WO2017188444A1 - Dispositif de couture et procédé de couture - Google Patents
Dispositif de couture et procédé de couture Download PDFInfo
- Publication number
- WO2017188444A1 WO2017188444A1 PCT/JP2017/017017 JP2017017017W WO2017188444A1 WO 2017188444 A1 WO2017188444 A1 WO 2017188444A1 JP 2017017017 W JP2017017017 W JP 2017017017W WO 2017188444 A1 WO2017188444 A1 WO 2017188444A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sewing
- arm
- control means
- product
- machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




Classifications
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B21/00—Sewing machines with devices for automatically controlling movement of work-carrier relative to stitch-forming mechanism in order to obtain particular configuration of seam, e.g. program-controlled for sewing collars or for attaching pockets
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B39/00—Workpiece carriers
Definitions
- the present invention relates to a sewing apparatus capable of performing a wide variety of sewing operations accurately and uniformly with high productivity, and also relates to a sewing method performed using the sewing apparatus.
- the basic sewing pattern (1) The first and second objects to be sewn are overlapped with each other so that the side parts of the parts to be sewn coincide with each other, and the overlapping parts of the parts to be sewn are sewn at a constant distance from the side parts.
- Fixed position sewing pattern (2) The sewing parts of the first and second sewing products are overlapped with each other so that both ends viewed in the sewing direction of the two sewing parts match each other, and the overlapping parts of the sewing parts are overlapped. Sewing, fixed length sewing pattern, (3) When carrying out the constant-length sewing pattern, during sewing, one of the sewing portion of the first sewing material and the sewing portion of the second sewing material is stretched to increase the length.
- Patent Documents 1, 2, 3, and 4 have been used to perform sewing specialized for a specific sewing pattern, but in order to implement a wide variety of sewing patterns.
- problems that increase the cost of sewing such as requiring many kinds of sewing devices, increasing the equipment cost, and requiring a lot of installation space.
- the present invention has been developed in view of such conventional problems, and can perform a wide variety of sewing operations with high accuracy and uniformity regardless of whether it is a two-dimensional sewing or a three-dimensional sewing. It is another object of the present invention to provide a sewing apparatus and a sewing method that can be performed with high productivity.
- a first aspect of the sewing apparatus is a double arm comprising a sewing machine and a first arm and a second arm that can operate a sewing product supplied to the sewing operation portion of the sewing machine by means of program control means.
- a camera provided in the double-arm robot that can capture the sewing operation unit, an image processing unit that processes image information acquired by the camera, and the image processing unit
- a command transmission unit that transmits a command to an arm control unit that controls one arm and the second arm is provided.
- a second aspect of the sewing apparatus is a double-arm robot comprising a sewing machine and a first arm and a second arm that can operate a sewing product supplied to a sewing operation unit of the sewing machine by program control means.
- a camera provided in the double-arm robot that can image the sewing operation unit, an image processing unit that processes image information acquired by the camera, and a processing result of the image processing unit.
- a command transmission unit that transmits a command to an arm control unit that controls the arm and the second arm is provided.
- the program control means includes an overlay control means for superimposing the sewing portion of the first sewing product and the sewing portion of the second sewing product so that the side portions thereof coincide with each other, and the sewing control device.
- Supply control means for supplying the overlapping portion to the sewing operation portion, and movement for moving the overlapping portion in synchronism with the sewing machine so as to sew the sewing machine at a constant distance from the side portion. It is characterized by comprising a control means.
- a third aspect of the sewing apparatus is a double-arm robot comprising a sewing machine and a first arm and a second arm capable of operating a sewing product supplied to a sewing operation unit of the sewing machine by program control means.
- a camera provided in the double-arm robot that can image the sewing operation unit, an image processing unit that processes image information acquired by the camera, and a processing result of the image processing unit.
- a command transmission unit that transmits a command to an arm control unit that controls the arm and the second arm is provided.
- the program control means includes a superposition control means for superposing the sewing portion of the first sewing product and the sewing portion of the second sewing product so that both ends viewed in the sewing direction coincide with each other.
- a supply control means for supplying an overlap portion of the sewing portion to the sewing operation portion, and moving the overlap portion in synchronization with the sewing machine so that the sewing machine is sewn to the overlap portion. It comprises a movement control means.
- a double-arm robot including a sewing machine and a first arm and a second arm capable of operating a sewing product supplied to a sewing operation unit of the sewing machine by program control means.
- a camera provided in the double-arm robot that can image the sewing operation unit, an image processing unit that processes image information acquired by the camera, and a processing result of the image processing unit.
- a command transmission unit that transmits a command to an arm control unit that controls the arm and the second arm is provided.
- the program control means includes a superposition control means for superposing the sewing portion of the first sewing product and the sewing portion of the second sewing product so that both ends viewed in the sewing direction coincide with each other.
- a supply control means for supplying an overlap portion of the sewing portion to the sewing operation portion, and moving the overlap portion in synchronization with the sewing machine so that the sewing machine is sewn to the overlap portion.
- Movement control means and when one of the sewing portion of the first sewing product and the sewing portion of the second sewing product is extended during sewing and the length is increased, It is characterized by comprising a tension control means for pulling the tip end portion of the part to be sewn as viewed in the sewing direction as necessary toward the front side in the sewing direction by the first arm and / or the second arm. is there.
- a double-arm robot comprising a sewing machine and a first arm and a second arm capable of operating a sewing product supplied to a sewing operation unit of the sewing machine by program control means.
- a camera provided in the double-arm robot that can image the sewing operation unit, an image processing unit that processes image information acquired by the camera, and a processing result of the image processing unit.
- a command transmission unit that transmits a command to an arm control unit that controls the arm and the second arm is provided.
- the program control means includes an overlay control means for superimposing a sewing portion of the first sewing product and a sewing portion of the second sewing product, and an overlapping portion of the sewing portion as the sewing operation portion.
- Supply control means for supplying and movement control means for moving the overlapping portion in synchronism with the sewing machine so that the sewing machine is sewn to the overlapping portion, and the movement control means moves the overlapping portion to the overlapping portion.
- the first arm and / or the second arm holds the unsewn overlapped portion connected to the overlapped portion where the sewing is performed.
- a sixth aspect of the sewing apparatus is a dual-arm robot comprising a sewing machine and a first arm and a second arm that can operate a sewing product supplied to a sewing operation unit of the sewing machine by program control means.
- a camera provided in the double-arm robot that can image the sewing operation unit, an image processing unit that processes image information acquired by the camera, and a processing result of the image processing unit.
- a command transmission unit that transmits a command to an arm control unit that controls the arm and the second arm is provided.
- the program control means controls the operation of the first arm and / or the second arm that holds the jig so as to supply a jig for supporting the workpiece to the sewing operation unit.
- a movement control means for moving the jig in synchronism with the sewing machine so that the sewing machine is sewn with respect to the workpiece supported by the jig. It is.
- a first aspect of the sewing method according to the present invention is a sewing method using the sewing apparatus according to the first aspect, and the first arm and the second arm performed based on image information acquired by the camera.
- the first sewing product is held by the first arm and the second sewing product is held by the second arm, and the sewing portion of the first sewing product and the second sewing product are held.
- the sewing parts of the sewing material are overlapped with the side parts of the sewing parts being aligned with each other, the overlapping part of the sewing parts is supplied to the sewing operation part, and the distance between the overlapping part and the side part is constant.
- the sewing machine is moved in synchronism with the sewing machine so that the sewing machine is sewn.
- a second aspect of the sewing method according to the present invention is a sewing method using the sewing device according to the first aspect, and the first arm and the second arm performed based on image information acquired by the camera.
- the first sewing product is held by the first arm and the second sewing product is held by the second arm, and the sewing portion of the first sewing product and the first sewing product are retained.
- the sewing parts of the two sewing products are overlapped with each other as viewed in the sewing direction so as to match each other, and the overlapping part of the sewing parts is supplied to the sewing operation part, and the overlapping part is overlapped with the overlapping part.
- the sewing machine is moved in synchronism with the sewing machine so that the sewing machine is sewn with respect to the portion.
- a third aspect of the sewing method according to the present invention is a sewing method using the sewing apparatus according to the first aspect, wherein the first arm and the second arm are performed based on image information acquired by the camera. With the required operation, the first sewing product is held by the first arm and the second sewing product is held by the second arm, and the sewing portion of the first sewing product and the second sewing product are held.
- the sewing parts of the sewing product are overlapped with each other in the sewing direction so as to match each other, and the overlapping part of the sewing parts is supplied to the sewing operation part, and the overlapping part is connected to the overlapping part.
- the sewing machine When the sewing machine is moved in synchronism with the sewing machine so that the sewing machine is sewn, the sewing parts of the first sewing product and the sewing parts of the second sewing product are sewn during sewing. If one of them stretches and length increases, the other sewing part is sewn
- the first sewn product is finally obtained by performing the sewing while pulling the tip portion viewed in step by the first arm and / or the second arm toward the front side in the sewing direction as required.
- the end portions on the front side in the sewing direction of the sewing portion and the sewing portion of the second sewing product are matched with each other.
- the 4th aspect of the sewing method which concerns on this invention is a sewing method using the sewing apparatus which concerns on the said 1st aspect,
- the said 1st arm and said 2nd performed based on the image information acquired with the said camera
- the first sewing product is held by the first arm and the second sewing product is held by the second arm, and the sewing portion of the first sewing product and the first sewing product are retained.
- 2 to overlap the portions to be sewn supply the overlapped portion of the portions to be sewn to the sewing operation portion, and sew the sewing machine to the overlapped portion so that the sewing machine is sewn to the overlapped portion.
- the overlapping part is moved in synchronization with the sewing machine, the unsewn overlapping part connected to the overlapping part where sewing is performed is slipped by the first arm and / or the second arm. It is characterized by being gripped.
- a fifth aspect of the sewing method according to the present invention is a sewing method using the sewing apparatus according to the first aspect, and a jig for supporting a sewing object is provided by the first arm and / or the second arm.
- the jig is supplied to the sewing operation unit by the required operation of the first and second arms performed based on the image information acquired by the camera and supported by the jig.
- the jig is moved synchronously with the sewing machine so that the sewing machine is sewn.
- a sewing apparatus 1 includes a sewing machine 2 and a multi-joint first arm 5 and a multi-joint capable of operating a sewing product 4 supplied to a sewing operation unit 3 of the sewing machine 2 by program control means.
- a double-arm robot 7 having the second arm 6, a camera provided in the double-arm robot 7 and capable of imaging the sewing operation unit 3, an image processing unit that processes image information acquired by the camera, Based on the processing result of the image processing unit, a command transmission unit is provided that transmits a command to an arm control unit that controls the first arm 5 and the second arm 6.
- the first sewing product 4 a is moved to the first sewing material 4 a by the required operation of the first arm 5 and the second arm 6 performed based on the image information acquired by the camera.
- the arm 5 is required to hold the second sewing product 4b and the second arm 6 is required to hold the sewing product 8a of the first sewing product 4a and the second sewing product 4b.
- 2B the side portions 9 and 9 are overlapped with each other, and the overlapping portion 10 of the sewing portions 8a and 8b is overlapped with the sewing operation portion of the sewing machine 2, as shown in FIG. 3 and the overlapping portion 10 is moved in synchronization with the sewing machine 2 so that the sewing 11 of the sewing machine 2 is performed at a constant distance from the side portion 9.
- the sewing device 1 for carrying out the sewing method is a sewing device having the above-described basic configuration
- the program control means includes a sewing portion 8a of the first sewing product 4a.
- an overlapping control means for overlapping the sewing portion 8b of the second sewing material 4b with the side portions 9 and 9 being aligned with each other, and the overlapping portion 10 of the sewing portions 8a and 8b is connected to the sewing machine. 2 and the supply control means for supplying to the sewing operation part 3 and the overlapping part 10 are moved in synchronization with the sewing machine 2 so that the sewing machine 2 is sewn at a constant distance from the side part 9.
- the movement control means is provided.
- the first sewing product 4a is moved to the first sewing product 4a by the required operations of the first arm 5 and the second arm 6 performed based on the image information acquired by the camera.
- the arm 5 is required to hold the second sewing product 4b and the second arm 6 is required to hold the sewing product 8a of the first sewing product 4a and the second sewing product 4b.
- the sewn portion 8b is overlapped with both end portions 12, 13, 14, and 15 viewed in the sewing direction so as to overlap each other, and an overlap portion 10 of the sewn portions 8a and 8b.
- Is supplied to the sewing operation part 3 of the sewing machine 2 and the overlapping part 10 is moved in synchronism with the sewing machine 2 so that the sewing machine 2 is sewn with respect to the overlapping part 10.
- the sewing apparatus for carrying out the sewing method is a sewing apparatus having the basic configuration described above, and the program control means includes a sewing part 8a of the first sewing product 4a and a sewing part 8a.
- Overlay control means for overlaying the sewing portion 8b of the second sewing product 4b by matching the respective end portions 12, 13, 14, and 15 viewed in the sewing direction, and the sewing portions 8a and 8b.
- Supply control means for supplying the overlapping portion 10 to the sewing operation portion 3 of the sewing machine 2, and the overlapping portion 10 synchronized with the sewing machine 2 so that the sewing machine 2 is sewn with respect to the overlapping portion 10. It is provided with a movement control means for moving it.
- Another example of the sewing method is a sewing method for performing the fixed-length sewing pattern described with reference to FIG. 3 so that the sewing machine 2 is sewn to the overlapping portion 10 so that the sewing machine 2 is sewn.
- the sewing machine 10 is moved in synchronization with the sewing machine 2, one of the sewing portion 8a of the first sewing material 4a and the sewing portion 8b of the second sewing material 4b extends during sewing.
- the correction sewing pattern is sewed while performing appropriate correction. If this will be described with reference to FIG. 4, for the correction, the tip end portion 16 viewed in the sewing direction of the other sewing product is moved by the first arm 5, the second arm 6, or both.
- the first sewing product is finally obtained by performing the sewing while pulling toward the front side in the sewing direction (the pulling state is indicated by an arrow F in FIG. 4B). 4a and the end parts 14 and 15 on the front side in the sewing direction of the second sewing product 4b are matched with each other.
- the sewing apparatus for carrying out the sewing method is a sewing apparatus having the basic configuration described above, and the program control means includes a sewing part 8a of the first sewing product 4a and a sewing part 8a.
- Overlay control means for overlaying the sewing portion 8b of the second sewing product 4b by matching the respective end portions 12, 13, 14, and 15 viewed in the sewing direction, and the sewing portions 8a and 8b.
- Supply control means for supplying the overlapping portion 10 to the sewing operation portion 3 of the sewing machine 2, and the overlapping portion 10 synchronized with the sewing machine 2 so that the sewing machine 2 is sewn with respect to the overlapping portion 10.
- a movement control means for moving the sewing machine, and one of the sewing portion 8a of the first sewing material 4a and the sewing portion 8b of the second sewing material 4b extends during sewing. If the length is increased, the other sewing part is sewn.
- the tip portion 16 as seen in, by the first arm 5 and the second arm 6, or by both, those comprising a tension control means pulling the required toward a sewing made direction tip side.
- Another example of the sewing method is, for example, in the sewing method for executing the fixed-length sewing pattern described with reference to FIG. 3, the first arm 5 and the first arm 5 which are performed based on image information acquired by the camera.
- the first sewing product 4a is required to be gripped by the first arm 5
- the second sewing product 4a is required to be gripped by the second arm.
- the sewing part 8a of the sewing product 4a and the sewing part 8b of the second sewing product 4b are overlapped, and the overlapping part 10 of the sewing parts 8a, 8b is supplied to the sewing operation part 3 of the sewing machine 2.
- the overlapping portion 10 is moved in synchronism with the sewing machine so that the sewing machine is sewn with respect to the overlapping portion 10, and the overlapping portion 10 is sewn when the overlapping portion 10 is moved.
- the unsewn overlapped part connected to In first arm and / or the second arm 6 is intended to be held in a state of slipping.
- the sewing apparatus for carrying out the sewing method is a sewing apparatus having the above basic configuration
- the program control means includes a sewing product 8a of the first sewing product 4a and a sewing product 8a.
- Overlay control means for superimposing the sewing product 8b of the second sewing product 4b, supply control means for supplying the overlapping portion 10 of the sewing parts 8a, 8b to the sewing operation unit 3 of the sewing machine 2,
- movement control means for moving the overlapping portion 10 in synchronism with the sewing machine 2 so that the sewing machine 2 is sewn with respect to the overlapping portion 10, and the movement control means moves the overlapping portion 10.
- the unsewn overlapped portion connected to the overlapped portion being sewn is held in a state where the first arm 5 or the second arm 6 or both slip.
- FIG. 1 Another example of the sewing method is, as shown in FIG. 1, for example, holding both side portions 20 and 21 of the jig 18 that supports the workpiece 4 by the first arm 5 and the second arm 6, By the required operation of the first arm 5 and the second arm 6 performed based on the image information acquired by the camera, the jig 18 is supplied to the sewing operation unit 3 of the sewing machine 2. The jig 18 is moved in synchronism with the sewing machine 2 so that the sewing machine 2 is sewn on the supported workpiece 4 to be sewn. When the jig 18 is relatively short, one arm may hold the jig 18 and the other arm may perform another operation.
- the other arm may perform another operation such as taking a new jig 18 or discharging the jig 18 that has been sewn. Further, when the length of the jig 18 is large, the first arm 5 and the second arm 6 change the jig 18 appropriately to sequentially move the jig 18 with respect to the sewing product 4. Necessary sewing can be performed.
- the sewing apparatus for carrying out the sewing method is a sewing apparatus having the above-described basic configuration
- the program control means attaches the jig 18 that supports the workpiece 4 to the sewing machine 2.
- Supply control means for controlling the operation of the first arm 5 and / or the second arm 6 for holding the jig 8 so as to be supplied to the sewing operation unit 3, and the jig 18.
- a movement control means is provided for moving the sewing machine 2 in synchronism with the sewing machine 2 so that the sewing machine 2 is sewn with respect to the workpiece 4 supported by the sewing machine 18.
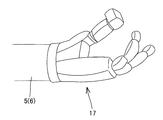
- FIG. 1 the operations of the first and second arms 5 and 6 to hold the sewing product 4 or pull the end of the sewing product 4 are shown in FIG. This can be done by providing a required gripping part such as the articulated finger part 17 as shown at the tip of the arm.
- first arm 5 and the second arm 6 are provided with required holding portions.
- first and second sewing products 4a may be used as long as they can be operated as required, and in addition to gripping them, they may be held by air adsorbing action, or may be held by a required piercing of a needle-like object, etc. May be maintained. Snippet
- the camera needs to be able to image the sewing operation unit 3 such as a required part of the first arm 5 and a required part of the second arm 6 in addition to a required part of the trunk of the double-arm robot 7. It can be provided at the site.
- the sewing product 4 may be made of leather or other sewn material in addition to the fabric.
- the sewing can be applied to various items such as clothes, shoes, bags and automobile-related parts.
- the number of workpieces 4 to be overlapped is set as required within a range that the sewing machine 2 can sew.
- the double arm robot 7 may include a monitor.
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Sewing Machines And Sewing (AREA)
Abstract
La présente invention concerne un dispositif de couture permettant d'effectuer diverses opérations de couture avec précision, uniformité et une bonne productivité. Le dispositif de couture comprend : une machine à coudre (2) ; et un robot à deux bras (7) doté d'un premier bras (5) et d'un second bras (6) qui permettent de manipuler un objet à coudre (4) qui est fourni à une unité d'opération de couture (3) de la machine à coudre. Le robot à deux bras est doté d'un appareil de prise de vues permettant de capturer une image de l'unité d'opération de couture. En outre, le dispositif de couture comprend : une unité de traitement d'image qui traite des informations d'image obtenues par l'appareil de prise de vues ; et une unité de transmission d'instruction qui transmet une instruction, sur la base du résultat du traitement effectué par l'unité de traitement d'image, à une unité de commande de bras conçue pour commander le premier bras et le second bras.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201780026132.3A CN109072520A (zh) | 2016-04-28 | 2017-04-28 | 缝制装置以及缝制方法 |
| US16/096,453 US10815594B2 (en) | 2016-04-28 | 2017-04-28 | Sewing device and sewing method |
| EP17789725.3A EP3450607A4 (fr) | 2016-04-28 | 2017-04-28 | Dispositif de couture et procédé de couture |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016091556 | 2016-04-28 | ||
| JP2016-091556 | 2016-04-28 | ||
| JP2017087527A JP6439004B2 (ja) | 2016-04-28 | 2017-04-26 | 縫製装置及び縫製方法 |
| JP2017-087527 | 2017-04-26 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017188444A1 true WO2017188444A1 (fr) | 2017-11-02 |
Family
ID=60159943
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/017017 Ceased WO2017188444A1 (fr) | 2016-04-28 | 2017-04-28 | Dispositif de couture et procédé de couture |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2017188444A1 (fr) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021510570A (ja) * | 2018-01-12 | 2021-04-30 | エドワーズ ライフサイエンシーズ コーポレイションEdwards Lifesciences Corporation | 自動心臓弁縫製 |
| JP2021147721A (ja) * | 2020-03-18 | 2021-09-27 | 東京ロボティクス株式会社 | 生地折りシステム、及び生地折り方法 |
| JP2021533933A (ja) * | 2018-08-22 | 2021-12-09 | エドワーズ ライフサイエンシーズ コーポレイションEdwards Lifesciences Corporation | 自動化された心臓弁製造デバイスおよび方法 |
| CN117758448A (zh) * | 2024-01-15 | 2024-03-26 | 东华大学 | 一种适用多功能缝制工艺的智能喂布设备及其使用方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02131888A (ja) * | 1988-11-14 | 1990-05-21 | Agency Of Ind Science & Technol | 布地ハンドリング装置 |
| JPH08257273A (ja) * | 1995-03-28 | 1996-10-08 | Gunze Ltd | ミシンの生地送りガイド装置 |
| JPH11509757A (ja) * | 1995-07-28 | 1999-08-31 | ベルガー、ヨハン | 特に繊維製の中空体を製造する装置および方法 |
| JP2015066380A (ja) * | 2013-09-30 | 2015-04-13 | ブラザー工業株式会社 | ミシン及び縫製システム |
-
2017
- 2017-04-28 WO PCT/JP2017/017017 patent/WO2017188444A1/fr not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02131888A (ja) * | 1988-11-14 | 1990-05-21 | Agency Of Ind Science & Technol | 布地ハンドリング装置 |
| JPH08257273A (ja) * | 1995-03-28 | 1996-10-08 | Gunze Ltd | ミシンの生地送りガイド装置 |
| JPH11509757A (ja) * | 1995-07-28 | 1999-08-31 | ベルガー、ヨハン | 特に繊維製の中空体を製造する装置および方法 |
| JP2015066380A (ja) * | 2013-09-30 | 2015-04-13 | ブラザー工業株式会社 | ミシン及び縫製システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3450607A4 * |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021510570A (ja) * | 2018-01-12 | 2021-04-30 | エドワーズ ライフサイエンシーズ コーポレイションEdwards Lifesciences Corporation | 自動心臓弁縫製 |
| JP7309727B2 (ja) | 2018-01-12 | 2023-07-18 | エドワーズ ライフサイエンシーズ コーポレイション | 自動心臓弁縫製 |
| JP2023100988A (ja) * | 2018-01-12 | 2023-07-19 | エドワーズ ライフサイエンシーズ コーポレイション | 自動心臓弁縫製 |
| JP2023133303A (ja) * | 2018-01-12 | 2023-09-22 | エドワーズ ライフサイエンシーズ コーポレイション | 自動心臓弁縫製 |
| US11911265B2 (en) | 2018-01-12 | 2024-02-27 | Edwards Lifesciences Corporation | Automated heart valve sewing |
| JP7479552B2 (ja) | 2018-01-12 | 2024-05-08 | エドワーズ ライフサイエンシーズ コーポレイション | 自動心臓弁縫製 |
| JP2021533933A (ja) * | 2018-08-22 | 2021-12-09 | エドワーズ ライフサイエンシーズ コーポレイションEdwards Lifesciences Corporation | 自動化された心臓弁製造デバイスおよび方法 |
| JP7391945B2 (ja) | 2018-08-22 | 2023-12-05 | エドワーズ ライフサイエンシーズ コーポレイション | 自動化された心臓弁製造デバイスおよび方法 |
| US12227888B2 (en) | 2018-08-22 | 2025-02-18 | Edwards Lifesciences Corporation | Automated heart valve manufacturing |
| US12509807B2 (en) | 2018-08-22 | 2025-12-30 | Edwards Lifesciences Corporation | Automated heart valve manufacturing |
| JP2021147721A (ja) * | 2020-03-18 | 2021-09-27 | 東京ロボティクス株式会社 | 生地折りシステム、及び生地折り方法 |
| CN117758448A (zh) * | 2024-01-15 | 2024-03-26 | 东华大学 | 一种适用多功能缝制工艺的智能喂布设备及其使用方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6439004B2 (ja) | 縫製装置及び縫製方法 | |
| WO2017188444A1 (fr) | Dispositif de couture et procédé de couture | |
| US10751871B2 (en) | Robot and method of controlling the same | |
| JP7197653B2 (ja) | 画像処理装置 | |
| CN104395042B (zh) | 机器人系统及部件的制造方法 | |
| JP7208443B2 (ja) | 直接教示操作を受け付け可能な制御装置、教示装置、および制御装置のコンピュータプログラム | |
| TWI629947B (zh) | 自動化穿鞋帶機及鞋面加工方法 | |
| CN107581713A (zh) | 自动化穿鞋带系统 | |
| US11718937B2 (en) | Adaptive apparatus for transporting and sewing material along arbitrary seam shapes | |
| CN119836496A (zh) | 用于对织物缝纫和去褶皱的系统和方法 | |
| JP6247260B2 (ja) | 様々な面の加工が可能なワイヤ放電加工機 | |
| Hu et al. | Robotic sewing and knot tying for personalized stent graft manufacturing | |
| CN119173658A (zh) | 用于缝制对象的机器人和方法 | |
| US20130269854A1 (en) | Taping machine and corresponding taping method for articles even of a complex shape | |
| WO2015075779A1 (fr) | Système de robot et procédé d'étirement pour élément annulaire | |
| CN108567200A (zh) | 自动化穿鞋带机及鞋面加工方法 | |
| US11439195B1 (en) | Apparatus to manufacture a garment from a single web | |
| Lahoud et al. | The Future of Soft Material Assembly: An Intelligent System for Autonomous Sewing Process in Industries | |
| Disimino et al. | Design and Implementation of a Cobot Arm System for Ladder Stitch | |
| US11267134B1 (en) | Garment band attachment systems and methods | |
| CN110552118A (zh) | 基于工业机器人视觉下的吸布机械手及面料抓取方法 | |
| CN117758448A (zh) | 一种适用多功能缝制工艺的智能喂布设备及其使用方法 | |
| JP2719553B2 (ja) | 自動縫製装置 | |
| JP2018153891A (ja) | ワイヤーハーネス加工装置及びワイヤーハーネスの製造方法 | |
| CN105297292B (zh) | 结合加工装置的电脑控制缝纫机定位系统及其定位方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17789725 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2017789725 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2017789725 Country of ref document: EP Effective date: 20181128 |