WO2017046914A1 - 測位衛星選択装置、測位装置、測位システム、測位情報発信装置および測位端末 - Google Patents
測位衛星選択装置、測位装置、測位システム、測位情報発信装置および測位端末 Download PDFInfo
- Publication number
- WO2017046914A1 WO2017046914A1 PCT/JP2015/076469 JP2015076469W WO2017046914A1 WO 2017046914 A1 WO2017046914 A1 WO 2017046914A1 JP 2015076469 W JP2015076469 W JP 2015076469W WO 2017046914 A1 WO2017046914 A1 WO 2017046914A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- positioning
- time
- satellite
- unit
- satellites
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/24—Acquisition or tracking or demodulation of signals transmitted by the system
- G01S19/28—Satellite selection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/03—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers
- G01S19/07—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing data for correcting measured positioning data, e.g. DGPS [differential GPS] or ionosphere corrections
- G01S19/071—DGPS corrections
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/03—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers
- G01S19/08—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing integrity information, e.g. health of satellites or quality of ephemeris data
Definitions
- the present invention relates to a positioning system and a positioning apparatus using positioning satellites such as a Global Positioning System (GPS).
- GPS Global Positioning System
- the accuracy of the position to be measured and the quality of the position which is the accuracy, depend on the quality of the distance observation value for each satellite, it is desirable to discontinue satellites with large observation errors. Also, since the required number of channels and positioning calculation load increase as the number of satellites used increases, the upper limit of the number of satellites is determined according to the allowable number of channels of the terminal and the calculation load, and the quality of the position target position is the best. It is desirable to select and use a combination of satellites.
- the number of channels of the positioning terminal is wide from about 10 to 200 or more, and particularly for terminals with a small number of channels, it is important to determine the combination of satellites that receive signals.
- the positioning service that generates differential error correction information and provides it to the user, the number of satellites that can be subjected to error correction is limited according to the channel capacity, so the quality of the position of the user terminal is the best. As such, it is desirable to determine the combination of satellites on the service provider side.
- the quality of observation value of each satellite, elevation angle, visible time, precision degradation index (DOP: Dilution of Precision) determined from geometrical arrangement by combination of satellites, etc. are taken into consideration Be done.
- DOP precision degradation index
- a combination of positioning satellites that minimizes the error between the position calculated at the reference station and the predetermined true position is determined.
- a train position detection system is proposed that provides combination information to a train and the train selects a satellite signal included in the combination information from the received satellite signals to perform positioning.
- the conventional positioning system determines the combination of satellites at each time based on the independent evaluation for each time, satellites having a short continuous use time may be selected for the combination of satellites. If a satellite which can not use satellites continuously is selected by the positioning filter on the terminal side, the time required for reducing the error of the positioning data of the satellite can not be taken, the error becomes large, and stable positioning can not be performed.
- An object of the present invention is to perform stable positioning (take time necessary to reduce an error of positioning data of satellites) when selecting a satellite to be used from a large number of positioning satellites and performing positioning.
- a positioning satellite selection device is a positioning satellite selection device for determining a combination of positioning satellites for each time used for positioning at a position to be measured from signals transmitted from a plurality of positioning satellites.
- a positioning data acquisition unit that acquires positioning data including information and distance observation values, a satellite position calculation unit that calculates satellite positions for each time of positioning satellites from navigation information of the positioning data, and quality evaluation evaluating quality of positioning data
- a quality evaluation unit for obtaining a value, a shortest time designation unit for setting the shortest selection time, which is the shortest time for selecting positioning satellites, to a longer value as the quality evaluation value is worse, and a sky calculated from satellite positions of a plurality of positioning satellites Based on the accuracy degradation index obtained from the geometrical arrangement for each time above as an evaluation criterion, it is planned to set up a selection combination for each time on condition that it is selected longer than the shortest selection time.
- Parts and, and a plan storage unit for storing a program for selecting a combination of each time of the positioning satellites
- a positioning device comprises a positioning data acquisition unit for acquiring positioning data including navigation information and distance observation values of a plurality of positioning satellites, and a satellite position for calculating satellite positions for each time of positioning satellites from navigation information of positioning data.
- a positioning system is a positioning system comprising a positioning information transmission device and a positioning terminal, wherein the positioning data is acquired from a plurality of positioning satellites from a reference station which acquires positioning data including navigation information and distance observation values of positioning satellites.
- a positioning data acquisition unit, a satellite position calculation unit for calculating the satellite position for each time of the positioning satellite from navigation information included in the positioning data, and correction data for correcting an error included in the positioning data of the positioning satellite A data generation unit, a quality evaluation unit that obtains a quality evaluation value that evaluates the quality of correction data, and a shortest time specification unit that sets the shortest selection time, which is the shortest time to select positioning satellites, to a longer value as the quality evaluation value gets worse.
- a planning unit for planning a selected combination of positioning satellites used in positioning for each time, a planned storage unit for storing a selected combination of positioning satellites for each time, and a selection for each time, on condition that selecting for longer than time A positioning information transmission device having a positioning satellite included in the combination and a correction data output unit for outputting correction data of the positioning satellite, and a terminal positioning data acquisition unit for acquiring a distance observation value of the positioning satellite and navigation information at the positioning terminal
- a positioning terminal having a correction data acquisition unit for acquiring correction data of the positioning satellite from the positioning information transmission device, and a positioning operation unit for calculating the position using the distance observation value corrected by the correction data of the positioning satellite; It is a positioning system that can perform stable positioning.
- the satellite selection duration time is longer than the time required to reduce the error of the satellite positioning data, and is stable. Positioning can be performed.
- FIG. 1 It is a figure which shows the structural example of the positioning system by Embodiment 1 of this invention. It is a block diagram which shows the structural example of the positioning device by Embodiment 1 of this invention. It is a figure which shows the hardware constitutions of the positioning device by Embodiment 1 of this invention. It is a flowchart which shows an example of the positioning device process by Embodiment 1 of this invention. It is a flowchart which shows an example of the planning process by Embodiment 1 of this invention. It is a flowchart which shows an example of the process which allocates the same satellite to the peripheral time of the time which allocated the satellite in the planning process by Embodiment 1 of this invention.
- Embodiment 1 Conventional positioning systems determine the combination of satellites at each time based on independent evaluations for each time. For this reason, when the number of satellites selected is small relative to the number of positioning satellites to be evaluated, the temporal change of the combination becomes remarkable, and the individual satellites are continued with the terminal-side positioning filter. Unavailable In particular, in real time kinematic positioning (RTK: Real Time Kinematic) using carrier phase observation quantity and precise single positioning (PPP: Precise Point Positioning), the continuous use time of each satellite signal is measured against the magnitude of the observation error. If it is short, carrier phase ambiguity (uncertainty of integral multiple of wavelength) can not be determined because of random components of error, and centimeter-class positioning can not be performed using high-accuracy carrier phase observation amount.
- RTK Real Time Kinematic positioning
- PPP Precise Point Positioning
- RTK Real Time Kinematic
- PPP Precise Point Positioning
- the selection duration time of the satellite once selected for use in positioning is required to reduce the error of the positioning data of the satellite It takes longer than normal time and stable positioning can be performed.
- the time required to determine the carrier phase ambiguity can be secured according to the quality of the positioning data of the satellite, and stable centimetre class positioning can be performed.
- An object of the present invention is to perform stable positioning by reducing temporal change of a combination of satellites to be used when performing positioning by selecting satellites to be used from a large number of positioning satellites.
- the time required to determine the carrier phase ambiguity can be secured according to the quality of the positioning data of the satellite, and stable centimetre class positioning can be performed.
- the selection duration time of the satellite once selected for use in positioning is required to reduce the error of the positioning data of the satellite It takes longer than normal time and stable positioning can be performed.
- the time required to determine carrier phase ambiguity can be secured according to the quality of satellite positioning data, and it has not been possible in the past to be able to perform stable centimeter-class positioning. It produces a remarkable effect.
- FIG. 1 is a diagram showing an example of the configuration of an entire system including a positioning device 30 according to Embodiment 1 of the present invention.
- the positioning device 30 of the present embodiment is a device that receives the signal of the positioning satellite 10 and measures the position of the positioning target 20.
- a plurality of positioning satellites 10 exist in the sky, and the positioning device 30 selects a plurality of selected positioning satellites 11 to be actually used for positioning from among the plurality of positioning satellites 10 and positions the positioning target 20.
- Positioning The positioning target 20 is, for example, a mobile object such as a car, a motorcycle, a train, or an airplane.
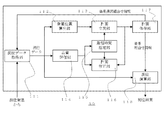
- FIG. 2 is a block diagram showing the configuration of the positioning device 30 according to the present embodiment.
- the positioning device 30 calculates the three-dimensional position of the satellite at any time using the navigation data acquired by the positioning data acquisition unit 111 for acquiring the positioning data from the positioning satellites 10 and 11 and the navigation data acquired by the positioning data acquisition unit 11 Position calculation unit 112, quality evaluation unit 114 for evaluating the quality of positioning data, shortest time designation unit 115 for setting the shortest selection time of selected positioning satellites 11, geometrically determined from the satellite positions obtained by satellite position calculation unit 112
- a plan drafting unit 113 for obtaining a selected combination of positioning satellites on the condition that the selection time for continuously selecting the selected positioning satellites 11 is selected longer than the shortest selection time, using the accuracy degradation index by arrangement as an evaluation index
- the position measurement operation is performed using the plan storage unit 117 stored (in the storage unit) as information and the positioning data of the positioning satellite 11 included in the selected combination information
- a positioning operation unit 118 is provided.
- the positioning data is data including navigation information transmitted from the positioning satellites 10 and 11, a distance observation value, and an error correction value of the distance observation value.
- the shortest time designation unit 115 sets the shortest selection time, which is the shortest time for selecting a positioning satellite, to a shorter value as the quality evaluated by the quality evaluation unit 114 is better. Specifically, the quality evaluation unit 114 obtains a quality evaluation value for evaluating the quality, and the shortest time designation unit 115 sets the quality evaluation value to a shorter value as the quality evaluation value is better and to a longer value as the quality evaluation value is worse.
- the positioning device 30 includes a plan correction unit 116 that corrects the plan between the current time and the correction time according to the quality evaluation value, stores the corrected plan in the plan storage unit 117, and the positioning operation unit 119 Alternatively, the selected combination of satellites may be acquired from the plan storage unit 117, and the measurement calculation of the self position may be performed using the positioning data of the positioning satellites 11 included in the combination. With this configuration, the plan is corrected by the plan correction unit 116 even after the plan combination unit 113 determines the selected combination, so that stable positioning can be performed continuously.
- the positioning data acquisition unit 111 receives the ranging signals transmitted by the positioning satellites 10 and 11, and acquires the distance observation value for the positioning satellite 11 and the navigation information of the positioning generations 10 and 11. At this time, when the number of channels for receiving positioning signals of satellites held by the positioning device 30 is smaller than the number of visible satellites, the selected combination of the current time is read out from the plan storage unit 117 and included in the selected combination. The ranging signal of the selective positioning satellite 11 is preferentially received. Also, when the computing capacity of the positioning device is lower than the ability to process all target signals, the ranging signal of the selected positioning satellite 11 similarly included in the selected combination is preferentially received.
- the range observation values may include both pseudo range observation values and both pseudo range observation values and carrier phase observation values.
- the frequency of the signal may be one frequency only or two or more frequencies.
- the navigation information may include both a Broadcast Ephemeris alone to calculate high precision position and clock errors, and an Almanac to calculate approximate positions of the calendar and satellites. . Also, instead of the navigation calendar, high precision orbit / time information provided by IGS (International GNSS Service) or the like may be used.
- IGS International GNSS Service
- the satellite position calculation unit 112 uses the navigation information acquired by the positioning data acquisition unit 111 to calculate the three-dimensional position on the sky of the satellite at an arbitrary time within the target time to be planned.
- the method of calculating the positions of the positioning satellites 10, 11 from the parameters included in the navigation information follows the procedure described in the specification provided by the organization operating each of the positioning satellites 10, 11.
- the plan drafting unit 113 obtains an accuracy degradation index from the geometric arrangement calculated from the position of each positioning satellite obtained by the satellite position calculation unit 112. Selection of a combination of satellites at each time so that the maximum value of the accuracy deterioration index at each time from the start time t start to the end time t end is minimized using the accuracy deterioration index obtained To plan.
- the shortest time in which each positioning satellite is continuously selected in time be longer than the time tshort designated by the shortest time designation unit 115 as a constraint.
- the time interval for determining the selected combination of satellites is, for example, 30 seconds in consideration of the change in the geometrical arrangement of the satellites.
- PDOP Position Dilution of Precision
- PDOP at the position of the positioning device 30 is expressed as follows using the angle of elevation el i and azimuth az i relative to the measurement device 30, which is calculated from the position of the satellite i in the selected combination.
- n is the number of satellites included in the combination.
- Q is a covariance matrix determined from the observation matrix H
- q11, q22, and q33 are dispersions of position estimated values in the horizontal direction (two axes) and the vertical direction, respectively.
- H it is (H T H) ⁇ 1
- determinants of q11 to q44 as shown in Equation 2.
- Equation (3) With elevation el i and azimuth az i relative to the measurement device 30, which is calculated from the position of the satellite i, H is expressed as Equation (3).
- Each row vector (1 ⁇ 4) of the H matrix is composed of a gaze direction unit vector (1 ⁇ 3) for each satellite and a numerical value 1 for estimation of the receiver clock error.
- HDOP Horizontal Dilution of Precision
- VDOP Vertical Dilution of Precision
- HDOP is obtained by the square root of the sum of q11 and q22
- VDOP is obtained by the square root of q33.
- DOP DOP
- HDOP HDOP
- VDOP accuracy degradation index
- the quality evaluation unit 114 evaluates the quality of the positioning data of each of the positioning satellites 10 and 11 acquired by the positioning data acquisition unit 111, and obtains a quality evaluation value that is an index value of the quality of the positioning data of each satellite.
- the quality evaluation unit 114 temporarily calculates positioning data for evaluating the quality of positioning data, not distance measurement values, but position measurement data for use in actual positioning calculation, and distance observation values. In order to obtain a distance observation value for quality evaluation, the distance observation value obtained by the quality evaluation unit 114 is referred to as a pseudo distance observation value.
- the pseudo-range is an observation value of a positioning code string (C / A code, P2 code, etc.) in which the propagation time until the signal transmitted from the satellite reaches the receiver is carried on the carrier of the signal.
- the distance between the satellite and the receiver calculated from the phase difference between the values of the same positioning code string generated in synchronization with the clock of the satellite and the same reference time as the satellite clock, and multiplied by the speed of light is there.
- the synchronization with the reference time of the receiver clock and the satellite clock has an error, and the obtained distance includes an error due to the shift of the clock, so it is called a "pseudo" distance.
- the least square residual when positioning is performed by the least square method using pseudorange observation values of all positioning satellites that is, the minimum of pseudorange observation values of all positioning satellites Squared residuals can be used.
- the following equation can be used for the least squares residual of pseudorange observation values of all positioning satellites.
- y vector is a column vector composed of pseudorange observation values of each positioning satellite
- v vector is a column vector composed of least squares residual of pseudorange observation values of each positioning satellite
- H is an equation
- the matrix calculated from the elevation angle and the azimuth angle of each satellite as in No. 3 is an error matrix of pseudo range observation values.
- an ambiguity Fix an integer value of integer multiples of the wavelength which was indefinite can be solved and can be used as a fixed value
- the evaluation index can be calculated regardless of the presence or absence of
- the carrier phase observation value is the phase of the carrier wave tracked at the time of observation of the positioning code string used for measurement of the pseudorange, and the same carrier wave signal generated in synchronization with the clock of the receiver at the same reference time as the satellite clock.
- Phase difference of The phase difference has an ambiguity of 2 ⁇ ⁇ N (N is a wave number and an integer value).
- N is a wave number and an integer value.
- the following equation can be used as the observation pre-update residual of the L1 carrier phase.
- the y vector is a column vector composed of L1 carrier phase observation values of each satellite
- the z vector is a column vector composed of state estimation values before the observation update by the y vector.
- x i , y i and z i indicate the position of the i-th positioning satellite i
- ⁇ L1 indicates the wavelength (0.1903 [m]) of the L1 carrier wave.
- the z vector includes the position x r , y r , z r of the positioning device 30, the m-converted clock error ⁇ t r , and the ambiguity N r i for the i-th positioning satellite i.
- the subscript r indicates that it is a term for the receiver.
- H ⁇ in Equation 6 is an observation model.
- Equation (6) is the residual before observation update (the difference between the actual observation value and the state estimate before update and the predicted observation value calculated from the observation model), equation (7) is the observation model, and equation (8) is Indicates state quantities to be estimated.
- the residual before observation update in the Kalman filter similar to the equation 6 may be used.
- the residual before observation update it is possible to detect a sudden change in the observation amount in a short time interval, so even when the number of positioning satellites 10 and 11 used is small, the quality due to environmental changes such as strong multipath Deterioration can be detected.
- the least squares residual of Equation 5 may be used as an evaluation index of carrier phase observables. Since the evaluation indexes of Equations 5 and 6 include the positions of the positioning satellites 10 and 11, it can be considered that the quality evaluation of navigation information for calculating the positions of the positioning satellites 10 and 11 is simultaneously performed.
- each positioning satellite provided by a general differential navigation GNSS (Global Navigation Satellite System) service Distance measurement accuracy information (URA: User Range Accuracy) may be used as a quality evaluation index.
- the URA can be calculated from the message defined in “RTCM STANDARD 10403. 2 Differential GNSS (Global Navigation Satellite Systems) Services-Version 3, February 1, 2013. (page 11, 81)”.
- the shortest time designation unit 115 causes the planning unit 113 to designate the shortest selection time tshortest , which is the shortest time in which the positioning satellites 10 and 11 are successively selected in time.
- the shortest selection time tshort is determined according to the quality evaluation value of the positioning data of each positioning satellite calculated by the quality evaluation unit 114. Specifically, for example, as in the following equation, the shortest time t shortest may be determined by multiplying the variance of the observation residuals of the positioning satellites 10 and 11 whose observation residuals are equal to or less than the threshold by a proportional coefficient a. it can.
- v is an observation residual
- n is the number of positioning satellites 10 and 11 whose observation residual is less than or equal to a threshold.
- an average value may be used, a root mean square (RMS) may be used, a maximum value may be used, or other statistics may be used. It is good.
- RMS root mean square
- the proportionality factor a is given by, for example, the following equation, where ⁇ rand [m] is the target value of the level of the random error that is reduced by continuously processing the observation values of the positioning satellites 10 and 11 and ⁇ t is the sample interval .
- Equation 10 uses the fact that the level of random error decreases in inverse proportion to the number of observations.
- the variance may be calculated from the evaluation value of the observation residual at 1 epoch, which is one data acquisition interval in interference positioning. Further, the variance may be calculated from the evaluation value in the past several seconds to several hours.
- the threshold of the evaluation value (the threshold of the observation residual when obtaining the observation residual of the positioning satellite whose observation residual is less than the threshold)
- the observation error standard deviation per unit weight calculated from the observation error matrix It may be three times the standard deviation obtained from the variance value.
- the observation error standard deviation per unit weight can be obtained, for example, by the following equation.
- ⁇ i is each eigenvalue of the observation error matrix R diagonalized by unitary transformation.
- the shortest selection time may be given a value based on experience independently of the evaluation value of the positioning data of each epoch.
- the shortest time obtained by multiplying the maximum value of the ranging accuracy of the positioning satellite whose ranging accuracy is less than or equal to the threshold value is multiplied by the proportional coefficient It can be done.
- the maximum value other statistical values such as an average value may be used.
- the plan correction unit 116 corrects the plan between the current time and the correction time t modify according to the quality evaluation value. If the positioning satellite 11 included in the plan of the selected combination at the current time includes a positioning satellite whose quality evaluation value of the positioning data output by the quality evaluation unit 114 exceeds the threshold (bad evaluation), it is corrected from the current time During time t modify , the positioning satellites 11 are removed from the combination, and with other positioning satellites 10 not exceeding the threshold, positioning satellites 10 not included in the selected combination are newly added to the combination. In addition, when the evaluation value of positioning data can not be acquired, it is handled as the case where a threshold is exceeded.
- the modification time t modify refers to the time from the current time to the end time for modifying the plan.
- modification time t modify make the modification time t modify the shortest selection time t shortest so that the selection time of the added selected satellite 11 is always longer than the shortest selection time, and plan at the time interval of the modification time t modify You may fix it.
- a satellite whose evaluation value exceeds the threshold may be excluded from the selection which is the time from the current time until the nearest time when the selection is not selected.
- the time to be excluded from selection may be compared with the shortest selection time tshortest, and the maximum value may be taken as the modification time tmodify .
- the positioning data acquisition unit 111 is executed again to acquire the positioning data of the corresponding positioning satellite 10, and the quality evaluation unit 114 is executed again.
- the quality evaluation unit 114 is executed again.
- For correction of the plan similarly to planning of the plan by the planning unit 113, using the accuracy degradation index by geometrical arrangement calculated from the position of each positioning satellite 10, from the current time of the accuracy degradation index at each time
- the satellite combinations at each time are modified so that the maximum value during the modification time t modify is minimized.
- the constraint is that the shortest time during which each satellite is continuously selected in time is longer than the shortest selection time t shortest specified by the shortest time designation unit 15.
- the plan storage unit 117 stores the selection plan of the selected combination of the positioning satellites 10 and 11 prepared by the plan making unit 113. If the plan correction unit 116 corrects the plan, the plan correction unit 116 overwrites the saved selected combination plan with the corrected plan.
- the selection plan of the positioning satellites 10 and 11 is stored in a data structure in which the satellite selected at each time from the start time t start to the end time t end is known. For example, a satellite list at each time may be defined and stored, or a two-dimensional array of the total number of times ⁇ one total number of positioning satellites is defined, and the i-th satellite is selected as the t-th time The value of the [t, i] element of the array may be expressed as 1 or 0 if not selected.
- the positioning operation unit 118 acquires the combination of the selected positioning satellites 11 from the plan storage unit 117, and uses the positioning data of the selected satellite 11 included in the selected combination among the positioning data of each satellite acquired from the positioning data acquisition unit 111. Calculation of the position of the positioning target.
- the positioning operation unit 118 uses the pseudo range observation value or the carrier wave phase observation value for the four or more positioning satellites 11 corrected using the information on the satellite clock error included in the navigation calendar, and the positioning target of the positioning device 30 Calculate the position of.
- observation values such as the above-mentioned pseudo-range observation values and carrier phase observation values, observation values to which error correction values obtained from the outside provided by a quasi-zenith satellite etc. may be used.
- the procedure for correcting the error follows the procedure described in the specifications provided by each positioning satellite 10, 11 and the organization operating each service. For example, when using only the pseudorange observations of 1 frequency, by the following method of least squares, to estimate the position x r, y r, z r , and clock error .sigma.t r of the positioning device 30.
- the y vector is a column vector composed of pseudorange observation values of each satellite
- the z vector is a column vector composed of state estimation values.
- the position x r , y r , z r of the positioning device 30 , and the clock error ⁇ t r and to estimate the ambiguity N L1r i, N L2r i for each satellite.
- ⁇ L1 and ⁇ L2 indicate the L1 carrier wave (0.1903 [m]) and the wavelength of the L2 carrier wave (0.2442 [m]), respectively.
- the z vector includes the position x r , y r , z r of the positioning device 30, the m-converted clock error ⁇ t r , and the ambiguity N r i for the i-th positioning satellite i.
- the estimated ambiguity can be integerized by applying a method such as LAMBDA (The Least Squares Ambiguity Decorrelation Adjustment) or the like, whereby the positioning device 3 of the positioning device 3 can be obtained in a centimeter grade.
- LAMBDA The Least Squares Ambiguity Decorrelation Adjustment
- an estimation filter such as a Kalman filter may be used in addition to the same least squares as described above.
- FIG. 3 is a diagram showing a hardware configuration of the positioning device 30 according to the first embodiment.
- the positioning antenna 151 receives the signals of the positioning satellites 10 and 11.
- the received data demodulation unit 152 amplifies the signal received by the positioning antenna 151, performs frequency conversion and the like, performs AD conversion and digitization, and performs code demodulation and the like.
- the arithmetic processing unit 153 having received the signal of the reception data demodulation unit 152 performs arithmetic operations such as demodulation of navigation information, satellite orbit operation, position operation and the like.
- the storage unit 154 temporarily stores data when performing an operation, or stores data such as a selected combination list.
- the output unit 155 outputs the result calculated by the calculation processing unit 153 or the data stored in the storage unit 154 to the outside according to an instruction of the calculation processing unit 153.
- This output is an output to a display device such as a display, and provides information to an external device through an interface as a signal.
- the output also includes an indication of the position on the map.
- the positioning data acquisition unit 111 is executed by the positioning antenna 111 and the reception data demodulation unit 152. Calculation of final navigation information and distance observation value is performed using the arithmetic processing unit 153.
- the satellite position calculation unit 112, the quality evaluation unit 114, the shortest time designation unit 115, the plan making unit 113, the plan correction unit 116 and the positioning operation unit 118 are mainly processed by the processing unit 153.
- the result of arithmetic processing of the positioning data, quality evaluation value, shortest selection time, selected combination information, positioning operation result, etc. by the arithmetic processing unit 153 is stored in the storage unit 154.
- the plan storage unit 117 stores the plan of the selected combination in the storage unit 154.
- the processing of the arithmetic processing unit 153 in FIG. 3 reads the program stored in the storage unit 154, and the satellite position calculation unit 112, the quality evaluation unit 114, the shortest time designation unit 115, the plan making unit 113, and the plan correcting unit 116.
- the processing of the positioning operation unit 118 may be performed.
- the processing circuit that performs processing of each part may be configured by dedicated hardware and realized by a single circuit, a complex circuit, a programmed processor, a processor programmed in parallel, an ASIC, or an FPGA.
- the storage unit 154 corresponds to, for example, nonvolatile or volatile semiconductor memory such as RAM, ROM, flash memory, EPROM, EEPROM, magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD, etc. Do.
- FIG. 4 is a flowchart showing an example of processing of the positioning device 30 according to the first embodiment.
- the positioning device 3 process of FIG. 4 starts, for example, when the positioning device 3 is powered on.
- step S11 If the positioning data acquisition unit 111 does not acquire positioning data from the positioning satellites 10 and 11 (step S11; NO), it repeats step S11 and waits for acquisition of positioning data.
- step S11; YES the positioning data acquisition part 111 acquires the distance observation value with respect to several positioning satellites 10 and 11, and the navigation information of the positioning satellites 110 and 11.
- FIG. 1 A block diagram illustrating an exemplary computing environment in accordance with the present disclosure.
- the quality evaluation unit 114 evaluates the quality of the positioning data of each positioning satellite 1 acquired by the positioning data acquisition unit 111. As a result of the evaluation, if there are satellites whose quality evaluation value exceeds the threshold among the satellites included in the combination plan at the current time, and it is determined that the plan correction is necessary (step S12; YES), the plan correction unit 116 The satellite selection combination plan is modified from the current time to the modification time t modify (step S13).
- the plan correction process is a loop.
- the thread processing may be independent, and in the current loop, processing may be performed to remove satellites whose quality evaluation value exceeds the threshold from the selection combination.
- step S14 if the current time is the time to perform planning for the next time slot (after the plan end time t end ) (step S14; YES), the plan drafting unit 113 starts a new plan from the current plan end time t end A plan of selection combinations of positioning satellites up to the end time t end 'is formulated (step S15).
- each satellite position calculated by the satellite position calculation unit 112 and the shortest selection time determined by the shortest time designation unit 115 from the quality of the positioning data are used.
- the process of planning is performed as a thread process independently of the loop in the process of the positioning device 30 of FIG. 4, and after the process of planning is completed, the plan of the selected combination is stored in the plan storage unit 117.
- the next time slot (after the current plan end time t end ) It is desirable that the time for performing the planning is set to a time before (t planning + t modify ) or more from t end .
- t planning is the time required for planning.
- the time from the current planned end time t end to the next new planned end time t end ' may be, for example, one hour.
- the positioning operation unit 118 performs measurement operation of the position of the positioning target using the positioning data of the positioning satellite 11 included in the selected combination among the positioning data of each satellite (step S16).
- the position of the positioning target may be the position of the positioning device itself.
- step S11 If the power is not off, the process returns to step S11 and repeats steps S11 to S16. When the power is turned off, the process ends.
- FIG. 5 is a flow chart showing an example of a planning process of selection combinations of positioning satellites according to the first embodiment.
- the planning process of FIG. 5 is started when step S15 of FIG. 4 is executed.
- the satellite position calculation unit 112 calculates the three-dimensional position of the satellite from the start time t start to the end time t end from the navigation information of each of the positioning satellites 10 and 11 included in the positioning data, and the elevation angle to the position of the positioning device 30 El and the azimuth az are calculated (step S22).
- the following processing is processing performed by the planning unit 113.
- the planning unit 113 performs processing of adding a positioning satellite 10 with a good geometric arrangement to the selected combination with priority from the time when the accuracy degradation index due to the geometric arrangement is large, that is, the time when the accuracy degrades.
- the calculation of the accuracy degradation index requires at least four aircraft, and there are positioning satellites that become a basic component of combination, such as a high elevation quasi-zenith satellite in Japan. From this, first, the positioning satellite 10 having the smallest accuracy deterioration index is allocated to each time without considering the accuracy deterioration index of the final selected combination of positioning satellites 10 (step S23).
- the minimum number of the selected positioning satellites 11 may be four, and the positioning satellites 10 may be allocated in descending order of the elevation angle at each time.
- the priority of the positioning satellite system of the positioning satellite 10 to be selected is changed, for example, in Japan, East Asia and Oceania, only high elevation quasi-zenith satellites and GPS satellites, and high elevation in Europe high latitude area You may assign only GLONASS satellites.
- signals from satellites of high elevation angle are unlikely to be blocked by a building or the like regardless of the environment of the positioning terminal, and the quality is also good.
- the shortest time during which each positioning satellite is selected continuously in time is longer than the shortest selection time tshortest specified by the shortest time designation unit 15, After assigning the satellites in each high elevation angle order, assign the same satellite to the combination of the peripheral time.
- FIG. 6 is a flow chart showing an example of the process of allocating the same positioning satellite p to the peripheral time at the same time when one positioning satellite p is allocated to the time t in the planning process of the first embodiment.
- a selection combination of time zones hereinafter also referred to as peripheral time
- the peripheral time is a time interval of the shortest selection time t shortest as time before and after the time of allocating the positioning satellite p to be selected.
- Time t is the time at which the positioning satellite 10 is to be assigned. Let the time difference with respect to time t be a time difference dt.
- the time difference dt has, as one unit, a time interval for selecting a combination of positioning satellites in planning.
- Break in the block following step S31 means ending the loop and returning to the upper process.
- step S32 adds the positioning satellite p to time t + dt, here to the selected combination list.
- the assignment of positioning satellites to the peripheral time is first considered with respect to the time before time t.
- step S33 is (1) The time (t + dt-1) (one unit is a unit where the time interval for determining the selected combination is 1) before the start time, which is one unit before the time t at which the positioning satellite p is allocated (t + dt-1) (2) that the positioning satellite p is visible at time (t + dt-1) (3) the difference dt-1 between time t and time (t + dt-1) is less than half the shortest selection time t shortest ( 4) It is determined whether or not the number of positioning satellites already allocated at the time (t + dt-1) satisfies all conditions of being less than the upper limit of the number of positioning satellites selected simultaneously.
- step S33 If any of the above (1) to (4) is not satisfied in step S33 (step S33; NO), satellite allocation for the time before time t is ended, and satellite allocation for the time after time t To start.
- the process returns to the Break determination block as Break at step S33, determines as Break, and the process moves to step S35.
- Step S 35 records the current dt value of the previous loop in dt begin as the earliest time of assignment, and the last time difference d t begin of the assignment and the time after the shortest selection time t shortest .
- Step S36 is (5) The time (t + dt + 1) one after the time when the positioning satellite is allocated is earlier than the end time (6) The time when the positioning satellite p is visible at time (t + dt + 1) (7) time (t + dt + 1) Then, it is determined whether the number of already allocated positioning satellites satisfies all conditions of being less than the upper limit of the number of positioning satellites selected simultaneously.
- step S36 If all the above conditions (5) to (7) are satisfied (step S36; YES), the process proceeds to step S37.
- the positioning satellite p enters the selection combination list of times satisfying the above conditions (5) to (7) and the time difference dt ⁇ dt upper . If the conditions (5) to (7) are satisfied, the positioning satellite p will be planned in the selected combination from the time t + dt begin at which the positioning satellite p is added most recently to the time t + dt upper .
- step S36 causes a Break, and the process returns to the Break determination block, determines that it is a Break, and the process moves to Step S38.
- the process proceeds to step S38.
- the above step S33 adds the positioning satellite p to the selected combination list at time t + dt on condition that the time difference dt at time t is not more than half the shortest selection time t shortest (condition (3)). As a result of examining the time after time t, the positioning satellite p becomes invisible, etc.
- the time difference dt end of the assigned last time and the time difference dt begin of the earliest time are May be shorter than the shortest selection time tshortest .
- step S39 if the difference between the assigned last time and the earliest time is shorter than the shortest selection time tshortest , then the positioning satellite is compared with the time earlier than the earliest time (t + dt begin ) Whether or not to allocate p is additionally determined. Therefore, the process moves to step S310. Further, step S39 ends the process of assigning positioning satellites to the peripheral time, when the difference between the assigned last time and the earliest time is longer than the shortest selection time tshortest .
- step S311 is (8)
- the positioning satellite p is visible when the preceding time (t + dt-1) is later than the start time (9) time (t + dt-1) (10) time (t + dt-1)
- the difference between the allocated last time t end is equal to or less than the shortest selection time t shortest (11)
- Time (t + dt-1) upper limit of the number of positioning satellites simultaneously selected Determine whether all the conditions of being less than or not are satisfied.
- step S311 If all the above conditions (8) to (11) are satisfied (step S311; YES), the process proceeds to step S312.
- the positioning satellite p enters the selection combination list of times satisfying the above conditions (8) to (11).
- step S311 If one of the conditions (8) to (11) is not satisfied (step S311; NO), the process proceeds to step S313.
- a step S313 substitutes a new time difference dt for the time difference dt begin of the earliest time to be allocated, and ends the process of allocating positioning satellites to the peripheral time.
- the satellite p is added to the selected combination from time t + dt begin to time t + dt end by the satellite allocation process to the peripheral time shown in FIG.
- step S24 and subsequent steps after the allocation of the smallest satellite (step S23) in the planning process of FIG. 5 will be described.
- Step S24 is (1) The number of selected satellites is less than the upper limit between the start time t start and the end time t end for which allocation of selected satellites is required (2) The number of satellites selected in (1) above If the condition is satisfied that there is an unselected visible satellite among times below the upper limit, the process moves to step S25. The step S24 shifts the processing to the step S26 when the above condition (1) (2) is not satisfied.
- Step S25 selects the time when the deterioration index (DOP) of the geometric arrangement by the selected positioning satellite 11 is the largest among the times when the number of satellites selected in the above (1) is less than the upper limit. Furthermore, at the time when the deterioration index (DOP) of the geometric arrangement becomes maximum, the positioning satellite 10 with the smallest deterioration index (DOP) by adding it to the selected combination among the unselected and visible positioning satellites 10 Ask for Next, by adding, the positioning satellite with the smallest degradation index (DOP) is added to the selection combination list of times when the degradation index (DOP) becomes the maximum.
- DOP deterioration index
- step S26 allocates and adds the same positioning satellite to the selected combination list at the peripheral time of the additional time using the processing of allocating the positioning satellite to the peripheral time.
- step S24 The process from step S24 to step S26 is performed until the time when the number of selected satellites is less than the upper limit disappears or the time when the number of selected satellites is less than the upper limit is between the start time t start and the end time t end . The process is repeated until there are no unselected and visible positioning satellites.
- step S24 when the number of positioning satellites selected at all times reaches the upper limit, or when the number of selected satellites is less than the upper limit, there are no positioning satellites not selected and visible (step S24; NO) Then, the process proceeds to step S27.
- a step S27 saves the selected combination list in the plan storage unit 117 and ends the planning process.
- Step S27 overwrites the satellite selection plan, ie, the selected combination list, in the plan storage unit 117 if there are other visible satellites that can be added even if there are times when the selected number of positioning satellites is less than the upper limit. End the process.
- the above is the processing performed by the planning unit 113.
- FIG. 7 shows a flowchart showing an example of a plan correction process of satellite combination selection according to the first embodiment.
- the plan correction process of FIG. 7 is started when step S15 of FIG. 4 is executed.
- step S 42 uses the satellite position calculation unit 112 to calculate the three-dimensional position of the positioning satellite from the current time to the modification time t modify from the navigation information of each positioning satellite 11 included in the positioning data
- the elevation angle el and the azimuth angle az with respect to the position of the positioning device 30 are calculated.
- step S43 evaluation value of the positioning data output from the quality evaluation unit 114, during the current time corrected from the time t the modify of the bad positioning satellite 10 the quality of positioning data in the current plan exceeds the threshold, the Remove the satellites at time from the combination.
- step S44 There is a time when the number of selected satellites is less than the upper limit from the current time for assignment of selected satellites to the modification time t modify (2)
- the number of satellites selected in (1) is the upper limit If the condition that there is an unselected visible satellite among the times less than is satisfied (step S44; YES), the process moves to step S45.
- the step S44 shifts the processing to the step S46 when the above condition (1) (2) is not satisfied.
- Step S45 selects the time when the deterioration index (DOP) of the geometric arrangement by the selected positioning satellite 11 is the largest among the times when the number of satellites selected in (1) above is less than the upper limit. Furthermore, at the time when the deterioration index (DOP) of the geometric arrangement becomes maximum, the positioning satellite 10 with the smallest deterioration index (DOP) by adding it to the selected combination among the unselected and visible positioning satellites 10 Ask for Next, by adding, the positioning satellite with the smallest degradation index (DOP) is added to the selection combination list of times when the degradation index (DOP) becomes the maximum. However, in this case, the positioning satellites excluded from the combination in step S43 are excluded from additional targets.
- step S46 assigns the same satellite to the selected combination list at the time around the time when the satellite is added, using the satellite allocation process to the peripheral time (FIG. 6).
- step S44 The process from step S44 to step S46 is not selected until the time when the number of selected satellites is less than the upper limit disappears or the number of selected satellites is less than the upper limit during the time from the current time to the modification time t modify The process is repeated until there are no visible positioning satellites.
- step S44 when the number of positioning satellites selected at all times reaches the upper limit or when the number of selected satellites is less than the upper limit, there are no positioning satellites that are not selected and visible (step S44; NO) Then, the process proceeds to step S47.
- a step S47 saves the selected combination list in the plan storage unit 117, and ends the planning process.
- Step S27 overwrites the satellite selection plan, ie, the selected combination list, in the plan storage unit 117 if there are other visible satellites that can be added even if there are times when the selected number of positioning satellites is less than the upper limit. End the process.
- the above is the processing performed by the plan correction unit 114.
- the processes in steps S44 to S47 are the same as the processes in steps S24 to S27 of the plan drafting unit 113 in FIG.
- a positioning satellite selection device for obtaining a selection combination of the positioning satellites for each time used for positioning at a position from signals transmitted from a number of positioning satellites using the above components It can also be configured as 31.
- the positioning satellite selection device 31 evaluates the quality of positioning data, the positioning data acquisition unit 111 acquiring positioning data including navigation information of a plurality of positioning satellites 10 and 11, a distance observation value, and an error correction value of this distance observation value.
- the quality evaluation unit 114 the shortest selection time which is the shortest time to select the positioning satellite 11, is set to a longer value as the quality is worse, and the selection time is longer than the shortest selection time when selecting the positioning satellite.
- a plan storage unit for storing a plan of the selected combination for each time of the positioning satellite, which obtains a selected combination for each time on the condition of.
- the positioning satellite selection device 31 can be considered to be the configuration of the positioning satellites 30 with the positioning operation unit 118 removed.
- the positioning satellite selection device 31 can be provided with a satellite position calculation unit 112 and a plan correction unit 116.
- the selection duration time of the satellites is longer than the shortest necessary time according to the quality of the satellite positioning data, and stable positioning can be performed.
- the time required to determine the carrier phase ambiguity can be secured according to the quality of the positioning data of the satellite, and stable centimetre-class positioning can be performed.
- the positioning device 30 determines the position of the positioning target 20 by determining the selected combination of the positioning satellites 11.
- the position of the positioning target is stabilized using the information from the reference station which receives the positioning data from the positioning satellite and transmits the received information. The positioning system for positioning is described.
- a positioning information transmitting device for determining and transmitting positioning information to be used in a positioning terminal using information from a reference station
- a positioning terminal for receiving information from the positioning information transmitting device and positioning the position of a positioning target
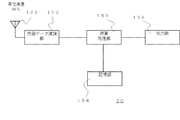
- FIG. 8 is a diagram showing the configuration of a positioning system 200 of the second embodiment.
- positioning satellites 10 and 11 are the same as positioning satellites 10 and 11 of the first embodiment.
- the reference station 40 has known exact coordinate positions, receives positioning data of the positioning satellites 10 and 11, and transmits this positioning data.
- the positioning system 200 acquires the positioning data received by the reference station 40 and selects the positioning combination 11 for selecting the positioning satellite 11 used in positioning and the positioning information transmitting device 50 for obtaining correction data, and the positioning received at the position of the positioning target 20 It is comprised from the positioning terminal 60 which measures the position of positioning object 20 from data, (selection combination), and correction data.
- the positioning information transmission device 50 can be configured to exist independently of the positioning target 20 and to mount the positioning terminal 60 on the movable positioning target 20.
- the multifunctional positioning satellite 17 can uniformly distribute information from a high altitude, and can therefore transmit correction data and the like to the positioning terminal 60 existing in a wide range. Moreover, even if the positioning target 20 moves to a wide range, the positioning terminal 60 mounted on the positioning target can receive the correction data.
- the multifunctional positioning satellite 17 is in an orbit higher in altitude than the positioning satellites 10 and 11.
- the multifunctional positioning satellite 17 can be a so-called quasi-zenith satellite having an orbit passing through Japan's zenith (directly above).
- FIG. 9 shows a configuration example in the case where correction data is transmitted from the positioning information transmitting device 50 to the positioning terminal 60 by means different from the multi-function positioning satellite 17 of FIG.
- the positioning satellites 10 and 11, the reference station 40, the positioning information transmission device 50, the positioning target 20, and the positioning terminal 60 in FIG. 9 are the same as those in FIG.
- the positioning information transmission device 50 does not transmit correction data to the positioning terminal 60 via the multi-function positioning satellite 17, but transmits using a wired or wireless communication line 80 such as the Internet or a public line. You may. It is suitable for transmitting correction data in an area where there are no multifunctional positioning satellites 17 such as quasi-zenith satellites.
- the positioning information transmission device 50 and the positioning terminal 60 may be configured to switch to the configuration of FIG. 8 to FIG.
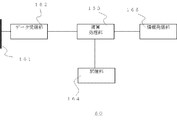
- FIG. 10 is a block diagram showing a configuration example of the positioning information transmission device 50 according to the second embodiment.
- the positioning information transmission apparatus 50 acquires positioning data from the reference station 40 which acquires positioning data including navigation information and error information from a plurality of positioning satellites 10 and 11, and navigation information included in the positioning data.
- a satellite position calculation unit 112 that calculates the positioning satellite position for each time of the positioning satellites 10 and 11, a correction data generation unit 120 that generates correction data that corrects an error included in the positioning data of the positioning satellites 10 and 11, Quality evaluation unit 114 for obtaining a quality evaluation value for evaluating the quality of data, and a shortest time designation unit for setting the shortest selection time, which is the shortest time for selecting positioning satellites 11 used for positioning, to shorter values as the quality evaluation value is better Evaluation criteria for the accuracy degradation index obtained from the geometrical arrangement of each time on the sky calculated from the satellite positions of a plurality of positioning satellites 10, 11 and 115
- the planning unit 113 plans a selection combination for each time of the positioning satellites 11 used in positioning under the condition that it is selected longer than the shortest selection time of the positioning satellites 10 and 11, and the selection combination for each time of the positioning satellites 11
- a correction data output unit 121 for outputting correction data of the positioning satellites 11 included in the selected combination.
- the positioning information transmission device 50 includes a correction data generation unit 120 and a correction data output unit 121.
- the positioning terminal 60 includes a terminal positioning data acquisition unit 131, a correction data acquisition unit 122, and a positioning operation unit 118.
- the positioning information transmission device 50 generates correction data for correcting an error included in the positioning data acquired by the positioning terminal 60 from the positioning satellite 11 using the positioning data acquired from the reference station 40, and delivers the multifunctional positioning satellite 17 etc.
- the correction data is provided to the positioning terminal 60 using a means.
- the positioning terminal 60 measures the positioning target using the positioning data acquired from the positioning satellite 11 by the positioning terminal 60 and the correction data acquired from the positioning information transmitting apparatus 50 via the distribution means such as the multifunctional positioning satellite 17. Perform an operation.
- the positioning terminal 60 includes a correction data acquisition unit 122 for acquiring correction data transmitted from the positioning information transmission device 50, a positioning data acquisition unit 111 for acquiring the distance observation value of the positioning satellite 11 and navigation information, and correction using correction data.
- a positioning operation unit 118 is used to calculate the position using the distance observation value.
- the positioning device 30 performs positioning according to the positioning of the positioning satellites 10 and 11 and the positioning data acquiring unit 111 according to the geometrical arrangement of the positioning satellites 10 and 11 and the quality of the positioning data.
- the operation unit 18 determines a combination of positioning satellites 11 used for the positioning operation.
- the positioning system 200 according to the second embodiment determines the combination of satellites to be corrected based on the correction data by the processing corresponding to the geometrical arrangement of the positioning satellites 10 and 11 and the quality of the positioning data in the same manner. Do.
- the positioning data acquisition unit 111 acquires positioning data of each of the positioning satellites 10 and 11 from the reference station 40.
- a line such as the Internet may be used to acquire positioning data.
- the positioning data to be acquired are the distance observation values for the positioning satellites 10 and 11 and the navigation information of the positioning satellites 10 and 11, as in the first embodiment.
- the positioning data may be acquired from a plurality of reference stations 40 in order to make the correction data effective in a wide area. For example, in the case of Japan, the reference station 40 may be obtained from these reference stations because there are approximately 1300 points nationwide.
- the satellite position calculation unit 112 is the same as the operation of the satellite position calculation unit 112 of the positioning device 30 of the first embodiment.
- the satellite position calculation unit 112 uses the navigation information acquired by the positioning data acquisition unit 111 to calculate the three-dimensional position on the sky of the satellite at an arbitrary time within the target time to be planned.
- the planning unit 113 uses the accuracy deterioration index by geometrical arrangement calculated from the position of each satellite, and the accuracy deterioration index at each time Plan the selection of satellite combinations at each time such that the maximum value from the start time t start to the end time t end is minimized.
- the position used for calculation of the elevation angle el i and the azimuth angle az i of the satellite i used to calculate the DOP is the position of the positioning target 20 or the positioning terminal 60 uses the correction data.
- the position of the positioning target 20 is unknown, or when there are a plurality of positioning targets 20 using correction data
- the average value of the position of the reference station 4 or the positions of the plurality of positioning targets 20 may be used.
- the position of a representative point of the target area such as the average value of the positions of the reference stations 4 may be used.
- the area for providing correction data is wide (for example, all over Japan)
- the value of the accuracy degradation index due to the geometric arrangement, or if the visibility of each satellite becomes significantly different depending on the location A representative point may be determined for each subarea, and a plan for satellite selection may be made for each subarea. For example, the whole of Japan can be divided into 10 subareas.
- the correction data generation unit 120 corrects an error included in the positioning data of each satellite from the positioning data of the positioning satellites 10 and 11 acquired from the reference station 40 and the accurate position coordinate value of the reference station 40 which is known. Generate
- the pseudorange correction value for correcting the pseudorange observation value for the positioning satellite 11 and the carrier phase correction value for correcting the carrier phase observation value are calculated by the following equation, and the pseudorange correction value and the carrier phase correction value As correction data.
- the position coordinate values of the reference station 40 may be coordinate values separately obtained by static surveying or daily coordinate values of an electronic reference point provided by an organization such as the Geographical Survey Institute.
- x i , y i , z i are three-dimensional positions of satellite i calculated from navigation information included in positioning data
- x r , y r , z r are three-dimensional positions of reference station 40
- P r i and ⁇ r i are pseudo-ranges obtained by the r-th reference station 40 for the i-th positioning satellite 11 corrected using the information on satellite clock errors included in the navigation calendar among the navigation information It is an observation value or a carrier phase observation value.
- PRC r i and CPC r i are a pseudo range correction value and a carrier phase correction value for the i-th positioning satellite 11, respectively.
- the method of calculating the satellite position from the navigation information and the procedure of correcting the satellite clock error follow the procedure described in the specification provided by each positioning satellite 10, 11 or the organization operating each service.
- correction data when using positioning data of a plurality of reference stations 40, individual correction values calculated by the plurality of reference stations 40 may be used as correction data. Furthermore, a surface correction parameter or the like obtained by using a surface correction parameter (FKP: Flachen Korrektur Parameter) method may be added to the correction data.
- FKP Flachen Korrektur Parameter
- the precision satellite clock is a clock based on clock error information that is more accurate than the information on the satellite clock error included in the navigation calendar
- the precision orbit is a satellite that is more accurate than the satellite position calculated from the navigation calendar. It is a trajectory based on position information.
- the pseudo range observation value obtained from the reference station 40 or the carrier phase observation value itself may be used as the correction data.
- the correction data may use, as the correction data, a pseudo distance observation value at a virtual reference point or a carrier phase observation value itself obtained using a virtual reference point (VRS) method.
- VRS virtual reference point
- the quality evaluation unit 114 evaluates the quality of the correction data, and obtains an index value of the quality of the correction data of each positioning satellite 10,11.
- the evaluation index of the pseudo distance correction value and the carrier phase correction value is, for example, the dispersion of the difference between the epochs of the correction value obtained in the past several epochs (for example, 5 minutes) as shown in the following equation, for example.
- val represents the variance of the values contained in U.
- N is the epoch number
- ⁇ t is the epoch time interval.
- PRC is a pseudorange correction amount
- CPC is a carrier phase correction amount
- i is a term applied to the satellite
- r is a term applied to the receiver.
- the root mean square (RMS: difference amount) of the correction values calculated by the individual reference stations 40 at adjacent reference stations 40 for example, a plurality of reference stations within 10 km of distance.
- RMS difference amount
- Dispersion may be used as the evaluation value, or other statistical values may be used.
- i is the number of the positioning satellites 10 and 11
- t is the time
- r1 and r2 indicate the reference stations 1 and 2.
- rms shows the root mean square of the value contained in U.
- the shortest time designation unit 115 uses the shortest selection time t shortest at which the positioning satellites 11 are continuously selected in time in the planner 113. specify.
- the shortest selection time tshort is determined in accordance with the quality evaluation value of the correction data of the positioning satellites 10 and 11 calculated by the quality evaluation unit 114. Specifically, the longer the quality evaluation value, the longer the value.
- the shortest selection time tshort may be changed according to the type (group) of positioning satellites, and may be set to a longer value as the quality evaluation value for each type of positioning satellite is worse. Moreover, you may set to a long value, so that the quality evaluation value of the past of the positioning satellites 10 and 11 is bad.
- the threshold value of the evaluation value of the quality of the pseudo distance correction value may be, for example, 1.5 m, which is three times the random component of the observation error of the general pseudo distance observation value.
- a represents a coefficient
- i represents the i-th positioning satellite 10 or 11.
- r represents the time it takes for the term to be applied to the receiver.
- the evaluation value of the carrier wave phase correction value may be similarly applied.
- the threshold value of the evaluation value of the carrier phase correction value may be, for example, a quarter wavelength of the carrier wave (0.048 [m] for the L1 carrier wave and 0.061 [m] for the L2 carrier wave).
- the plan correction unit 116 corrects the plan between the current time and the correction time t modify according to the quality evaluation value. If the satellite included in the combination plan at the current time includes a satellite whose evaluation value of the correction data output by the quality evaluation unit 114 exceeds the threshold, the satellite is removed from the combination during the correction time t modify from the current time. Then, satellites not included in the combination with other satellites not exceeding the threshold are newly added to the combination. When the evaluation value of the correction data can not be obtained, it is treated as the case where the threshold value is exceeded.
- plan storage unit 117 The operation of the plan storage unit 117 is the same as the operation of the plan storage unit 117 of the positioning device 30 according to the first embodiment of the present invention.
- the correction data output unit 121 acquires the selected combination of the positioning satellites 11 from the plan storage unit 117, and outputs the correction data of the positioning satellite 11 included in the selected combination among the correction data of each satellite acquired from the correction data generation unit 120 Do.
- the correction data output from the correction data output unit 121 is provided to the positioning terminal 60 via a distribution means such as the multifunction positioning satellite 17 or the like.
- FIG. 11 is a block diagram showing a configuration example of the positioning terminal 60 of the positioning system 200 of the second embodiment.
- the positioning terminal 60 includes a terminal positioning data acquisition unit 131, a correction data acquisition unit 122, and a positioning operation unit 118.
- the terminal positioning data acquisition unit 131 receives the ranging signal transmitted by the positioning satellite 11, and acquires the distance observation value for the positioning satellite 11 and the navigation information of the positioning satellite 11.
- the correction data acquisition unit 122 acquires correction data provided from the positioning information transmission device 50 via the multifunction positioning satellite 17.
- the correction data acquisition unit 122 may be configured to acquire correction data provided from the positioning information transmission device 50 by wireless communication, wireless LAN, or the like via the Internet instead of the multi-function positioning satellite 17. It is effective especially in the area which can not communicate with the multifunctional positioning satellite 17.
- the positioning operation unit 118 corrects the distance observation value acquired by the terminal positioning data acquisition unit 131 with the correction data acquired by the correction data acquisition unit 122 for the positioning satellite 11 whose correction data is to be corrected, and corrects it with the correction data.
- the position of the positioning terminal 60 or the positioning target 20 is calculated using the distance observation value.
- the same calculation as that of the positioning operation unit 118 of the positioning device 30 of Embodiment 1 is used.
- FIG. 12 is a diagram showing a hardware configuration of the positioning information transmission device 50 of the present embodiment.
- a data receiving unit 162 receives information from a communication line 161 such as the Internet, a public line, or a dedicated line.
- the arithmetic processing unit 163 performs an operation from the data received by the data receiving unit 162 and the data stored in the storage unit 164.
- the storage unit 164 holds information input in advance, and holds temporary data of processing performed by the arithmetic processing unit 163 and data as a result.
- the information transmission unit 165 transmits information of the calculation result and the like stored in the storage unit 164 to the outside according to an instruction of the calculation processing unit 163.
- the information transmission unit 165 is configured to transmit information to the multifunction positioning satellite 17.
- the information transmission unit 165 may be configured to transmit information via a communication line such as the Internet, a public line, or a dedicated line. Furthermore, both or one of the multi-function positioning satellites 17 and the communication line may be switched and transmitted.
- the positioning data acquisition unit 111 is executed by the communication line 161 and the data reception unit 162.
- the satellite position calculation unit 112, the correction data generation unit 120, the quality evaluation unit 114, the shortest time designation unit 115, the plan making unit 113, and the plan correction unit 116 are executed by the arithmetic processing unit 163.
- Information such as positioning data, correction data, quality evaluation values, and a selected combination list handled by the arithmetic processing unit 163 is stored in the storage unit 164 and read out.
- the plan storage unit 117 stores the combination list and the correction data in the storage unit 164 and reads the combination list and the correction data.
- the correction data output unit 121 transmits information of the combination list and the correction data held in the storage unit 164 to the outside by the information transmission unit 165 according to an instruction of the arithmetic processing unit 163.
- the information transmission unit 165 transmits information via the multi-function positioning satellite 17 and the communication line.
- the processing of the arithmetic processing unit 163 in FIG. 12 reads the program stored in the storage unit 164, and the satellite position calculation unit 112, the correction data generation unit 120, the quality evaluation unit 114, the shortest time designation unit 115, and the planning unit 113, the process of the plan correction unit 116 may be performed. Further, the processing circuit that performs processing of each part may be configured by dedicated hardware and realized by a single circuit, a complex circuit, a programmed processor, a processor programmed in parallel, an ASIC, or an FPGA.
- the storage unit 164 is, for example, a nonvolatile or volatile semiconductor memory such as RAM, ROM, flash memory, EPROM, EEPROM, magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD, etc. Do.
- FIG. 13 is a diagram showing a hardware configuration of positioning terminal 60 of the present embodiment.
- the positioning antenna 151 receives the signals of the positioning satellites 10 and 11.
- the received data demodulation unit 152 amplifies the signal received by the positioning antenna 151, performs frequency conversion and the like, performs AD conversion and digitization, and performs code demodulation and the like.
- the information receiving unit 171 receives information from the outside.
- the information reception unit 171 may be configured to receive information from the multi-function positioning satellite 17. Further, the information reception unit 171 may receive information from the communication line such as the Internet, a public line, or a dedicated line. Furthermore, both of the multi-function positioning satellite 17 and the communication line may be prepared, switched and received.
- the arithmetic processing unit 173 that receives the signal of the reception data demodulation unit 152 and the information of the information reception unit 171 performs various operations in addition to performing operations such as demodulation of navigation information, satellite orbit operation, and position operation.
- the storage unit 174 temporarily stores data when performing an operation, or stores data such as a selected combination list.
- the output unit 175 outputs the result calculated by the calculation processing unit 173 or the data stored in the storage unit 174 to the outside according to an instruction of the calculation processing unit 173. This output is an output to a display device such as a display, and provides information to an external device through an interface as a signal.
- the output also includes an indication of the position on the map.
- the positioning data acquisition unit 131 is executed by the positioning antenna 151 and the reception data demodulation unit 152.
- the final navigation information and the calculation of the distance observation value are performed using the arithmetic processing unit 173.
- the correction data acquisition unit 122 is performed by the information reception unit 171.
- the positioning operation unit 118 is mainly operated by the operation processing unit 173.
- the result of arithmetic processing by the arithmetic processing unit 173, such as positioning data, selected combination information, and positioning operation results, is stored in the storage unit 174.
- the positioning result calculated by the positioning calculation unit 118 is output by the output unit 175 to a display device such as a display and displayed.
- the display also includes the display of the position on the map. It also includes outputting the positioning result to another system.
- the processing of the positioning operation unit 118 may be performed by reading the program recorded in the storage unit 174.
- the processing circuit that performs processing of each part may be configured by dedicated hardware and realized by a single circuit, a complex circuit, a programmed processor, a processor programmed in parallel, an ASIC, or an FPGA.
- the storage unit 174 corresponds to, for example, nonvolatile or volatile semiconductor memory such as RAM, ROM, flash memory, EPROM, EEPROM, magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD, etc. Do.
- the correction data acquisition unit 122 acquires the data transmitted from the positioning information transmission device 50 in the above, it may be configured to acquire other data as well.
- another selection combination for each time of the positioning satellites 11 obtained using the accuracy degradation index obtained from the geometrical arrangement as an evaluation criterion is not based on the condition that selection is made longer than the shortest selection time of the positioning satellites 10 and 11
- the multi-function positioning satellites 17 are configured to receive via the communication line in the same manner as described above.
- the correction data acquisition unit 122 does not use the positioning satellite 11 of the selected combination transmitted from the positioning information transmission device 50 and the correction data of the positioning satellite or the condition that the selection is made longer than the shortest selection time in another system. It is also possible to switch between another selected combination of positioning satellites obtained using the accuracy degradation index obtained from the geometrical arrangement as an evaluation criterion and using correction data of the positioning satellites.
- the correction data acquisition unit 122 can not receive the signal transmitted from the positioning information transmission device 50, or is not transmitted from the positioning information transmission device 50, and the target of the positioning satellite of the selected combination the current time has already acquired. When the time passes, it is possible to switch so as to use the positioning satellite of the other selected combination described above and the correction data of this other positioning satellite. It is effective when the signal transmitted from the positioning information transmitter 50 can not be transmitted for some reason.
- a terminal quality evaluation unit 132 for obtaining a quality evaluation value for evaluating the quality of positioning data of the terminal positioning data acquisition unit 131 is provided, and the correction data acquisition unit 122 measures the positions of all other positioning satellites of the other selected combination described above. If the quality evaluation value of the data is better than the threshold value, it may be configured to switch to use the positioning satellite of the other selected combination described above and the correction data of this positioning satellite. Conversely, if the quality evaluation value of the positioning data of another positioning satellite of another selection combination as described above is worse than a threshold, the correction data acquisition unit 122 performs positioning of the selection combination transmitted from the positioning information transmission device 50 You may comprise so that the correction data of the satellite 11 and this positioning satellite may be used.
- the selection duration time of the positioning satellite 11 once selected as the target of correction is It becomes longer than the shortest selection time according to the quality of satellite correction data, and stable positioning can be performed by the positioning terminal 60. This is particularly effective when the number of satellites that can be subjected to error correction is limited according to the channel capacity.
- the time required to determine the carrier phase ambiguity can be secured according to the quality of the satellite positioning data, and a stable centimeter Level positioning can be performed.
- positioning satellites 10 positioning satellites, 11 selective positioning satellites, 17 multifunctional positioning satellites, 20 positioning targets, 30 positioning devices, 31 positioning satellite selecting devices, 40 reference stations, 50 positioning information transmitting devices, 60 terminal side positioning devices, 111 positioning data acquisition unit, 112 satellite position calculation unit, 113 planning unit, 114 quality evaluation unit, 115 shortest time specifying unit, 116 plan correction unit, 117 plan storage unit, 118 positioning operation unit, 120 correction data generation unit, 121 correction data output unit, 122 Correction data acquisition unit, 131 terminal positioning data acquisition unit, 200 Positioning system.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Security & Cryptography (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Description
従来の測位システムは、時刻毎の独立した評価に基づいて各時刻での衛星の組み合わせを決定する。このため、評価の対象となる測位衛星の数に対して選択される衛星数が少ない場合には、組み合わせの時間的な変化が顕著になり、端末側の測位フィルタで個々の衛星を継続して利用できない。特に、搬送波位相観測量を用いたリアルタイムキネマティック測位(RTK:Real Time Kinematic)や精密単独測位(PPP:Precise Point Positioning)では、観測誤差の大きさに対して個々の衛星信号の継続利用時間が短い場合には、誤差のランダム成分のため搬送波位相アンビギュイティ(波長の整数倍の不定性)が決定できず、高精度な搬送波位相観測量を活かしたセンチメータ級測位を行うことができない。






図において、測位用アンテナ151は、測位衛星10、11の信号を受ける。受信データ復調部152は、測位用アンテナ151で受けた信号を増幅、周波数変換などを行いAD変換してデジタル化し、コード復調等を行う。受信データ復調部152の信号を受けた演算処理部153は、航法情報の復調、衛星軌道演算、位置演算などの演算を行う。記憶部154は、演算を行う際の一時的なデータの保存、または選択組合せリストなどデータ保存を行う。出力部155は、演算処理部153で演算した結果、または記憶部154に保存されたデータを演算処理部153の指示によって、外部に出力する。この出力は、ディスプレイなどの表示装置への出力、信号としてインタフェースを介して外部機器へ情報を提供する。出力には、地図上への位置の表示も含まれる。
(1)測位衛星pを割当てた時刻tより時間間隔1単位前の時刻(t+dt-1)(単位は、選択組組合せを決める時間間隔を1とする単位)が、開始時刻より後であること
(2)時刻(t+dt-1)で測位衛星pが可視であること
(3)時刻tと時刻(t+dt-1)との差分dt-1が、最短選択時間tshortestの半分以下であること
(4)時刻(t+dt-1)に、既に割り当てられた測位衛星数が、同時に選択する測位衛星数の上限未満であることのすべての条件を満たすか否かを判断する。
(5)測位衛星を割り当てた時刻より1つ後ろの時刻(t+dt+1)が終了時刻より前であること
(6)時刻(t+dt+1)で、測位衛星pが可視であること
(7)時刻(t+dt+1)で、既に割り当てられた測位衛星数が、同時に選択する測位衛星数の上限未満であることのすべての条件を満たすか否かを判断する。
(8)1つ前の時刻(t+dt-1)が開始時刻より後であること
(9)時刻(t+dt-1)で、測位衛星pが可視であること
(10)時刻(t+dt-1)と割り当てた最も後ろの時刻tendとの差が、最短選択時間tshortest以下であること
(11)時刻(t+dt-1)既に割り当てられた測位衛星数が、同時に選択する測位衛星数の上限未満であることのすべての条件を満たすか否かを判断する。
(1)選択衛星の割当てを求める開始時刻tstartから終了時刻tendまでの間に、選択された衛星数が上限未満の時刻があること
(2)上記(1)で選択された衛星の数が上限未満の時刻のうち、未選択の可視の衛星があること
の条件を満たす場合には、ステップS25へ処理を移す。ステップS24は、上記条件(1)(2)満たさない場合には、ステップS26へ処理を移す。
(1)選択衛星の割当てを求める現時刻から修正時間tmodifyまでの間に、選択された衛星数が上限未満の時刻があること
(2)上記(1)で選択された衛星の数が上限未満の時刻のうち、未選択の可視の衛星があること
の条件を満たす場合(ステップS44;YES)には、ステップS45へ処理を移す。ステップS44は、上記条件(1)(2)満たさない場合には、ステップS46へ処理を移す。
上記実施の形態1は、測位装置30が、測位衛星11の選択組合せを求めて、測位対象20の位置を測位する。これに対して、本実施の形態2は、測位衛星からの測位データを受信して受信情報を発信する正確な位置が判明している基準局からの情報を用いて、測位対象の位置を安定して測位する測位システムについて述べる。
測位データ取得部111は、基準局40から、各測位衛星10,11の測位データを取得する。測位データの取得には、インターネット等の回線を使用すれば良い。取得する測位データは、本実施の形態1と同様に、各測位衛星10,11に対する距離観測値と測位衛星10,11の航法情報である。ただし、測位データは、広いエリアで補正データを有効とするため、複数の基準局40から取得しても良い。例えば、日本であれば、基準局40は、全国約1300点存在するから、これらの基準局から取得しても良い。


Claims (15)
- 複数の測位衛星から発信される信号から測位対象の位置での測位に用いる時刻ごとの前記測位衛星の選択組合せを求める測位衛星選択装置において、
複数の前記測位衛星の航法情報および距離観測値を含む測位データを取得する測位データ取得部と、
前記測位データの前記航法情報から前記測位衛星の時刻ごとの衛星位置を算出する衛星位置算出部と、
前記測位データの品質を評価した品質評価値を求める品質評価部と、
前記測位衛星を選択する最短時間である最短選択時間を前記品質評価値が悪いほど長い値に設定する最短時間指定部と、
複数の前記測位衛星の前記衛星位置から算出される天空上の時刻ごとの幾何学的配置から求めた精度劣化指数を評価基準に、前記最短選択時間より長く選択することを条件として時刻ごとの前記選択組合せを求める計画立案部と、
前記測位衛星の時刻ごとの前記選択組合せの計画を保存する計画保存部とを備えた測位衛星選択装置。 - 前記計画立案部で計画された前記選択組合せに対して、現在時刻における前記品質評価値に基づき前記選択組合せの測位衛星を変更し、前記最短選択時間より長く選択することを条件として、測位で使用する前記測位衛星の時刻ごとの選択組合せを修正する計画修正部を備えたことを特徴とする請求項1に記載の測位衛星選択装置。
- 複数の測位衛星の航法情報および距離観測値を含む測位データを取得する測位データ取得部と、
前記測位データの前記航法情報から前記測位衛星の時刻ごとの衛星位置を算出する衛星位置算出部と、
前記測位データの品質を評価した品質評価値を求める品質評価部と、
前記測位衛星を選択する最短時間である最短選択時間を前記品質評価値が悪いほど長い値に設定する最短時間指定部と、
複数の前記測位衛星の前記衛星位置から算出される天空上の時刻ごとの幾何学的配置から求めた精度劣化指数を評価基準に、前記測位衛星の前記最短選択時間より長く選択することを条件として、測位で使用する前記測位衛星の時刻ごとの選択組合せを計画する計画立案部と、
前記測位衛星の時刻ごとの前記選択組合せの計画を保存する計画保存部と、
前記計画保存部から前記測位衛星の時刻ごとの前記選択組合せの計画を取得し、前記選択組合せに含まれる前記測位衛星の測位データを用いて位置の計測演算を行う測位演算部とを備える測位装置。 - 前記計画立案部で計画された前記選択組合せに対して、現在時刻における前記品質評価値に基づき前記選択組合せの測位衛星を変更し、前記最短選択時間より長く選択することを条件として、測位で使用する前記測位衛星の時刻ごとの選択組合せを修正する計画修正部を備えたことを特徴とする請求項3に記載の測位装置。
- 前記品質評価部は、前記測位衛星の観測値を用いて測位を行ったときの観測残差を用いて前記品質評価値を求め、
前記最短時間指定部は、全衛星の観測残差の統計値に比例係数を掛けた値を前記最短選択時間とすることを特徴とする請求項3に記載の測位装置。 - 前記品質評価部は、前記測位衛星の測距精度情報を用いて前記品質評価値を求め、
前記最短時間指定部は、全ての前記測位衛星の測距精度の統計値に比例係数を掛けた値を前記最短選択時間とすることを特徴とする請求項3に記載の測位装置。 - 前記品質評価部は、前記測位衛星の誤差補正値の1エポック間の差分の標準偏差を用いて前記品質評価値を求め、
前記最短時間指定部は、全ての前記測位衛星の前記標準偏差の統計値に比例係数を掛けた値を前記最短選択時間とすることを特徴とする請求項3に記載の測位装置。 - 前記計画立案部は、エポックのループとは独立のスレッド処理として実行され、既存の前記計画の計画終了時刻に対して所定時間前に処理を開始することを特徴とする請求項3に記載の測位装置。
- 測位情報発信装置と測位端末とを備えた測位システムにおいて、
複数の測位衛星から前記測位衛星の航法情報および距離観測値を含む測位データを取得する基準局から前記測位データを取得する測位データ取得部と、
前記測位データに含まれる航法情報から前記測位衛星の時刻ごとの衛星位置を算出する衛星位置算出部と、
前記測位衛星の前記測位データに含まれる誤差を補正する補正データを生成する補正データ生成部と、
前記補正データの品質を評価した品質評価値を求める品質評価部と、
前記測位衛星を選択する最短時間である最短選択時間を前記品質評価値が悪いほど長い値に設定する最短時間指定部と、
複数の前記測位衛星の前記衛星位置から算出される天空上の時刻ごとの幾何学的配置から求めた精度劣化指数を評価基準に、前記測位衛星の前記最短選択時間より長く選択することを条件として、測位で使用する前記測位衛星の時刻ごとの選択組合せを計画する計画立案部と、
前記測位衛星の時刻ごとの前記選択組合せを保存する計画保存部と、
時刻ごとの前記選択組合せに含まれる前記測位衛星およびこの測位衛星の前記補正データを出力する補正データ出力部とを有する測位情報発信装置、および
前記測位端末にて前記測位衛星の距離観測値および航法情報を取得する端末測位データ取得部と、
前記測位情報発信装置から前記測位衛星の前記補正データを取得する補正データ取得部と、
前記測位衛星の補正データで補正した距離観測値を用いて位置を算出する測位演算部とを有する測位端末を備えた測位システム。 - 前記補正データ出力部は、多機能測位衛星を介してデータを出力し、
前記補正データ取得部は、前記多機能測位衛星を介してデータを取得することを特徴とする請求項9に記載の測位システム。 - 複数の測位衛星から前記測位衛星の航法情報および距離観測値を含む測位データを取得する基準局から前記測位データを取得する測位データ取得部と、
前記測位データに含まれる航法情報から前記測位衛星の時刻ごとの衛星位置を算出する衛星位置算出部と、
前記測位衛星の前記測位データに含まれる誤差を補正する補正データを生成する補正データ生成部と、
前記補正データの品質を評価した品質評価値を求める品質評価部と、
前記測位衛星を選択する最短時間である最短選択時間を前記品質評価値が悪いほど長い値に設定する最短時間指定部と、
複数の前記測位衛星の前記衛星位置から算出される天空上の時刻ごとの幾何学的配置から求めた精度劣化指数を評価基準に、前記測位衛星の前記最短選択時間より長く選択することを条件として、測位で使用する前記測位衛星の時刻ごとの選択組合せを計画する計画立案部と、
前記測位衛星の時刻ごとの前記選択組合せを保存する計画保存部と、
時刻ごとの前記選択組合せに含まれる前記測位衛星およびこの測位衛星の前記補正データを出力する補正データ出力部とを備えた測位情報発信装置。 - 前記品質評価部は、前記測位衛星の観測値を用いて測位を行ったときの観測残差を用いて前記品質評価値を求め、
前記最短時間指定部は、全衛星の観測残差の統計値に比例係数を掛けた値を前記最短選択時間とすることを特徴とする請求項11に記載の測位情報発信装置。 - 前記品質評価部は、前記測位衛星の測距精度情報を用いて前記品質評価値を求め、
前記最短時間指定部は、全ての前記測位衛星の測距精度の統計値に比例係数を掛けた値を前記最短選択時間とすることを特徴とする請求項11に記載の測位情報発信装置。 - 前記品質評価部は、前記測位衛星の誤差補正値の1エポック間の差分の標準偏差を用いて前記品質評価値を求め、
前記最短時間指定部は、全ての前記測位衛星の前記標準偏差の統計値に比例係数を掛けた値を前記最短選択時間とすることを特徴とする請求項11に記載の測位情報発信装置。 - 請求項11から14のいずれか1項に記載の測位情報発信装置から発信される時刻ごとの前記選択組合せに含まれる前記測位衛星およびこの測位衛星の前記補正データを取得する補正データ取得部と、
前記測位衛星の前記距離観測値を含む測位データを取得する端末測位データ取得部と、
前記補正データ取得部で取得した前記測位衛星の補正データで前記測位衛星の前記距離観測値を補正した前記距離観測値を用いて位置を算出する測位演算部とを備えた測位端末。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/758,102 US11237275B2 (en) | 2015-09-17 | 2015-09-17 | Positioning satellite selection device, positioning information transmitting device, and positioning system |
| EP15904103.7A EP3351969B1 (en) | 2015-09-17 | 2015-09-17 | Positioning satellite selection device |
| PCT/JP2015/076469 WO2017046914A1 (ja) | 2015-09-17 | 2015-09-17 | 測位衛星選択装置、測位装置、測位システム、測位情報発信装置および測位端末 |
| AU2015409237A AU2015409237B2 (en) | 2015-09-17 | 2015-09-17 | Positioning satellite selection device, positioning information transmitting device, and positioning system |
| JP2017540412A JP6545273B2 (ja) | 2015-09-17 | 2015-09-17 | 測位衛星選択装置、測位情報発信装置および測位システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/076469 WO2017046914A1 (ja) | 2015-09-17 | 2015-09-17 | 測位衛星選択装置、測位装置、測位システム、測位情報発信装置および測位端末 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017046914A1 true WO2017046914A1 (ja) | 2017-03-23 |
Family
ID=58288349
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/076469 Ceased WO2017046914A1 (ja) | 2015-09-17 | 2015-09-17 | 測位衛星選択装置、測位装置、測位システム、測位情報発信装置および測位端末 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11237275B2 (ja) |
| EP (1) | EP3351969B1 (ja) |
| JP (1) | JP6545273B2 (ja) |
| AU (1) | AU2015409237B2 (ja) |
| WO (1) | WO2017046914A1 (ja) |
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018181017A1 (ja) * | 2017-03-27 | 2018-10-04 | 日本電気株式会社 | 地上型衛星航法補強システム及びジオメトリスクリーニング方法 |
| CN108885269A (zh) * | 2016-04-07 | 2018-11-23 | 大众汽车有限公司 | 导航方法、导航装置和导航系统 |
| JP2018205244A (ja) * | 2017-06-08 | 2018-12-27 | 株式会社デンソー | 測位装置 |
| JP2021135056A (ja) * | 2020-02-21 | 2021-09-13 | 東京計器株式会社 | 測位処理装置、測位処理プログラム |
| JP2022068867A (ja) * | 2020-10-22 | 2022-05-10 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | Gnssセンサデータの提供方法 |
| WO2022107254A1 (ja) * | 2020-11-18 | 2022-05-27 | 日本電信電話株式会社 | 衛星信号受信装置、衛星信号処理方法、及びプログラム |
| JP2022530983A (ja) * | 2019-05-01 | 2022-07-05 | スウィフト ナヴィゲーション,インコーポレイテッド | 高完全性衛星測位のためのシステムおよび方法 |
| CN114841297A (zh) * | 2022-07-05 | 2022-08-02 | 成都戎星科技有限公司 | 一种基于dto分离的多星无源定位散点目标分类方法 |
| US11550067B2 (en) | 2020-12-17 | 2023-01-10 | Swift Navigation, Inc. | System and method for fusing dead reckoning and GNSS data streams |
| JP2023042741A (ja) * | 2021-09-15 | 2023-03-28 | 三菱重工業株式会社 | 目標追跡装置及び目標追跡プログラム |
| US11624838B2 (en) | 2020-07-17 | 2023-04-11 | Swift Navigation, Inc. | System and method for providing GNSS corrections |
| US11624843B2 (en) | 2017-12-14 | 2023-04-11 | Swift Navigation, Inc. | Systems and methods for reduced-outlier satellite positioning |
| JP2023527897A (ja) * | 2020-06-04 | 2023-06-30 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 位置特定のための衛星組合せを選択する方法 |
| US11693120B2 (en) | 2021-08-09 | 2023-07-04 | Swift Navigation, Inc. | System and method for providing GNSS corrections |
| US11714196B2 (en) | 2017-11-17 | 2023-08-01 | Swift Navigation, Inc. | Systems and methods for distributed dense network processing of satellite positioning data |
| US11733397B2 (en) | 2021-07-24 | 2023-08-22 | Swift Navigation, Inc. | System and method for computing positioning protection levels |
| US11860287B2 (en) | 2022-03-01 | 2024-01-02 | Swift Navigation, Inc. | System and method for detecting outliers in GNSS observations |
| US11867823B2 (en) | 2020-07-13 | 2024-01-09 | Swift Navigation, Inc. | System and method for determining GNSS positioning corrections |
| US11906640B2 (en) | 2022-03-01 | 2024-02-20 | Swift Navigation, Inc. | System and method for fusing sensor and satellite measurements for positioning determination |
| US12013468B2 (en) | 2022-09-01 | 2024-06-18 | Swift Navigation, Inc. | System and method for determining GNSS corrections |
| US12019163B2 (en) | 2022-09-12 | 2024-06-25 | Swift Navigation, Inc. | System and method for GNSS correction transmission |
| US12055644B2 (en) | 2020-02-14 | 2024-08-06 | Swift Navigation, Inc | System and method for reconverging GNSS position estimates |
| US12216211B2 (en) | 2021-12-10 | 2025-02-04 | Swift Navigation, Inc. | System and method for correcting satellite observations |
| JP7743571B1 (ja) | 2024-06-20 | 2025-09-24 | Ntt東日本株式会社 | 測定装置、測定方法、及び、測定プログラム |
| US12498493B2 (en) | 2022-10-21 | 2025-12-16 | Swift Navigation, Inc. | System and method for distributed integrity monitoring |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017154131A1 (ja) * | 2016-03-09 | 2017-09-14 | 三菱電機株式会社 | 測位装置および測位方法 |
| GB2548367A (en) * | 2016-03-15 | 2017-09-20 | Here Global Bv | Supporting an estimation of satellite locations |
| US11592578B2 (en) * | 2016-12-30 | 2023-02-28 | U-Blox Ag | GNSS receiver protection levels |
| JP6743777B2 (ja) * | 2017-07-07 | 2020-08-19 | 株式会社デンソー | 測位装置 |
| JP6733619B2 (ja) * | 2017-07-07 | 2020-08-05 | 株式会社デンソー | 測位装置 |
| US10641903B2 (en) * | 2017-09-29 | 2020-05-05 | Bnsf Railway Company | Optimized global positioning system correction message for interoperable train control messaging transport |
| KR102316770B1 (ko) * | 2019-11-11 | 2021-10-27 | 한국철도기술연구원 | 철도 선로상 차량의 위치 검지 장치 및 방법 |
| CN111211779B (zh) * | 2019-12-31 | 2023-01-06 | 苏州浪潮智能科技有限公司 | 一种基于fpga的间隔均分设计方法和装置 |
| CN111381251B (zh) * | 2020-03-18 | 2022-04-05 | 杭州微萤科技有限公司 | 一种定位系统的同步链自优化方法及定位系统 |
| CN115603792A (zh) * | 2020-04-10 | 2023-01-13 | 华为技术有限公司(Cn) | 一种通信方法和装置 |
| CN112887908B (zh) * | 2021-03-12 | 2023-02-07 | 真点科技(北京)有限公司 | 一种处理定位信息的方法、装置、计算机存储介质及终端 |
| CN116346258A (zh) * | 2021-12-22 | 2023-06-27 | 华为技术有限公司 | 通信方法及通信装置 |
| CN114384569B (zh) * | 2022-01-12 | 2025-04-18 | 腾讯科技(深圳)有限公司 | 终端定位方法、装置、设备以及介质 |
| CN114543842B (zh) * | 2022-02-28 | 2023-07-28 | 重庆长安汽车股份有限公司 | 一种多传感器融合定位系统的定位精度评价系统及方法 |
| KR102802199B1 (ko) * | 2022-10-21 | 2025-05-02 | 한국철도기술연구원 | Gdop를 이용한 위성 선택 방법 및 장치 |
| CN115993623B (zh) * | 2023-03-24 | 2023-06-02 | 武汉大学 | 一种自适应选星方法、装置、设备及可读存储介质 |
| CN116626728A (zh) * | 2023-05-24 | 2023-08-22 | 华南师范大学 | 一种多频分量gnss高精度高航定位的方法 |
| CN116720050B (zh) * | 2023-06-12 | 2026-01-23 | 东南大学 | 一种地面伪卫星增强系统的信号质量评估方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01320485A (ja) * | 1988-06-22 | 1989-12-26 | Hitachi Ltd | Gps測位装置の受信方法 |
| JP2006504097A (ja) * | 2002-10-22 | 2006-02-02 | クゥアルコム・インコーポレイテッド | 複数の順次高感度になる探索モードを用いて位置決定信号を探索するための方法 |
| JP2009276198A (ja) * | 2008-05-14 | 2009-11-26 | Panasonic Corp | 通信端末装置及び受信方法 |
| JP2014153087A (ja) * | 2013-02-05 | 2014-08-25 | Mitsubishi Electric Corp | Gnss測位装置およびgnss測位方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10253740A (ja) | 1997-03-14 | 1998-09-25 | Japan Aviation Electron Ind Ltd | Gps受信機に用いる衛星の組合せ決定方法及びこの方法を用いた衛星の組合せ決定装置 |
| US6650288B1 (en) * | 2002-05-23 | 2003-11-18 | Telecommunication Systems | Culled satellite ephemeris information for quick assisted GPS location determination |
| JP3651678B2 (ja) | 2002-08-13 | 2005-05-25 | キーウェアソリューションズ株式会社 | Gpsによる自律測位方法、自律航法装置及びコンピュータプログラム |
| FI20031417A0 (fi) * | 2003-09-30 | 2003-09-30 | Nokia Corp | Sijainninavustustiedon välittäminen matkaviestimeen |
| JP4228904B2 (ja) | 2003-12-18 | 2009-02-25 | セイコーエプソン株式会社 | 衛星選択方法、移動端末、情報サーバおよび情報送信システム |
| JP4234039B2 (ja) * | 2004-03-05 | 2009-03-04 | アルパイン株式会社 | 衛星測位装置及びナビゲーション装置 |
| JP2006126181A (ja) | 2004-10-01 | 2006-05-18 | Mitsubishi Electric Corp | 移動体姿勢検出装置 |
| JP2006240593A (ja) | 2005-03-07 | 2006-09-14 | Nippon Signal Co Ltd:The | 列車初期位置決定装置及び列車初期位置決定方法 |
| US7839332B2 (en) * | 2006-03-28 | 2010-11-23 | Mediatek Inc. | Satellite search method and receiver using the same |
| JP2010054469A (ja) | 2008-08-29 | 2010-03-11 | Pioneer Electronic Corp | 現在位置検出装置、現在位置検出方法及び現在位置検出用プログラム |
| JP2010151725A (ja) | 2008-12-26 | 2010-07-08 | Toyota Motor Corp | Gnss受信装置及び測位方法 |
| JP2010163118A (ja) | 2009-01-19 | 2010-07-29 | Toshiba Corp | 列車位置検知システム |
| CN102401902A (zh) * | 2010-09-08 | 2012-04-04 | 神讯电脑(昆山)有限公司 | 卫星状态判断方法 |
| JP5678589B2 (ja) | 2010-11-08 | 2015-03-04 | セイコーエプソン株式会社 | 衛星捕捉方法及び衛星捕捉装置 |
| US9244172B2 (en) * | 2012-06-20 | 2016-01-26 | Topcon Positioning Systems, Inc. | Selection of a subset of global navigation satellite system measurements based on prediction of accuracy of target parameters |
| JP2014219204A (ja) | 2013-05-01 | 2014-11-20 | 三菱電機株式会社 | 移動体情報端末 |
| US9766346B2 (en) * | 2013-10-27 | 2017-09-19 | Honeywell International Inc. | Multiple-criterion based global navigation satellite sub-set recursive selection |
-
2015
- 2015-09-17 WO PCT/JP2015/076469 patent/WO2017046914A1/ja not_active Ceased
- 2015-09-17 JP JP2017540412A patent/JP6545273B2/ja active Active
- 2015-09-17 US US15/758,102 patent/US11237275B2/en active Active
- 2015-09-17 AU AU2015409237A patent/AU2015409237B2/en not_active Ceased
- 2015-09-17 EP EP15904103.7A patent/EP3351969B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01320485A (ja) * | 1988-06-22 | 1989-12-26 | Hitachi Ltd | Gps測位装置の受信方法 |
| JP2006504097A (ja) * | 2002-10-22 | 2006-02-02 | クゥアルコム・インコーポレイテッド | 複数の順次高感度になる探索モードを用いて位置決定信号を探索するための方法 |
| JP2009276198A (ja) * | 2008-05-14 | 2009-11-26 | Panasonic Corp | 通信端末装置及び受信方法 |
| JP2014153087A (ja) * | 2013-02-05 | 2014-08-25 | Mitsubishi Electric Corp | Gnss測位装置およびgnss測位方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3351969A4 * |
Cited By (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108885269A (zh) * | 2016-04-07 | 2018-11-23 | 大众汽车有限公司 | 导航方法、导航装置和导航系统 |
| CN108885269B (zh) * | 2016-04-07 | 2022-11-11 | 大众汽车有限公司 | 导航方法、导航装置和导航系统 |
| JPWO2018181017A1 (ja) * | 2017-03-27 | 2019-12-26 | 日本電気株式会社 | 地上型衛星航法補強システム及びジオメトリスクリーニング方法 |
| WO2018181017A1 (ja) * | 2017-03-27 | 2018-10-04 | 日本電気株式会社 | 地上型衛星航法補強システム及びジオメトリスクリーニング方法 |
| JP2018205244A (ja) * | 2017-06-08 | 2018-12-27 | 株式会社デンソー | 測位装置 |
| US12164041B2 (en) | 2017-11-17 | 2024-12-10 | Swift Navigation, Inc. | Systems and methods for distributed dense network processing of satellite positioning data |
| US11714196B2 (en) | 2017-11-17 | 2023-08-01 | Swift Navigation, Inc. | Systems and methods for distributed dense network processing of satellite positioning data |
| US11624843B2 (en) | 2017-12-14 | 2023-04-11 | Swift Navigation, Inc. | Systems and methods for reduced-outlier satellite positioning |
| US12366666B2 (en) | 2017-12-14 | 2025-07-22 | Swift Navigation, Inc. | Systems and methods for reduced-outlier satellite positioning |
| US12105211B2 (en) | 2019-05-01 | 2024-10-01 | Swift Navigation, Inc. | Systems and methods for high-integrity satellite positioning |
| JP2022530983A (ja) * | 2019-05-01 | 2022-07-05 | スウィフト ナヴィゲーション,インコーポレイテッド | 高完全性衛星測位のためのシステムおよび方法 |
| US11860260B2 (en) | 2019-05-01 | 2024-01-02 | Swift Navigation, Inc. | Systems and methods for high-integrity satellite positioning |
| JP7267460B2 (ja) | 2019-05-01 | 2023-05-01 | スウィフト ナヴィゲーション,インコーポレイテッド | 高完全性衛星測位のためのシステムおよび方法 |
| US11543541B2 (en) | 2019-05-01 | 2023-01-03 | Swift Navigation, Inc. | Systems and methods for high-integrity satellite positioning |
| US12055644B2 (en) | 2020-02-14 | 2024-08-06 | Swift Navigation, Inc | System and method for reconverging GNSS position estimates |
| JP2021135056A (ja) * | 2020-02-21 | 2021-09-13 | 東京計器株式会社 | 測位処理装置、測位処理プログラム |
| JP7581383B2 (ja) | 2020-06-04 | 2024-11-12 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 位置特定のための衛星組合せを選択する方法 |
| JP2023527897A (ja) * | 2020-06-04 | 2023-06-30 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 位置特定のための衛星組合せを選択する方法 |
| US12578482B2 (en) | 2020-07-13 | 2026-03-17 | Swift Navigation, Inc. | System and method for determining GNSS positioning corrections |
| US11867823B2 (en) | 2020-07-13 | 2024-01-09 | Swift Navigation, Inc. | System and method for determining GNSS positioning corrections |
| US11624838B2 (en) | 2020-07-17 | 2023-04-11 | Swift Navigation, Inc. | System and method for providing GNSS corrections |
| JP2022068867A (ja) * | 2020-10-22 | 2022-05-10 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | Gnssセンサデータの提供方法 |
| WO2022107361A1 (ja) * | 2020-11-18 | 2022-05-27 | 日本電信電話株式会社 | 衛星信号受信装置、衛星信号処理方法、及びプログラム |
| JP7626263B2 (ja) | 2020-11-18 | 2025-02-04 | 日本電信電話株式会社 | 衛星信号受信装置、及びプログラム |
| WO2022107453A1 (ja) * | 2020-11-18 | 2022-05-27 | 日本電信電話株式会社 | 衛星信号受信装置、衛星信号処理方法、及びプログラム |
| JPWO2022107453A1 (ja) * | 2020-11-18 | 2022-05-27 | ||
| WO2022107254A1 (ja) * | 2020-11-18 | 2022-05-27 | 日本電信電話株式会社 | 衛星信号受信装置、衛星信号処理方法、及びプログラム |
| JP2024042077A (ja) * | 2020-11-18 | 2024-03-27 | 日本電信電話株式会社 | 衛星信号受信装置、及びプログラム |
| JP7485081B2 (ja) | 2020-11-18 | 2024-05-16 | 日本電信電話株式会社 | 衛星信号受信装置、衛星信号処理方法、及びプログラム |
| US11662478B2 (en) | 2020-12-17 | 2023-05-30 | Swift Navigation, Inc. | System and method for fusing dead reckoning and GNSS data streams |
| US11550067B2 (en) | 2020-12-17 | 2023-01-10 | Swift Navigation, Inc. | System and method for fusing dead reckoning and GNSS data streams |
| US12013472B2 (en) | 2020-12-17 | 2024-06-18 | Swift Navigation, Inc. | System and method for fusing dead reckoning and GNSS data streams |
| US11733397B2 (en) | 2021-07-24 | 2023-08-22 | Swift Navigation, Inc. | System and method for computing positioning protection levels |
| US12085654B2 (en) | 2021-07-24 | 2024-09-10 | Swift Navigation, Inc. | System and method for computing positioning protection levels |
| US11693120B2 (en) | 2021-08-09 | 2023-07-04 | Swift Navigation, Inc. | System and method for providing GNSS corrections |
| JP7830058B2 (ja) | 2021-09-15 | 2026-03-16 | 三菱重工業株式会社 | 目標追跡装置及び目標追跡プログラム |
| US12339379B2 (en) | 2021-09-15 | 2025-06-24 | Mitsubishi Heavy Industries, Ltd. | Target tracking device and storage medium storing target tracking program |
| JP2023042741A (ja) * | 2021-09-15 | 2023-03-28 | 三菱重工業株式会社 | 目標追跡装置及び目標追跡プログラム |
| US12216211B2 (en) | 2021-12-10 | 2025-02-04 | Swift Navigation, Inc. | System and method for correcting satellite observations |
| US11860287B2 (en) | 2022-03-01 | 2024-01-02 | Swift Navigation, Inc. | System and method for detecting outliers in GNSS observations |
| US11906640B2 (en) | 2022-03-01 | 2024-02-20 | Swift Navigation, Inc. | System and method for fusing sensor and satellite measurements for positioning determination |
| CN114841297B (zh) * | 2022-07-05 | 2022-09-06 | 成都戎星科技有限公司 | 一种基于dto分离的多星无源定位散点目标分类方法 |
| CN114841297A (zh) * | 2022-07-05 | 2022-08-02 | 成都戎星科技有限公司 | 一种基于dto分离的多星无源定位散点目标分类方法 |
| US12013468B2 (en) | 2022-09-01 | 2024-06-18 | Swift Navigation, Inc. | System and method for determining GNSS corrections |
| US12019163B2 (en) | 2022-09-12 | 2024-06-25 | Swift Navigation, Inc. | System and method for GNSS correction transmission |
| US12442929B2 (en) | 2022-09-12 | 2025-10-14 | Swift Navigation, Inc. | System and method for GNSS correction transmission |
| US12498493B2 (en) | 2022-10-21 | 2025-12-16 | Swift Navigation, Inc. | System and method for distributed integrity monitoring |
| JP7743571B1 (ja) | 2024-06-20 | 2025-09-24 | Ntt東日本株式会社 | 測定装置、測定方法、及び、測定プログラム |
| JP2026002064A (ja) * | 2024-06-20 | 2026-01-08 | Ntt東日本株式会社 | 測定装置、測定方法、及び、測定プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6545273B2 (ja) | 2019-07-17 |
| JPWO2017046914A1 (ja) | 2018-01-11 |
| US11237275B2 (en) | 2022-02-01 |
| AU2015409237B2 (en) | 2019-07-18 |
| EP3351969B1 (en) | 2022-05-11 |
| US20180252818A1 (en) | 2018-09-06 |
| EP3351969A4 (en) | 2019-05-01 |
| EP3351969A1 (en) | 2018-07-25 |
| AU2015409237A1 (en) | 2018-03-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6545273B2 (ja) | 測位衛星選択装置、測位情報発信装置および測位システム | |
| US10690775B2 (en) | Crowdsourcing atmospheric correction data | |
| CN105849589B (zh) | 全球导航卫星系统、定位终端、定位方法以及记录介质 | |
| Odijk et al. | Differential positioning | |
| RU2565386C2 (ru) | Способ, устройство и система для определения позиции объекта, имеющего приемник глобальной навигационной спутниковой системы, посредством обработки неразностных данных, подобных измерениям фазы несущей, и внешних данных, подобных ионосферным данным | |
| Wiśniewski et al. | Evaluation of RTKLIB's Positioning Accuracy Using low-cost GNSS Receiver and ASG-EUPOS | |
| JP2017173327A (ja) | 衛星測位システムを用いた測位方法および測位装置 | |
| US9389317B2 (en) | Method and apparatus for determining position in a global navigation satellite system | |
| JP2010522874A (ja) | 無線ナビゲーション信号を処理する方法 | |
| JP4644792B2 (ja) | 衛星航法システムにおける電離層遅延量の補正方法及びその装置。 | |
| JP2014206502A (ja) | 衛星測位システム、測位端末、および測位方法 | |
| KR20160009277A (ko) | 이동 측위 장치 및 그 위치 측정 방법 | |
| TW202246803A (zh) | 超寬巷即時動態定位 | |
| JP7591242B1 (ja) | 衛星航法システムにおける測位誤差の補正方法,測位誤差を補正する情報処理装置及びプログラム | |
| JP2018204953A (ja) | 測位用受信機、方法、記録媒体及びコンピュータプログラム | |
| JP2005049147A (ja) | 測位方法及び測位情報提供装置 | |
| US12618983B2 (en) | Methods and systems for excess path length corrections for GNSS receivers | |
| Innac et al. | Multi-GNSS single frequency precise point positioning | |
| US20230393287A1 (en) | Methods and systems for excess path length corrections for gnss receivers | |
| Konin et al. | Monitoring of GNSS Positioning Accuracy in a Given Area | |
| JP7754469B1 (ja) | 衛星航法受信局における電離圏伝搬遅延量を測定する方法及びプログラム | |
| Sammuneh et al. | Low-Cost GNSS Receivers Reliability Using Centipede RTK Network for Land Surveying. | |
| US20240159914A1 (en) | Method for taking provided gnss-relevant route information into account in the gnss-based localization of vehicles | |
| JP2020134378A (ja) | 電離圏遅延量推定誤差演算装置、電離圏遅延量推定誤差演算方法及びプログラム | |
| Shehata | Enhancing GNSS Accuracy through Advanced Precise Point Positioning Techniques |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15904103 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017540412 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15758102 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2015409237 Country of ref document: AU Date of ref document: 20150917 Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015904103 Country of ref document: EP |