に、悪天候の場合は、自動運転に用いられるセンサ等の検出精度が低下すること等に起因して、天気が良い場合に比べて自動運転が困難となることが予想されるためである。また、自動運転機能判定部55は、該当する候補経路の各道路区間また走行区間が自動運転車両専用レーンである場合は、該当する候補経路の各道路区間また走行区間が自動運転車両専用レーンでない場合に比べて、自動化レベルLvが高くなるように判定するようにしてもよい。
また、自動運転機能判定部55は、入力部14によって、搭乗者(運転車)の運転能力に関する情報を受け付けた場合、当該運転能力に関する情報を更に考慮して、実行可能な自動運転機能Fc及び自動化レベルLvの組を判定するようにしてもよい。例えば、搭乗者の運転能力が低い場合は、自動化レベルLvがレベル3以下の制御を禁止し、自動化レベルLvがレベル4の制御のみを実行させるようにしても良い。
そして、自動運転機能判定部55は、候補経路の各道路区間での実行可能な自動運転機能Fc及び自動化レベルLvに関する判定結果を、推奨経路特定部56へ供給する。また、自動運転機能判定部55は、走行区間での各自動運転機能Fcの実行可能な自動化レベルLvの判定結果を、自動運転制御部57へ供給する。自動運転機能判定部55は、本発明における「判定部」の一例である。
そして、自動運転機能判定部55は、候補経路の各道路区間での実行可能な自動運転機能Fc及び自動化レベルLvに関する判定結果を、推奨経路特定部56へ供給する。また、自動運転機能判定部55は、走行区間での各自動運転機能Fcの実行可能な自動化レベルLvの判定結果を、自動運転制御部57へ供給する。自動運転機能判定部55は、本発明における「判定部」の一例である。
推奨経路特定部56は、自動運転機能判定部55による候補経路の各道路区間での自動化レベルLvの判定結果に基づき、ユーザに提示する推奨経路を決定する。この場合、推奨経路特定部56は、例えば、各候補経路のうち、実行可能な自動運転機能Fcの平均数が最も多い候補経路を、推奨経路に設定してもよい。他の例では、推奨経路特定部56は、各候補経路のうち、ユーザが入力部14により指定した自動運転機能Fcの自動化レベルLvの平均が最も高い候補経路を、推奨経路に設定してもよい。そして、推奨経路特定部56は、設定した推奨経路の情報を、出力部16に表示させる。
自動運転制御部57は、設定された経路に基づき、センサ部13の出力情報を利用して車両の自動運転を行う。本実施例では、自動運転制御部57は、自動運転機能判定部55による判定結果に基づき、現在の走行区間で実行可能な自動運転機能Fc及び対応する自動化レベルLvを決定する。そして、推奨経路特定部56は、例えば、実行可能な自動運転機能Fcを、実行可能な自動化レベルLvのうち最も高いレベルにより実行する。
出力部16は、例えば、ディスプレイやスピーカ等であり、設定された目的地までの経路の案内に必要な情報を出力する。また、出力部16は、推奨経路特定部56が特定した推奨経路を表示する。そして、出力部16が表示した推奨経路により案内を開始する旨の入力が入力部14へなされた場合、運転支援装置1は、推奨経路により自動運転を開始する。
[データ構造]
図3(A)は、道路区間変換テーブルTcのデータ構造の一例を示す。図3(A)に示す道路区間変換テーブルTcでは、現在位置情報と、当該現在位置情報が示す位置に存在する道路区間を表す道路区間情報と、上記現在位置情報が示す位置に存在する車線を表す車線情報とが少なくとも関連付けられている。走行区間判定部53は、図3(A)に示す道路区間変換テーブルTcを参照することで、センサ部13、及び部分地図DB20等から取得した現在位置を示す現在位置情報に基づき、車両が存在する走行区間及び走行車線を認識する。
図3(A)は、道路区間変換テーブルTcのデータ構造の一例を示す。図3(A)に示す道路区間変換テーブルTcでは、現在位置情報と、当該現在位置情報が示す位置に存在する道路区間を表す道路区間情報と、上記現在位置情報が示す位置に存在する車線を表す車線情報とが少なくとも関連付けられている。走行区間判定部53は、図3(A)に示す道路区間変換テーブルTcを参照することで、センサ部13、及び部分地図DB20等から取得した現在位置を示す現在位置情報に基づき、車両が存在する走行区間及び走行車線を認識する。
図3(B)は、自動運転データエレメントテーブルTeのデータ構造の一例を示す。図3(B)に示す自動運転データエレメントテーブルTeでは、道路区間情報と、車線情報と、道路エレメント情報Ieと、後述する道路属性情報とが少なくとも関連付けられている。ここで、道路属性情報は、対応する道路区間における道路の状態を示す情報であり、例えば、道路区間における高低差、平均バンク角、路面状態(砂利道又は舗装道路等)などの情報を含む。道路エレメント情報抽出部54は、図3(B)に示す自動運転データエレメントテーブルTeを参照することで、候補経路内区間指定部52又は走行区間判定部53で指定された道路区間に対応する道路エレメント情報Ie及び道路属性情報等を抽出する。
図3(C)は、ある道路区間に関連付けられた道路エレメント情報Ieのデータ構造の一例を示す。図3(C)に示す道路エレメント情報Ieは、自動運転の可否に利用する道路情報の分類を示す「カテゴリー」の項目と、各カテゴリーをさらに分類した「サブカテゴリー」の項目と、サブカテゴリーが示す情報又は対象物の有無を示す「有無」の項目と、サブカテゴリーが示す情報又は対象物の詳細情報を示す「属性情報」の項目とを有する。なお、説明便宜上、図3(C)に示す「属性情報」の項目の一部には、属性情報に登録され得る情報の種別が例示されているが、実際には例示された種別を特定する具体的な情報が登録される。
図3(C)の例では、カテゴリー「ペイント情報」に対し、4つのサブカテゴリー「センターライン」、「路肩ライン」、「文字・図形・矢印」、「横断歩道」が存在し、対象となる道路区間では、センターライン及び路肩ラインが存在する。そして、この場合、道路エレメント情報Ieには、対象となる道路区間に存在するセンターライン及び路肩ラインに対応する属性情報として、色、線種、幅等の情報が含まれる。同様に、カテゴリー「車線情報」には、7つのサブカテゴリーが存在し、そのうち、対象となる道路区間では、車線数の情報のみが存在する。この場合、道路エレメント情報Ieには、サブカテゴリー「車線数」の属性情報として、車線数の情報が含まれる。
また、カテゴリー「ランドマーク情報」には、4つのサブカテゴリーが存在し、そのうち、対象となる道路区間では、電柱及び道路標識が存在する。この場合、道路エレメント情報Ieには、サブカテゴリー「電柱」に対応する属性情報として、電柱の位置、高さ、幅、平均間隔等が含まれており、サブカテゴリー「道路標識」に対応する属性情報として、道路標識の種類を示す情報が含まれる。なお、図3(C)における「センターライン」、「路肩ライン」、「文字・図形・矢印」、「横断歩道」、「電柱」、「ガードレール」、「道路標識」、「信号」は、本発明における「対象物」の一例である。
また、カテゴリー「ランドマーク情報」には、4つのサブカテゴリーが存在し、そのうち、対象となる道路区間では、電柱及び道路標識が存在する。この場合、道路エレメント情報Ieには、サブカテゴリー「電柱」に対応する属性情報として、電柱の位置、高さ、幅、平均間隔等が含まれており、サブカテゴリー「道路標識」に対応する属性情報として、道路標識の種類を示す情報が含まれる。なお、図3(C)における「センターライン」、「路肩ライン」、「文字・図形・矢印」、「横断歩道」、「電柱」、「ガードレール」、「道路標識」、「信号」は、本発明における「対象物」の一例である。
図4(A)は、自動運転判定テーブルTjのデータ構造の一例を示す。図4(A)に示す自動運転判定テーブルTjでは、自動運転機能Fcの自動化レベルLvごとに、「車種対応」、「使用センサ」、及び「適用条件」の各項目が関連付けられている。ここで、「車種対応」の項目は、自動運転対応情報24に基づき生成された項目であり、運転支援装置1を搭載する車両の自動運転機能Fc及び自動化レベルLvの各組への対応の有無を示す。また、「使用センサ」の項目は、対応する自動運転機能Fc及び自動化レベルLvの組を実行する場合に使用するセンサを示す。「適用条件」の項目は、対応する自動運転機能Fc及び自動化レベルLvの組を実行するのに必要な道路エレメント情報Ieに関する条件を示す。図4(A)の「適用条件」の項目では、説明便宜上、道路エレメント情報Ieに関する条件がアルファベット(ここではA~D)により抽象化して表されている。また、図4(A)では、自動運転機能Fcとして、自動化レベルLvが3段階存在する機能αと自動化レベルLvが2段階存在する機能βとが規定されており、この例においては、運転支援装置1の車両は、機能αの全レベル及び機能βのレベル2に対応している事を示す。
ここで、図4(A)に示す自動運転判定テーブルTjを参照して自動運転機能判定部55が各自動運転機能Fcの自動化レベルLvの実行可否を判定する具体例について説明する。図4(B)は、図4(A)と同様に道路エレメント情報Ieを抽象化した自動運転データエレメントテーブルTeを示す。図4(B)の例では、道路エレメント情報IeのサブカテゴリーがA~Dの4つ存在するものとし、サブカテゴリーごとの対応の有無(即ち図3(C)の項目「有無」の情報)を「○」または「×」により表している。
例えば、道路区間アの車線1を対象とする場合、自動運転機能判定部55は、自動運転データエレメントテーブルTeを参照し、道路エレメント情報Ieのうち、各サブカテゴリーA、B、Dが存在し、サブカテゴリーCが存在しないことを認識する。よって、自動運転機能判定部55は、図4(A)の自動運転判定テーブルTjを参照し、機能αのレベル1、2と、機能βのレベル1が適用条件を満たすと判定する。また、自動運転機能判定部55は、センサ部13がカメラ31及びライダ32を有することをセンサ情報23から認識し、機能αのレベル1、2及び機能βのレベル1を実行可能なセンサを車両が有していると判断する。一方、自動運転機能判定部55は、車両が機能βのレベル1に対応していないことから、機能βのレベル1については実行できないと判断する。従って、自動運転機能判定部55は、道路区間アの車線1では、機能αのレベル1及び2が実行可能であると判断する。よって、道路区間アの車線1の走行時には、自動運転制御部57は、例えば、自動化の程度が高い機能αのレベル2を実行する。
他の例として、道路区間アの車線2を対象とする場合、自動運転機能判定部55は、自動運転データエレメントテーブルTeを参照し、道路エレメント情報Ieのうち、各サブカテゴリーA、Dが存在し、サブカテゴリーB、Cが存在しないことを認識する。よって、自動運転機能判定部55は、図4(A)の自動運転判定テーブルTjを参照し、機能αのレベル1と、機能βのレベル1が適用条件を満たすと判定する。また、自動運転機能判定部55は、センサ部13としてカメラ31及びライダ32を有することから、機能αのレベル1及び機能βのレベル1を実行可能なセンサを有していると判断する。一方、自動運転機能判定部55は、車両が機能βのレベル1に対応していないことから、機能βのレベル1については実行できないと判断する。従って、自動運転機能判定部55は、道路区間アの車線1では、機能αのレベル1が実行可能であると判断する。よって、道路区間アの車線1の走行時には、自動運転制御部57は、機能αのレベル1を実行する。
なお、候補経路の各道路区間の自動運転機能の可否を判定する場合には、車線が指定されずに道路区間のみが指定される。この場合、例えば、自動運転機能判定部55は、候補経路の各道路区間内で通行可能な車線から任意の車線を、対象の候補経路を利用する場合に通過する車線とみなして推奨経路を決定してもよい。他の例では、自動運転機能判定部55は、対象となる道路区間内で通行可能な車線のうち最も利用可能な自動運転機能Fcが多い車線又は利用可能な自動運転機能Fcの自動化レベルLvが高い車線を、対象の候補経路を利用する場合に通過する車線とみなして推奨経路を選択してもよい。
[処理フロー]
(1)経路探索処理
図5は、運転支援装置1が実行する経路探索処理の手順を示すフローチャートである。
(1)経路探索処理
図5は、運転支援装置1が実行する経路探索処理の手順を示すフローチャートである。
まず、運転支援装置1は、目的地を指定する入力を入力部14により受け付ける(ステップS101)。そして、運転支援装置1の経路探索部51は、入力された目的地までの候補経路を探索する(ステップS102)。この場合、経路探索部51は、例えば、自動運転の可否に関する条件以外の一般的条件(例えば、距離、料金等)を勘案して、所定個数分の候補経路を探索する。そして、道路エレメント情報抽出部54は、経路探索部51が探索した候補経路の各道路区間に対応する道路エレメント情報Ieを、自動運転データエレメントテーブルTeから抽出することで取得する(ステップS103)。
次に、自動運転機能判定部55は、道路エレメント情報抽出部54が取得した道路エレメント情報Ieと、センサ情報23と、記憶部12が記憶する自動運転判定テーブルTjとを参照し、候補経路の各道路区間で実行可能な自動運転機能Fc及び自動化レベルLvの組を認識する(ステップS104)。
そして、推奨経路特定部56は、ステップS104での判定結果に基づき、ユーザに提示すべき推奨経路を候補経路から選定し、当該推奨経路を出力部16によりユーザに提示する(ステップS105)。この場合、例えば、推奨経路特定部56は、実行可能な自動運転機能Fcが多い又は実行する自動運転機能Fcの自動化レベルLvが高い道路区間からなる候補経路を推奨経路として選定する。その後、運転支援装置1は、ユーザ入力に基づき、推奨経路を目的地までの案内経路として設定し、当該案内経路に基づき自動運転を開始する。これにより、運転支援装置1は、ユーザの運転操作の負担が少ない経路を優先的に案内することができる。
(2)自動運転処理
図6は、運転支援装置1が実行する自動運転処理の手順を示すフローチャートである。
図6は、運転支援装置1が実行する自動運転処理の手順を示すフローチャートである。
まず、走行区間判定部53は、センサ部13と、部分地図DB20等によって得られた現在位置情報から、道路区間変換テーブルTcを参照して、車両が走行中の走行区間及び走行車線を認識する(ステップS201)。そして、道路エレメント情報抽出部54は、ステップS201で特定された走行区間及び車線に対応する道路エレメント情報Ieを、自動運転データエレメントテーブルTeから抽出することで取得する(ステップS202)。
次に、自動運転機能判定部55は、道路エレメント情報抽出部54が取得した道路エレメント情報Ieと、センサ情報23と、記憶部12が記憶する自動運転判定テーブルTjとを参照し、現在走行中の走行区間及び車線で実行可能な自動運転機能Fc及び自動化レベルLvの組を認識する(ステップS203)。そして、自動運転制御部57は、ステップS203で実行可能と判定された自動運転機能Fcを、実行可能な自動化レベルLvにより実行することで、自動運転を行う(ステップS204)。この場合、自動運転制御部57は、例えば、実行可能な自動運転機能Fcの自動化レベルLvが複数ある場合には、最も高い自動化レベルLvにより当該自動運転機能Fcを実行するとよい。
以上説明したように、本実施例に係る運転支援装置1は、車両周辺の情報又は車両の状態に関する情報を取得するセンサ部13の出力に基づき自動運転を行うものであって、自動運転対応情報24等に基づいた自動運転判定テーブルTjを記憶する。そして、運転支援装置1は、自動運転判定テーブルTjを参照し、センサ部13に関するセンサ情報23と、所定の道路区間における道路に関する道路エレメント情報Ieとに基づいて、上述の所定の道路区間において車両が実現可能な自動運転機能Fc及び自動化レベルLvの組を判定する。このようにすることで、運転支援装置1は、車両が実現可能な自動運転機能Fc及び自動化レベルLvの組を道路区間ごとに好適に認識することができる。
[表示例]
次に、実施例における運転支援装置1の表示例について説明する。図7は、案内経路の決定後における運転支援装置1の表示の一例である。
次に、実施例における運転支援装置1の表示例について説明する。図7は、案内経路の決定後における運転支援装置1の表示の一例である。
図7の表示例において、上述した経路探索処理のS101にて受け付けた目的地が地点Gであり、経路探索における出発地点(現在位置又は出発地点として指定された地点等)がSである。
また、S105にて決定された推奨経路が、道路L1、L2、L3、L4であることを示している。また、図7は、自動運転機能Fcが機能αである場合について、各道路にて車両が実行可能な自動化レベルLvを示している。また、制御部15は、推奨経路を構成する道路L1~L4においては、それぞれの道路で実行可能な自動化レベルLvに対応した表示態様で表示するようにしている。図7では、道路L1及び道路L4での実行可能な自動化レベルLvがレベル1、道路L3での実行可能な自動化レベルLvがレベル2、道路L2での実行可能な自動化レベルLvがレベル3となっており、制御部15は、実行可能な自動化レベルLvが高いほど、濃い色にて推奨経路を構成する各道路L1~L4を表示するようにしている。なお、このほか、制御部15は、自動化レベルLvに応じて推奨経路を構成する道路又は車線の色を変えてもよい。すなわち、制御部15は、地図上にて、推奨経路を構成する道路又は車線のそれぞれの自動化レベルLvを観察者が視認できるように明示してもよい。
また、図7では、制御部15は、推奨経路を構成する各道路L1~L4の各々に関連付けて、実行可能な自動化レベルLvをテキストにて吹きだし61~64により表示するようにしている。また、それに加え、制御部15は、右下にて各色(濃さ)がどの自動化レベルLvに対応しているのかを示すエリア68を設けている。制御部15は、上記吹きだし61~64又はエリア68を同時に表示してもよいし、何れか一方を表示するようにしてもよい。
また、制御部15は、利用者の操作にて、実行可能な自動化レベルLvを表示すべき自動運転機能Fcを切り替えられるようにしてもよい。図7の例では、制御部15は、現在設定されている自動運転機能Fc(図7では機能α)を表示する表示欄66と、設定する自動運転機能Fcを選択するためのボタン67とを有するセレクトボックス65を表示させている。この場合、例えば、図7のボタン67をユーザが選択することで、制御部15は、対応する他の自動運転機能Fcに切り替える。そして、制御部15は、切り替えられた自動運転機能Fcに応じて推奨経路を構成する各道路L1~L4の自動化レベルLvの表示も連動して切り替える。
[変形例]
次に、実施例に好適な変形例について説明する。以下の変形例は、任意に組み合わせて上述の実施例に適用してもよい。
次に、実施例に好適な変形例について説明する。以下の変形例は、任意に組み合わせて上述の実施例に適用してもよい。
(変形例1)
図2のブロック構成は、一例であり、本発明が適用可能なブロック構成は、これに限定されない。例えば、サーバ装置2は、運転支援装置1に代えて、実行可能な自動運転機能Fc及び自動化レベルLvの組の判定を行ってもよい。
図2のブロック構成は、一例であり、本発明が適用可能なブロック構成は、これに限定されない。例えば、サーバ装置2は、運転支援装置1に代えて、実行可能な自動運転機能Fc及び自動化レベルLvの組の判定を行ってもよい。
この場合、サーバ装置2は、自動運転データエレメントテーブルTeと、自動運転機能Fc及び自動化レベルLvの組ごとに道路エレメント情報Ieに関する条件を規定した自動運転判定テーブルTjとを予め記憶する。また、サーバ装置2は、運転支援装置1からセンサ情報23及び自動運転対応情報24を受信する。そして、サーバ装置2は、運転支援装置1から目的地を指定した経路探索要求を受信した場合、候補経路を探索する。そして、サーバ装置2は、各候補経路の道路区間を対象に、受信したセンサ情報23及び自動運転対応情報24と、対象の道路区間に対応する道路エレメント情報Ieと、自動運転判定テーブルTjとに基づき、対象の道路区間で実行可能な自動運転機能Fc及び自動化レベルLvの組を判定する。そして、サーバ装置2は、上述の判定結果に基づき、実施例の推奨経路特定部56と同様の処理を行うことで、推奨経路を決定し、決定した推奨経路の情報を、経路探索の要求元の運転支援装置1へ送信する。この場合、運転支援装置1は、サーバ装置2から受信した情報に基づき、推奨経路を表示する。
また、車両の走行時には、サーバ装置2は、運転支援装置1から現在位置を示す位置情報を受信し、当該現在位置に対応する道路区間及び車線で運転支援装置1を搭載する車両が実行可能な自動運転機能Fc及び自動化レベルLvを判定する。そして、サーバ装置2は、実行可能な自動運転機能Fc及び自動化レベルLvの情報を運転支援装置1へ送信する。この場合、運転支援装置1は、サーバ装置2から受信した情報に基づき、実行可能な自動運転機能Fcを、実行可能な自動化レベルLvにより実行する。
なお、本変形例では、サーバ装置2は、本発明における「自動運転支援装置」として機能し、サーバ装置2のCPUなどは、本発明における「第1取得部」、「第2取得部」、「判定部」及び本発明におけるプログラムを実行するコンピュータとして機能する。
本変形例におけるサーバ装置2の処理を、複数のサーバ装置からなるサーバシステムが実行してもよい。この場合、各サーバは、予め割り当てられた処理を実行するのに必要な情報を他のサーバから適宜受信して所定の処理を実行する。この場合、サーバシステムは、本発明における「自動運転支援装置」の一例である。
(変形例2)
運転支援装置1は、部分地図DB20とは別に自動運転データエレメントテーブルTeを取得及び保持してもよい。この場合、運転支援装置1は、例えば、全ての道路区間に対応する自動運転データエレメントテーブルTeを予め記憶しておいてもよく、サーバ装置2から地図データD1を取得するタイミングとは異なるタイミングで自動運転データエレメントテーブルTeをサーバ装置2から取得してもよい。
運転支援装置1は、部分地図DB20とは別に自動運転データエレメントテーブルTeを取得及び保持してもよい。この場合、運転支援装置1は、例えば、全ての道路区間に対応する自動運転データエレメントテーブルTeを予め記憶しておいてもよく、サーバ装置2から地図データD1を取得するタイミングとは異なるタイミングで自動運転データエレメントテーブルTeをサーバ装置2から取得してもよい。
(変形例3)
図4(A)に示す自動運転判定テーブルTjは、自動運転機能Fcの各自動化レベルLvの実行に必要なセンサの種類を、「使用センサ」の項目で規定していた。これに加え、自動運転判定テーブルTjは、自動運転機能Fcの各自動化レベルLvの実行に必要なセンサの性能をさらに規定してもよい。
図4(A)に示す自動運転判定テーブルTjは、自動運転機能Fcの各自動化レベルLvの実行に必要なセンサの種類を、「使用センサ」の項目で規定していた。これに加え、自動運転判定テーブルTjは、自動運転機能Fcの各自動化レベルLvの実行に必要なセンサの性能をさらに規定してもよい。
この場合、自動運転判定テーブルTjは、「使用センサ」の項目で指定されるセンサごとに、必要な性能情報を規定する項目を有する。例えば、項目「使用センサ」にカメラが登録されている場合、性能情報を規定する項目には、必要なカメラの性能(例えば画素数や画角等)の情報が記録される。そして、運転支援装置1の自動運転機能判定部55は、自動運転機能Fcの実行可否判定を行う場合、センサ情報23に含まれる各センサ部13の性能情報に基づき、実行可能な自動運転機能Fc及び自動化レベルLvの組を判定する。
(変形例4)
運転支援装置1は、各候補経路の道路区間ごとに実行可能な自動運転機能Fcが識別できるように、各候補経路を道路区間ごとに表示態様を変えて表示してもよい。さらに、運転支援装置1は、実行可能な自動化レベルLvが識別できるように、実行可能な自動化レベルLvごとにさらに表示態様を変えてもよい。この場合、運転支援装置1は、実行可能な自動化レベルLvが複数存在する場合には、例えば、その中で最も高いレベルに標準を合わせて表示態様を決定する。そして、運転支援装置1は、表示した各候補経路からユーザが選択した1つの候補経路を、案内経路として設定し、経路案内を開始する。
運転支援装置1は、各候補経路の道路区間ごとに実行可能な自動運転機能Fcが識別できるように、各候補経路を道路区間ごとに表示態様を変えて表示してもよい。さらに、運転支援装置1は、実行可能な自動化レベルLvが識別できるように、実行可能な自動化レベルLvごとにさらに表示態様を変えてもよい。この場合、運転支援装置1は、実行可能な自動化レベルLvが複数存在する場合には、例えば、その中で最も高いレベルに標準を合わせて表示態様を決定する。そして、運転支援装置1は、表示した各候補経路からユーザが選択した1つの候補経路を、案内経路として設定し、経路案内を開始する。
(変形例5)
運転支援装置1は、配信地図DB21の一部に相当する地図データD1を受信する代わりに、配信地図DB21の全データをサーバ装置2から受信して記憶してもよい。この場合、運転支援装置1は、所定の時点における配信地図DB21を予め記憶しておき、更新に必要なデータのみをサーバ装置2から受信してもよい。この場合、運転支援装置1は、所定の時間間隔ごとに、記憶した地図データの更新の要否の問合せをサーバ装置2に対して行い、更新に必要なデータをサーバ装置2から適宜ダウンロードする。
運転支援装置1は、配信地図DB21の一部に相当する地図データD1を受信する代わりに、配信地図DB21の全データをサーバ装置2から受信して記憶してもよい。この場合、運転支援装置1は、所定の時点における配信地図DB21を予め記憶しておき、更新に必要なデータのみをサーバ装置2から受信してもよい。この場合、運転支援装置1は、所定の時間間隔ごとに、記憶した地図データの更新の要否の問合せをサーバ装置2に対して行い、更新に必要なデータをサーバ装置2から適宜ダウンロードする。
(変形例6)
自動運転機能判定部55は、センサ情報23を参照してセンサ部13が備えるセンサの種類等を認識する代わりに、センサ部13と通信を行うことで、センサ部13が備えるセンサの種類等の情報を取得してもよい。
自動運転機能判定部55は、センサ情報23を参照してセンサ部13が備えるセンサの種類等を認識する代わりに、センサ部13と通信を行うことで、センサ部13が備えるセンサの種類等の情報を取得してもよい。
(変形例7)
実施例では、自動運転対応情報24が「車種対応」の項目として自動運転判定テーブルTjに組み込まれていた。これに代えて、自動運転判定テーブルTjに自動運転対応情報24が組み込まれていなくともよい。この場合、運転支援装置1は、自動運転対応情報24を参照し、運転支援装置1を搭載する車両が対応可能な自動運転機能Fc及び自動化レベルLvの組を認識する。
実施例では、自動運転対応情報24が「車種対応」の項目として自動運転判定テーブルTjに組み込まれていた。これに代えて、自動運転判定テーブルTjに自動運転対応情報24が組み込まれていなくともよい。この場合、運転支援装置1は、自動運転対応情報24を参照し、運転支援装置1を搭載する車両が対応可能な自動運転機能Fc及び自動化レベルLvの組を認識する。
また、自動運転判定テーブルTjは、「車種対応」及び「使用センサ」の項目を有しなくともよい。即ち、自動運転判定テーブルTjでは、車両が対応しない自動運転機能Fc及び自動化レベルLvの組、及び、センサ部13が有しないセンサを必要とする自動運転機能Fc及び自動化レベルLvの組が予め除外されていてもよい。この場合、自動運転判定テーブルTjは、センサ情報23及び自動運転対応情報24に基づいて生成され、道路エレメント情報Ieのみに依存して実行可否が変わる自動運転機能Fc及び自動化レベルLvの組の適用条件を規定する。
(変形例8)
制御部15は、図5のステップS105において、実行可能な自動運転機能Fc及び自動化レベルLvの組に基づき設定した自動運転レベルごとに推奨経路を探索し、自動運転レベルごとの推奨経路から案内経路として設定する推奨経路をユーザに選択させてもよい。
制御部15は、図5のステップS105において、実行可能な自動運転機能Fc及び自動化レベルLvの組に基づき設定した自動運転レベルごとに推奨経路を探索し、自動運転レベルごとの推奨経路から案内経路として設定する推奨経路をユーザに選択させてもよい。
図8は、図5のステップS105で表示させる経路選択画面の表示例を示す。図8の表示例において、図7と同様に、上述した経路探索処理のS101にて受け付けた目的地が地点Gであり、経路探索における出発地点(現在位置又は出発地点として指定された地点等)がSである。図8の例では、制御部15は、自動運転レベルが「高」、「中」、「低」のそれぞれに対応する推奨経路1~3を探索し、推奨経路1~3を地図上に表示すると共に、各推奨経路1~3の走行距離等の詳細説明をウィンドウ69上に表示させている。そして、制御部15は、推奨経路1~3のいずれかがタッチパネル等の入力部14への操作により選択されたことを検知した場合、選択された推奨経路を案内経路として設定する。
ここで、図8の例では、制御部15は、自動運転機能Fcの機能αをレベル「Z」により走行可能な道路区間から構成される候補経路を自動運転レベルが「高」の候補経路、機能αをレベル「X」(Z>X)により走行可能な道路区間から構成される候補経路を自動運転レベルが「中」の候補経路、自動運転機能Fcの機能βをレベルXにより走行可能な道路区間から構成される候補経路を自動運転レベルが「低」の候補経路とみなしている。なお、制御部15は、各自動運転レベルを認定するための要件となる自動運転機能Fc及び自動化レベルLvの組を示すテーブル等を予め記憶し、当該テーブルを参照して各候補経路の自動運転レベルを判定してもよい。そして、制御部15は、自動運転レベルが「高」の候補経路のうち所要時間や走行距離等の他の条件を勘案して最も推奨される候補経路を推奨経路1として選定する。同様に、制御部15は、自動運転レベルが「中」の候補経路から推奨経路2を選定し、自動運転レベルが「低」の候補経路から推奨経路3を選定し、選定した推奨経路1~3を選択可能に画面上に表示させる。
なお、制御部15は、経路選択画面で複数の推奨経路を表示させる場合、ユーザが重視する条件が良い推奨経路を優先して表示させてもよい。例えば、制御部15は、自動運転レベルを優先する旨の設定又は入力があった場合には、図8の表示例のように、自動運転レベル「高」の走行距離「201km」の経路を推奨経路1として最上位に表示し、自動運転レベル「中」の走行距離「180km」の経路を推奨経路2、自動運転レベル「低」の走行距離「160km」の経路を推奨経路3として表示する。他の例では、制御部15は、走行距離を優先する旨の設定又は入力があった場合には、走行経路が短い順に推奨経路を表示させる。この場合、図8の表示例に代えて、制御部15は、自動運転レベル「低」の走行距離「160km」の経路を推奨経路1として最上位に表示し、自動運転レベル「中」の走行距離「180km」の経路を推奨経路2、自動運転レベル「高」の走行距離「201km」の経路を推奨経路3として表示する。
(変形例9)
制御部15は、図5のステップS105において推奨経路を決定する場合、ユーザが指定した自動運転機能Fc及び自動化レベルLvの組を常に実行可能な経路を推奨経路として探索してもよい。
制御部15は、図5のステップS105において推奨経路を決定する場合、ユーザが指定した自動運転機能Fc及び自動化レベルLvの組を常に実行可能な経路を推奨経路として探索してもよい。
この場合、例えば、制御部15は、ステップS101において、目的地を指定する入力と共に、所望の自動運転機能Fc及び自動化レベルLvの組を指定する入力を受け付ける。そして、制御部15は、ステップS104で各候補経路の各道路区間で実行可能な自動運転機能Fc及び自動化レベルLvの組を認識後、ユーザ入力により指定された自動運転機能Fc及び自動化レベルLvの組を実行可能な道路区間からなる候補経路を、推奨経路として選定する。なお、制御部15は、ユーザ入力により指定された自動運転機能Fc及び自動化レベルLvの組を実行可能な道路区間からなる候補経路が複数存在する場合には、(変形例8)と同様に経路選択画面を表示させ、該当する複数の候補経路から1つの経路を案内経路としてユーザに選択させるとよい。
1 運転支援装置
2 サーバ装置
9 ネットワーク
11 通信部
12 記憶部
13 センサ部
14 入力部
15 制御部
16 出力部
2 サーバ装置
9 ネットワーク
11 通信部
12 記憶部
13 センサ部
14 入力部
15 制御部
16 出力部
Claims (11)
- 車両周辺の情報又は車両の状態に関する情報を取得する周辺情報取得部に関する第1情報を取得又は記憶する第1取得部と、
所定の区間における、道路に関する第2情報を取得する第2取得部と、
前記第1情報と前記第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定部と、
を備えることを特徴とする自動運転支援装置。 - 前記判定部は、前記機能の程度ごとに前記第2情報に関する条件を示したテーブル情報に基づいて、前記判定を行うことを特徴とする請求項1に記載の自動運転支援装置。
- 前記判定部は、前記自動運転に関する複数の機能のうち、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定することを特徴とする請求項1または2に記載の自動運転支援装置。
- 前記周辺情報取得部が取得した周辺情報に基づいて、前記車両の自動運転を行う自動運転制御部を備え、
前記第2情報は、前記自動運転を行うために前記周辺情報取得部により検出される対象物に関する情報であることを特徴とする請求項1~3のいずれか一項に記載の自動運転支援装置。 - 前記周辺情報取得部が取得した周辺情報に基づいて、前記車両の自動運転を行う自動運転制御部を備え、
前記第2取得部は、前記車両の現在位置に対応する区間における前記第2情報を取得し、
前記判定部は、前記現在位置に対応する区間において前記車両が実現可能な自動運転に関する機能の程度の判定を行い、
前記自動運転制御部は、前記判定部による判定結果に基づき、前記現在位置に対応する区間において実行する自動運転の機能及び程度を決定することを特徴とする請求項1~4のいずれか一項に記載の自動運転支援装置。 - 外部入力により指定された目的地までの経路の候補を探索する経路探索部と、
前記経路の候補から推奨経路を選択する推奨経路決定部と、をさらに有し、
前記第2取得部は、前記候補に含まれる各区間に対応する第2情報を取得し、
前記判定部は、前記候補に含まれる各区間において前記車両が実現可能な自動運転に関する機能の程度の判定を行い、
前記推奨経路決定部は、前記判定部による判定結果に基づき、前記推奨経路を選択することを特徴とする請求項1~5のいずれか一項に記載の自動運転支援装置。 - 車両周辺の情報を取得する周辺情報取得部の種類又は性能に関する第1情報を取得又は記憶する第1取得部と、
所定の区間における、道路に関する第2情報を取得する第2取得部と、
前記第1情報と前記第2情報とに基づいて、前記所定区間において前記車両が実現可能な自動運転に関する機能の程度を判定する判定部と、
を備えることを特徴とする自動運転支援装置。 - 車両が実施可能な自動運転に関する機能の程度に関する第1情報を取得又は記憶する第1取得部と、
所定の区間における、道路に関する第2情報を取得する第2取得部と、
前記第1情報と前記第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定部と、
を備えることを特徴とする自動運転支援装置。 - 自動運転支援装置が実行する制御方法であって、
車両周辺の情報又は車両の状態に関する情報を取得する周辺情報取得部に関する第1情報と、所定の区間における、道路に関する第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定工程
を有することを特徴とする制御方法。 - コンピュータが実行するプログラムであって、
車両周辺の情報又は車両の状態に関する情報を取得する周辺情報取得部に関する第1情報と、所定の区間における、道路に関する第2情報とに基づいて、自動運転の機能ごとに、前記所定区間において前記車両が実現可能な前記自動運転に関する機能の程度を判定する判定部
として前記コンピュータを機能させることを特徴とするプログラム。 - 請求項10に記載のプログラムを記憶したことを特徴とする記憶媒体。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017508367A JPWO2016152873A1 (ja) | 2015-03-24 | 2016-03-22 | 自動運転支援装置、制御方法、プログラム及び記憶媒体 |
| CN202110656642.7A CN113570894B (zh) | 2015-03-24 | 2016-03-22 | 自动驾驶辅助装置、控制方法及存储介质 |
| CN202110654743.0A CN113570893B (zh) | 2015-03-24 | 2016-03-22 | 自动驾驶辅助装置、控制方法及存储介质 |
| US15/560,525 US10942517B2 (en) | 2015-03-24 | 2016-03-22 | Autonomous driving assistance device, control method, program and storage medium |
| EP16768776.3A EP3276586B1 (en) | 2015-03-24 | 2016-03-22 | Automatic driving assistance device, control method, program, and storage medium |
| CN201680023814.4A CN107533794A (zh) | 2015-03-24 | 2016-03-22 | 自动驾驶辅助装置、控制方法、程序及存储介质 |
| US17/183,781 US12005934B2 (en) | 2015-03-24 | 2021-02-24 | Autonomous driving assistance device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPPCT/JP2015/058881 | 2015-03-24 | ||
| PCT/JP2015/058881 WO2016151749A1 (ja) | 2015-03-24 | 2015-03-24 | 自動運転支援装置、制御方法、プログラム及び記憶媒体 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/560,525 A-371-Of-International US10942517B2 (en) | 2015-03-24 | 2016-03-22 | Autonomous driving assistance device, control method, program and storage medium |
| US17/183,781 Division US12005934B2 (en) | 2015-03-24 | 2021-02-24 | Autonomous driving assistance device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016152873A1 true WO2016152873A1 (ja) | 2016-09-29 |
Family
ID=56977057
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/058881 Ceased WO2016151749A1 (ja) | 2015-03-24 | 2015-03-24 | 自動運転支援装置、制御方法、プログラム及び記憶媒体 |
| PCT/JP2016/059036 Ceased WO2016152873A1 (ja) | 2015-03-24 | 2016-03-22 | 自動運転支援装置、制御方法、プログラム及び記憶媒体 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/058881 Ceased WO2016151749A1 (ja) | 2015-03-24 | 2015-03-24 | 自動運転支援装置、制御方法、プログラム及び記憶媒体 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US10942517B2 (ja) |
| EP (1) | EP3276586B1 (ja) |
| JP (6) | JPWO2016152873A1 (ja) |
| CN (4) | CN113570894B (ja) |
| WO (2) | WO2016151749A1 (ja) |
Cited By (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106713430A (zh) * | 2016-12-07 | 2017-05-24 | 深圳市元征科技股份有限公司 | 一种驾驶控制方法及装置 |
| JP2018059860A (ja) * | 2016-10-07 | 2018-04-12 | アイシン・エィ・ダブリュ株式会社 | 経路案内システム、及び経路案内プログラム |
| JP2018124686A (ja) * | 2017-01-30 | 2018-08-09 | ダイハツ工業株式会社 | 自動車の手動運転切替システム |
| WO2018143238A1 (ja) * | 2017-01-31 | 2018-08-09 | パイオニア株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| WO2018180226A1 (ja) * | 2017-03-29 | 2018-10-04 | パナソニックIpマネジメント株式会社 | ナビゲーション方法およびそれを利用したナビゲーション装置 |
| CN108733050A (zh) * | 2017-04-13 | 2018-11-02 | 松下电器(美国)知识产权公司 | 信息处理方法以及信息处理装置 |
| JP2018181301A (ja) * | 2017-04-13 | 2018-11-15 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 情報処理方法及び情報処理装置 |
| WO2019065229A1 (ja) * | 2017-09-29 | 2019-04-04 | パイオニア株式会社 | 情報生成装置、情報生成方法、および、情報生成装置用プログラム |
| WO2019107397A1 (ja) * | 2017-11-30 | 2019-06-06 | パイオニア株式会社 | 地図データのデータ構造 |
| CN109863545A (zh) * | 2016-10-21 | 2019-06-07 | 三菱电机株式会社 | 自动驾驶辅助装置、自动驾驶车、自动驾驶辅助方法及自动驾驶辅助程序 |
| JP2019124554A (ja) * | 2018-01-16 | 2019-07-25 | クラリオン株式会社 | 情報提供装置、及び情報提供方法 |
| WO2019142276A1 (ja) * | 2018-01-17 | 2019-07-25 | 三菱電機株式会社 | 運転制御装置、運転制御方法及び運転制御プログラム |
| WO2020012209A1 (ja) * | 2018-07-11 | 2020-01-16 | 日産自動車株式会社 | 経路算出方法、運転制御方法及び経路算出装置 |
| JP2020008441A (ja) * | 2018-07-09 | 2020-01-16 | 株式会社日立製作所 | 自動運転支援装置及びその方法 |
| JP2020076726A (ja) * | 2018-11-05 | 2020-05-21 | トヨタ自動車株式会社 | 地図情報システム |
| JP2020170398A (ja) * | 2019-04-04 | 2020-10-15 | トヨタ自動車株式会社 | 車両制御装置 |
| WO2020230693A1 (ja) * | 2019-05-16 | 2020-11-19 | ソニー株式会社 | 情報処理装置、および情報処理方法、並びにプログラム |
| JP2021092793A (ja) * | 2021-02-02 | 2021-06-17 | パイオニア株式会社 | 地図データ構造、送信装置及び地図表示装置 |
| JPWO2020100584A1 (ja) * | 2018-11-13 | 2021-11-04 | ソニーグループ株式会社 | 情報処理装置、および情報処理方法、並びにプログラム |
| JP2021193605A (ja) * | 2017-01-19 | 2021-12-23 | ソニーセミコンダクタソリューションズ株式会社 | 車両制御装置及び車両制御方法 |
| JP7126585B1 (ja) | 2021-04-09 | 2022-08-26 | 三菱電機株式会社 | 自動運転支援装置及び車両制御装置 |
| WO2023276280A1 (ja) * | 2021-07-01 | 2023-01-05 | 日立Astemo株式会社 | 車両制御装置、車両管制装置、車両管制システム、および車両管制方法 |
| JP2023502632A (ja) * | 2019-11-13 | 2023-01-25 | メルセデス・ベンツ グループ アクチェンゲゼルシャフト | 走行経路を承認するための方法 |
| US11680820B2 (en) | 2018-11-05 | 2023-06-20 | Toyota Jidosha Kabushiki Kaisha | Map information system |
| WO2023203707A1 (ja) * | 2022-04-21 | 2023-10-26 | 三菱電機株式会社 | 運転支援装置、運転支援システムおよび運転支援方法 |
| US12275411B2 (en) | 2020-03-04 | 2025-04-15 | Hitachi Astemo, Ltd. | Electronic control apparatus, control method, and automated driving system |
Families Citing this family (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9587952B1 (en) * | 2015-09-09 | 2017-03-07 | Allstate Insurance Company | Altering autonomous or semi-autonomous vehicle operation based on route traversal values |
| JP6575818B2 (ja) * | 2016-03-25 | 2019-09-18 | パナソニックIpマネジメント株式会社 | 運転支援方法およびそれを利用した運転支援装置、自動運転制御装置、車両、運転支援システム、プログラム |
| US20170356750A1 (en) * | 2016-06-14 | 2017-12-14 | nuTonomy Inc. | Route Planning for an Autonomous Vehicle |
| US10309792B2 (en) | 2016-06-14 | 2019-06-04 | nuTonomy Inc. | Route planning for an autonomous vehicle |
| US11092446B2 (en) | 2016-06-14 | 2021-08-17 | Motional Ad Llc | Route planning for an autonomous vehicle |
| US10921810B2 (en) * | 2016-08-02 | 2021-02-16 | Pcms Holdings, Inc. | System and method for optimizing autonomous vehicle capabilities in route planning |
| JP6652477B2 (ja) * | 2016-10-03 | 2020-02-26 | 日立オートモティブシステムズ株式会社 | 車載処理装置 |
| JP6573594B2 (ja) * | 2016-11-29 | 2019-09-11 | 株式会社Subaru | 自動運転制御装置 |
| JP6573595B2 (ja) * | 2016-11-29 | 2019-09-11 | 株式会社Subaru | 自動運転制御装置 |
| WO2018106774A1 (en) | 2016-12-08 | 2018-06-14 | Pcms Holdings, Inc. | System and method for routing and reorganization of a vehicle platoon in a smart city |
| CN108347781B (zh) * | 2017-01-24 | 2019-09-17 | 电信科学技术研究院 | 一种信息传输方法及装置 |
| US11545262B2 (en) * | 2017-06-16 | 2023-01-03 | Honda Motor Co., Ltd. | Mobile body and management system |
| KR102387613B1 (ko) * | 2017-06-26 | 2022-04-15 | 엘지전자 주식회사 | 차량용 인터페이스 시스템 |
| US10571919B2 (en) | 2017-07-26 | 2020-02-25 | Lenovo (Singapore) Pte. Ltd. | Systems and methods to identify directions based on use of autonomous vehicle function |
| JP6984232B2 (ja) * | 2017-08-25 | 2021-12-17 | トヨタ自動車株式会社 | 自動運転装置 |
| US10496098B2 (en) * | 2017-09-12 | 2019-12-03 | Baidu Usa Llc | Road segment-based routing guidance system for autonomous driving vehicles |
| US10710607B2 (en) * | 2018-02-12 | 2020-07-14 | Lenovo (Singapore) Pte. Ltd. | Systems and methods for identifying first route to destination as involving less human driving of vehicle than second route to destination |
| JP7062997B2 (ja) * | 2018-02-15 | 2022-05-09 | トヨタ自動車株式会社 | 車両制御システム及び車両制御方法 |
| JP6997006B2 (ja) * | 2018-02-26 | 2022-01-17 | フォルシアクラリオン・エレクトロニクス株式会社 | 車載装置、サーバ、情報システム |
| WO2019198481A1 (ja) * | 2018-04-13 | 2019-10-17 | 日立オートモティブシステムズ株式会社 | 推奨レーン判定装置 |
| CN111971724B (zh) * | 2018-04-24 | 2022-05-10 | 三菱电机株式会社 | 行动选择装置、计算机能读取的存储介质和行动选择方法 |
| JP2019214319A (ja) * | 2018-06-13 | 2019-12-19 | 本田技研工業株式会社 | 認識処理装置、車両制御装置、認識処理方法、およびプログラム |
| JP2020008436A (ja) * | 2018-07-09 | 2020-01-16 | 株式会社東芝 | 経路情報支援装置および経路情報支援システム |
| JP7139896B2 (ja) * | 2018-11-07 | 2022-09-21 | トヨタ自動車株式会社 | 経路情報決定装置、経路情報システム、端末及び経路情報を決定する方法 |
| KR20200071840A (ko) * | 2018-12-03 | 2020-06-22 | 현대자동차주식회사 | 자율주행차량을 지원하는 시스템 및 방법 |
| JP7259343B2 (ja) * | 2019-01-18 | 2023-04-18 | トヨタ自動車株式会社 | 配車サービスシステム、配車サービス方法、およびプログラム |
| DE102019205942A1 (de) * | 2019-04-25 | 2020-10-29 | Volkswagen Aktiengesellschaft | Verfahren zum Bereitstellen einer Fahrtroute für ein Kraftfahrzeug mit mindestens einem Fahrerassistenzsystem und Kraftfahrzeug |
| CN110207719A (zh) * | 2019-05-21 | 2019-09-06 | 北京百度网讯科技有限公司 | 一种自动驾驶路径的处理方法及装置 |
| WO2020240767A1 (ja) * | 2019-05-30 | 2020-12-03 | 三菱電機株式会社 | 自動運転システム |
| US11137759B2 (en) | 2019-06-11 | 2021-10-05 | Fca Us Llc | Systems and methods of level 2 autonomous vehicle driving on multiply digitized roads |
| CN116153122A (zh) | 2019-08-01 | 2023-05-23 | 华为技术有限公司 | 一种车路协同方法及装置 |
| CN110415543A (zh) * | 2019-08-05 | 2019-11-05 | 北京百度网讯科技有限公司 | 车辆信息的交互方法、装置、设备以及存储介质 |
| KR102759404B1 (ko) * | 2019-09-11 | 2025-01-24 | 한화에어로스페이스 주식회사 | 위험맵에 위험 예측도를 반영하여 객체들의 주행 경로를 재생성하는 방법 및 원격통제장치 |
| CN110626336B (zh) * | 2019-09-24 | 2021-07-16 | 中国第一汽车股份有限公司 | 一种l3级车辆自动驾驶的控制系统 |
| CN113128303A (zh) * | 2019-12-31 | 2021-07-16 | 华为技术有限公司 | 一种自动驾驶方法、相关设备及计算机可读存储介质 |
| US20210258751A1 (en) | 2020-02-18 | 2021-08-19 | Lenovo (Singapore) Pte. Ltd. | Responding to a signal indicating that an autonomous driving feature has been overridden by alerting plural vehicles |
| JP7414605B2 (ja) * | 2020-03-23 | 2024-01-16 | 株式会社アイシン | 運転支援システム、運転支援プログラム |
| JP7192828B2 (ja) * | 2020-05-19 | 2022-12-20 | トヨタ自動車株式会社 | 地図選択装置及び地図選択用コンピュータプログラム |
| US12043274B2 (en) | 2020-08-24 | 2024-07-23 | Allstate Insurance Company | Autonomous driving algorithm evaluation and implementation |
| CN114162125B (zh) * | 2020-09-11 | 2024-11-22 | 奥迪股份公司 | 用于控制自动驾驶车辆的方法、装置、介质及车辆 |
| DE102020129888A1 (de) | 2020-11-12 | 2022-05-12 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum betreiben eines fahrzeugs |
| CN114379582A (zh) * | 2021-11-30 | 2022-04-22 | 华人运通(上海)自动驾驶科技有限公司 | 一种控制车辆各自动驾驶功能的方法、系统及存储介质 |
| JP7537455B2 (ja) * | 2022-03-15 | 2024-08-21 | トヨタ自動車株式会社 | 地図データ生成方法、走行計画作成方法、地図データ生成装置及び地図データ生成プログラム |
| JP7831090B2 (ja) * | 2022-03-31 | 2026-03-17 | 日産自動車株式会社 | 経路探索方法及び経路探索装置 |
| US12024172B2 (en) | 2022-05-10 | 2024-07-02 | Lenovo (Singapore) Pte. Ltd. | Lane assist for deviating from preexisting traffic lane |
| JP7800405B2 (ja) * | 2022-12-09 | 2026-01-16 | トヨタ自動車株式会社 | 自動運転制御装置 |
| US20250115281A1 (en) * | 2023-10-06 | 2025-04-10 | Electronics And Telecommunications Research Institute | Dynamic automation level-based autonomous driving system and method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004125726A (ja) * | 2002-10-07 | 2004-04-22 | Denso Corp | カーナビゲーション装置 |
| JP2010000949A (ja) * | 2008-06-20 | 2010-01-07 | Toyota Motor Corp | 運転支援装置 |
| JP2014066636A (ja) * | 2012-09-26 | 2014-04-17 | Toyota Motor Corp | 自車位置校正装置および自車位置校正方法 |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3600378B2 (ja) * | 1996-07-24 | 2004-12-15 | 本田技研工業株式会社 | 車両の外界認識装置 |
| CN1196306A (zh) * | 1998-04-10 | 1998-10-21 | 许志刚 | 一种汽车自动换档装置 |
| JP2003067896A (ja) | 2001-08-28 | 2003-03-07 | Hitachi Ltd | 車両制御装置 |
| JP2004126888A (ja) | 2002-10-01 | 2004-04-22 | Nissan Motor Co Ltd | 車両用情報提示装置 |
| JP4294450B2 (ja) | 2003-11-19 | 2009-07-15 | 富士重工業株式会社 | 車両用運転支援装置 |
| JP4645891B2 (ja) * | 2005-03-24 | 2011-03-09 | 日本精機株式会社 | 車両用運転支援装置及び車両用運転支援方法 |
| JP4894217B2 (ja) | 2005-10-05 | 2012-03-14 | 日産自動車株式会社 | 車線逸脱防止装置及びその方法 |
| DE102006008981A1 (de) * | 2006-02-23 | 2007-08-30 | Siemens Ag | Assistenzsystem zur Unterstützung eines Fahrers |
| CN101033978B (zh) * | 2007-01-30 | 2010-10-13 | 珠海市智汽电子科技有限公司 | 智能汽车辅助导航和自动兼辅助驾驶系统 |
| JP4386082B2 (ja) * | 2007-02-20 | 2009-12-16 | トヨタ自動車株式会社 | 車両走行支援装置 |
| JP4992813B2 (ja) * | 2008-04-22 | 2012-08-08 | アイシン・エィ・ダブリュ株式会社 | 運転支援装置、運転支援方法および運転支援プログラム |
| SE532431C2 (sv) * | 2008-05-30 | 2010-01-19 | Atlas Copco Rock Drills Ab | Metod och anordning för bestämning av en överensstämmelse mellan en representation av en omgivning och nämnda omgivning |
| US8401736B2 (en) | 2008-06-20 | 2013-03-19 | Toyota Jidosha Kabushiki Kaisha | Driving assistance apparatus and driving assistance method |
| JP5056613B2 (ja) * | 2008-06-20 | 2012-10-24 | トヨタ自動車株式会社 | 運転支援システム |
| JP2010055403A (ja) * | 2008-08-28 | 2010-03-11 | Fujitsu Ten Ltd | 運転支援装置、運転支援プログラムおよび車載システム |
| DE102008054207A1 (de) * | 2008-10-31 | 2009-06-10 | Daimler Ag | Verfahren und Vorrichtung zur Führung eines Fahrzeugs entlang einer vorgebbaren Solltrajektorie |
| JP5403049B2 (ja) * | 2009-03-03 | 2014-01-29 | トヨタ自動車株式会社 | 運転支援装置 |
| JP5233816B2 (ja) * | 2009-04-22 | 2013-07-10 | アイシン・エィ・ダブリュ株式会社 | 運転支援装置、運転支援方法及び運転支援プログラム |
| DE102009048493A1 (de) * | 2009-09-25 | 2011-04-07 | Valeo Schalter Und Sensoren Gmbh | Fahrerassistenzsystem für ein Fahrzeug, Fahrzeug mit einem Fahrerassistenzsystem und Verfahren zum Unterstützen eines Fahrers beim Führen eines Fahrzeugs |
| JP5506423B2 (ja) * | 2010-01-21 | 2014-05-28 | 株式会社Ihiエアロスペース | 無人車両の半自律走行システム |
| DE102010041537B4 (de) * | 2010-09-28 | 2021-04-15 | Bayerische Motoren Werke Aktiengesellschaft | Fahrerassistenzsystem zur Unterstützung des Fahrers zum verbrauchskontrollierten Fahren |
| WO2012077204A1 (ja) * | 2010-12-08 | 2012-06-14 | トヨタ自動車 株式会社 | 運転支援装置 |
| JP5516525B2 (ja) * | 2011-07-20 | 2014-06-11 | トヨタ自動車株式会社 | 運転支援装置 |
| WO2013145274A1 (ja) * | 2012-03-30 | 2013-10-03 | トヨタ自動車株式会社 | 運転支援装置 |
| CN104221068B (zh) * | 2012-04-12 | 2016-08-24 | 丰田自动车株式会社 | 驾驶辅助装置 |
| JP5987556B2 (ja) * | 2012-08-28 | 2016-09-07 | 株式会社デンソー | 通信制御システム |
| JP2014093018A (ja) | 2012-11-06 | 2014-05-19 | Honda Elesys Co Ltd | 車線認識装置、運転支援装置、車線認識方法、および、車線認識プログラム |
| CN203134149U (zh) * | 2012-12-11 | 2013-08-14 | 武汉高德红外股份有限公司 | 基于不同波段成像融合图像处理的车辆辅助驾驶系统 |
| EP2757013B1 (en) * | 2013-01-21 | 2019-08-14 | Volvo Car Corporation | Vehicle driver assist arrangement |
| WO2014152554A1 (en) * | 2013-03-15 | 2014-09-25 | Caliper Corporation | Lane-level vehicle navigation for vehicle routing and traffic management |
| JP6155921B2 (ja) * | 2013-07-12 | 2017-07-05 | 株式会社デンソー | 自動運転支援装置 |
| JP6467773B2 (ja) * | 2014-02-25 | 2019-02-13 | アイシン・エィ・ダブリュ株式会社 | 経路探索システム、経路探索方法及びコンピュータプログラム |
| DE112014006929B4 (de) * | 2014-09-05 | 2023-03-02 | Mitsubishi Electric Corporation | Autonomes Fahrmanagementsystem, Server und autonomes Fahrmanagementverfahren |
-
2015
- 2015-03-24 WO PCT/JP2015/058881 patent/WO2016151749A1/ja not_active Ceased
-
2016
- 2016-03-22 CN CN202110656642.7A patent/CN113570894B/zh active Active
- 2016-03-22 WO PCT/JP2016/059036 patent/WO2016152873A1/ja not_active Ceased
- 2016-03-22 CN CN202110655387.4A patent/CN113561990A/zh active Pending
- 2016-03-22 CN CN201680023814.4A patent/CN107533794A/zh active Pending
- 2016-03-22 CN CN202110654743.0A patent/CN113570893B/zh active Active
- 2016-03-22 US US15/560,525 patent/US10942517B2/en active Active
- 2016-03-22 EP EP16768776.3A patent/EP3276586B1/en active Active
- 2016-03-22 JP JP2017508367A patent/JPWO2016152873A1/ja active Pending
-
2019
- 2019-06-10 JP JP2019107679A patent/JP2019153349A/ja active Pending
-
2021
- 2021-02-02 JP JP2021015155A patent/JP2021077403A/ja active Pending
- 2021-02-24 US US17/183,781 patent/US12005934B2/en active Active
-
2022
- 2022-10-11 JP JP2022163152A patent/JP2023024971A/ja active Pending
-
2024
- 2024-07-02 JP JP2024106724A patent/JP7785858B2/ja active Active
-
2025
- 2025-12-03 JP JP2025225817A patent/JP2026026297A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004125726A (ja) * | 2002-10-07 | 2004-04-22 | Denso Corp | カーナビゲーション装置 |
| JP2010000949A (ja) * | 2008-06-20 | 2010-01-07 | Toyota Motor Corp | 運転支援装置 |
| JP2014066636A (ja) * | 2012-09-26 | 2014-04-17 | Toyota Motor Corp | 自車位置校正装置および自車位置校正方法 |
Cited By (54)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018059860A (ja) * | 2016-10-07 | 2018-04-12 | アイシン・エィ・ダブリュ株式会社 | 経路案内システム、及び経路案内プログラム |
| EP3531397A4 (en) * | 2016-10-21 | 2019-11-20 | Mitsubishi Electric Corporation | AUTONOMOUS DRIVING HELP, AUTONOMOUS VEHICLE, AUTONOMOUS DRIVING HELP PROCEDURE AND AUTONOMOUS DRIVING HELP PROGRAM |
| CN109863545B (zh) * | 2016-10-21 | 2022-04-26 | 三菱电机株式会社 | 自动驾驶辅助装置、自动驾驶车、自动驾驶辅助方法及计算机可读取存储介质 |
| US11273847B2 (en) | 2016-10-21 | 2022-03-15 | Mitsubishi Electric Corporation | Autonomous driving support apparatus and autonomous driving support method |
| CN109863545A (zh) * | 2016-10-21 | 2019-06-07 | 三菱电机株式会社 | 自动驾驶辅助装置、自动驾驶车、自动驾驶辅助方法及自动驾驶辅助程序 |
| CN106713430A (zh) * | 2016-12-07 | 2017-05-24 | 深圳市元征科技股份有限公司 | 一种驾驶控制方法及装置 |
| JP2021193605A (ja) * | 2017-01-19 | 2021-12-23 | ソニーセミコンダクタソリューションズ株式会社 | 車両制御装置及び車両制御方法 |
| JP2024019189A (ja) * | 2017-01-19 | 2024-02-08 | ソニーセミコンダクタソリューションズ株式会社 | 車両制御装置及び車両制御方法 |
| US12065157B2 (en) | 2017-01-19 | 2024-08-20 | Sony Semiconductor Solutions Corporation | Vehicle control apparatus and vehicle control method |
| JP7721618B2 (ja) | 2017-01-19 | 2025-08-12 | ソニーセミコンダクタソリューションズ株式会社 | 車両制御装置及び車両制御方法 |
| JP2018124686A (ja) * | 2017-01-30 | 2018-08-09 | ダイハツ工業株式会社 | 自動車の手動運転切替システム |
| US11709492B2 (en) | 2017-01-31 | 2023-07-25 | Pioneer Corporation | Information processing device, information processing method, and non-transitory computer readable medium |
| US11243534B2 (en) | 2017-01-31 | 2022-02-08 | Pioneer Corporation | Information processing device, information processing method, and non-transitory computer readable medium |
| WO2018143238A1 (ja) * | 2017-01-31 | 2018-08-09 | パイオニア株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| EP3578921A4 (en) * | 2017-01-31 | 2021-03-17 | Pioneer Corporation | INFORMATION PROCESSING DEVICE, INFORMATION PROCESSING METHOD AND PROGRAM |
| WO2018180226A1 (ja) * | 2017-03-29 | 2018-10-04 | パナソニックIpマネジメント株式会社 | ナビゲーション方法およびそれを利用したナビゲーション装置 |
| CN108733050A (zh) * | 2017-04-13 | 2018-11-02 | 松下电器(美国)知识产权公司 | 信息处理方法以及信息处理装置 |
| JP2018181301A (ja) * | 2017-04-13 | 2018-11-15 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 情報処理方法及び情報処理装置 |
| WO2019065229A1 (ja) * | 2017-09-29 | 2019-04-04 | パイオニア株式会社 | 情報生成装置、情報生成方法、および、情報生成装置用プログラム |
| US11705000B2 (en) | 2017-09-29 | 2023-07-18 | Pioneer Corporation | Information generation device, information generation method, and program for information generation device |
| WO2019107397A1 (ja) * | 2017-11-30 | 2019-06-06 | パイオニア株式会社 | 地図データのデータ構造 |
| JP7075219B2 (ja) | 2018-01-16 | 2022-05-25 | フォルシアクラリオン・エレクトロニクス株式会社 | 情報提供装置、及び情報提供方法 |
| JP2019124554A (ja) * | 2018-01-16 | 2019-07-25 | クラリオン株式会社 | 情報提供装置、及び情報提供方法 |
| JPWO2019142276A1 (ja) * | 2018-01-17 | 2020-10-22 | 三菱電機株式会社 | 運転制御装置、運転制御方法及び運転制御プログラム |
| US11639183B2 (en) | 2018-01-17 | 2023-05-02 | Mitsubishi Electric Corporation | Driving control device, driving control method, and computer readable medium |
| WO2019142276A1 (ja) * | 2018-01-17 | 2019-07-25 | 三菱電機株式会社 | 運転制御装置、運転制御方法及び運転制御プログラム |
| JP2020008441A (ja) * | 2018-07-09 | 2020-01-16 | 株式会社日立製作所 | 自動運転支援装置及びその方法 |
| JPWO2020012209A1 (ja) * | 2018-07-11 | 2021-08-26 | 日産自動車株式会社 | 経路算出方法、運転制御方法及び経路算出装置 |
| WO2020012209A1 (ja) * | 2018-07-11 | 2020-01-16 | 日産自動車株式会社 | 経路算出方法、運転制御方法及び経路算出装置 |
| JP7024871B2 (ja) | 2018-07-11 | 2022-02-24 | 日産自動車株式会社 | 経路算出方法、運転制御方法及び経路算出装置 |
| US11692848B2 (en) | 2018-11-05 | 2023-07-04 | Toyota Jidosha Kabushiki Kaisha | Map information system |
| US11680821B2 (en) | 2018-11-05 | 2023-06-20 | Toyota Jidosha Kabushiki Kaisha | Map information system |
| US11680820B2 (en) | 2018-11-05 | 2023-06-20 | Toyota Jidosha Kabushiki Kaisha | Map information system |
| JP2020076726A (ja) * | 2018-11-05 | 2020-05-21 | トヨタ自動車株式会社 | 地図情報システム |
| JP7167732B2 (ja) | 2018-11-05 | 2022-11-09 | トヨタ自動車株式会社 | 地図情報システム |
| US11796344B2 (en) | 2018-11-05 | 2023-10-24 | Toyota Jidosha Kabushiki Kaisha | Map information system |
| JP7424305B2 (ja) | 2018-11-13 | 2024-01-30 | ソニーグループ株式会社 | 情報処理装置、および情報処理方法、並びにプログラム |
| JPWO2020100584A1 (ja) * | 2018-11-13 | 2021-11-04 | ソニーグループ株式会社 | 情報処理装置、および情報処理方法、並びにプログラム |
| JP2020170398A (ja) * | 2019-04-04 | 2020-10-15 | トヨタ自動車株式会社 | 車両制御装置 |
| JP7081556B2 (ja) | 2019-04-04 | 2022-06-07 | トヨタ自動車株式会社 | 車両制御装置 |
| WO2020230693A1 (ja) * | 2019-05-16 | 2020-11-19 | ソニー株式会社 | 情報処理装置、および情報処理方法、並びにプログラム |
| JPWO2020230693A1 (ja) * | 2019-05-16 | 2020-11-19 | ||
| JP7548224B2 (ja) | 2019-05-16 | 2024-09-10 | ソニーグループ株式会社 | 情報処理装置、および情報処理方法、並びにプログラム |
| US12049237B2 (en) | 2019-05-16 | 2024-07-30 | Sony Group Corporation | Information processing apparatus, and information processing method, and program |
| JP7348398B2 (ja) | 2019-11-13 | 2023-09-20 | メルセデス・ベンツ グループ アクチェンゲゼルシャフト | 走行経路を承認するための方法 |
| US12181297B2 (en) | 2019-11-13 | 2024-12-31 | Mercedes-Benz Group AG | Method for enabling a route |
| JP2023502632A (ja) * | 2019-11-13 | 2023-01-25 | メルセデス・ベンツ グループ アクチェンゲゼルシャフト | 走行経路を承認するための方法 |
| US12275411B2 (en) | 2020-03-04 | 2025-04-15 | Hitachi Astemo, Ltd. | Electronic control apparatus, control method, and automated driving system |
| JP2021092793A (ja) * | 2021-02-02 | 2021-06-17 | パイオニア株式会社 | 地図データ構造、送信装置及び地図表示装置 |
| JP7123203B2 (ja) | 2021-02-02 | 2022-08-22 | ジオテクノロジーズ株式会社 | 自動運転の可否判定方法、自動運転の可否判定装置及び自動運転の可否判定システム |
| JP2022161403A (ja) * | 2021-04-09 | 2022-10-21 | 三菱電機株式会社 | 自動運転支援装置及び車両制御装置 |
| JP7126585B1 (ja) | 2021-04-09 | 2022-08-26 | 三菱電機株式会社 | 自動運転支援装置及び車両制御装置 |
| WO2023276280A1 (ja) * | 2021-07-01 | 2023-01-05 | 日立Astemo株式会社 | 車両制御装置、車両管制装置、車両管制システム、および車両管制方法 |
| WO2023203707A1 (ja) * | 2022-04-21 | 2023-10-26 | 三菱電機株式会社 | 運転支援装置、運転支援システムおよび運転支援方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3276586A4 (en) | 2018-12-05 |
| CN113561990A (zh) | 2021-10-29 |
| EP3276586B1 (en) | 2026-05-06 |
| JP2021077403A (ja) | 2021-05-20 |
| US12005934B2 (en) | 2024-06-11 |
| US20210200216A1 (en) | 2021-07-01 |
| US10942517B2 (en) | 2021-03-09 |
| JP7785858B2 (ja) | 2025-12-15 |
| US20180113460A1 (en) | 2018-04-26 |
| JP2019153349A (ja) | 2019-09-12 |
| WO2016151749A1 (ja) | 2016-09-29 |
| CN113570894B (zh) | 2023-09-01 |
| CN113570893A (zh) | 2021-10-29 |
| JP2024127917A (ja) | 2024-09-20 |
| JP2023024971A (ja) | 2023-02-21 |
| JP2026026297A (ja) | 2026-02-16 |
| CN113570893B (zh) | 2023-11-28 |
| EP3276586A1 (en) | 2018-01-31 |
| CN107533794A (zh) | 2018-01-02 |
| JPWO2016152873A1 (ja) | 2018-01-18 |
| CN113570894A (zh) | 2021-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7785858B2 (ja) | 自動運転支援装置、制御方法、プログラム及び記憶媒体 | |
| JP7267666B2 (ja) | 出力装置、地図情報記憶装置、自動運転制御装置、出力方法、プログラム及び記憶媒体 | |
| JP6369028B2 (ja) | 経路探索システム、経路探索方法及びコンピュータプログラム | |
| JP6273864B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP6323074B2 (ja) | 表示物情報表示装置 | |
| US20070225910A1 (en) | On-Vehicle Navigation System, Route Guide Method, And Computer-Readable Recording Medium | |
| JP6558129B2 (ja) | 走行支援システム、走行支援方法及びコンピュータプログラム | |
| US11333516B2 (en) | Lane guidance system and lane guidance program | |
| JP2019163969A (ja) | 車載器及び画像表示方法 | |
| JP2019096124A (ja) | 駐停車場所提案システム | |
| JP7464546B2 (ja) | 地図表示システム | |
| JP2020101422A (ja) | 運転支援装置および該方法 | |
| JP7381821B2 (ja) | 電子装置および情報提供方法、情報提供プログラム | |
| WO2018179599A1 (ja) | 情報提供装置 | |
| JP2007333654A (ja) | ナビゲーション装置 | |
| JP2016070768A (ja) | 車載装置 | |
| JP2011137723A (ja) | ナビゲーション装置、経路誘導方法、および、プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16768776 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017508367 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15560525 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |